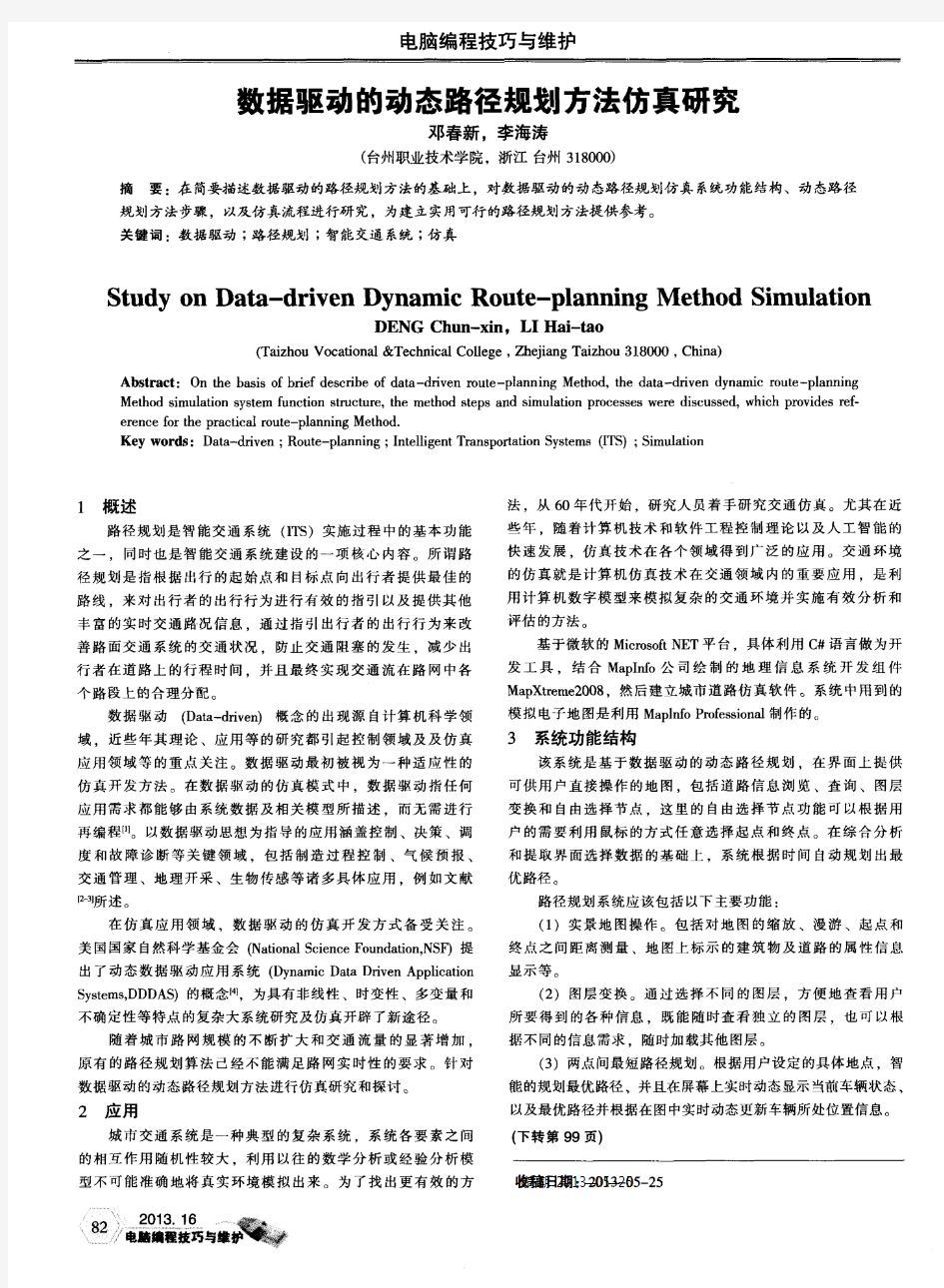
例1:机器负荷分配问题 某公司新购进1000台机床,每台机床都可在高、低两种不同的负荷下进行生产,设在高负荷下生产的产量函数为g(x )=10x (单位:百件),其中x 为投入生产的机床数量,年完好率为a =0.7;在低负荷下生产的产量函数为h(y)=6y (单位:百件),其中y 为投人生产的机床数量,年完好率为b=0.9。计划连续使用5年,试问每年如何安排机床在高、低负荷下的生产计划,使在五年内生产的产品总产量达到最高。 例2:某企业通过市场调查,估计今后四个时期市场对某种产品的需要量如下表: 时期(k) 1 2 3 4 需要量(d k ) 2(单位) 3 2 4 假定不论在任何时期,生产每批产品的固定成本费为3(千元),若不生产,则为零;生产单位产品成本费为1(千元);每个时期生产能力所允许的最大生产批量为不超过6个单位,则任何时期生产x 个单位产品的成本费用为: 若 0<x ≤6 , 则生产总成本=3十1·x 若 x =0 , 则生产总成本=0 又设每个时期末未销售出去的产品,在一个时期内单位产品的库存费用为0.5(千元),同时还假定第1时期开始之初和在第4个时期之末,均无产品库存。现在我们的问题是;在满足上述给定的条件下,该厂如何安排各个时期的生产与库存,使所花的总成本费用最低? 例3:设某企业在第一年初购买一台新设备,该设备在五年内的年运行收益、年运行费用及更换新设备的净费用如下表:(单位:万元) 年份(k) 役龄(t) 运行收益()k g t 运行费用()k r t 更新费用()k c t 第一年 0 22 6 18 第二年 0 1 23 21 6 8 19 22
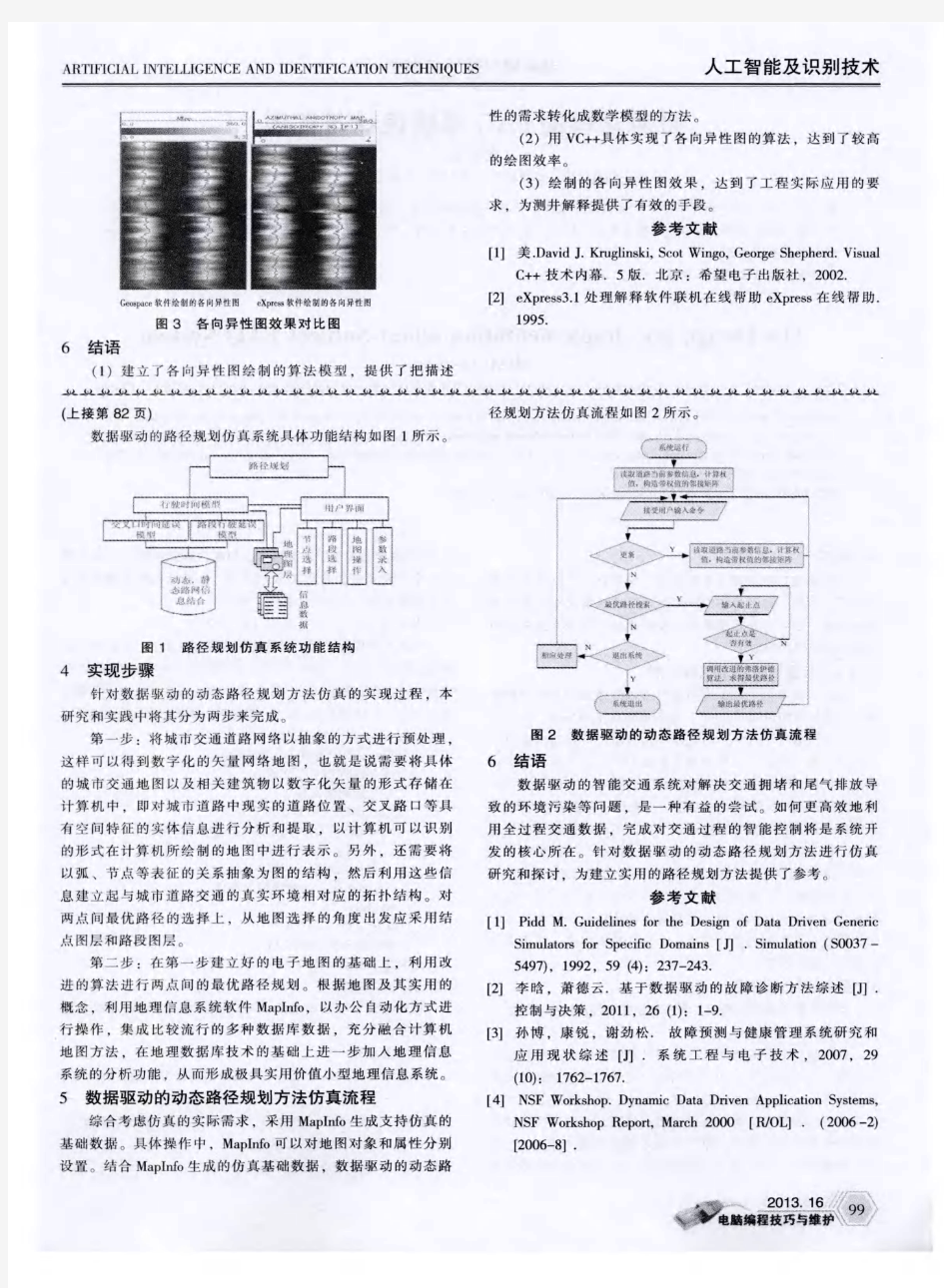
运用动态规划模型解决物流配送中的最短路径问题 王嘉俊 (盐城师范学院数学科学学院09(1)班) 摘要:随着现代社会的高速发展,物流配送成为了连接各个生产基地的枢纽,运输的成本问题也成为了企业发展的关键。运费不但与运量有关,而且与运输行走的线路相关。传统的运输问题没有考虑交通网络,在已知运价的条件下仅求出最优调运方案,没有求出最优行走路径。文中提出“网络上的物流配送问题“,在未知运价,运量确定的情况下,将运输过程在每阶段中选取最优策略,最后找到整个过程的总体最优目标,节省企业开支。 关键词:动态规划,数学模型,物流配送,最优路径 1 引言 物流配送是现代化物流系统的一个重要环节。它是指按用户的订货要求, 在配送中心进行分货、配货, 并将配好的货物及时送交收货人的活动。在物流配送业务中, 合理选择配送径路, 对加快配送速度、提高服务质量、降低配送成本及增加经济效益都有较大影响。物流配送最短径路是指物品由供给地向需求地的移动过程中, 所经过的距离最短(或运输的时间最少, 或运输费用最低) , 因此, 选定最短径路是提高物品时空价值的重要环节。[1] 经典的Dijkstra 算法和Floyd 算法思路清楚,方法简便,但随着配送点数的增加,计算的复杂性以配送点数的平方增加,并具有一定的主观性。我国学者用模糊偏好解试图改善经典方法[]5,取得了较好的效果。遗憾的是,模糊偏好解本身就不完全是客观的。文献[]6详细分析了经典方法的利弊之后,提出将邻接矩阵上三角和下三角复制从而使每条边成为双通路径,既适用于有向图也适用于无向图, 但复杂性增加了。为了避免上述方法存在的不足,本文以动态规划为理论,选择合理的最优值函数,用于解决物流配送最短路径问题。 动态规划是解决多阶段决策过程最优化问题的一种数学方法。1951年美国数学家Bellman(贝尔曼)等人根据一类多阶段决策问题的特性,提出了解决这类问题的“最优性原理”,并研究了许多实际问题,从而创建了最优化问题的一种新方法——动态规划。 动态规划在工程技术、管理、经济、工业生产、军事及现代控制工程等方面都有广泛的应用,而且由于动态规划方法有其独特之处,在解决某些实际问题时,显得更加方便有效。由于决策过程的时间参数有离散的和连续的情况,故决
清扫机器人路径规划方法研究 摘要:近年来,智能清扫机器人系统的研究和开发已具备了坚实的基础和良好的 发展前景。现在的智能清扫机器人通过软硬件的合理设计,使其能够自动避开障 碍物,实现一般家居环境及特定户外环境的自主清扫工作。本文简单介绍了清扫 机器人基于无环境模型的路径规划的具体办法。 关键词:清扫机器人、无环境模型、路径规划 一、绪论 机器人的研究在日本和欧美的一些发达国家的研究相对比较深入,同时也取 得了很多显著的成果。国内关于清扫机器人的研究也取得了极大的进展。我国继 清华大学于1994年通过智能清扫机器人鉴定之后,陆续有中国科学院沈阳自动 化所研制了全方位移动式机器人视觉导航系统;2001年香港城市大学完整地研究了地面清扫机器人的导航、控制及整个硬件系统;2009年哈尔滨工业大学与香港中文大学合作,联合研制开发出一种全方位地面清扫机器人。总而言之,清洁机 器人的研究正在快速发展,并且也越来越深入,但是还有需要完善和改进的地方,例如清洁机器人的避障问题,路径规划等等,所以针对清扫机器人进行一系列的 技术研究探讨是相当有意义的。 二、基于无环境模型的路径规划 清洁机器人的路径规划是根据机器人所感知到的工作环境信息,按照某种优 化指标,在起始点和目标点规划出一条与环境障碍无碰撞的路径,并且实现所需 清扫区域的合理完全路径覆盖,同时实现封闭区域内机器人行走路径对工作区域 的最大覆盖率和最小重复率。目前全区域覆盖路径规划有两种,一种是无环境模 型的路径规划,另一种是基于环境模型的路径规划。本文主要着重介绍无环境规 划的整个过程。 无环境模型的路径规划不需要建立环境模型,有随机遍历路径规划和全区域 覆盖路径规划两种模式。机器人在清扫的时候比较自由,一般都是采用递进的方式,清扫完这个直线再偏移一段距离,掉头清扫另外一条直线,以达到全区域清扫,本文也着重介绍无环境模型的路径规划。基于无环境模型的依据边界的路径 规划方法 三、基于无环境模型的路径规划具体方法 (一)建立房间边界 首次在未知空间内行驶时,小车所能记录的信息为两种,一种是小车两个驱 动轮行驶路程L1与L2,另一种是各传感器被触发的状态。下图是小车在某转角 处的路线图,根据以上特点及为后续数据处理提供依据,我们可以建立如下规则。轨迹计算原理,数据处理规则。 (1)小车转角计算 若小车沿某一物体边缘转过θ角,则可以通过如下公式求算θ角 规定为行走时小车的拐角,规定连续经过多个拐角时,为各自拐角的和。 (2)小车行程的计算 小车行程的计算可以按照两驱动轮轨迹线的中心线即可代表小车行驶时的轨迹,小车行 车记录为: (3)机器人沿着边界行驶 机器人选择任意一方向寻找边界,找到边界后,小车沿边界方向前进直到遇到拐角。行 进过程中根据传感器状态确定内外侧路径,确定完内外侧后,小车前进过程中所记录的拐角
动态规划讲解大全 动态规划(dynamic programming)是运筹学的一个分支,是求解决策过程(decision process)最优化的数学方法。20世纪50年代初美国数学家R.E.Bellman等人在研究多阶段决策过程(multistep decision process)的优化问题时,提出了著名的最优化原理(principle of optimality),把多阶段过程转化为一系列单阶段问题,逐个求解,创立了解决这类过程优化问题的新方法——动态规划。1957年出版了他的名著Dynamic Programming,这是该领域的第一本著作。 动态规划问世以来,在经济管理、生产调度、工程技术和最优控制等方面得到了广泛的应用。例如最短路线、库存管理、资源分配、设备更新、排序、装载等问题,用动态规划方法比用其它方法求解更为方便。 虽然动态规划主要用于求解以时间划分阶段的动态过程的优化问题,但是一些与时间无关的静态规划(如线性规划、非线性规划),只要人为地引进时间因素,把它视为多阶段决策过程,也可以用动态规划方法方便地求解。 动态规划程序设计是对解最优化问题的一种途径、一种方法,而不是一种特殊算法。不象前面所述的那些搜索或数值计算那样,具有一个标准的数学表达式和明确清晰的解题方法。动态规划程序设计往往是针对一种最优化问题,由于各种问题的性质不同,确定最优解的条件也互不相同,因而动态规划的设计方法对不同的问题,有各具特色的解题方法,而不存在一种万能的动态规划算法,可以解决各类最优化问题。因此读者在学习时,除了要对基本概念和方法正确理解外,必须具体问题具体分析处理,以丰富的想象力去建立模型,用创造性的技巧去求解。我们也可以通过对若干有代表性的问题的动态规划算法进行分析、讨论,逐渐学会并掌握这一设计方法。 基本模型 多阶段决策过程的最优化问题。 在现实生活中,有一类活动的过程,由于它的特殊性,可将过程分成若干个互相联系的阶段,在它的每一阶段都需要作出决策,从而使整个过程达到最好的活动效果。当然,各个阶段决策的选取不是任意确定的,它依赖于当前面临的状态,又影响以后的发展,当各个阶段决策确定后,就组成一个决策序列,因而也就确定了整个过程的一条活动路线,如图所示:(看词条图) 这种把一个问题看作是一个前后关联具有链状结构的多阶段过程就称为多阶段决策过程,这种问题就称为多阶段决策问题。 记忆化搜索 给你一个数字三角形, 形式如下: 1 2 3 4 5 6 7 8 9 10 找出从第一层到最后一层的一条路,使得所经过的权值之和最小或者最大. 无论对与新手还是老手,这都是再熟悉不过的题了,很容易地,我们写出状态转移方程:f(i, j)=a[i, j] + min{f(i+1, j),f(i+1, j + 1)} 对于动态规划算法解决这个问题,我们根据状态转移方程和状态转移方向,比较容易地写出动态规划的循环表示方法。但是,当状态和转移非常复杂的时候,也许写出循环式的动态规划就不是那么
多机器人路径规划研究方法 张亚鸣雷小宇杨胜跃樊晓平瞿志华贾占朝 摘要:在查阅大量文献的基础上对多机器人路径规划的主要研究内容和研究现状进行了分析和总结,讨论了多机器人路径规划方法的评判标准,并阐述了研究遇到的瓶颈问题,展望了多机器人路径规划方法的发展趋势。 关键词:多机器人;路径规划;强化学习;评判准则 Abstract:This paper analyzed and concluded the main method and current research of the path planning research for multi robot.Then discussed the criterion of path planning research for multi robot based large of literature.Meanwhile,it expounded the bottleneck of the path planning research for multi robot,forecasted the future development of multi robot path planning. Key words:multi robot;path planning;reinforcement learning;evaluating criteria 近年来,分布式人工智能(DAI)成为人工智能研究的一个重要分支。DAI研究大致可以分为DPS(distributed problem solving)和MAS(multi agent system)两个方面。一些从事机器人学的研究人员受多智能体系统研究的启发,将智能体概念应用于多机器人系统的研究中,将单个机器人视做一个能独立执行特定任务的智能体,并把这种多机器人系统称为多智能体机器人系统(MARS)。因此,本文中多机器人系统等同于多智能体机器人系统。目前,多机器人系统已经成为学术界研究的热点,而路径规划研究又是其核心部分。 机器人路径规划问题可以建模为一个带约束的优化问题,其包括地理环境信息建模、路径规划、定位和避障等任务,它是移动机器人导航与控制的基础。单个移动机器人路径规划研究一直是机器人研究的重点,且已经有许多成果[1~3],例如在静态环境中常见的有连接图法、可视图法、切线图法、Voronoi图法、自由空间法、栅格法、拓扑法、链接图法、Dempster Shafer 证据理论建图等;动态环境中常见的有粒子群算法、免疫算法、遗传算法、神经网络、蚁群算法、模拟退火算法、人工势场法等。然而,多机器人路径规划
关于动态规划方法的最优消费路径有些学者从微观经济理论的角度探索消费和投资的最优比率。例如,Phelps构建了不确定收入下的最优消费率[2 ]。基于这一模型,Me r t o n以布朗运动模拟不确定收益,利用动态规划建模的方式,求出在连续时间假设下获得最大消费效用的消费和资产投资组合[3 ]。然而M e r t o n的模型采用了P r a t t的绝对风险厌恶度(absolute risk aversion)[4], 即假设投资者的风险偏好是和年龄、财富无关的常数,从而把家庭总财富比率设计成常数。为了改进过于严格的常系数风险厌恶假设,F a r h i和Pan — ageas假设投资者可以通过控制退休时间来调整劳动供给,从而实现最优消费和投资[5]。另外有些学者拓展了M e F t o n等人的模型,如Ilakansso n和Ri c h a r d研究了存在保险时的生命周期最优消费[6 ][ 7 ]; Karat z a s使用鞅方法研究了个人如何选择消费率来实现消费和财富效用最大化[8 ]; B o d i e等人探讨了退休期间的最优消费投资问题[9]。有些学者则从宏观经济学的角度阐述消费和投资对消费效用最大化的影响。李嘉图的古典消费理论强调了消费对经济的刺激。凯恩斯绝对收入假说认为消费主要取决于当期绝对收入,平均消费倾向(APC)随收入增加而减少。按此假说,一战后,美国人民收入增加,储蓄应随之增加。但是,K u z n e t s实证研究发现战后储蓄并未增加,长期A P C稳定[10]。为解析上述矛盾现象,D u esenberr y提出相对收入假说,家庭会比较其他家庭的收入, 即相对水平,来决定自己的消费水平[1 1 ] ( P 3 )。相对收入假说的缺陷在于家庭的消费是短视行为,没有考虑未来收入。
路径规划论文:路径识别与路径规划方法的研究 【中文摘要】随着科学技术的发展,各种各样的机器人陆续出现,机器人越来越受到人们的重视,而中国大学生机器人大赛暨Robocup 公开赛更是吸引了很多爱好者。机器人游中国可看成迷你的旅游,这跟目前假期短,如何能够合理安排,多参观几个景点的问题相吻合,故也大大引起大家的兴趣。本文以游中国机器人为研究对象,研究路径规划和路径识别的方法。基本思想是:首先根据比赛要求,建立大赛的基本界面平台,对图像进行数据存储,为遍历做准备。然后根据经典的遍历方法,通过改进来实现景点的遍历,比较得到一条较理想的旅游 路线。另一方面机器人在前进时要根据看到的路况来控制速度,因此对道路情况进行提取,并通过一系列方法去由环境等引起除噪声及冗余信息,得到较好的道路目标。然后对前方路况的几种情况进行提取分析,利用角点检测的方法来确定分支数,使机器人能够更好的选择 路线。具体实现过程如下:1.地图的存储。首先建立大赛涉及的基本界面平台,分析比较了几种常用的图存储方法的优劣。2.遍历算法。首先介绍了人工智能中常用的几种遍历算法,并对各个算法的复杂性和适用情况进行分析比较。根据该项目中的需要加以改进,得到不同的遍历路线。再... 【英文摘要】With the development of science and technology, a variety of robots showed up, that’s the reason that more and more people pay attention to the robot. However, Robot
动态规划中的最长路径问题 题目:设图G=(V, E)是一个带权有向连通图,如果把顶点集合V 划分成k个互不相交的子集Vi(2≤k≤n, 1≤i≤k),使得E中的任何一条边(u, v),必有u∈Vi,v∈Vi+m(1≤i<k,1<i+m≤k),则称图G为多段图,称s∈V1为源点,t∈Vk为终点。多段图的最长路径问题是求从源点到终点的最大代价路径 由于多段图将顶点划分为k个互不相交的子集,所以,多段图划分为k段,每一段包含顶点的一个子集。不失一般性,将多段图的顶点按照段的顺序进行编号,同一段内顶点的相互顺序无关紧要。假设图中的顶点个数为n,则源点s的编号为0,终点t的编号为n-1,并且,对图中的任何一条边(u, v),顶点u的编号小于顶点v的编号。 一个多段图 用c(u,v)表示边上的权值,将从源点s到终点t的最长路径记
为d(s, t),则从源点0到终点9的最长路径d(0, 9)由下式确定:d(0, 9)=max{c01+d(1, 9), c02+d(2, 9), c03+d(3, 9)}这是最后一个阶段的决策,它依赖于d(1, 9)、d(2, 9)和d(3, 9) d(1, 9)=max{c14+d(4, 9), c15+d(5, 9) } d(2, 9) =max{c24+d(4, 9), c25+d(5, 9) , c26+d(6, 9) } d(3, 9) =max{c35+d(5, 9), c26+d(6, 9) } 这是倒数第二阶段的式子它分别依赖于d(4, 9),d(5, 9),d(6, 9) d(4, 9)= max{c47+d(7, 9), c48+d(8, 9) } d(5, 9)= max{c57+d(7, 9), c58+d(8, 9) } d(6, 9)= max{c67+d(7, 9), c68+d(8, 9) } 这是倒数第三阶段的式子它们依赖于d(7, 9),d(8, 9) d(7, 9)= c79=7 d(8, 9)= c89=3 再往前推 d(6, 9)=max{c67+d(7, 9), c68+d(8, 9)} = max {6+7, 5+3}=13(6→8) d(5, 9)= max {c57+d(7, 9), c58+d(8, 9)} = max {8+7, 6+3}=15(5→8) d(4, 9)= max {c47+d(7, 9), c48+d(8, 9)} = max {5+7, 6+3}=12(4→7) d(3, 9)= max {c35+d(5, 9), c36+d(6, 9)} = max {4+15, 7+13}=20(3→6)
第七章动态规划 规划问题的最终目的就是确定各决策变量的取值,以使目标函数达到极大或极小。在线性规划和非线性规划中,决策变量都是以集合的形式被一次性处理的;然而,有时我们也会面对决策变量需分期、分批处理的多阶段决策问题。所谓多阶段决策问题是指这样一类活动过程:它可以分解为若干个互相联系的阶段,在每一阶段分别对应着一组可供选取的决策集合;即构成过程的每个阶段都需要进行一次决策的决策问题。将各个阶段的决策综合起来构成一个决策序列,称为一个策略。显然,由于各个阶段选取的决策不同,对应整个过程可以有一系列不同的策略。当过程采取某个具体策略时,相应可以得到一个确定的效果,采取不同的策略,就会得到不同的效果。多阶段的决策问题,就是要在所有可能采取的策略中选取一个最优的策略,以便得到最佳的效果。动态规划(dynamic programming)同前面介绍过的各种优化方法不同,它不是一种算法,而是考察问题的一种途径。动态规划是一种求解多阶段决策问题的系统技术,可以说它横跨整个规划领域(线性规划和非线性规划)。当然,由于动态规划不是一种特定的算法,因而它不象线性规划那样有一个标准的数学表达式和明确定义的一组规则,动态规划必须对具体问题进行具体的分析处理。在多阶段决策问题中,有些问题对阶段的划分具有明显的时序性,动态规划的“动态”二字也由此而得名。动态规划的主要创始人是美国数学家贝尔曼(Bellman)。20世纪40年代末50年代初,当时在兰德公司(Rand Corporation)从事研究工作的贝尔曼首先提出了动态规划的概念。1957年贝尔曼发表了数篇研究论文,并出版了他的第一部著作《动态规划》。该著作成为了当时唯一的进一步研究和应用动态规划的理论源泉。1961年贝尔曼出版了他的第二部著作,并于1962年同杜瑞佛思(Dreyfus)合作出版了第三部著作。在贝尔曼及其助手们致力于发展和推广这一技术的同时,其他一些学者也对动态规划的发展做出了重大的贡献,其中最值得一提的是爱尔思(Aris)和梅特顿(Mitten)。爱尔思先后于1961年和1964年出版了两部关于动态规划的著作,并于1964年同尼母霍思尔(Nemhauser)、威尔德(Wild)一道创建了处理分枝、循环性多阶段决策系统的一般性理论。梅特顿提出了许多对动态规划后来发展有着重要意义的基础性观点,并且对明晰动态规划路径的数学性质做出了巨大的贡献。 动态规划在工程技术、经济管理等社会各个领域都有着广泛的应用,并且获得了显著的效果。在经济管理方面,动态规划可以用来解决最优路径问题、资源分配问题、生产调度问题、库存管理问题、排序问题、设备更新问题以及生产过程最优控制问题等,是经济管理中一种重要的决策技术。许多规划问题用动态规划的方法来处理,常比线性规划或非线性规划更有效。特别是对于离散的问题,由于解析数学无法发挥作用,动态规划便成为了一种非常有用的工具。 动态规划可以按照决策过程的演变是否确定分为确定性动态规划和随机性动态规划;也可以按照决策变量的取值是否连续分为连续性动态规划和离散性动态规划。本教材主要介绍动态规划的基本概念、理论和方法,并通过典型的案例说明这些理论和方法的应用。 §7.1 动态规划的基本理论 1.1多阶段决策过程的数学描述 有这样一类活动过程,其整个过程可分为若干相互联系的阶段,每一阶段都要作出相应的决策,以使整个过程达到最佳的活动效果。任何一个阶段(stage,即决策点)都是由输入(input)、决策(decision)、状态转移律(transformation function)和输出(output)构成的,如图7-1(a)所示。其中输入和输出也称为状态(state),输入称为输入状态,输出称为输出状态。
动态规划练习题 [题1] 多米诺骨牌(DOMINO) 问题描述:有一种多米诺骨牌是平面的,其正面被分成上下两部分,每一部分的表面或者为空,或者被标上1至6个点。现有一行排列在桌面上:顶行骨牌的点数之和为6+1+1+1=9;底行骨牌点数之和为1+5+3+2=11。顶行和底行的差值是2。这个差值是两行点数之和的差的绝对值。每个多米诺骨牌都可以上下倒置转换,即上部变为下部,下部变为上部。 现在的任务是,以最少的翻转次数,使得顶行和底行之间的差值最小。对于上面这个例子,我们只需翻转最后一个骨牌,就可以使得顶行和底行的差值为0,所以例子的答案为1。 输入格式: 文件的第一行是一个整数n(1〈=n〈=1000〉,表示有n个多米诺骨牌在桌面上排成一行。接下来共有n行,每行包含两个整数a、b(0〈=a、b〈=6,中间用空格分开〉。第I+1行的a、b分别表示第I个多米诺骨牌的上部与下部的点数(0表示空)。 输出格式: 只有一个整数在文件的第一行。这个整数表示翻动骨牌的最少次数,从而使得顶行和底行的差值最小。 [题2] Perform巡回演出 题目描述: Flute市的Phlharmoniker乐团2000年准备到Harp市做一次大型演出,本着普及古典音乐的目的,乐团指挥L.Y.M准备在到达Harp市之前先在周围一些小城市作一段时间的巡回演出,此后的几天里,音乐家们将每天搭乘一个航班从一个城市飞到另一个城市,最后才到达目的地Harp市(乐团可多次在同一城市演出). 由于航线的费用和班次每天都在变,城市和城市之间都有一份循环的航班表,每一时间,每一方向,航班表循环的周期都可能不同.现要求寻找一张花费费用最小的演出表. 输入: 输入文件包括若干个场景.每个场景的描述由一对整数n(2<=n<=10)和k(1<=k<=1000)开始,音乐家们要在这n个城市作巡回演出,城市用1..n标号,其中1是起点Flute市,n是终点Harp市,接下来有n*(n-1)份航班表,一份航班表一行,描述每对城市之间的航线和价格,第一组n-1份航班表对应从城市1到其他城市(2,3,...n)的航班,接下的n-1行是从城市2到其他城市(1,3,4...n)的航班,如此下去. 每份航班又一个整数d(1<=d<=30)开始,表示航班表循环的周期,接下来的d个非负整数表示1,2...d天对应的两个城市的航班的价格,价格为零表示那天两个城市之间没有航班.例如"3 75 0 80"表示第一天机票价格是75KOI,第二天没有航班,第三天的机票是80KOI,然后循环:第四天又是75KOI,第五天没有航班,如此循环.输入文件由n=k=0的场景结束. 输出: 对每个场景如果乐团可能从城市1出发,每天都要飞往另一个城市,最后(经过k天)抵达城市n,则输出这k个航班价格之和的最小值.如果不可能存在这样的巡回演出路线,输出0. 样例输入: 样例输出:
最短路径问题 下图给出了一个地图,地图中每个顶点代表一个城市,两个城市间的连线代表道路,连线上的数值代表道路长度。 现在,我们想从城市a到达城市E。怎样走才能使得路径最短,最短路径的长度是多少?设DiS[x]为城市x到城市E的最短路径长度(x表示任意一个城市); map[i,j]表示i,j两个城市间的距离,若map[i,j]=0,则两个城市不通; 我们可以使用回溯法来计算DiS[x]: var S:未访问的城市集合; function search(who{x}):integer; {求城市who与城市E的最短距离} begin if Who=E Then Search←0 {找到目标城市} Else begin min←maxint;{初始化最短路径为最大} for i 取遍所有城市 Do if(map[Who,i]>0{有路})and(i S{未访问}) then begin S←S-[i];{置访问标志} j←map[Who,i]+ search(i); {累加城市E至城市Who的路径长度} S←S+[i]; {回溯后,恢复城市i未访问状态} if j<min Then min←j; {如果最短则记下} end;{then} search←min;{返回最短路径长度} End;{else} End;{search} begin S←除E外的所有城市; Dis[a]←search(a);{计算最短路径长度} 输出Dis[a]; end.{main} 这个程序的效率如何呢?我们可以看到,每次除了已经访问过的城市外,其他城市都要访问,所以时间复杂度为O(n!),这是一个“指数级”的算法。那么,还有没有效率更高的解题方法呢?
[选取日期] NUAA未知环境的动态路径规划 [键入文档副标题] | 刘绍翰
度量距离 灰度化 四连通和8连通。 第一章、静态搜索与A*算法 很多时候,我们需要在一个图中寻找一条从源点到目标节点的最短路径,我们称之为路径规划。搜索算法主要分为,盲目搜索和启发式搜索,它们的一个作用是能够从解空间中需找一条从源点到目标节点的最短路径。启发式搜索是在搜索的过程中,参考一定的指标函数来决定搜索的策略。 迪杰斯特拉算法,类似于广度优先遍历,利用源点到当前节点的代价值作为指标,其一定可以获得从原点到目标节点的最短路,但是其访问的节点数很多。 而最好优先搜索,采用离标节点的距离作为搜索的代价参考值,贪心选择最小的扩展节点,也可以获得最短路径,而且其搜索的节点数目大大减少。 图1 迪杰斯特拉算法图2 最好优先搜索算法当地图中包含障碍物时,迪杰斯特拉算法,仍然可以获得最短路径的路径,最好优先搜索的节点尽管少,但是其不能获得最优解。 图3 迪杰斯特拉算法图4 最好优先搜索算法而A*算法,参考了从原点到当前节点的代价值和当前节点到目标节点启发值,综合了迪杰斯特拉算法和做好优先搜索算法优点,在有障碍物和无障碍物的地图上,可以像迪杰斯特拉算法一样求得最短路径同时,同时能够像最好优先搜索一样减少搜索范围,减少搜索节点的数目。
图5 无障碍物时A*路径规划 图6 有障碍物时A*路径规划算法 经典的迪杰斯特拉算法可以求得最短的路径,而启发式搜索A* 算法,不但可以求得最短路,而且可以使得搜索的范围大大减少,上述算法是传统的静态路径规划算法,其规划的前提条件是已经知地图的结构。A*算法属于离线事先规划,在规划完毕之后,可以沿着最优路径移动,不是在线规划,不能一边规划一边移动。 A*算法的基本理论 A*算法又叫做启发式搜索算法,具有悠久的历史,其启发函数f=g+h 。其中g 表示从原点到当前节点已经付出的代价,好表示从当前节点到目标节点的启发值。 1) A*算法必须满足h(x)<=h*(x),其中h*(x)是实际的启发值,h*(x)在实际中通常是无 法事先得知的,但是这个条件是很容易满足,只要满足该条件,一定能够获得最优解。 2) 如果最短路径长度为C*, 则在算法结束前,open 表中至少有一个节点n, 满足 f(n) <= C*. 这个性质可以这样理解, 因为最短路径存在, 我们不妨设它为: source->a->b->c->...->n->.....->goal. 且在当前时刻,路径中在节点n 前的节点都在closed 表中,即已经扩展了,而节点n 自己在open 表中(注意:算法结束前任意时刻都有这样的节点n 存在)。 则由于该条路劲是最短路径,我们可以知道此时在open 表中的n 的 g(n)值已经是准确值, 即最小值了。而 f(n) = g(n) + h(n) = g*(n) + h(n) <= g*(n) + h*(n) = C* . (最后一个式子取等号是由于n 在最短路径上) 有了这个性质,我们就知道,当A*算法扩展到目标节点时,必有f(goal) = g(goal) <= C* (即 = C*)。否则, 如果f(goal) > C*,由于目标节点是被扩展节点, 则open 表中其他任意其他节点t, 都有f(t) >= f(goal) > C*, 和性质1 矛盾。 3) 扩展新节点时很容易出现重复节点的问题,从上面的伪代码可以看出, 如果新 扩展节点已经存在于closed 表中, 且f 值比表中节点的f 值还要小的话,则除了更新该节点f 值,还需要重新扩展该节点,这简直就是把人从棺材里拖出来。 但是如果h 函数满足相容性,这一步就可以省掉了。所谓相容性就是指对任意节点s1,都满足: h(s1) <= h(s2) + c(s1,s2) (其中c(s1,s2)是指从s1转移到s2的代价)有这个性质我们在不等号两边加上g(s1), 则有 g(s1) + h(s1) <= h(s2) + g(s1) + c(s1,s2)。 如果我们此时扩展s1, 而s2又是能被s1扩展的节点,则由这个式子我们得到 f(s1) <= f'(s2). (若s2之前就已经被扩展出了,则当前的f(s2)可能比f'(s2)小) 这个式子的意义在于由当前节点进行扩展这个方案下得到的节点的f 值总比当前扩展节点的f 值大(子节点总比父节点
1、单调递增最长子序列 描述 求一个字符串的最长递增子序列的长度 如:dabdbf最长递增子序列就是abdf,长度为4 输入 第一行一个整数0 2、最长公共子序列 描述 如题,需要写一个程序,得出最长公共子序列。 tip:最长公共子序列也称作最长公共子串(不要求连续),英文缩写为LCS(Longest Common Subsequence)。其定义是,一个序列S ,如果分别是两个或多个已知序列的子序列,且是所有符合此条件序列中最长的,则S 称为已知序列的最长公共子序列。 输入 第一行给出一个整数N(0 3、括号匹配 时间限制:1000 ms | 内存限制:65535 KB 描述 给你一个字符串,里面只包含"(",")","[","]"四种符号,请问你需要至少添加多少个括号才能使这些括号匹配起来。 如: []是匹配的 ([])[]是匹配的 ((]是不匹配的 ([)]是不匹配的 输入 第一行输入一个正整数N,表示测试数据组数(N<=10) 每组测试数据都只有一行,是一个字符串S,S中只包含以上所说的四种字符, S的长度不超过100 输出 对于每组测试数据都输出一个正整数,表示最少需要添加的括号的数量。每组 测试输出占一行 样例输入 4 [] ([])[] ((] ([)] 样例输出 3 2 动态规划之最短路径问题源代码 #include "stdio.h" #include "conio.h" #define n 16 /*图的顶点数*/ #define k 7 /*图的段数*/ #define l 30 #define MAX 100 typedef int NodeNumber;/*节点编号*/ typedef int CostType;/*成本值类型*/ CostType cost[n][n]; NodeNumber path[k]; NodeNumber cur=-1; void creategraph(CostType *cost[n][n]) /*创建图的成本矩阵*/ { int i,j,x,y,value; for(i=0;i 动态规划习题 Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】 动态规划专题分类视图数轴动规题: 题1.2001年普及组第4题--装箱问题 【问题描述】有一个箱子容量为V(正整数,0≤V≤20000),同时有n个物品(0 对于100%的数据,砝码的种类n满足:1≤n≤100; 对于30%的数据,砝码的总数量C满足:1≤C≤20; 对于100%的数据,砝码的总数量C满足:1≤C≤100; 对于所有的数据,砝码的总重量W满足:1≤W≤400000; 题3.石子归并-szgb.pas 【问题描述】有一堆石头质量分别为W1,W2,…,Wn.(Wi≤10000),将石头合并为两堆,使两堆质量的差最小。 【输入】输入文件szgb.in的第一行只有一个整数n(1≤n≤50),表示有n堆石子。接下去的n行,为每堆石子质量。 【输出】输出文件szgb.out的只有一行,该行只有一个整数,表示最小的质量差. 【样例输入】 5 5 8 13 27 14 【样例输出】 3 题4.补圣衣 【问题描述】有四个人,每人身上的衣服分别有s1,s2,s3和s4处破损,而且每处破损程度不同,破损程度用需修好它用的时间表示 (A1...As1,B1...Bs2,C1...Cs3,D1...Ds4)。不过你可以同时修补2处破损。但是这2处破损,只能是同一件衣服上的。就是说你只能同时修补一件衣服,修好了,才能修补下一件。 【输入】本题包含5行数据:第1行,为s1,s2,s3,s4(1≤s1,s2,s3,s4≤20) 第2行,为A1...As1共s1个数,表示第一件衣服上每个破损修好它所需的时间 第3行,为B1...Bs2共s2个数,表示第二件衣服上每个破损修好它所需的时间 第4行,为C1...Cs3共s3个数,表示第三件衣服上每个破损修好它所需的时间 第5行,为D1...Ds4共s4个数,表示第四件衣服上每个破损修好它所需的时间 (1≤A1...As1,B1...Bs2,C1...Cs3,D1...Ds4≤60) 【输出】输出一行,为修好四件衣服所要的最短时间。 【样例输入】 1213 5 43 6 243 【样例输出】 20 题5.光光的作业homework.pas/homework.exe 【问题描述】光光上了高中,科目增多了。在长假里,光光的老师们都非常严厉,都给他布置了一定量的作业。假期里,光光一共有的时间是k小时。在长假前,老师们一共给光光布置了n份作业,第i份作业需要的时间是ti小时。但是由于老师们互相不 多段图最短路径【源程序】 //本程序测试用例为作业题 #include } cost[n-1]=0;//对于最后一个顶点要进行特殊的初始化path[n-1]=-1; for(inti=n-2; i>=0; i--) for(int j=i+1; j 运用动态规划模型解决物流配送中的最短 路径问题 摘要:随着现代社会的高速发展,物流配送成为了连接各个生产基地的枢纽,运输的成本问题也成为了企业发展的关键。运费不但与运量有关,而且与运输行走的线路相关。传统的运输问题没有考虑交通网络,在已知运价的条件下仅求出最优调运方案,没有求出最优行走路径。文中提出“网络上的物流配送问题“,在未知运价,运量确定的情况下,将运输过程在每阶段中选取最优策略,最后找到整个过程的总体最优目标,节省企业开支。 关键词:动态规划,数学模型,物流配送,最优路径 1 引言 物流配送是现代化物流系统的一个重要环节。它是指按用户的订货要求, 在配送中心进行分货、配货, 并将配好的货物及时送交收货人的活动。在物流配送业务中, 合理选择配送径路, 对加快配送速度、提高服务质量、降低配送成本及增加经济效益都有较大影响。物流配送最短径路是指物品由供给地向需求地的移动过程中, 所经过的距离最短(或运输的时间最少, 或运输费用最低) , 因此, 选定最短径路是提高物品时空价值的重要环节。[1] 经典的Dijkstra 算法和Floyd 算法思路清楚,方法简便,但随着配送点数的增加,计算的复杂性以配送点数的平方增加,并具有一定的主观性。我国学者用模糊偏好解试图改善经典方法[]5,取得了较好的效果。遗憾的是,模糊偏好解本身就不完全是客观的。文献[]6详细分析了经典方法的利弊之后,提出将邻接矩阵上三角和下三角复制从而使每条边成为双通路径,既适用于有向图也适用于无向图, 但复杂性增加了。为了避免上述方法存在的不足,本文以动态规划为理论,选择合理的最优值函数,用于解决物流配送最短路径问题。 动态规划是解决多阶段决策过程最优化问题的一种数学方法。1951年美国数学家Bellman(贝尔曼)等人根据一类多阶段决策问题的特性,提出了解决这类问题的“最优性原理”,并研究了许多实际问题,从而创建了最优化问题的一种新方法——动态规划。 动态规划在工程技术、管理、经济、工业生产、军事及现代控制工程等方面都有广泛的应用,而且由于动态规划方法有其独特之处,在解决某些实际问题时,显得更加方便有效。由于决策过程的时间参数有离散的和连续的情况,故决动态规划之最短路径源代码
动态规划习题完整版
多段图最短路径_动态规划
运用动态规划模型解决最短路径问题 3
相关主题
文本预览