
《机械设计基础》
第1章机械设计概论
复习重点
1. 机械零件常见的失效形式
2. 机械设计中,主要的设计准则
习题
1-1 机械零件常见的失效形式有哪些?
1-2 在机械设计中,主要的设计准则有哪些?
1-3 在机械设计中,选用材料的依据是什么?
第2章润滑与密封概述
复习重点
1. 摩擦的四种状态
2. 常用润滑剂的性能
习题
2-1 摩擦可分哪几类?各有何特点?
2-2 润滑剂的作用是什麽?常用润滑剂有几类?
第3章平面机构的结构分析
复习重点
1、机构及运动副的概念
2、自由度计算
平面机构:各运动构件均在同一平面内或相互平行平面内运动的机构,称为平面机构。
3.1 运动副及其分类
运动副:构件间的可动联接。(既保持直接接触,又能产生一定的相对运动)
按照接触情况和两构件接触后的相对运动形式的不同,通常把平面运动副分为低副和高副两类。
3.2 平面机构自由度的计算
一个作平面运动的自由构件具有三个自由度,若机构中有n个活动构件(即不包括机架),在未通过运动副连接前共有3n个自由度。当用P L个低副和P H个高副连接组成机构后,每个低副引入两个约束,每个高副引入一个约束,共引入2P L+P H个约束,因此整个机构相对机架的自由度数,即机构的自由度为
F=3n-2P L-P H (1-1)
下面举例说明此式的应用。
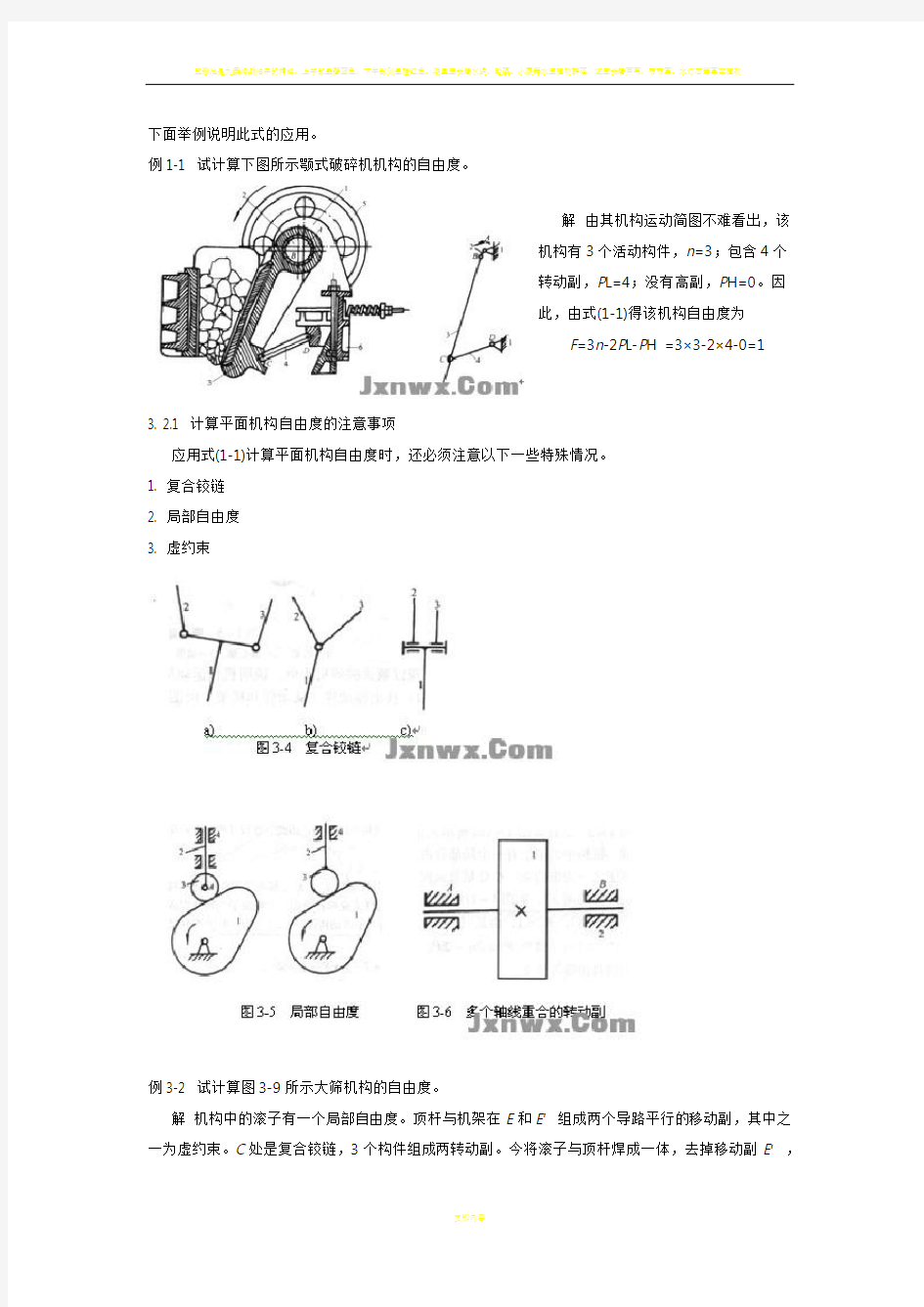
例1-1 试计算下图所示颚式破碎机机构的自由度。
解由其机构运动简图不难看出,该
机构有3个活动构件,n=3;包含4个
转动副,P L=4;没有高副,P H=0。因
此,由式(1-1)得该机构自由度为
F=3n-2P L-P H =3×3-2×4-0=1
3. 2.1 计算平面机构自由度的注意事项
应用式(1-1)计算平面机构自由度时,还必须注意以下一些特殊情况。
1. 复合铰链
2. 局部自由度
3. 虚约束
例3-2 试计算图3-9所示大筛机构的自由度。
解机构中的滚子有一个局部自由度。顶杆与机架在E和E′组成两个导路平行的移动副,其中之一为虚约束。C处是复合铰链,3个构件组成两转动副。今将滚子与顶杆焊成一体,去掉移动副E′,
如图1-9b所示。该机构有7个活动构件,n=7,P L =9 (7个转动副和2个移动副),P H =1,由式(1-1)得
F=3n-2P L-P H =3×7-2×9-1=2
此机构的自由度等于2。
3.3 机构具有确定运动的条件
机构的自由度也即是平面机构具有独立运动的个数。机构要运动,其自由度F必大于零。机构中每个原动件具有一个独立运动,因此,机构自由度必定与原动件的数目相等。
习题
3-1 一个在平面内自由运动的构件有多少个自由度?
3-2 运动副所产生的约束数与自由度有何关系?
3-3 机构具有确定运动的条件是什么?
3-4 计算图3-14所示机构的自由度,指出机构运动简图中的复合铰链、局部自由度和虚约束。
第4章平面连杆机构
复习重点
1. 四杆机构的基本类型及其演化;
2. 平面四杆机构的基本特性
平面连杆机构是由若干构件用低副(转动副和移动副)联接而成,所以又称为低副机构。
习题
一. 正误判断(正确的在题后括号内划“√”,错误的划“×”.)
1) 处于死点位置的机构是不可能运动的。(×)
2) 曲柄摇杆机构中,当摇杆为从动件时,机构才有死点位置出现。(√)
3)曲柄摇杆机构中死点位置可能出现在曲柄与连杆共线的位置上。(√)
二.选择填空
1.铰链四杆机构中的运动副是(C)。
A)高副 B)移动副C)转动副D)点接触的具有一定相对运动的联接
2. 铰链四杆机构ABCD中,已知AB=50、BC=115、CD=120、DA=30,若该机构属于双曲柄机构,则机架是(A )。
A)AB杆 B )BC杆 C )CD杆 D)DA杆
第5章凸轮机构
复习重点
1、常用运动规律的特点,刚性冲击,柔性冲击,S-δ曲线绘制
2、凸轮轮廓设计原理—反转法,自锁、压力角与基圆半径的概念
习题
5-1某直动对心从动件盘状凸轮沿顺时针方向转动时,从动件以等速上升,其行程h=30mm,回程等速返回处;从动件各运动阶段凸轮的转角为:δ1=120o,δ2=60o,δ3=120o,δ4=60o。试绘制从动件的位移线图。
第6章间歇运动机构
复习重点
了解四种常用间歇机构的工作原理及应用
习题
6-1 什么叫间歇运动机构? 常用的间歇运动机构有哪几种?
第7章螺纹连接
复习重点
1. 螺纹的基本知识
2. 螺纹连接
习题
7-1 常用的螺纹牙型有几种?说明各自的特点和应用场合。
7-2 螺纹的公称直径指哪一直径?螺栓强度计算使用哪一直径?螺纹几何尺寸计算使用哪一直径?
7-3 螺纹联接为什么要预紧?常用控制预紧力的方法有哪些?
7-4 螺纹联接为什么要防松?防松的根本问题是什么?按照防松原理,举例说明如何实现防松。
7-5满足何种条件时,螺旋传动具有自锁特性?
第8章轴毂联接
轮毂联接是实现轴和轴上零件之间的周向定位,主要方式有:键联接、花键联接和过盈配合。
复习重点
1. 键连接
习题
8-1 在一直径为80 mm的轴上,安装齿轮,轴与轮毂材料均为45钢,轮毂宽度为120mm,有轻微冲击。试选择键的尺寸,并计算传递的最大转矩。
第9章带传动和链传动
复习重点
1. 带传动的组成、工作原理、传动特点
2. 链传动的组成、工作原理、传动特点
9.1带传动的结构特点:
1、组成:主动轮、从动轮、传动带
2、分类:
㈠按工作原理分:摩擦型、啮合型带传动
㈡按带的截面形状分:
a.平型带传动——最简单,适合于中心距a较大的情况
b.V 带传动——三角带
c.多楔带传动——适于传递功率较大要求结构紧凑场合
d.同步带传动——啮合传动,高速、高精度,适于高精度仪器装置中带比较薄,比较轻。
㈢按带的传动形式分:
开口传动:两轮转向相同
交叉传动:两轮转向相反
半交叉传动:用于交错轴
二、工作原理、工作特点、应用
1、工作原理:靠摩擦和靠啮合两种
2、工作特点:适宜布置在高速级
优点:可远距离传动、缓冲吸振、过载保护、结构简单、维护方便
缺点:传动比不准确、传动效率低、带的寿命短、压轴力大
η带=0.92~0.95 、η链=0.95~0.97、η齿轮=0.97~0.99
3、应用:功率(P≤100 KW)、带速(V=5~25 m/s)、传动比(i≤7)
三、受力分析
工作前:两边初拉力Fo=Fo
工作时:两边拉力变化:
①紧力 Fo→F1;②松边Fo→F2
F1—Fo = Fo—F2
F1—F2 = 摩擦力总和Ff = 有效圆周力Fe
所以: 紧边拉力:F1=Fo + Fe/2
松边拉力:F2=Fo—Fe/2
另外:带受到的弯曲拉力:σb1和σb2
离心拉力:Fc=qv2 (应力σc)
带传动的应力分布图:如下
带的弹性滑动和打
滑
㈠弹性滑动:带与轮缘之间会发生不显著的相对滑动称为---。
滑动的结果:V1>V>V2
㈡打滑:当带传动的有效圆周力超过了带的极限摩擦力时,带
和带轮之间发生显著的相对滑动,称为---。
㈢弹性滑动和打滑的区别:
⑴弹性滑动是不显著的相对滑动,只发生在部分包角范围内;
而打滑是显著的相对滑动,发生在全部包角范围内。
⑵弹性滑动是带工作时的固有特性,是不可避免的;
而打滑是带过载时的一种失效形式,是可以避免的。
四、失效形式: 1、带的疲劳破坏 2、打滑
习题
9-1 带传动中的弹性滑动与打滑有何区别?对传动有何影响?影响打滑的因素有哪些?如何避免打滑?
9-2 在V带传动设计时,为什么要限制带的根数?
9-3 带传动的主要失效形式是什么?
9-4 带传动工作中,带上所受应力有哪几种?如何分布?最大应力在何处?
第10章链传动
复习重点
1. 链传动的组成、工作原理、传动特点
链传动的组成、工作原理、传动特点
1、组成:主动链轮、从动链轮、传动链
2、工作原理:靠啮合。
(滚子链:靠链节和链轮轮齿的啮合。齿形链:靠链齿和轮齿的啮合)
3、传动特点:
㈠优点:(和带比)⑴无弹性滑动、打滑现象、i平均=常数⑵压轴力小⑶可在恶劣环境(如高温、油污、潮湿)中工作⑷传动效率比带高
(和齿轮比)易安装、远距离传动轻便。
㈡缺点:⑴i瞬时≠常数⑵传动时有振动、冲击、噪声⑶只能用于两平行轴之间的传动⑷传动急速反转时性能较差。
4.传动链结构特点:
按链条的结构不同分:⑴套筒滚子链:(简称滚子链)⑵齿型链
⑴滚子链:)
①结构:由外链板、内链板、套筒、滚子、销轴五部分组成。
各部分关系:销轴与套筒、套筒与滚子为间隙配合。
销轴与外链板、套筒与内链板为过盈配合。
另外:内、外链板之间留有一定间隙,以便润滑油渗入到铰链的摩擦面间。
内、外链板均制成“∞”型。(从减轻重量和等强度两方面考虑)
链的排数:一般不超过4排。
连结数通常取偶数(∵接头方便, 无过渡链节)
②链条的参数与标记:参数已标准化,分A、B系列。表11-1给出了A系列的一些参数。
主要参数为:节距P (相邻销轴之间的中心距)
③标记如:滚子链20A--2×60 GB/T/243-1997
表示:A系列、节距P=20×25.4/16=31.75 mm 、双排、60节的滚子链。
⑵齿形链:(无声链)
是由一组齿形链板由铰链联接而成。
按铰链的形式不同又分圆销式、轴瓦式、滚柱式等)
5、受力分析:
㈠静止时:通过控制松边垂度而使链条保持一定的张紧力(即:悬垂拉力F3)如图
F3=kfqga
(kf---垂度系数,当垂度f=0.02a时,kf---垂度系数可查表11-3、q---每米长链的质量、g--重力加速度、a--中心距)
㈡工作时:与带相似,也分松紧边,但注意,松边在下,紧边在上。(与带传动正好相反)松边拉力=F3+F2 (F2---离心拉力F2=qv2;F3---张紧力或悬垂拉力)
紧边拉力=F3+F2+F1 (F1---有效工作拉力,F1=1000P/V KW)
注意与带的区别:⑴初拉力F3没有再变大或变小,∵链板之间可以相对转动,∴不像带有伸长收缩的明显改变。
⑵没有弯曲应力σb ∵链包在链轮上,链板可以自由转动,∴不受弯曲应力。
由链条的受力分析可知:链条受交变应力的作用,且受附加的动载荷作用,∴链条会发生疲劳破坏。习题
10-1 影响链传动速度不均匀性的主要因素是什么?
10-2 链传动为何要适当张紧?常用的张紧方法有哪些?
10-3 链传动与带传动的张紧目的有何区别?
第11章齿轮机构
复习重点
1、齿轮机构的类型
2、渐开线齿廓的啮合特性
3、标准渐开线直齿圆柱齿轮的基本参数和几何尺寸计算
4. 齿轮传动的失效形式
5. 齿轮传动中的受力分析(齿轮的转向及轮齿旋向分析)
11.1 齿轮机构的类型
齿轮机构的类型很多,按两齿轮轴线间的相互位置、齿向和啮合情况不同,齿轮机构可分为以下几种基本类型,如表11-1所示。
表11-1 齿轮机构的类型
11.2 渐开线齿廓的啮合特性
渐开线齿廓啮合传动具有如下几个特性:
(1) 能够保证定传动比传动
(2) 中心距变动不影响传动比
(3) 齿廓上压力方向不变
11.3 标准渐开线直齿圆柱齿轮的基本参数和几何尺寸计算
11.3.1 齿轮各部分名称和符号
11.3.2 渐开线标准直齿圆柱齿轮的基本参数
图11-3 不同模数齿轮的齿形
1. 齿数z 在齿轮整个圆周上轮齿的总数称为该齿轮的齿数,符号为z。
2. 模数m
齿轮分度圆的直径d、齿距p与齿数z的关系有:πd=pz 或,为了便于设计、制造、检验和安装,令m称为齿轮的模数,其单位为mm。于是得到分度圆直径d=mz
模数反映了齿轮的轮齿及各部分尺寸的大小。当齿数不变时,模数越大,其齿距、齿厚、齿高和分度圆直径都相应增大。图11-3给出了不同模数齿轮齿形。
为了设计、制造、检验和使用的方便,齿轮的模数已经标准化。
3. 压力角α分度圆上的压力角简称压力角,以α表示。国家标准(GB/T1356-1988)中规定,分度圆上的压力角为标准值,通常取α=20°,在某些场合也采用α=15°、25°等值。
4. 其它齿形参数
1) 顶隙系数c*
在一对齿轮传动时,为避免一轮的齿顶与另一轮的齿槽底部相抵触,并有一定的空隙贮存润
滑油,故一轮的齿顶圆与另一轮的齿根圆留有径向间隙,称为顶隙,用c表示。标准的顶隙值取模数的倍数:c=c*m。
2) 齿顶高系数ha*
轮齿的高度取模数的倍数。对于标准齿轮,取:齿顶高ha= ha*m,则齿根高hf=( ha*+c*)m。
国家标准规定:正常齿ha*=1,c*=0.25;短齿ha*=0.8,c*=0.3。
11.3.3 标准渐开线直齿圆柱齿轮几何尺寸的计算
标准齿轮是指m、α、ha*、c*均为标准值,并且s=e的齿轮。为便于计算和设计,现将渐开线标准直齿圆柱齿轮几何尺寸的计算公式列于表4-3中。
表4-3 标准渐开线直齿圆柱齿轮几何尺寸的计算公式
例11-1 已知标准直齿圆柱齿轮的模数m=3 mm和齿数z=20,试求齿轮的分度圆直径、齿顶圆直径、齿根圆直径、齿顶高、齿根高、齿厚和齿槽宽。
解:由表4-3所列公式分别计算如下:
11.9 齿轮传动的失效形式
对齿轮失效形式的分析有助于准确选择齿轮传动强度设计方法,以及寻求防止或延缓失效最有效、最经济的对策。齿轮传动的失效主要是轮齿的失效,其失效形式主要有以下五种:1. 轮齿折断2. 齿面点蚀3. 齿面磨损4. 齿面胶合5. 齿面塑性变形
11.10 齿轮材料
根据轮齿失效形式的分析可以知道,齿轮材料应具备如下性能:①齿面具有足够的硬度,以获得较高的抗点蚀、抗磨损、抗胶合的能力;②齿芯有足够的韧性,以获得较高的抗弯曲和抗冲击能力;③良好的加工和热处理工艺性能;④经济性。
11.11 轮齿的受力分析
图11-6所示为一标准直齿圆柱齿轮传动,轮齿在节点C处接触。若忽略摩擦力,轮齿间相互作用的法向力Fn沿着啮合线方向并垂直于齿面。为了计算方便,将法向载荷Fn在节点C 处分解为两个相互垂直的分力,即圆周力Ft与径向力Fr(单位均为N)。
由此可得:
(11-1)
式中 Tl——主动轮传递的名义转矩(N·m);
dl——主动轮分度圆直径(mm);
α——压力角。
(11-2)
式中 P1——主动轮传递的功率(kW);
n1——主动轮的转速(r/min)。
作用于主动轮和从动轮上的各对应力等值反向。各分力的方向:①圆周力Ft,对于主动轮为阻力,与回转方向相反;对于从动轮为驱动力,与回转方向相同;②径向力Fr,分别指向各自轮心(外啮合齿轮)。
习题
11-1 何谓标准直齿圆柱齿轮?
11-2 渐开线直齿圆柱齿轮的正确啮合条件和连续传动条件是什么?
11-3现有一对标准直齿圆柱齿轮传动。已知齿数z1=21,z2=53,模数m=2.5 mm。分别求两齿轮的分度圆直径、齿顶圆直径、齿根圆直径、基圆直径、中心距、齿距、齿厚、齿槽宽、传动比以及渐开线在分度圆处的曲率半径和齿顶圆上的压力角。
11-4 常见的齿轮失效形式有哪几种?
11-5 圆柱齿轮传动中大、小齿轮的齿宽是否相等?为什么?
11-6 齿轮传动中两齿轮的齿面接触应力和齿根弯曲应力是否相等?为什么?
11-7 齿轮润滑的意义何在?常用的润滑方法有何异同?
11-8 图示为二级展开式斜齿圆柱齿轮减速器,已
知主动轮1的转向和旋向,为使Ⅱ轴上两齿轮的
轴向力相互抵消。试确定:
(1)斜齿轮2、3、4的螺旋线方向;
(2)各轴的转向;
(3)画出中间Ⅱ轴上的2齿轮受力图(即标出Ft2、Fr2、Fx2的方向)。
第12章蜗杆传动
复习重点
1. 蜗杆传动的结构、特点
2. 蜗杆传动受力分析
12.1蜗杆传动的结构、特点:
1. 组成:蜗杆和蜗轮。
2. 形成:斜齿轮演化而成。
3. 蜗杆传动的类型:(根据蜗杆的形状不同分三类)
⑴圆柱蜗杆传动:
⑵环面蜗杆传动:(或称圆弧面蜗杆传动)
⑶锥蜗杆传动:(ZK型---)
12.2蜗杆传动的受力分析:
总法向力Fn分解为三个力:⑴切向力:Ft2=2T2/d2≈Fx1
⑵径向力:Fr2≈Fr1
⑶轴向力:Fx2≈Ft1
当蜗杆为主动件时,先以左右手定则定出蜗杆轴向力Fx1,在定蜗轮。应力分析:
主要为:⑴接触应力σH
⑵弯曲应力:σF
其次为:压应力、切应力、摩擦剪应力等。
第13章齿轮系
复习重点
1、掌握定轴轮系,周转轮系传动比的计算
2、定轴轮系转向判别,转化轮系法求解周转轮系传动比方法
3、熟练掌握复合轮系传动比的计算方法及轮系的组成分析
13.1 轮系的分类
轮系:用一系列互相啮合的齿轮将主动轴和从动轴连接起来,这种多齿轮的传动装置称为轮系。
定轴轮系(普通轮系)
周转轮系
复合轮系定+周(复杂轮系)
周+周
13.2定轴轮系及其传动比计算
13.3 周转轮系的传动比计算
13.4 复合轮系传动比的计算
第14章机械传动设计
复习重点
1、机械传动的组成
2、机械传动的类型
习题
14-1 传动装置的主要作用是什么?
14-2 选择传动类型时应考虑哪些主要因素?
第15章机械的调速与平衡复习重点
1、机器运转速度波动调节的目的
2、速度波动调节的方法
3、回转件平衡的目的
4、刚性回转件的平衡
15.1调节机器速度波动的目的
1、周期性速度波动
危害:①引起动压力,η↓和可靠性。
②可能在机器中引起振动,影响寿命、强度。
③影响工艺,↓产品质量。
2、非周期性速度波动
危害:机器因速度过高而毁坏,或被迫停车。
通过相应的手段对两类速度波动进行调节,将上述不良影响限制在容许范围之内。
15.2机器周期性速度波动的调节方法
机器中某一回转轴上加飞轮
飞轮:能量存储器
15.3 机器非周期性速度波动的调节方法
采用调速器
15.4平衡的目的
平衡的目的:尽量减小惯性力所引起的附加动压力。
附加的动压力:①附加载荷;②振动(源)
习题
15-1 什么是速度波动?周期性与非周期性速度波动调节各采用什么方法?15-2 飞轮的作用有哪些?其调速的原理是什么?
15-3 什么是静平衡?什么是动平衡?各至少需要几个平衡平面?
静平衡、动平衡的力学条件各是什么?
15-4 动平衡的构件一定是静平衡的,反之亦然,对吗?为什么?
第16章轴
复习重点
1. 轴的分类
2. 轴的结构设计
16.1轴的分类
㈠按承载分:
⑴心轴(只受弯)
⑵传动轴:(只受扭矩)
⑶转轴:(既受弯又受扭矩)
㈡按轴的形状分:
⑴直轴:应用最广。