东南大学电工电子实验中心
实验报告
课程名称:数字逻辑设计实践
第六次实验
实验名称:可编程数字系统设计基础——模拟乒乓球游戏
院系:吴健雄学院专业:电类
姓名:学号
实验时间:2009年12月31日
评定成绩:____________________审阅教师:__________________
一、实验目的
1. 了解可编程数字系统设计的流程
2. 掌握Quartus II 软件的使用方法
3. 掌握原理图输入方式设计数字系统的方法和流程
二、实验原理
详见课本第7章内容
三、实验要求
设计一个乒乓球游戏电路。
基本要求与扩展要求见课本。
利用试验箱提供的按键、LED灯和数码管,设计一个模拟打乒乓球游戏。
①根据设计要求划分设计层次、单元模块和接口信号,画出系统框图、控制器ASM流程图、
②设计所有单元模块并编译,分析编译时产生的错误和警告信息。
③对所有的单元模块进行功能仿真,并记录和分析全部仿真结果。
④在顶层文件中连接全部单元模块并编译、综合、分配引脚和适配,可编程器件选择Altera Cyclone 1C3T。
⑤对整个系统进行时序仿真,并记录和分析仿真结果。
⑥将仿真正确的设计下载到实验箱上进行板级验证。
四、设计过程
1、划分层次、单元模块和接口信号
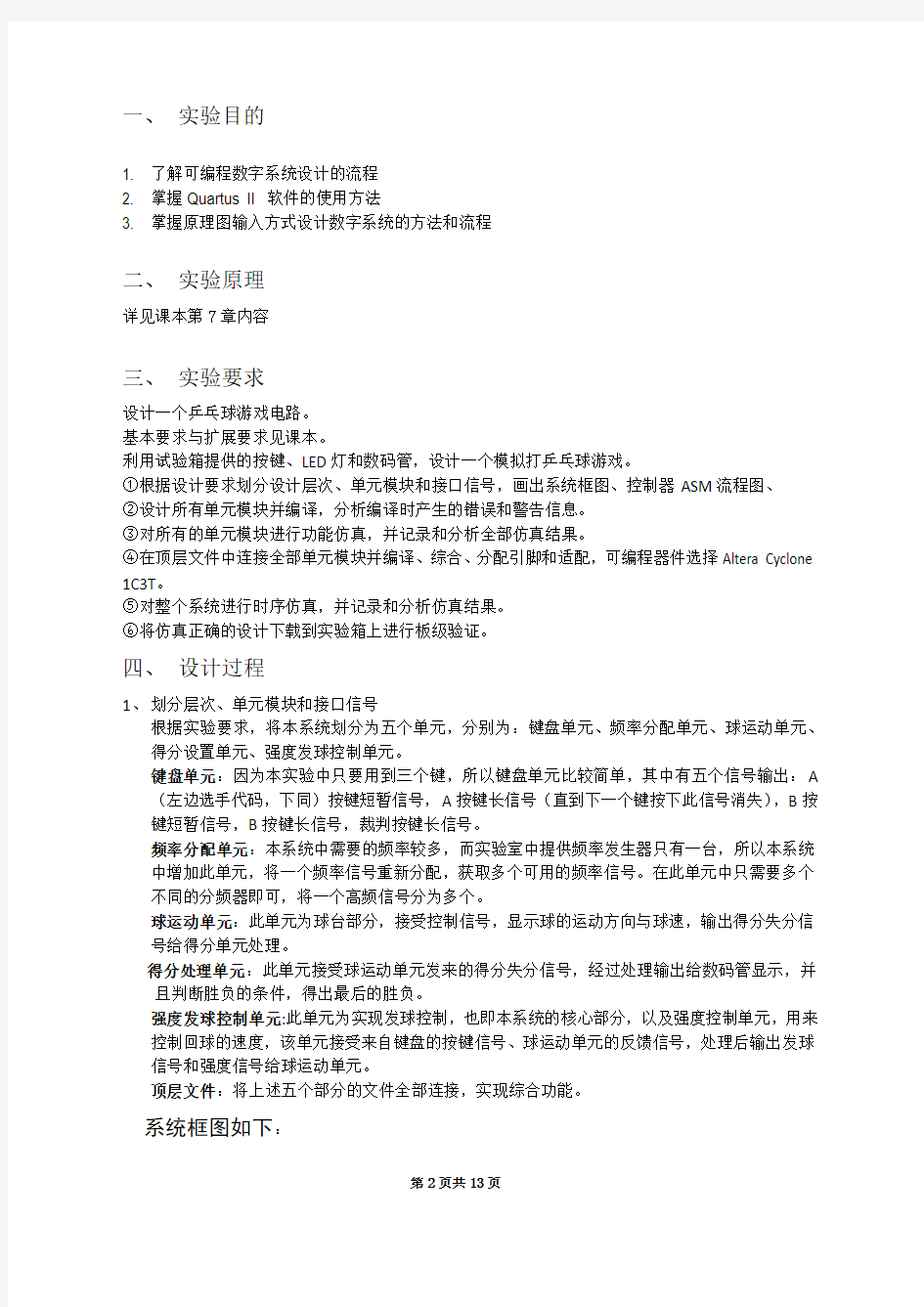
根据实验要求,将本系统划分为五个单元,分别为:键盘单元、频率分配单元、球运动单元、得分设置单元、强度发球控制单元。
键盘单元:因为本实验中只要用到三个键,所以键盘单元比较简单,其中有五个信号输出:A (左边选手代码,下同)按键短暂信号,A按键长信号(直到下一个键按下此信号消失),B按键短暂信号,B按键长信号,裁判按键长信号。
频率分配单元:本系统中需要的频率较多,而实验室中提供频率发生器只有一台,所以本系统中增加此单元,将一个频率信号重新分配,获取多个可用的频率信号。在此单元中只需要多个不同的分频器即可,将一个高频信号分为多个。
球运动单元:此单元为球台部分,接受控制信号,显示球的运动方向与球速,输出得分失分信号给得分单元处理。
得分处理单元:此单元接受球运动单元发来的得分失分信号,经过处理输出给数码管显示,并且判断胜负的条件,得出最后的胜负。
强度发球控制单元:此单元为实现发球控制,也即本系统的核心部分,以及强度控制单元,用来控制回球的速度,该单元接受来自键盘的按键信号、球运动单元的反馈信号,处理后输出发球信号和强度信号给球运动单元。
顶层文件:将上述五个部分的文件全部连接,实现综合功能。
系统框图如下:
2、 分单元设计
键盘单元:其设计与上一个实验中相同,具体在这里不详解,本系统中只是将暂时信号和长时间信号分开输出,暂时信号不经过寄存器161直接输出,而长时间信号经过寄存器寄存后输出,本系统中只需要E 、D 、F 三个键,因此只需要五个或门即可实现。具体电路见下图:
键盘单元
频率分配单元
发球强度控制单元
球运动单元
得分处理单元
频率
按键信号发球强度
信号
球运动反馈信号
频率分配单元:由两个频率信号得到五个不同频率的信号,其中高信号直接输出,频率较低的四个信号由分频器分配得到,由2Hz 的输入信号得到2Hz 、1Hz 、0.5Hz 和0.25Hz 的信号,本单元较简单,电路图如下:
球运动控制单元:此单元控制球的走向,即
本系统的状态转换,用两个194来显示球的走向,大体的状态图如下:
状态表:
由上面的状态表画出卡诺图(略),设计组合电路如下:
这是左端的194的S0与S1的输入电路图,还有右端的与其相同,不再累赘。
下面是判断哪边胜利的判断电路,判断哪边胜利可分为一下几个方面:①球未到达最后一个LED灯选手就提前按下接球信号;②球已经过了最后一个LED灯,选手还没有及时按下接球信号;③选手按下接球键后等待强度灯闪烁,若放下按键后四个强度等全部熄灭。
写出真值表,画出卡诺图(略),设计电路如下:
强度的第一个
灯
最左端球
A方长按键
A方短按键
裁判按键
在上面的两个小部分的基础上,加了八个LED灯的输出,构成了此球台控制单元的整体,其电路图如下图所示:
得分处理单元:此单元接收球运动控制单元的胜利得分信号经过处理后输出显示到数码管上,并且判断最终胜利的条件,符合条件的即可以胜利,不符合条件的则继续比赛。前面的计分比较简单,对于后面谁达到11分,判断分差是否大于等于2分,此部分判断电路较复杂,一下讨论:
判断A胜利可分为两个部分:1、两个条件:①A达到11分;②B不大于9分;2、三个条件:①A 大于等于11分;②A的得分大于B的得分;③A得分的BCD码的末位与B得分的BCD码的末位异或为0(相同,说明相差两分而不是一分,可以判断胜负)。上面两个部分为或得关系,任何一个实现都可以判断胜负。
数码管寄存采用模十计数器,其始终端分别接得分信号,来一个得分信号,使计数器增加一个数。其中比较两个八位二进制码的大小用了一个可编程比较器,这样简洁明了,便于理解。
具体的电路图如下所示:
强度发球控制单元:
1、轮换发球控制:将裁判的按键信号输入,用161作2分频,则裁判按两下161的输出变一下,可以实现两次轮发球。本系统还实现了另外的一个功能,当某一方达到11分之后,变为一次轮换发球,这可以用裁判的信号不分频直接输出。这部分电路图如下:
A 发球
B 发球
裁判信号
2、击球强度控制:由强度显示的四个LED灯的亮灭情况,我用移位寄存器来实现强度显示功能,A 按键的即时信号(按住有信号,松开无信号)、球台左侧第一个灯和一个低频率信号相与输入194的CLK端,这样当球到达最左侧之时,按下接球键,低频率信号到达194的CLK端,移位寄存器开始工作,强度灯闪烁。当松开按键时,194停止一位,其将会输出一个BCD码,通过下表的转换,经过组合电路,输出信号输入到数据选择器,选择适当的频率输入到球运动单元的CLK端。发球强度选择真值表如下:
画出卡诺图(略),设计电路如下:
则此部分的总的电路图由以上两个部分组成,具体如下
根据各部分的电路图,以及系统框图,将各个单元的电路在顶层文件中组合,顶层文件电路图如下:
3、对所有单元模块进行编译,分析编译时产生的错误和警告信息。
4、对所有单元进行功能仿真,并记录和分析全部仿真结果。
各个部分的功能仿真结果如下:
键盘部分:
按下裁判E键后的功能仿真图:
其他按键的功能仿真略。
频率分配单元:
球运动控制单元:
仿真说明:仿真步骤如下1、首先建立波形,设置输入信号,先设置频率信号,在加入裁判键信号,在E输入加入一段1电平,在之后加入左击球信号在D上加上即时信号,在D_上加上长时间信号,并将QL设为高电平,输入信号完毕;2、打开功能仿真,打开建立波形文件,先进行编译,在进行仿真,仿真图如下,最终符合设计要求:裁判按下,左选手按下,球由左向右移动,移动频率为所加频率。
得分设置单元:
仿真说明:仿真步骤同上相同,输入得分信号,可以看到输出计数器工作,此部分功能正常。
强度发球控制单元:
仿真说明:裁判按下开球键,当左边选手按下击球键时,强度灯闪烁,当放下左侧击球键时,强度灯停止,选择所需要的频率从CLK_L输出,送到球运动的频率上。各部分功能符合设计需要。
顶层文件:
由于顶层文件模拟时需要将按键的时间长短考虑进去,所以无法将按键长短输入,并且无法再屏幕上显示,因为按键信号频率与原始频率相比要小得多,所以在此不再将模拟图片放上。
5、在顶层文件中编译文件,分配引脚。
6、将仿真正确的设计系统下载到实验箱中进行验证,验证结果正确,完全符合设计要求。
五、实验分析与总结
本次实验是设计一个模拟乒乓球的游戏,从开始准备实验到最终验收完成、直至写好报告有一路的收获。
在实验设计中,首先学习Quarters的使用设计方法,到学习可编程数字系统的设计一般流程与方法,再到具体设计,在设计的过程中,学习到得主要如下:设计分模块,简化设计;对模块内各个部分的功能写出真值表,画卡诺图,设计组合电路的步骤;尽量少用ROM,其可以用组合电路代替,ROM只是实践中简化连线,用组合电路可以让我们加深设计步骤与思想;注意时序电路,设计必要时用D触发器实现数据的寄存;避免险象与冲突;功能仿真中信号的输入方法,注意各个操作的步骤,在输入信号中体现;实验中遇到错误,分析方法,从预测结果与实际结果出发,寻找错误的根源。
在实验报告中,做完实验后,在写实验报告的过程中,对本实验做出进一步的思考,最大的收获是设计数字系统的方法,自顶向下的设计思想,状态转换的思想,对今后做实验有很大帮助。
乒乓球课总结 本学期体育课在不知不觉中即将结束,现在回想一下其中还是充满许多甜美的汗水,更没想到现在正坐在电脑前写着本学期的体育课总结。其实体育课是大学生活中不可或缺的一个组成部分,因为它不仅可以舒暖平时腐朽的躯体,从繁忙的专业课中解脱出来,更好的是可以痛快的玩一场,而且在潜移默化中提高了我们的身体素质,使我们保持健康的体魄。 对于体育活动还是比较热衷的,爱好也挺广泛,许多项目都有所涉猎。本学期体育课凭着自己的兴趣选择了乒乓球,乒乓球是中国的国球,著名的乒乓外交政策,打开了中国与世界沟通的渠道,也使世界重新去认知一个正在崛起的东方大国,一个不朽的神话。中国乒乓球在世界上的地位还是比较稳固的,至今无他国可以撼动。作为一名中国人,还是引以为傲的。乒乓球也是一项比较大众化的体育项目,接触它比较早,但从未真正的系统化的学过,我也是想接此次机会多了解一些关于乒乓的专业知识。 一个学期下来收获还是不少的,从最初朦朦胧胧的模糊概念,到现在大体知道其中的规则,该注意些什么问题,有些什么技巧等。其实挺佩服我们老师的,他不仅是榜样,更是一种无形的力量。当他给我们示范打球的基本姿势时,才发现他是左右开工的,更绝的是他左右手使用不同的拍型,想当年他也是乒乓健将呀!我也比较喜欢此类活动,因为可以结识更多的朋友,在与之配合中不仅提高了技术,而且还有甚多的乐趣,其乐融融,这才是真正体育课目的之所在。在我们队伍之中也少不了女同胞,她们的实力不可忽视,但对比运动天赋较强的男生来说还是逊色一些,不过我们互帮互助,共同练习一项自己持久的运动。 对于自己的乒乓球技术还是有许多不足的地方,比如发球不够旋,接球不到位,脚下的步伐不够稳,其实这些所谓的缺点归为一点就是基本功不扎实,从最基本的推打中就看出来了,平时就知道瞎打,不曾知其中之原委,不过我相信我会在日后的学习生活中定将乒乓进行到底,纠正其中的错误,使自己乒乓技术更加娴熟,因为这是我的兴趣所致。 对于体育课还有什么值得改进的地方,我觉得应该更注重培养兴趣,因为兴趣是一切事情的原动力,只有同学们真正觉得这件事有很大的乐趣,他们才会真
智能机器人实验报告1 学院:化学与材料科学学院 学号: 2015100749 姓名:朱巧妤 评阅人:评阅时间:
实验1 电驱动与控制实验 (一)实验目的 熟悉和掌握机器人开发环境使用,超声传感器、碰撞传感器、温度传感器、颜色传感器等常见机器人传感器工作原理与使用方法,熟悉机器人平台使用与搭建;设计一个简单的机器人,并采用多种程序设计方法使它能动起来。 (二)仪器工具及材料 计算机、机器人实验系统、机器人软件开发平台、编程下载器等设备。 (三)内容及程序 实验内容: (1)碰撞传感器原理与应用; (2)颜色传感器原理与应用; (3)测距传感器原理与应用; (4)温度传感器原理与应用; (5)熟悉开发环境使用与操作;设计一个简单轮式移动机器人,并使用图形化编程方式实现对机器人的控制,通过该设计掌握机器人开发平台的结构设计、程序设计等基本方法。 实验步骤: 1)首先确定本次要做的机器人为货架物品颜色辨别的机器人。 2)根据模型将梁、轴、插销、螺丝等零件拼装成一个货架台 3)将货架台安装上可识别颜色的摄像头,并装在控制器上方,将两个摄像头的连接线分 别插入控制器的传感器接口,将显示器连接线插入传感器接口。 4)拼装完成后将控制器连接电脑,在电脑上运用Innobot软件对机器人进行颜色识别动 作的编程,拖动颜色传感器模块,对应选择数码管接口以及两个摄像头的接口,使机器人能将货架台上物品的颜色反应到数码管上。 5)将所编程序进行上传。测试看机器人是否能将颜色反映到显示器上完成所编动作。
(四)结果及分析 使用梁和轴以及螺钉拼装出货架台。 将拼装好的货架台装到传感器上。
1绪论 1.1选题背景 1.1.1 课题目的及意义 本次课程设计的容是独立完成一个乒乓球比赛游戏机的设计,采用EWB电路仿真设计软件完成乒乓球比赛游戏机电路的设计及仿真调试,在微机上仿真实现乒乓球比赛游戏机的设计。通过这次课程设计让我们了解和熟悉了乒乓球游戏机的原理和Multisim仿真设计软件的操作,也让我们加深了解了对双向移位寄存器、双D触发器及、加法器及逻辑门电路的一些实际用途,并将理论与实践相结合。 1.1.2 课题的容和要求 独立完成一个乒乓球比赛游戏机的设计,采用EWB电路仿真设计软件完成乒乓球比赛游戏机电路的设计及仿真调试,在微机上仿真实现乒乓球比赛游戏机的设计。 课程设计具体容如下:乒乓球比赛是由甲乙双方参赛,加上裁判的三人游戏(也可以不用裁判),乒乓球比赛模拟机是用发光二极管(LED)模拟乒乓球运 乒乓球比赛模拟机框图 设计要求:
1、基本部分 (1) 至少用8个LED排成直线,以中点为界,两边各代表参赛双方的位置,其中一个点亮的LED(乒乓球)依次从左到右,或从由到左移动,“球”的移动速度能由时钟电路调节。 (2) 当球(被点亮的那只LED)移动到某方的最后一位时,参赛者应该果断按下自己的按扭使“球”转向,即表示启动球拍击中,若行动迟缓或超前,表示未击中或违规,则对方得一分。 (3) 设计自动记分电路,甲乙双方各用一位数码管显示得分,每记满9分为一局。 2、发挥部分(选做) (1) 甲乙双方各设一个发光二极管表示拥有发球权,每得5分自动交换发球权,拥有发球权的一方发球才能有效。 (2) 发球次数能由一位数码管显示。 (3) 一方得分,电路自动响铃3秒,此期间发球无效,等铃声停止后方可比赛。 课题任务要求 1、画出总体设计框图,以说明乒乓球比赛游戏机由哪些相对独立的功能模块组成,标出各个模块之间互相联系,时钟信号传输路径、方向和频率变化。并以文字对原理作辅助说明。 2、设计各个功能模块的电路图,加上原理说明。 3、选择合适的元器件,在EWB上连接验证、仿真、调试各个功能模块的电路。在连接验证时设计、选择合适的输入信号和输出方式,在充分电路正确性同时,输入信号和输出方式要便于电路的仿真、调试和故障排除。 4、在验证各个功能模块基础上,对整个电路的元器件和连接,进行合理布局,进行整个数字钟电路的连接验证、仿真、调试。 5、自行接线验证、仿真、调试,并能检查和发现问题,根据原理、现象和仿真结果分析问题所在,加以解决。学生要解决的问题包括元器件选择、连接和整体设计引起的问题。 1.2 方案选择 根据设计任务,对照图乒乓球比赛模拟及1.1,可以分为三个模块进行设计:
我对乒乓球课的感受和认识 姓名:李传新 学院专业:资环学院土管三班 学号:20095753 说起来接触乒乓球可以追溯到小时候拿着乒乓球在地上乱砸的年代了,但是真正的开始拿起拍子来打却是到了初二的时候了,鉴于本人资质平庸,所以这五六年来技术一点进展都没有,所以想凭这一个学期乒乓球课上来个大的飞跃的话也不太可能,因此要做一个技术上的总结几乎是不可能了,虽然很小就接触乒乓球,真正系统学习,却是在今年的体育选修课。我们今年的学习,理论和实战练习,穿插进行,一年下来,乒乓球的水平可谓突飞猛进,对于乒乓球的规则打法,也有了初步的认识理解。下面我就简单讲一下通过这学期的学习我对乒乓球的新的认识和感受。 教我们的庄老师很可爱,不是很高,看起来就很和蔼、友善,其人也真的是很友善,还有些小幽默。在老师的指导下,我才矫正了自己长期以来的握球拍姿势,也掌握了如何压球的要领。良好的基础在正确的理论指导下,终于有所见效,打起来顺手多了。上乒乓球课果然很轻松,大部分时间是我们自己练习的,因为乒乓球不同于其他深奥的理论,是不需要老师做什么详细的教学的,完全靠多练习,练出手感的。毕竟很久没打乒乓球了,手感还真不是怎么滴,总打不出几个好球。上了几节课之后,发现会打的很多,当然也有才刚开始接触乒乓球的同学,跟着这么多不同年级不同学院的同学一起上课,我发
现了自己的很多不足,甚至连自己小学时候的水平都没达到。 刚进入课程的时候,看到班里有好几个同学都很有基础,打的很好,我就有一点自卑,觉得害怕自己学不会。但是在庄老师耐心的讲解下,我发现看似飘忽不定的乒乓球其实并非无章可循。它和任何其它的球类一样,都有自己的基本功和技法。只要按照老师说的去练习,我就能够逐渐进步。在开始的几次我都打不好,老师告诉我不要急,只要把动作尽量做好,就能够自然而然地打好。事实验证了他的话。 乒乓球课是汗水与成就感的交融。只在上课时认真聆听老师的讲解还不够,还须有亲自的感受与实践。一次又一次地做模仿动作,一次又一次的细心体验,一次又一次地纠错。不停地挥拍,不停地移动步伐,连捡球也是种体能消耗。可挥洒汗水的同时,我们也得到了成功的喜悦。 再谈谈这一学期的收获。我通过这一学期的学习,我将乒乓球的基本动作都以基本掌握。我们从握拍学起,接着学了发球,这些基本动作对我这个乒乓球爱好者来说非常重要。接着就学习了攻球。老师将发球分解成几个动作,让我们一个动作一个动作的练习。说来也惭愧,我现在攻球还没过关,不过我会努力的。 真的很感谢老师的帮助,他使我更快的改正自己的错误,使我少走了很多弯路,让我更快的掌握了乒乓球的基本知识,这对以后
一、机器人的定义 美国机器人协会(RIA)的定义: 机器人是一种用于移动各种材料、零件、工具或专用的装置,通过可编程序动作来执行种种任务的、并具有编程能力的多功能机械手。 日本工业机器人协会(JIRA—Japanese Industrial Robot Association):一种带有存储器件和末端执行器的通用机械,它能够通过自动化的动作替代人类劳动。(An all—purpose machine equipped with a memory device and an end—effector,and capable of rotation and of replacing human labor by automatic performance of movements.) 世界标准化组织(ISO):机器人是一种能够通过编程和自动控制来执行诸如作业或移动等任务的机器。(A robot is a machine which can be programmed to perform some tasks which involve manipulative or locomotive actions under automatic control.) 中国(原机械工业部):工业机器人是一种能自动定位控制、可重复编程、多功能多自由度的操作机,它能搬运材料、零件或夹持工具,用以完成各种作业。 二、机器人定义的本质: 首先,机器人是机器而不是人,它是人类制造的替代人类从事某种作业的工具,它能是人的某些功能的延伸。在某些方面,机器人可具有超越人类的能力,但从本质上说机器人永远不可能全面超越人类。
电子线路综合设计 乒乓球比赛模拟及计分器设计 2014年6月
摘要 在信息社会高速发展的今天,数字电路芯片已经实现高度集成化,并逐步渗透到医学、计算机等各个领域,对人类的生活有着深远的影响。本设计采用基本门电路以及74LS系列芯片的搭建,以multisim 12.0软件为平台进行仿真,实现了对乒乓球游戏的模拟。主要解决的问题有: (1)模拟乒乓球的轨迹:用双向移位4位寄存器74194以及基本门电路实现;(2)球速的调节:利用555电路实现; (3)球被击中、犯规的判断; (4)计数器的使用:采用74LS90和74LS161的组合,给玩家计分; (5)关于比分的显示:通过CD4511译码芯片将计数器的输出状态显示到2位共阴极数码管上。 关键词:双向移位4位寄存器、555电路、译码电路、计数器系统
目录 1 设计任务 (1) 2 电路整体设计 (2) 2.1 译码显示电路设计 (4) 2.2 555定时器组成脉冲发生器 (5) 2.3模拟乒乓球电路的设计 (6) 3 电路整体性能的检测 (7) 3.1 译码显示电路的检测 (7) 3.2 脉冲发生器电路的检测················································································· 3.3模拟乒乓球电路的检测··················································································4实验结论····················································································································5课程设计心得体会以及建议····················································································6 Abstract ······················································································································7附录(包含元器件清单以及各元器件功能表) ······················································8参考文献····················································································································
乒乓球教学总结800字 一学期来在教学中有成功和喜悦,,现将自己本期在探索学习新课程理念下的第二课堂教学作一个简要总结。 (1)激发学习兴趣,在游戏中学知识。 首先激发学生学习的愿望。第一步,观看乒乓球录象资料,接着在室外乒乓球课堂教学中,有步骤地分别学习乒乓球握拍——原地乒乓球颠球—对墙击——台上自发球——师生喂球——同学间的练 习及家人练习。在此基础上开展自由练、计时颠、计数颠、接力颠、比谁击的准、台上比谁挡的多、乒乓球比赛简单规则、记分比赛等。总之,始终把学生放在问题情境中,让他们既能体会和掌握乒乓球动作要领,又能领略到在游戏、竞赛中的挑战成功和快乐感。以此达到进一步激发和巩固学生学习动机和学习兴趣。 (2)提供学生自主探索、合作交流的机会。 新课程标准强调,学生学习的主要方式应该是动手实践、自主探索和合作交流,这是当前课程改革的重要理念之一。为此,我在教学颠球时将学生分成4个合作小组,即三、一;三、二;四、一;四、二;并注意引导学生间的观察、交流、合作学习机会。如适时地向学生提出:为什么他比我颠得多?为什么小小乒乓球就听他的话呢?接着就请颠得多的同学示范和交流。而对起步较快的同学不断地给他们设计新目标。如学生获得“小老师”挂牌后,紧接着就开展“小老师”间的比赛,即比谁带的“小学生”进步多。一旦辅导的“小学生”有进步后,就可获得一面“小五星”。当这一奖励制度出台后,在乒乓
球课堂教学中掀起了一场“兵教兵”的自主探索、合作交流热浪。你看,课堂出现了“一对一”、手把手、头碰头、耐心细致地教与学的可喜局面??。每当他们教的“小学生”有进步时,哇!可别提有多高兴啊,这时的“小老师”和学生都会情不自禁地,连蹦带跳、飞跃似地跑到老师的面前高喊到:“我又有进步啦!”、“我又可以多得一个小五星啦!”好象他们要向全世界宣布他们的骄傲、他们的成功!总之,在课堂上,我尽量为他们提供自主探索、合作交流的机会。让学生在合作成功中得到了次次丰富情感的体验。 (3)注重课堂教学中的即时评价。 评价不仅要关注学生的学习成绩,而且要发现和发展学生多方面的潜能。因此,在教学中,我注意适时的使用赞赏或鼓励性的语言。“你真棒!你聪明!你能行!真了不起??”总之,在三、四年级乒乓球教学中,根据不同的学生而采取不同的即时评价。 (4)关注每一个学生。 任何教学活动中都存在个体差异。不讽刺、不挖苦、不打击学生,关注、关爱每一个学生。我是这样做的:老师个别指导与同伴帮助相结合,对他们每一次点滴进步及时肯定和表扬,相信他们最终都能先后达到终点。事实证明我所任的四个班级教学中,迟到到达终点的优秀学生不乏有人。 总之,通过校本课程乒乓球的学习使我深深懂得了要做一名好老师,就一定要不断改进自己的教学方法,并使课堂教法不断地适应学生的学法,同时,还应善于捕捉每个学生身上的“闪光点”,发现
乒乓球运动开题报告 导语:心中始终藏着你的影子,在我的心上打着结,结着你的情意绵绵,结着你的相思不断,挽成一个死扣,任今生荒唐也罢,哀怨也罢,再也无法解开。以下为大家介绍乒乓球运动开题报告文章,欢迎大家阅读参考! 关键词乒乓球运动发展现状对策研究 乒乓球是中国体育界的一面旗帜,1959年,容国团在第25届多特蒙德世乒赛上为我国夺得第一个乒乓球世界冠军之后,这面旗帜一直屹立不倒、中国乒乓球队自首次参加世乒赛至今,尽管经历了无数的风风雨雨、起起落落、但无论是奥运会、世锦赛、世界杯还是一系列的公开赛,我国乒乓球运动员都取得骄人的成绩、制下的中国乒乓球长盛不衰,一直站在世界的顶峰,称霸乒坛、改革开放二十多年来,随着我国经济的快速增长,社会的和谐发展,我国竞技体育取得了举世瞩目的成就。 如何撰写乒乓球硕士论文 1世界乒乓球技术发展趋势 目前乒乓球的技术发展趋势主要有竞技能力的个性化,主要的焦点是“特长突出”才会在当今乒坛占有一席之地,如刘国梁、马琳的直拍横打;瓦尔德内尔、萨姆索洛夫的横拍弧圈球打法都各有所长、所以运动员应该在特长技术上下功夫、第二就是技术构建的立体化,中国乒乓球能有如此强大的实力就在于其立体化,面对各国不同的打法都能从容应战并能战无不胜、近台为主,结合远台;前三板技术为
取胜关键;发球抢攻等等都是立体化的表现、第三点就是女子乒乓球技术逐渐向男性化发展、乒乓球世界男子技术水平就是世界乒乓球的最高水平,所以女子只有向着男子技术化方向发展肯定能掀起一波惊奇、未来乒乓球的发展的趋势可以看出乒乓球女子项目必然向男性化转变。 2世界乒乓球运动发展出现的困境分析 2、1乒乓球运动的发展出现了瓶颈 从最近的乒乓球世界性大赛和最新世界乒乓球选手排名我们可以看出目前乒乓球运动的发展已经出现了一边倒的倾向,它的发展和影响力不是世界性的而是只局限在欧亚,尤其以亚洲为主、我国有很多优秀的乒乓球运动员目前已经加入了其他国家的乒乓球运动员之中,他们的加入对当地乒乓球运动发展也起到了很大的作用,为其他国家的乒乓球运动作了伟大的贡献。 2、2世界乒乓球运动面临着发展萎缩危机 从世界乒乓球发展的第五阶段到现在,世界锦标赛、世界杯和奥运会等大型比赛中在大多决赛都是在中国队或亚洲队之间进行,长此下去,使原本投入较多的国家失去信心而放弃努力,转而把力量投到其它可竞争的项目上,非洲与美洲发展更加滞后,这样就无疑形成了世界乒乓球的发展重心严重倾向于欧亚,可想而知,这样畸形的发展下去后果是不堪设想的,可能会使世界乒乓球运动的发展走进死胡同,面临着发展萎缩的危机、 2、3乒乓球超级联赛发展相对缓慢
北京理工大学珠海学院实验报告 实验课程:工业机器人实验名称:实验一:工业机器人认识 教师:时间:班级:姓名:学号: 一、实验目的与任务 了解6自由度工业机器人的机械结构,工作原理,性能指标、控制系统,并初步掌握操作。了解6自由度工业机器人在柔性制造系统中的作用。 二、实验设备 FMS系统(含6-DOF工业机器人) 三、实验内容与步骤 1、描述工业机器人的机械结构、工作原理及性能指标。 2、描述控制系统的组成及各部分的作用。
3、描述机器人的软件平台及记录自己在进行实际操作时的步骤及遇到的问题以及自己的想法。教师批阅:
北京理工大学珠海学院实验报告 实验课程:工业机器人实验名称:实验二:机器人坐标系的建立 教师:时间:班级:姓名:学号: 一、实验目的与任务 了解机器人建立坐标系的意义;了解机器人坐标系的类型;掌握用D-H方法建立机器人坐标系的方法与步骤。 二、实验设备 FMS系统(含6-DOF工业机器人) 三、实验内容与步骤 1、描述机器人建立坐标系的意义以及机器人坐标系的类型。 2、深入研究机器人机械结构,建立6自由度关节型机器人杆件坐标系,绘制机器人杆件坐标系图。
教师批阅:
实验课程:工业机器人实验名称:实验三:机器人示教编程与再现控制 教师:时间:班级:姓名:学号: 一、实验目的与任务 了解机器人示教编程的工作原理,掌握6自由度工业机器人的示教编程与再现控制。 二、实验设备 FMS系统(含6-DOF工业机器人) 三、实验内容与步骤 1、描述机器人示教编程的原理。 2、详细叙述示教编程与再现的操作步骤,记录每一个程序点,并谈谈实验心得体会。教师批阅:
实验原始记录 专业、班级_______ 姓名_______ 同组人姓名_________ 课程名称__________________ 实验名称________________ 实验记录: 实验日期任课教师
一、实验目的: 培养综合运用数字电子技术知识进行简易数字电子系统设计,及利用EWB软件进行仿真的能力。 二、实验任务: 1.选题:模拟乒乓球比赛电路 模拟乒乓球比赛通过设计,采用数字芯片实现乒乓球左右移动、选手击球、得分、累计得分到9分报警等功能。该设计三个双向开关S1、S2、S3分别作为裁判和两选手的击球动作,同时选手可以从译码显示器上直接读出自己的得分,具有操作简单、结构清晰的优点。 2.设计目标: 该模拟乒乓球比赛电路主要有4块电路:时钟信号产生电路、球台驱动电路、控制电路和计分电路。其中球台电路主要实现选手击球完毕后球的左右移动显示位置功能;控制电路实现选手击球、裁判功能;计分电路具有当选手击球有效时加分和当选手的分数累计到9分时报警功能。 3.设计要求: 1)用8个发光二极管表示球,将8个发光二极管排成一条直线,以中点为界,两边各代 表参赛双方的位置,其中点亮的发光二极管代表“乒乓球”的当前位置,点亮的发光二极管依次由左向右或由右向左移动。用两个开关和2个发光二极管分别表示AB两个球员的球拍; 2)一方发球后,球以固定的速度向另一方运动(发光二极管依次逐个点亮),当球达到另 一方的最后一个二极管时,参赛者应立即按下自己一方的按钮,即表示击球,若击中,则“球”向相反方向运动,若未击中,则对方得1分。 A、B各有一个数码管计分。 3)裁判有一个按钮,用来对使选手准备,每次得分后按下一次。 三、设计注意事项: 1)选用Workbench含有的芯片。
Shaanxi University of Technology 通信工程专业课程设计Ⅱ 题目乒乓球游戏机设计 学生贾潇洒学号0713024056 所在院(系)陕西理工学院电信工程系 专业班级通信工程专业0 7 2 班 指导教师争兵 完成地点陕西理工学院电信工程系实验室 2010年 3 月 19 日
通信工程专业课程设计Ⅱ任务书 院(系) 电信工程系专业班级通信工程专业 072班学生贾潇洒 一、课程设计Ⅱ题目乒乓球游戏机设计 二、课程设计Ⅱ工作自 2010 年 3 月 1 日起至 2010 年 3 月 19 日止 三、课程设计Ⅱ进行地点: 电信工程系实验室 四、课程设计Ⅱ的容要求: [1]本课程设计的目的 本次课程设计为计算机类综合课程设计,通过计算机这个平台使我们将所学习的理论知识应用到实践中的一次尝试,同时也是对计算机辅助软件Max-pulsII的进一步熟悉。 [2]本课程设计的容 采用EDA技术---可采用VHDL或原理图输入法,设计一个乒乓球游戏电路,进行声光模拟,结果应有仿真波形、流程图、并下载在EDA开发板上,测试验证无误。 [3]本课程设计要实现的功能 用8个(或更多个)发光二极管排成一条直线代表乒乓球台,中间两个发光二极管兼做乒乓球网,两边各有两个开关控制双方的发球和接球,并能自动完成裁判、记分等功能。 [4]课程设计时间安排:3月1日-3月3日,熟悉容,方案论证; 3月4日-3月10日,编写程序、运行及仿真; 3月11日-3月12日,下载并验证其功能; 3月16 日,验收课程设计; 3月16日-3月19日,撰写、修改、提交课程设计报告。 指导教师系(教研室) 通信工程教研室接受任务开始执行日期 2010年3月1日学生签名
乒乓球校本课程总结 代课教师:雷雅涵本学期共进行校本课程七节,每节课40分钟。上课内容为乒乓球基本知识讲解,乒乓球正手进攻动作要领讲解。一般练习球发球动作讲解及训练,正手定点训练等。 在上课过程中,大部分学生都能准时上课,不迟到不早退,并保证上课的积极性与主动性。全部学生共分为四个小队,每个队根据队员球技水平情况任命一名队长,队员都能在队长带领下按照老师要求有秩序有纪律的完成每次课堂任务。因为学生之前乒乓球基本水平不一样,加上训练时间少以及人数多等多项原因制约,导致课程在进行时存在一些问题。现分析如下: 一、学生人数过多,球台有限,每个学生每次上课的训练时间过少,教师对学生的指导也有限。。 二、部分学生之前有一些培训经验,教师指导时可以很快理解并及时改正不正规的打法。但大部分学生是零基础,加上超过乒乓球训练最佳年龄,上课时很难领悟及应用到教师所教授的知识。 三、个别学生上课态度不够端正,有忘带球拍、球的事件,并在训练过程中不按教师指示训练,自己乱打一气,扰乱课堂正常秩序。 以上是本学期乒乓球校本课程进行中存在的三个大问题,针对这三个大问题,我在总结与反思的同时提出以下解决方法。 一、严格控制球队人数,确保每个队员都能有足够的时间与机会,好好利用上课时间完成训练内容,提高个人球技。
二、教师加大对基本功动作要领的指导,让学生在反复练习中掌握好基本动作的应用,提高定点对攻的质量与数量。 三、向学生灌输课堂秩序的重要性,严惩破坏纪律的学生。 四、根据学生不同情况因材施教,分层次训练,确保每个学生通过这门课程都能有所收获。 五、创造轻松愉快的课堂气氛,让学生感受到体育运动的乐趣与国球的魅力,调动学生上课积极性,提高学生身体素质。 乒乓球的训练是长期的也是潜移默化的,教师需要有足够的耐心与毅力一点一点的提高学生的打球技能,让学生最好的理解与掌握所学知识。希望在以后的工作中,我能更好利用本课程传授学生乒乓球的相关知识与技能,旨在提高学生的身体心理素质,丰富学生的课余生活。
实验一 机器人运动学实验 一、基本理论 本实验以SCARA 四自由度机械臂为例研究机器人的运动学问题.机器人运动学问题包括运动学方程的表示,运动学方程的正解、反解等,这些是研究机器人动力学和机器人控制的重要基础,也是开放式机器人系统轨迹规划的重要基础。 机械臂杆件链的最末端是机器人工作的末端执行器(或者机械手),末端执行器的位姿是机器人运动学研究的目标,对于位姿的描述常有两种方法:关节坐标空间法和直角坐标空间法。 关节坐标空间: 末端执行器的位姿直接由各个关节的坐标来确定,所有关节变量构成一个关节矢量,关节矢量构成的空间称为关节坐标空间。图1-1是GRB400机械臂的关节坐标空间的定义。因为关节坐标是机器人运动控制直接可以操纵的,因此这种描述对于运动控制是非常直接的。 直角坐标空间: 机器人末端的位置和方位也可用所在的直角坐标空间的坐标及方位角来描述,当描述机器人的操作任务时,对于使用者来讲采用直角坐标更为直观和方便(如图1-2)。 当机器人末端执行器的关节坐标给定时,求解其在直角坐标系中的坐标就是正向运动学求解(运动学正解)问题;反之,当末端执行器在直角坐标系中的坐标给定时求出对应的关节坐标就是机器人运动学逆解(运动学反解)问题。运动学反解问题相对难度较大,但在机器人控制中占有重要的地位。 图1-1 机器人的关节坐标空间 图1-2 机器人的直角坐标空间法
机器人逆运动学求解问题包括解的存在性、唯一性及解法三个问题。 存在性:至少存在一组关节变量来产生期望的末端执行器位姿,如果给定末端执行器位置在工作空间外,则解不存在。 唯一性:对于给定的位姿,仅有一组关节变量来产生希望的机器人位姿。机器人运动学逆解的数目决定于关节数目、连杆参数和关节变量的活动范围。通常按照最短行程的准则来选择最优解,尽量使每个关节的移动量最小。 解法:逆运动学的解法有封闭解法和数值解法两种。在末端位姿已知的情况下,封闭解法可以给出每个关节变量的数学函数表达式;数值解法则使用递推算法给出关节变量的具体数值,速度快、效率高,便于实时控制。下面介绍D-H 变化方法求解运动学问题。 建立坐标系如下图所示 连杆坐标系{i }相对于{ i ?1 }的变换矩阵可以按照下式计算出,其中连杆坐标系D-H 参数为由表1-1给出。 齐坐标变换矩阵为: 其中描述连杆i 本身的特征;和描述连杆i?1与i 之间的联系。对于旋转关节,仅是关节变量,其它三个参数固定不变;对于移动关节,仅是关节变量,其它三个参数不变。
初中物理实验报告的范文 篇一:初中物理实验报告(921字) 器材 找一个底面很平的容器,让一个蜡烛头紧贴在容器底部,再往容器里倒水,蜡烛头并不会浮起来;轻轻地把蜡烛头拨倒,它立刻就会浮起来。 可见,当物体与容器底部紧密接触时,两个接触面间就没有液体渗入,物体的下表面不再受液体对它向上的压强,液体对它就失去了向上托的力,浮力当然随之消失了。 现在,你能提出为潜艇摆脱困境的措施了吗? “浮力是怎样产生的”,学生对“浮力就是液体对物体向上的压力和向下的压力之差”这一结论是可以理解的,但却难以相信,因此做好浮力消失的实验是攻克这一难点的关键,下面介绍两种简便方法。 [方法1] 器材:大小适当的玻璃漏斗(化学实验室有)一个、乒乓球一只、红水一杯。 步骤: (1)将乒乓球有意揿入水中,松手后乒乓球很快浮起。 (2)用手托住漏斗(喇叭口朝上,漏斗柄夹在中指和无名指之间),将乒乓球放入其中,以大拇指按住乒乓球,将水倒入漏斗
中,松开拇指,可见乒乓球不浮起,(这时漏斗柄下口有水向下流,这是因为乒乓球与漏斗间不太密合)。 (3)用手指堵住出水口,可见漏斗柄中水面逐渐上升,当水面升至乒乓球时,乒乓球迅即上浮。(若漏斗柄下口出水过快,可在乒乓球与漏斗接触处垫一圈棉花,这样可以从容地观察水在漏斗柄中上升的情况。) [方法2] 器材:透明平底塑料桶(深度10cm左右,口径宜大些,便于操作)一只、底面基本平整的木块(如象棋子、积木、保温瓶塞等)一个、筷子一根、水一杯。 制作小孔桶:取一铁扦在酒精灯上烧红,在塑料桶底面中央穿一小孔、孔径1cm左右,用砂纸将孔边磨平即成一小孔桶。 步骤: (1)将木块有意揿入水中,松手后木块很快浮起。 (2)将木块平整的一面朝下放入小孔桶中并遮住小孔,用筷子按住木块,向桶中倒水。移去筷子,可见木块不浮起。(这时小孔处有水向下滴,这是因为木块与桶的接触面之间不很密合)。 (3)用手指堵住小孔,木块立即上浮。 上述两例针对实际中物体的表面不可能绝对平滑这一事实,巧妙地利用“小孔渗漏”使水不在物体下面存留,从而使物体失去液体的向上的压力,也就失去了浮力,结果本应浮在水面上的
电子课程设计 ——基于Verilog的乒乓游戏设计电路 学院: 专业、班级: 姓名: 学号: 指导教师: 2014年12月
引言 可编程器件的广泛应用,为数字系统的设计带来了极大的灵活性。可编程器件可以通过软件编程对硬件的结构和工作方式进行重构,使得硬件的设计可以如同软件设计那样快捷方便。高速发展的FPGA、CPLD兼有串、并行工作方式和高速、高可靠性的特点,在电子系统设计中得到了广泛应用。 通常使用硬件描述语言 (Hardware Description Language,HDL)进行数字电子系统设计。目前应用广泛的硬件描述语言有:VHDL语言,Verilog HDL语言,AHDL语言。Verilog语言由于具有强大的行为描述能力和丰富的仿真语句从而成为系统设计领域最佳的硬件描述语言。 鉴于如上所述,本系统使用Verilog语言进行设计,采用自上向下的设计方法。利用Quartus II 9.1 进行Verilog 程序的编译与综合,然后用Modelism SE 6.0进行功能仿真和时序仿真,并使用EDA实验箱进行下载验证。
基于Verilog的乒乓游戏设计电路 一、设计任务与要求 任务: 设计一个乒乓球游戏机,模拟乒乓球比赛的基本过程和规则,并能裁判和自动计分。 要求如下: 1.使用乒乓球游戏机的甲乙双方在不同的位置罚球或击 球。 2.乒乓球的位置和移动方向可由发光二极管和依次点亮的 方向决定,为球的移动速度为一定值(我们设计中设为0.5秒移动一位)。使用者可按乒乓球的位置发出相应的动作,在其他时候击球视为犯规,给对方加一分;都犯规双方各加一分。二、总体框图 设计思路 根据乒乓球比赛的过程和规则,首先游戏开始,如果一方非正确击球则另一方加分,当分数大于11时获胜,游戏结束,系统设计流程图如图1所示。
2014-2015第一学期兵乓球社团活动 乒乓球社团教学工作总结 丰都中学:曾元兵 一、理论指路,科学训练。 由于是初中学生乒乓球训练,因此针对性、科学性训练就显得尤为重要,我们在训练时始终遵循乒乓球运动的发展规律,使工作者有章可循、有“法”可依,我们注意从小抓起,在全校对乒乓球感兴趣的同学都参与学打乒乓,通过一段时间,从中选几个较好的作重点辅导,这样即为他们个人乒乓球技术的提高,也为学校储备一份乒乓球队员的力量。 在每周三有限的时段训练中,安排适当的训练强度对学生的起步训练,特别重视基本步法和手法的训练,严格要求,打好基础,同时与身体全面素质的训练穿插结合,齐头并进。 二、育人为本,全面发展。 学校以德智体全面发展的乒乓队员为“表率”,在全校学生进行典型的示范、宣传,激发乒乓队员,学习先进赶有榜样。使队员们都能“以苦为乐,积极训练”,球艺不断提高。一年来,我校的乒乓队员在领导的关心与支持下,在乒乓球辅导员的辛勤培育下,在各级各类的比赛中获得了优异成绩。 三、训练要点: 1、了解中国国球的辉煌历史及相关知识,激发学生练习的兴趣。2、球感的训练。3、攻球的训练。4、推挡的训练。5、发球的训练。6、接发球的训练。7、搓球的训练。8、拉球的训练。9、脚步动作的训练等多方面。
在活动过程中以课堂教学为主,本学期通过每周三下午社团活动的训练,取得一定的成效,学生基本能掌握乒乓球的击球要领。由于学生基础比较差,有一些是一点球感也没有,水平是参次不齐的。但是我们本次学习只要求学生学习后有掌握基本的击球要领就可以了,这是进一步学习乒乓球的基础。在本学期,着重训练学生的发球训练、推挡训练、接发球训练和脚步动作的训练,从而激发学生的练习兴趣 在学习过程中,我们采取循序渐进的教学方法,让学生由练球感开始,由不会控制球到能熟练控制球,从不会击球到能按落点准确击球,从而形成学习乒乓球的教学模式。但是,学生接触乒乓球的时间不是很长,他们的水平较低、不是很平均,所以教学过程中仍然有很多不足之处,以后教学中我会从实际出发,讲解更详细、更透切,达到兵乓球社团活动的目的。 2014年12月31日
毕业论文开题报告(文科类) 论文题目伦敦奥运会乒乓球男子单打冠军张继科技战术分析 学生姓名张俊帅学号1011231034 专业体育教育 课题的目的意义:通过伦敦奥运会乒乓球男子单打决赛,张继科战胜王皓获得了男单冠军同时也成就了张继科职业生涯的大满贯。我们从中可以借鉴张继科的乒乓球技术、战术从而为今后我国乒乓球方面更上一层楼。张继科的乒乓球技术很有特点,其反手技术非常突出,在实战中,反手使用频率与得分率往往高于正手,快攻结合弧圈类打法,技战术全面,攻守平衡,特长突出的打法,在比赛中起到了主动的作用,这与中国传统以正手技术为主的打法有着鲜明的区别,为其他运动员的训练提高以及训练方向调整都起到借鉴作用。全面的分析冠军的技术战术,培养更多优秀运动员提供理论依据,是我国在乒乓球方面立于不败之地,继续保持霸主地位。 二、文献综述:中国乒乓球可谓是在世界上有着霸主地位,也是个大赛事必不可少的国家,比赛运动员的打法可谓是百花齐放百家争鸣,谢晓东(2012)在《第51届世乒赛男子单打前八强台内球处理技术分析》中,通过对前八强的比赛情况统计分析得知,张继科夺冠与其台内球处理有直接关系,其主动进攻台内球成功率达72.7%,他认为,台内球是乒乓球技战术的重要组成部分,在比赛中若能手链的应用其技术,合理有效的处理好台内球,那么就能破坏对方的进攻为自己主动上手和进攻创造有利战机。 张志荣《第30届奥运会乒乓球男子单打决赛张继科“前三板”技战术分析》中通过文献资料法、录像观察法、分段指标评估法、字母数字标记法、数理统计法等方法。他总结张继科发球落点较单一,主要以发短球为主,接发球要建立侧身以张守接发球为主的意识。我认为者应该加紧接发球的稳定性,和抢攻。 陈德林,王克承(2012)《张继科与王皓的接发球技战术比较分析》他得出结论张继科与王皓比赛中接发球以进攻性技术为主,控制性接发球技术为辅,但二者的使用率不同,王皓控制性技术的使用率高于张继科,而进攻性技术的使用率低于张继科,张继科在具体技术运用上排在前3位的分别为:反手拧,摆短,反手抢位。 刘国兵,(2012)《2012年奥运会中国乒乓球男队主要对手技战术分析及应对策略》使用文献资料法、数理统计法、分段指标评估法、录像观察法通过分析波尔、水谷隼、萨姆索诺夫技术水平强调发球和接球的多样性,以稳准为主,同时注意二四板和三五板的衔接,争取相持的主动性。 赵喜迎,(2010)《世界优秀男子乒乓球选手单打比赛中得分特征分析》通过文献资料法、录像观察法、数理统计法对世界优秀男子乒乓球选手30场比赛记录进行统计得出统计的比较仔细,数据比较好,但是不够注重接发球抢攻的意识。 综上所述,发球和接发球技术在乒乓球技术中非常重要。发球技术尤为重要,相持阶段中发球抢攻后的第一板衔接技术的好坏,直接影响着在相持阶段是处于被动还是主动,影响着相持阶段的得分率。除此之外,良好的心理素质也是相持阶段拿下关键一球的重要因素。因此本人欲对张继科在伦敦奥运会单打决赛中技战术的运用特点进行分析,旨在找出其优缺点,希望对乒乓球爱好者或者乒乓球方面的工作者在今后的训练中给予支持。
课程设计(论文) 课程名称:数字电子技术基础 题目:基于Multisim的乒乓球游戏机控制电路设计院(系): 专业班级: 姓名: 学号: 指导教师:
任务书 设计题目:基于Multisim乒乓球游戏机的控制设计电路 课题目的: 该乒乓球游戏机电路主要由3块组成:球台驱动电路,控制电路和计分电路组成。其中球台电路主要实现游戏者击球完毕后球的左右移动显示位置功能;控制电路实现游戏者A和B击球,裁判对系统初始化的功能;计分电路具有当A 或B击球有效时加分和当游戏者的分数累计超过10时报警通知裁判对系统初始化以便重新开始比赛计分功能。 课题主要内容与要求: 内容:本课题设计一个以8个二极管的依次被点亮代表球的移动位置双向选择开关J2,J3控制发球,击球信号,在Multisim软件上测试结果。 要求:1、熟悉Multisim软件 2、用8个发光二极管表示球,用俩个按钮分别表示AB俩个球员的球拍; 3、A,B各有一个数码管计分。 4、裁判有一个按钮,用来对系统初始化,每次得分后按下一次。
摘要 乒乓球游戏机通过十分巧妙地设计采用数字芯片实现乒乓球左右移动,选手击球得分,累计得分超10报警灯功能。该设计三个双向开关J1,J2,J3分别作为裁判和游戏者A,B,且选手可以译码显示器上直接读出自己的得分,具有操作简单,结构清晰的优点。 对与模电课题的研究离不开电路图,不过现在都在实行电子化,所以需要借助电子产品。Multisim软件就是一款画电路图的电子软件,在此对不太熟悉或未接触过Multisim软件的朋友简短的介绍下: Multisim是美国国家仪器(NI)有限公司推出的以Windows为基础的仿真工具,适用于板级的模拟/数字电路板的设计工作。它包含了电路原理图的图形输入、电路硬件描述语言输入方式,具有丰富的仿真分析能力。同时具备可以根据自己的需求制造出真正属于自己的仪器;所有的虚拟信号都可以通过计算机输出到实际的硬件电路上;所有硬件电路产生的结果都可以输回到计算机中进行处理和分析等特点。该乒乓球游戏机电路主要有3块电路:台球驱动电路,控制电路和计分电路组成。其中台球驱动电路主要实现游戏者击球完毕后球的左右移动显示位置功能;控制电路实现游戏者A和B击球,裁判对系统初始化的功能;积分电路具有当A和B击球有效时加分和当游戏者的分数累计超过10分时报警通知裁判对系统进行初始化以便重新开始比赛积分的功能。 关键词:游戏机控制电路系统初始化
学习乒乓球的心得体会 欧阳歌谷(2021.02.01) 一学期的乒乓球课就这样结束了,经过这段时间的学习,我收获了很多的东西,乒乓球的水平也有了 不小的进步,对于乒乓球的规则打发也有了初步的认识和理解。我们最初是学关于乒乓球的基本的规则。在接下的课中我们依次学习了发球,推挡球和正手攻球。 下面谈谈我对乒乓球的感想:首先,要想打好乒乓球必须有坚持不懈的精神,从我自身的经验来看, ,在打球的过程中可能会遇到不少的困难。比如说水平突然的下降或者停止不前,如果行政放弃的话就是 前功尽弃了,必须咬咬牙齿矜持训练下去,到达一定的程度,你会发现自己的水平会不知不觉的有所上升 。 其次,在一开始打乒乓球的时候必须保证姿势动作标准,如果一开始打乒乓球时的姿势不标准甚至是 不正确的,那样会限制你以后的发展,只有姿势正确了才能使进退从容,攻防协调。 另外,一个很容易被忽视也很重要的技术是步法,脚步的移动
对于打乒乓球来说相当于地基,只有步 法到位了,才能从分发挥上身以及手臂的技术,如果步法不到位,其他技术再熟练那也是徒劳的,因为你 不可能将其他动作充分的发挥出来,从而导致该打好的球结果没打好。 乒乓球运动讲究动作的协调,他需要全身各部位的结合,从脚步到腿部再到腰部最后经肩到胳膊再到手腕 ,每一个动作都需要全身各部位的配合才能完成,要在短暂的时间完成这一系列复杂的动作必须得多加练 习,最好是找一些技术较好的同学相互比赛,在与他切磋训练的时候将会的到意想不到的进步。有时候他 们轻描淡写的指点就有可能让你豁然开朗,尤其是关键的动作和技术要领。因此在单独训练的时候,尽可 能的去找技术较好的人训练。 想成为一名乒乓球的高手需要恒心、毅力,需要日积月累、循序渐进。有人说,如果你没有上百万次 的触球机会,就很难成为一名佼佼者。做任何事情都是这样,没有不懈的坚持就不会有成功的喜悦。当然 光练习是不够的,还要不断思考,总结经验教训。即使失败,也