第7章 TMS320LF2407事件管理器模块.doc
- 格式:doc
- 大小:68.00 KB
- 文档页数:8
3.6 等待状态发生器如果采用慢速的RAM、外设芯片,须考虑与C240X芯片的速度匹配问题,需使用READY信号、片外延迟电路或内部等待状态产生器来添加等待状态。
3.6.1 用READY信号产生等待状态外设通过使READY信号变为高电平,表示已准备好。
若外设未准备好,则需保持READY为低。
READY为低,LF240X等待一个CLKOUT周期。
再次检查READY,若READY信号没有被使用,LF240X将在外部访问时把READY 拉高。
READY脚可用来产生任意数目的等待状态。
3.6.2 用等待状态发生器产生等待状态为控制等待状态发生器,必须写映射IO空间的FFFFh等待状态控制寄存器。
格式如下:位15∼11:保留位10∼9: BVIS,总线可见模式,提供了跟踪内部总线活动的方式。
00-总线可见模式关(降低功耗和噪声)01-总线可见模式开;10-数据到地址总线输出到外部地址总线;数据到数据总线输出到外部数据总线;11-程序到地址总线输出到外部地址总线;数据到数据总线输出到外部数据总线。
位8∼6:决定了等待状态(0∼7)的数目。
用于读片外I/O空间。
复位为111,为片外I/O空间的读写设定7个等待状态。
位5∼3:决定了等待状态(0∼7)的数目。
用于读片外数据空间。
复位为111,为片外数据空间的读写设定7个等待状态。
位2∼0:决定程序空间等待状态(0∼7)的数目。
复位为111,设定程序空间7个等待状态。
第4章时钟和低功耗模式片内集成有PLL(锁相环)电路。
外接的基准晶体+PLL(锁相环)电路共同组成系统时钟电路。
有关引脚:XTAL1/CLKIN:外接的基准晶体到片内振荡器输入引脚;如使用外部振荡器,外部振荡器的输出必须接该脚。
XTAL2:片内PLL振荡器输出引脚;CLKOUT/IOPE0:该脚可作为时钟输出或通用IO脚;可用来输出CPU时钟或看门狗定时器时钟;由系统控制状态寄存器(SCSR1)中的位14决定。
1.引言短路器是一种量大面广的重要的低压配电电器,其作用是分配电能和保护电器配电网络和工业设备免受短路、过载、欠电压和接地故障电流的破坏。
随着计算机技术、微电子技术、数字处理技术的发展,断路器逐渐趋向自动化、智能化、模块化、小型化。
为了使供电系统中的多台智能型断路器实现联网通信、集中监控,开发适应多种现场总线的科通信低压电器已经成为一个重要的发展趋势。
目前,我国也正致力于开发国产第四代断路器——智能化、可通信断路器,其主要特征是在智能化的基础上具备现场总线的可通信特点。
DSP(Digital Signal Processors)是一种独特的微处理器,是以数字信号来处理大量信息的器件。
其工作原理是接收模拟信号,转换为0或1的数字信号,再对数字信号进行修改、删除、强化,并在其他系统芯片中把数字数据解译回模拟数据或实际环境格式。
它不仅具有可编程性,而且其实时运行速度可达每秒数以千万条复杂指令程序,远远超过通用微处理器,是数字化电子世界中日益重要的电脑芯片。
它的强大数据处理能力和高运行速度,是最值得称道的两大特色。
本文介绍基于TMS320LF2407DSP的智能断路器的CAN通信设计,可实现远距离遥控、遥调、遥测、遥讯等“四遥”功能,并能显示、记忆、监控。
TMS320C2XX是继TMS320C2X和TMS320C5X之后出现的一种低价格、高性能定点DSP芯片,主要包括TMS320C20X、TMS320C24X两个子系列。
而DSPTMS320LF240x是TMS320C2000家族中相对较新的,功能强大的芯片。
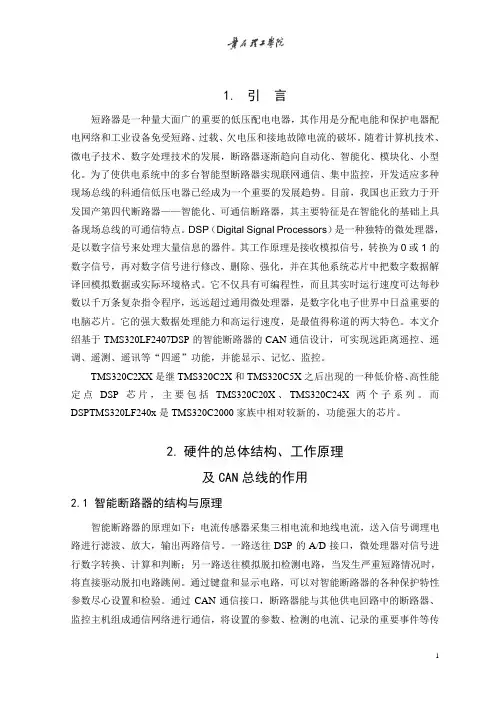
2.硬件的总体结构、工作原理及CAN总线的作用2.1 智能断路器的结构与原理智能断路器的原理如下:电流传感器采集三相电流和地线电流,送入信号调理电路进行滤波、放大,输出两路信号。
一路送往DSP的A/D接口,微处理器对信号进行数字转换、计算和判断;另一路送往模拟脱扣检测电路,当发生严重短路情况时,将直接驱动脱扣电路跳闸。
文章编号1006-2475(2004)03-0089-03收稿日期:2003-04-26作者简介:单晶(1979-),男,天津人,河北工业大学硕士研究生,研究方向:控制理论与控制工程。
TMS320LF2407在电机控制中的应用单 晶,安连祥,董春霞,晏俊秋(河北工业大学,天津 300130)摘要:介绍了数字电机微控制器TMS320LF2407的结构与特点,对竞争产品进行了分析和比较,并讨论了TMS320LF2407在交流电机控制中的作用。
关键词:数字信号处理器;电机控制;数字电机微控制器中图分类号:TP23 文献标识码:AApplication of TMS 320LF2407in Motor ControlSHAN Jing,AN Lian -xiang,DONG Chun -xia,YAN Jun -qiu(Hebei Univ.of Technology,Tianjin 300130,China)Abstract:T his article introduces the configuration and characteristics of mi nitype controller of digital electromotor ,analyses its competitive adversaries,and discusses i ts function in the control of AC electromotor.Key words:di gital signal processor;electromotor control;minitype controller of digital electromotor0 引 言电气传动系统由控制、功率驱动和电动机三大要素组成。
调速系统可分为直流调速和交流调速两大类,后者又分为异步调速和同步调速。
在上述调速系统中,直流调速虽然历史悠久、技术成熟,并且在不断加以完善(如全数字化),但由于有电刷和机械换向器等固有缺陷,必将为交流调速所取代。
目录摘要 (2)1设计任务及要求 (3)1.1设计任务 (3)1.2设计要求 (3)2系统结构设计 (4)2.1设计原理及框图 (4)2.2设计芯片说明 (4)3硬件设计 (9)3.1电源设计 (9)3.2锁相环电路设计 (9)3.3晶体振荡电路设计 (10)3.4 JTAG电路设计 (10)3.5指示灯电路设计 (11)3.6复位电路设计 (12)3.7 RAM电路设计 (12)3.8 滤波电路设计 (13)4仿真调试过程 (14)5总结 (17)附录一原理图 (19)附录二 PCB图 (20)附录三 PCB剪切图 (21)摘要在人们生活当中,DSP可谓无处不在,例如手机,电视机,数码相机,MP3等等都有DSP的存在。
DSP 已经成为通信、计算机和消费类电子产品等领域的基础器件。
因此,只有理论的学习是不够的,设计一个DSP最小系统,掌握这门重要技术,才能更深刻地理解和掌握DSP,为今后进行高精度、高性能的电子设计打下基础。
DSP 芯片是模拟信号变换成数字信号以后进行高速实时处理的专用微处理器,其处理速度比最快的CPU还快10-50 倍,具有处理速度高、功能强、性能价格比好以及速度功耗比高等特点,被广泛应用于具有实时处理要求的场合。
本次课设的目的是掌握DSP的特点和开发应用技巧,通过具体的电路设计和调试,领会DSP系统的设计要领,从而达到理论到实践的转变,从本质上提高自己的综合能力,以此实现本设计的目的。
此次设计的最小系统主要包括TMS320LF2407A、RAM、电源芯片等。
关键词:DSP系统电路设计电路调试最小系统基于TMS320LF2407A的最小系统设计1设计任务及要求1.1设计任务基于TMS320LF2407A的最小系统:技术数据:设计基于TMS320LF2407A的最小系统,包括电源供电电路、时钟振荡电路、PLL滤波电路、RAM存储器扩展电路、MAX232串行通信电路、IO口驱动发光管电路等。
TMS320LF2407A DSP与图形点阵式LCM的接口设计范邹【摘要】液晶显示模块(LCM)相对于数字信号处理器(DSP),属于慢速设备,两者之间接口的速度匹配非常重要;另外低功耗DSP一般为3.3 V电平芯片,例如TMS320LF2407A,而LCD一般为5 V电平器件,他们之间的接口必须进行电平转换.以图形点阵式液晶显示模块MGLS240128TA为例,介绍内置T6963C控制器的LCM与DS PTMS320LF2407A的接口软、硬件设计方案,并重点对速度匹配、电平转换和字符、汉字显示等问题进行论述,最后给出部分显示程序流程图.【期刊名称】《现代电子技术》【年(卷),期】2006(029)022【总页数】4页(P124-127)【关键词】数字信号处理器;液晶显示模块;接口设计;速度匹配;电平转换【作者】范邹【作者单位】海军驻九江地区军事代表室,江西,九江,332007【正文语种】中文【中图分类】TP3111 引言在自动化仪表、语音、图像处理、通信系统以及各种数字控制系统中,选用DSP(数字信号处理器)作为核心处理单元,能够使得系统实时性和准确性增强,智能化程度提高,功能集成度高,也提高了系统的工作可靠性。
TMS320LF2407A DSP是TI公司推出的适合于数字控制应用的一款DSP,其处理速度最高为每秒40 M条指令,而且他集成了FLASH闪存、高速10位A/D转换器、定时器、捕获单元以及SCI,SPI和高性能CAN通信模块,具有较高的性价比。
另一方面,液晶显示模块(LCM) 具有功耗低、寿命长、接口方便等优点,被广泛应用于各种便携式系统和工业控制系统的显示,形成极好的人机交互界面,保证了系统的实时性和先进性。
本文介绍了内置T6963C控制器的图形点阵式液晶显示模块MGLS240128TA与TMS320LF 2407A DSP的接口设计软硬件实现。
高速的DSP与相对低速的液晶显示模块的接口设计涉及到很多问题,文中重点对电平转换、速度匹配以及液晶的显示控制等进行论述。
基于DSP芯片TMS320LF2407的人机界面设计笔者采用TMS320LF2407 作为系统的控制芯片,通过选择合适的液晶显示模块在3V 电平构建了一个低功耗的中文人机界面。
此中文人机显示界面是以TMS320LF2407 为核心的运动控制系统中的重要组成部分。
一、TMS320LF2407DSPTMS320LF2407 是德州仪器公司(TI)推出的16 位定点DSP。
它具有TMS320 系列DSP 的基本功能,还具有以下一些特点:1、用高性能静态CMOS 技术,使得供电电压降为3.3V,减少了控制器的功耗。
2、内有高达32K 乘以16 位的Flash 程序存储器,高达2.5K 乘以16 位的数据/程序RAM,544 乘以16 位双端口RAM(DARAM),2K 乘以16 位的单口RAM(SARAM)。
3、2 个事件管理模块EVA 和EAB,事件管理模块适用于控制交流感应电机、无刷直流电机、开关磁阻电机、步进电机、多级电机和逆变器。
4、可扩展的外部存储器总共192K 乘以16 位,其中程序存储器空间、数据存储器空间、I/O 寻址空间各为64K 乘以16 位。
5、内有看门狗定时器(WDT)、10 位ADC 转换器、控制器区域网模块CAN2.0 B、串行通信接口模块(SCI)、16 位串行外部设备接口模块(SPI)、基于锁相环的时钟发生器。
6、5 个外部中断(两个电机驱动保护、复位和两个可屏蔽中断);3 种低功耗电源管理模式,能独立地将外设器件转入低功耗工作模式。
此外,该芯片有多达41 个可单独编程或复用的通用I/O 脚(GPIO),用户可根据自己的需求进行软件设置,使之在应用中具有极大的灵活性。
概括来说,TMS320LF2407 具有极低的功耗、强大的处理能力、丰富的片上外围模块、方便高效的开发方式。
二、液晶显示模块与接口电路为实现友好的中文人机显示界面,液晶模块选用信利公司的MG-12232。
该模块的供电电压典型值为3V,工作电流典型值为0.3μA,其显示范围为122 乘以32 点阵。
基于TMS320LF2407 DSP控制器语音模块的设计摘要:本文着重介绍了DSP芯片SPI同步串行接口及SPI与语音转换芯片AD50通信方式,给出了硬件电路设计。
针对AD50特点,软件设计时通过DSPSPI口对其进行初始化配置,使其正常工作。
DSP在内部对语音信号予以处理并通过AD50输出。
关键字:数字信号处理器同步串行接口语音模块AD50初始化Design of Voice Module Based on TMS320LF2407 DSPControllerAbstract:This article focuses on the DSP chip SPI synchronous serial interface and the communication way between SPI and Speech communication chip AD50, it gives hardware design. For thefeatures of AD50, when we design software, the system will work properly by initializingDSP’s SPI. The voice signals will be processed in DSP internal and outputted through theAD50.Keywords: DSP Serial Peripheral Interface Voice Module AD50 Initialization1、引言随着信息技术和计算机技术飞速发展,DSP技术也正以日新月异速度应用到国民经济各个领域。
TMS320LF240X系列DSP是美国德州仪器(TI)公司推出一款16位定点数字信号处理器,它采用程序总线、数据总线分别独立并具有多条总线哈佛结构体系,其数据和程序有各自独立存储空间,这样结构使数据吞吐率有很大提高;芯片内部包含多个处理单元;16×16位硬件乘法器;广泛采用深度流水线技术,以及特有DSP指令,使得取址、译码和处理可同时进行,从而减少了指令执行时间,增强了DSP处理能力;具有强大内部事件管理器、10位A/D采样功能、I/O端口等丰富外设接口。
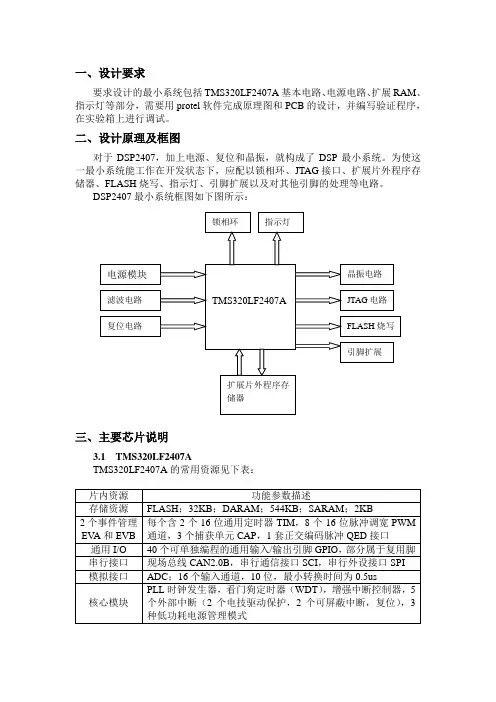
一、设计要求要求设计的最小系统包括TMS320LF2407A基本电路、电源电路、扩展RAM、指示灯等部分,需要用protel软件完成原理图和PCB的设计,并编写验证程序,在实验箱上进行调试。
二、设计原理及框图对于DSP2407,加上电源、复位和晶振,就构成了DSP最小系统。
为使这一最小系统能工作在开发状态下,应配以锁相环、JTAG接口、扩展片外程序存储器、FLASH烧写、指示灯、引脚扩展以及对其他引脚的处理等电路。
DSP2407最小系统框图如下图所示:三、主要芯片说明3.1 TMS320LF2407ATMS320LF2407A的常用资源见下表:3.2 TPS7333QTPS7333Q是TI公司生产的一款电压转换芯片,能将5V电压转换成3.3V,其特点如下:1.TPS7333Q克服了常规LDO稳压器的弊端,它具有非常低的静态电流,即使对于变化较大的负载,静态电流可以保持稳定2.具有关断特性3.具有输入和输出电容的选择3.3 CY7C1021选用的RAM型号为CY7C1021,64k*16位大小。
其高速转换时间:8、10、12、15ns,CMOS低功耗管理,TTL可共存界面,由3.3V供电,完全静态管理:无时钟或刷新要求,三种输出状态,高位、低位数据控制3.4 MAX811MAX811是一款四管脚微处理器复位芯片,用于监控微控制器和其他逻辑系统的电源电压,带有手动复位输入低电平复位芯片,支持手动复位功能,当MR引脚持续存在180ms的低电平,芯片的复位输出即会产生复位信号。
3.5 74HC0874HC08是4-2输入与门,相当于四个两输入与门。
其逻辑图如下:引脚图为四、设计过程4.1 电源电路电源电路的选择是系统设计的一个重要的部分,设计好坏对系统的影响最大。
这里使用TI公司的TPS7333Q来设计电源供电电路。
电源插孔J1 标识为内正外负,5V 稳压直流电源输入。
FUSE 为自恢复保险;7333 电源转换芯片作为5V 转3.3V 的高性能稳压芯片。
C2000 DSP实验箱实验指导用书1 概述1.1 TMS320LF2407A简介TMS320LF2407A芯片作为是TI公司TMS320C2000系列中的一种16位定点DSP芯片,是目前应用最为广泛的芯片。
它为C2xxCPU功能强大的TMS320 DSP结构设计提供了低成本、低功耗、高性能的处理能力,对电机的数字化控制非常有用。
同时,几种先进的外设被集成到该芯片内,形成了真正意义上的数字控制器。
TMS320LF2407A的主要特点为:☐采用了高性能静态CMOS技术,使得供电电压降为3.3V,减少了控制器的功耗。
最高40MIPS的执行速度使得指令周期缩短为25ns,从而提高了控制器的实时控制能力☐片内有高达32K字的FLASH程序存储器,数据存储器包含2K字的SARAM和544个字的DARAM☐可扩展的外部存储器总共有192K字:64K字程序存储器;64K字数据存储器;64K 字I/O寻址空间☐片内集成有两个事件管理器模块EVA和EVB,每个事件管理器包括:两个16位通用定时器(GP)、三个比较单元、三个捕获单元以及一个正交编码脉冲电路☐片内集成有模数转换模块(ADC),该模块是内置采样和保持(S/H)的10位精度的模式转换器,共有16个模拟输入通道(ADCIN0~ADCIN15),最小A/D转换时间是375ns☐控制器局域网(CAN)2.0B模块,该模块是一个完全的CAN控制器,完全支持CAN2.0B协议,有六个邮箱可用于发送接收数据☐片内集成有正交编码脉冲(QEP)电路可用于检测电机的角位移和转向☐40个独立可编程的双向通用I/O口☐两个串行通讯口:SPI和SCI☐看门狗定时器模块(WDT)和电源驱动保护电路,以提高系统的安全可靠性1.2 DSP应用软件的开发流程DSP软件的开发流程如图1所示,涉及C编译器、汇编器、链接器等软件开发工具(图中的灰色部分)。
如果只是开发一个汇编程序,则不需要用到C编译器。
用TMS320LF2407实现无刷直流电机的变结构控制本文介绍了无刷直流电机的一种变结构控制方法。
采用TMS320LF2407芯片,很方便地实现了电机在无刷方式和他控式同步方式之间的切换,发挥了两种方式的优点,有较好的动态和稳态性能关键字:无刷直流电机TMS320LF2407 无刷方式同步方式1概述无刷直流电机组成的伺服系统具有转速平滑、响应快、易于控制等特点,因此在搜索雷达这一类伺服系统中得到越来越多的广泛采用。
但按照常规的控制方法,其转速直接与电压相关,易受电源波动和负载波动的影响。
本文采用的方法是运行于无刷方式下的电机在接近期望转速时切入同步状态,使无刷方式下优良的动态性能和同步方式下很高的转速精度都得以实现。
2TMS320LF2407芯片简述TMS320LF2407是美国TI公司推出的一种针对于电机数字化控制的DSP芯片。
与此前24x芯片相比,更适合在快速性和精度要求较高的场合作为电机控制器。
为降低功耗,TMS320LF2407采用3.3V直流电压供电(编程电压为5V),并且有专门的控制寄存器对各个外围部件的时钟进行使能操作。
CPU时钟的典型值为30MHz。
片内有多达32K字的FLASH存储器,544字节的DARAM和2K的SARAM。
有两个功能相同的事件管理模块EV A和EVB,每个模块均有两个16位定时器、3个捕捉单元、16通道10位A/D、正交编码脉冲电路以及8个PWM输出通道。
3无刷方式时的控制策略无刷直流电机的电磁转矩表达式和普通直流电机相同,所以控制逆变器输出方波电流的幅值即可控制无刷直流电机的转矩。
在本文中采用霍尔元件制成的磁链式转子位置检测器。
该传感器输出信号为三相互差120°,宽度为180°电角度的方波。
这样,在控制时无刷直流电机就可看作一台普通的直流电机,可以简单地将这种工作方式称为无刷方式。
在无刷方式下,根据各个管子的导通时间不同,又可细分为两两导通方式和三三导通方式。
第一章TMS320LF2407 DSP 介绍1-31.0 TMS320x240x 系列DSP 概述 11.1 TMS320LF2407 DSP 性能特点 11.2 TMS320LF2407 DSP 主要应用 21.3 TMS320LF2407 DSP 管脚封装图 3第二章TMS320LF2407 芯片评估模块介绍4-52.0 TMS320LF2407EVM 概要 42.1 TMS320LF2407EVM 主要特征 42.2 TMS320LF2407EVM 功能概要 5第三章TMS320LF2407的操作6-24 3.0 TMS320LF2407EVM的操作 63.1 TMS320LF2407EVM板 63.1.1 电源接口 63.2 TMS320LF2407EVM 存储接口 63.2.1 程序存储器73.2.2 数据存储器83.2.3 I/O 空间93.3 用户开关和发光二极管指示灯93.4 晶振选择93.5 数模转换器103.6 扩展总线103.6.1 TMS320LM2407EVM扩展接口103.6.1.1 扩展I/O 接口113.6.1.2 扩展模拟接口123.6.1.3 扩展地址和数据接口133.6.1.4 扩展控制接口143.7 JTAG 接口153.8 SPI 数据接口153.9 片上异步串行接口153.10 CAN 接口163.10.1 CAN 正配插座163.11 EVM320LF2407跳线173.11.1 JP1 跳线,使能CAN关断183.11.2 JP2 跳线,CAN输入选择183.11.3 JP3 跳线,串行ROM写保护选择193.11.4 JP4 跳线,SPI端口通道选择193.11.5 JP5 跳线,使能快速编制程序1923.11.6 JP6 跳线,MP/MC内部闪存ROM 使能193.11.7 JP7 跳线,模拟电源输入选择203.11.8 JP8 跳线,VREF HI选择203.11.9 JP9 跳线,VREF LO选择203.11.10 JP10 跳线,面DTR的主复位使能203.11.11 JP11 到BIO-/IOPCI 的主复位能213.11.12 JP12 到SCIRXD/IOPA1 的RXD 使能213.11.13 JP13 跳线,晶振源选择213.11.14 JP14 跳线,DTS/RTS选择223.11.15 JP15 跳线,SPI/SCI引导器选择223.11.16 JP16 跳线,引导器选择223.12 LED 状态指示灯223.13 用户可编程LED 233.14 复位233.15 复位开关233.16 用户可读开关233.17 开关243.18 测试点24第四章系统安装25-264.0 系统组成254.1 仿真器与评估板的连接254.2 仿真器与评估板的供电25第五章TMS320LF2407 评估板性能测试程序27-295.0 测试程序概述275.1 测试程序结构组成275.2 测试程序运行过程285.2.1 数据空间RAM检测285.2.2 程序代码空间检测285.2.3 片上串行异步通讯检测285.2.4 ADC-DAC 联合检测285.2.5 双向数字I/O检测295.2.6 通用I/O 口和评估板LED检测295.2.7 评估板并排手动开关检测295.2.8 结束29第六章系统脱机工作30 6.0 条件保证306.1 系统连接3036.2 操作步骤30 6.3 脱机工作304第一章TMS320LF2407 DSP 介绍本章介绍的是TMS320LF2407 DSP的性能特点、主要应用及管脚图。
高性能数字信号处理器TMS320LF2407A及应用数字信号处理器(DSP)已经发展了20多年,最初仅在信号处理领域内应用。
近年来,随着半导体技术的发展,其高速运算能力使很多复杂的控制算法和功能得以实现,同时将实时处理能力和控制器的外设功能集于一身,在控制领域内也得到很好的应用。
数字控制系统克服了模拟控制系统电路功能单一、控制精度不高的缺点,它抗干扰能力强,可靠性高,可实现复杂控制,增强了控制的灵活性。
TMS320LF2407A 是美国TI公司推出的新型高性能16位定点数字信号处理器,它专门为数字控制设计,集DSP的高速信号处理能力及适用于控制的优化外围电路于一体,在数字控制系统中得以广泛应用[1]。
本文介绍其体系结构、功能特性及其在控制领域中的应用,为数字控制系统的设计提供参考。
2 体系结构和功能特性2.1 系统组成TMS320LF2407A系统组成包括:40MHz、40MIPS的低电压3.3V CPU、片内存储器、事件管理器模块、片内集成外围设备[2]。
其体系结构框图如图1所示。
2.2 CPU及总线结构TMS320LF2407A 的CPU是基于TMS320C2XX的16位定点低功耗内核。
体系结构采用四级流水线技术加快程序的执行,可在一个处理周期内完成乘法、加法和移位运算。
其中央算术逻辑单元(CALU)是一个独立的算术单元,它包括一个32位算术逻辑单元(ALU)、一个32位累加器、一个16×16位乘法器(MUL)和一个16位桶形移位器,同时乘法器和累加器内部各包含一个输出移位器。
完全独立于CALU的辅助寄存器单元(ARAU)包含八个16位辅助寄存器,其主要功能是在CALU操作的同时执行八个辅助寄存器(AR7至AR0)上的算术运算。
两个状态寄存器ST0 和ST1用于实现CPU各种状态的保存。
TMS320LF2407A 采用增强的哈佛结构,芯片内部具有六条16位总线,即程序地址总线(PAB)、数据读地址总线(DRAB)、数据写地址总线(DWAB)、程序读总线(PRDB)、数据读总线(DRDB)、数据写总线(DWEB),其程序存储器总线和数据存储器总线相互独立,支持并行的程序和操作数寻址,因此CPU的读/写可在同一周期内进行,这种高速运算能力使自适应控制、卡尔曼滤波、神经网络、遗传算法等复杂控制算法得以实现。
第7章事件管理器模块(EV)例7.1给出了通用定时器1在连续增计数模式下的初始化例程。
例7.1连续增计数模式的初始化例程LDP #DP_EV A ;指向7400h~7480h单元SPLK #41H,GPTCONA ;TCOMPOE=1 允许定时器比较输出SPLK #5H,T1PR ;设置周期寄存器SPLK #3H,T1CMPR ;设置比较寄存器SPLK #0H,T1CNT ;设置计数寄存器SPLK #0174EH,T1CON ;TMODE=10 连续增计数模式,TPS=111 预分频为128;TENABLE=1 定时器计数使能,TCLKS=00 内部时钟;TECMPR=1 定时器1比较使能,SELT1PR=03 定向增/减计数模式例7.2定向增/减计数模式的初始化例程LDP #DP_EV A ;指向7400h~7480h单元SPLK #41H,GPTCONA ;TCOMPOE=1 允许定时器比较输出SPLK #5H,T1PR ;设置周期寄存器SPLK #3H,T1CMPR ;设置比较寄存器SPLK #0H,T1CNT ;设置计数寄存器SPLK #01F4EH,T1CON ;TMODE=11 定向增/减计数模式,TPS=111;预分频为128;TENABLE=1 定时器计数使能,TCLKS=0 内部时钟;TECMPR=1 定时器1比较使能,SELT1PR=04 连续增/减计数模式例7.3连续增/减计数模式的初始化例程LDP #DP_EV A ;指向7400h~7480h单元SPLK #41H,GPTCONA ;TCOMPOE=1 允许定时器比较输出SPLK #5H,T1PR ;设置周期寄存器SPLK #3H,T1CMPR ;设置比较寄存器SPLK #0H,T1CNT ;设置计数寄存器SPLK #0F4EH,T1CON ;TMODE=01 连续增/减计数模式,TPS=111;预分频为128;TENABLE=1 定时器计数使能,TCLKS=00 内部时钟;TECMPR=1 定时器1比较使能,SELT1PR=07.2.7 通用定时器的中断实现.include "F2407REGS.H" ;引用头部文件.def _c_int0(1)建立中断向量表.sect ".vectors" ;定义主向量段RSVECT B _c_int0 ;PM 0 复位向量 1 INT1 B PHANTOM ;PM 2 中断优先级1 4 INT2 B GISR2 ;PM 4 中断优先级2 5 INT3 B PHANTOM ;PM 6 中断优先级3 6 INT4 B PHANTOM ;PM 8 中断优先级4 7 INT5 B PHANTOM ;PM A 中断优先级5 8 INT6 B PHANTOM ;PM C 中断优先级6 9 RESERVED B PHANTOM ;PM E 模拟量输入中断(保留) 10 SW_INT8 B PHANTOM ;PM 10 用户定义软件中断—…SW_INT31 B PHANTOM ;PM 3E 用户定义软件中断—;中断子向量入口定义pvecs.sect ".pvecs" ;定义子向量段PVECTORS B PHANTOM ;保留向量地址偏移量-0000hB PHANTOM ;保留向量地址偏移量-0001h…B PHANTOM ;保留向量地址偏移量-0026hB T1PINT_ISR ;保留向量地址偏移量-0027h T1PINT中断B PHANTOM ;保留向量地址偏移量-0028h…B PHANTOM ;保留向量地址偏移量-0041h(2)主程序.text_c_int0SETC INTMCLRC SXMCLRC OVMCLRC CNF ;B0区被配置为数据空间LDP #0E0H ;指向7000h~7080h区SPLK #81FEH,SCSR1 ;时钟4倍频,CLKIN=6 M,CLKOUT=24 MSPLK #0E8H,WDCR ;不使能WDTLDP #0SPLK #02H,IMR ;使能中断优先级INT2SPLK #0FFFFh,IFR ;清中断标志LDP #DP_EV A ;指向7400h~7480h区SPLK #80H,EV AIMRA ;使能T1PINT 中断SPLK #0FFFFh,EV AIFRA ;清EV A中断标志SPLK #0,GPTCONASPLK #177H,T1PR ;使定时器每1ms产生一次中断SPLK #0,T1CNTSPLK #0164CH,T1CON ;TMODE=10 连续增计数模式,TPS=110 预分频为64;TENABLE=1 定时器计数使能,TCLKS=00;内部时钟;TECMPR=1 定时器1比较使能,SELT1PR=0 CLRC INTM ;开总中断W AIT:NOPB W AIT(3)中断程序GISR2:;优先级INT2中断入口保护现场LDP #0E0HLACC PIVR,1 ;读取外设中断向量寄存器(PIVR),并左移一位ADD #PVECTORS ;加上外设中断入口地址BACC ;跳到相应的中断服务子程序T1PINT_ISR:;通用定时器1中断入口LDP #DP_EV ASPLK #0,T1CNTGISR2_RET:;中断返回恢复现场CLRC INTM ;开总中断,因为一进中断就自动关闭总中断RET(3)假中断程序PHANTOMKICK_DOG ;复位看门狗RETEND7.4.4 PWM波形产生举例.include "F2407REGS.H" ;引用头部文件.def _c_int0;(1)建立中断向量表.sect ".vectors" ;定义主向量段RSVECT B _c_int0 ;PM 0 复位向量 1INT1 B PHANTOM ;PM 2 中断优先级1 4INT2 B GISR2 ;PM 4 中断优先级2 5INT3 B PHANTOM ;PM 6 中断优先级3 6INT4 B PHANTOM ;PM 8 中断优先级4 7INT5 B PHANTOM ;PM A 中断优先级5 8INT6 B PHANTOM ;PM C 中断优先级6 9 RESERVED B PHANTOM ;PM E (保留位) 10SW_INT8 B PHANTOM ;PM 10 用户定义软件中断—…SW_INT31 B PHANTOM ;PM 3E 用户定义软件中断—;中断子向量入口定义pvecs.sect ".pvecs" ;定义子向量段PVECTORS B PHANTOM ;保留向量地址偏移量–0000hB PHANTOM ;保留向量地址偏移量–0001h…B PHANTOM ;保留向量地址偏移量-002EhB T3GP_ISR ;保留向量地址偏移量-002Fh T3PINT中断B PHANTOM ;保留向量地址偏移量–0030h…B PHANTOM ;保留向量地址偏移量–0041h;(2)主程序.text_c_int0CALL SYSINIT ;系统初始化程序CALL PWM_INIT ;EVB模块PWM初始化程序W AITNOPB W AIT;(3)系统初始化程序SYSINIT:SETC INTMCLRC SXMCLRC OVMCLRC CNF ;B0区被配置为数据空间LDP #0E0H ;指向7000h~7080h区SPLK #81FEH,SCSR1 ;时钟4倍频,CLKIN=6 M,CLKOUT=24 MSPLK #0E8H,WDCR ;不使能WDTLDP #0SPLK #0002H,IMR ;使能中断第2级INT2SPLK #0FFFFH,IFR ;清全部中断标志RET;(4)EVB模块的PWM初始化程序PWM_INIT:LDP #DP_PF2 ;指向7080h~7100h区LACL MCRCOR #007EH ;IOPE[1~6]被配置为基本功能方式:PWM[7~12]SACL MCRCLDP #DP_EVB ;指向7500h~7580h区SPLK #0FFFFH,EVBIFRA ;清EVB 全部中断标志SPLK #0666H,ACTRB ;PWM12,10,8 低有效,PWM11,9,7 高有效SPLK #00H,DBTCONB ;不使能死区控制SPLK #10H,CMPR4 ;设置比较初值PWM7高电平占50/60,;低电平占10/60SPLK #20H,CMPR5 ;设置PWM9,10的比较寄存器SPLK #30H,CMPR6 ;设置PWM11,12的比较寄存器SPLK #60H,T3PR ;设置定时器3周期寄存器,;即PWM周期为60个CPU时钟周期SPLK #0A600H,COMCONB ;使能比较操作SPLK #0,T3CNTSPLK #41H,GPTCONB ;TCOMPOE=1,T3PIN=01SPLK #080H,EVBIMRA ;通用定时器3使能SPLK #0174EH,T3CON ;TMODE=10 连续增计数模式,TPS=111 预分频为128;TENABLE=1 定时器计数使能,TCLKS=00;内部时钟;TECMPR=1 定时器3比较使能,SELT3PR=0 CLRC INTM ;开总中断RET;(5)定时器3中断程序GISR2:;优先级INT2中断入口保护现场LDP #0E0HLACC PIVR,1 ;读取外设中断向量寄存器(PIVR),并左移一位ADD #PVECTORS ;加上外设中断入口地址BACC ;跳到相应的中断服务子程序T3GP_ISR:;通用定时器3中断入口LDP #DP_EVBSPLK #0,T3CNTGISR2_RET:;中断返回恢复现场CLRC INTM ;开总中断,因为一进中断就自动关闭总中断RET;(6)假中断程序PHANTOMKICK_DOG ;复位看门狗RETEND7.5.3 捕获单元应用举例CAP4TEMP .usect ".data0",1 ;CAP4 临时寄存器.include "F2407REGS.H" ;引用头部文件.def _c_int0;(1)建立中断向量表.sect ".vectors" ;定义主向量段RSVECT B _c_int0 ;PM 0 复位向量 1INT1 B PHANTOM ;PM 2 中断优先级1 4INT2 B PHANTOM ;PM 4 中断优先级2 5INT3 B PHANTOM ;PM 6 中断优先级3 6INT4 B GISR4 ;PM 8 中断优先级4 7INT5 B PHANTOM ;PM A 中断优先级5 8INT6 B PHANTOM ;PM C 中断优先级6 9 RESERVED B PHANTOM ;PM E (保留位) 10SW_INT8 B PHANTOM ;PM 10 用户定义软件中断—…SW_INT31 B PHANTOM ;PM 3E 用户定义软件中断—;中断子向量入口定义pvecs.sect ".pvecs" ;定义子向量段PVECTORS B PHANTOM ;保留向量地址偏移量-0000hB PHANTOM ;保留向量地址偏移量-0001h…B PHANTOM ;保留向量地址偏移量-0035hB CAP4_ISR ;保留向量地址偏移量-0036h CAP4中断B PHANTOM ;保留向量地址偏移量-0037h…B PHANTOM ;保留向量地址偏移量-0041h。