安川机器人操作及简单故障处理
- 格式:doc
- 大小:67.00 KB
- 文档页数:11

安川机器人维护和教示方法一、机器人维护1.定期检查:根据安川机器人操作手册中的要求,建立一个定期的检查计划,检查机器人的各个部件和系统,特别是关键的传感器、执行器、线缆等。
确保它们正常工作,并进行必要的维修和更换。
2.清洁保养:保持机器人整洁是维护机器人的基本要求。
定期清理机器人的外壳、传感器、关节等部位,清除积尘和异物,防止机器人因尘埃堆积而影响其工作效果。
3.润滑维护:安川机器人的关键部件和机械连接点需要定期进行润滑,以确保其运转的顺畅和稳定。
根据机器人操作手册中的润滑要求,对机器人的关节、滑轨、传动系统等进行润滑和维护。
4.故障排除:在机器人运行过程中,如果出现故障或异常,及时进行排查和修复。
安川机器人配备了完善的自诊断系统,能够记录和分析故障信息,使维修更加便捷。
5.备件储备:及时更新和维护机器人的备件库存,包括关键的传感器、执行器、电缆等。
确保在需要更换零部件时,能够快速获得并及时进行更换。
二、机器人教示1.离线教示:在机器人正常运行和生产的情况下,使用机器人教示软件进行离线教示。
操作员根据零件图纸和工艺规范,编写机器人的示教程序。
通过离线教示,可以提前规划好机器人的动作轨迹和执行逻辑。
2.在线教示:在机器人运行期间,通过操作面板或者远程控制设备,现场对机器人进行在线教示。
在实际操作过程中,操作员可以根据需要,对机器人的动作、速度、力度等进行调整和修正,确保机器人的动作准确和稳定。
3.技术培训:技术培训是安川机器人教示的重要环节。
操作员需要完成安川机器人的基础培训,了解机器人的结构、原理、工作模式等,并熟练掌握机器人的操作和故障排除方法。
此外,操作员还需要定期参加安川机器人的升级培训,了解新的功能和技术的应用。
4.多媒体教学:为了提高教学效果,可以使用多媒体技术来辅助教示。
通过投影仪、电子白板等设备,将机器人的操作界面和示教程序展示给操作员。
这样可以提供更直观、更生动的教学效果,加强操作员的理解和记忆。
安川教程1
本文档是安川教程,旨在介绍安川的基本概念、安装与配置、编程及操作等方面的内容。
以下是各章节的详细细化内容:
1、安川简介
1.1 安川的用途和优势
1.2 安川的类型和系列
1.3 安川的特点和应用领域
2、安装与配置
2.1 安装的硬件设备
2.2 连接控制器和外部设备
2.3 配置的软件环境
2.4 校准的姿态和坐标系
3、编程基础
3.1 安川的编程语言和工具
3.2 创建程序和任务
3.3 编写基本的运动指令
3.4 调试和运行程序
4、操作
4.1 远程操作
4.2 监控和调整的状态
4.3 安全操作的注意事项
4.4 故障排除和维护
5、附件
附件1、安川技术规格表
附件2、安川安装手册
法律名词及注释:
1、:指能够自动执行一系列任务的可编程机械装置。
2、安川控制器:安川的核心控制设备,用于控制的运动和功能。
3、软件环境:编程所需的软件及其配置,包括操作系统、编程
软件等。
4、校准:调整的姿态和坐标系,使其达到准确的运动和位置控制。
5、编程语言:一种用于编写程序指令的计算机语言,如安川专
用的编程语言。
本文档涉及附件:
1、附件1:安川技术规格表 - 详细介绍了安川的技术参数和性能指标。
2、附件2:安川安装手册 - 提供了安川的详细安装步骤和注意事项。
安川按键功能一览安川按键功能一览1. 项目概述本文档旨在提供关于安川的按键功能的详细信息,以便用户了解如何操作及最大程度地利用的功能。
2. 基本操作按键2.1 电源开关的电源开关位于的侧面,通过按下或拨动电源开关来打开或关闭的电源。
2.2 启动和停止按键的启动按键位于控制面板上,通过按下启动按键来启动。
同样,停止按键位于控制面板上,通过按下停止按键来停止的运行。
2.3 紧急停止按钮紧急停止按钮位于控制面板上,通过按下紧急停止按钮可以立即停止的所有动作。
该按钮通常为红色,以便于用户在紧急情况下迅速找到并按下。
3. 操纵杆的按键功能3.1 手臂运动控制杆手臂运动控制杆可用来控制手臂的运动。
向前或向后推动手臂运动控制杆可使手臂向前或向后运动,向左或向右倾斜手臂运动控制杆可使手臂向左或向右运动。
3.2 夹爪开闭按键夹爪开闭按键位于操纵杆上,通过按下夹爪开闭按键可使的夹爪进行开合动作。
通常,按下该按键一次夹爪闭合,再按一次则夹爪打开。
4. 触屏功能按键4.1 菜单按键菜单按键位于触屏上方,通过菜单按键可进入操纵界面的菜单选项。
4.2 设置按键设置按键位于触屏上方,通过设置按键可进入的设置界面,用户可以在该界面中进行各种配置和参数的修改。
4.3 保存按键保存按键位于触屏下方,通过保存按键可以保存用户的设置及配置。
5. 附件本文档涉及的附件包括安川的用户手册和控制面板说明书。
用户可以在这些附件中找到更详细的信息和操作指南。
6. 法律名词及注释6.1在本文档中,指的是安川公司生产的工业,用于在工业生产中自动执行各种任务的机械设备。
6.2 控制面板控制面板是上的一个组件,用于控制的运动和功能。
6.3 操纵杆操纵杆是控制面板上的一个组件,可以通过操作操纵杆来控制的运动。
安川机器人焊接设备作业指导书一、焊接设备安全操作1. 操作人员必须经过专业培训,并获得操作资格证书。
2. 操作前,确认机器人及其周边环境是否安全,各部件是否完好无损。
3. 严格按照制造商提供的操作手册进行操作,不得擅自更改程序和参数。
4. 在操作过程中,保持警觉,避免因疲劳或疏忽造成意外。
二、机器人编程与操作1. 根据焊接任务的要求,使用相应的编程语言(如MELFA-IRC5)进行编程。
2. 确保编程的正确性和安全性,避免因程序错误导致机器人误动或意外。
3. 在操作过程中,根据需要调整机器人的运动轨迹和姿态,确保焊接质量。
4. 密切关注机器人的运行状态,避免因机器人故障造成意外。
三、焊接工艺参数设定1. 根据焊接材料和厚度,选择合适的焊接工艺参数(如电流、电压、速度等)。
2. 根据实际情况,对焊接参数进行调整和优化,确保焊接质量和效率。
3. 定期检查和调整焊接设备,确保其工作状态良好。
4. 在焊接过程中,密切关注焊接质量,发现问题及时调整参数或暂停操作。
四、焊接程序优化与调试1. 根据实际需要,对焊接程序进行优化和调试,提高焊接效率和产品质量。
2. 在调试过程中,注意安全,避免因程序错误导致机器人误动或意外。
3. 对调试结果进行分析和总结,发现问题并及时解决。
4. 在优化和调试过程中,注意保护焊接程序的版权和保密性。
五、维护与保养1. 根据制造商提供的要求,定期对机器人及其周边设备进行保养和维护。
2. 在保养过程中,注意检查各部件的磨损和损坏情况,及时更换损坏部件。
3. 对机器人的关节和移动部件进行清洁和润滑,确保其正常运转。
4. 定期检查电气部件和线路,确保其工作状态良好。
六、故障排除与应急处理1. 在操作过程中,如遇故障或意外情况,应立即停机并报告给技术人员或维修人员。
2. 根据制造商提供的技术手册或维修指南,进行故障排除和应急处理。
3. 对常见的故障和问题进行归纳和总结,以便在后续操作中避免类似情况的发生。
安川自动线生产操作步骤
开机运转之前,需要确认以下几项。
机床方面:
确认当四台机床都没料的情况下,两台一序机床发出的信号是首件上料信号M28,两台二序机床发出的信号是首件上料信号M28。
机器人以及料道方面:
一开机后,检查上,下料道以及料道电柜上,共三个急停是否解除。
二检查机器人电柜和机器人手持操作盒的两个急停是否解除。
三机器人防护门是否关闭,如果是打开的,防护门左上方会闪烁红色的报警灯。
四启动料道,点料道电柜系统通电按键,料道电柜选择打在自动挡上,然后按料线启动按键,此时上下料道处于自动状态(上下料道都打在自动挡上)
五机器人手动回到作业原点位置,并打在远程控制模式下,然后按下料道电柜上的机器人调出主程序按键,此时机器人操作盒上会出现加工件的主程序,核对是否是所对应加工工件的主程序。
六确认正常,按料道电柜上的机器人启动按钮,机器人开始进入正常加工。
当生产人员完成当天生产量,需要清除机床内部剩余工件时,需要将加工主程序改成对应工件缩写加后缀-XIELIAO的主程序上,然后按照上述第五步和第六步进行,机器人会完成末件清除。
具体操作是选择机器人权限打开,然后点机器人操作盒左上角的程序内容按键,在子菜单下选择主程序按键,点机器人操作和右上角的选择键,同时选择要运行的主程序即可。
注明:
当下料道已经处于自动运转状态,但下料道放入工件后,却不自动运转,此情况是因为机器人给下料道处放料,人为干预,后没有继续按程序运行,导致机器人没有给料道发送完成下料信号导致。
此时需要调到程序中,找到完成卸料这一程序段,手动发送按联锁+前进按键后即可。
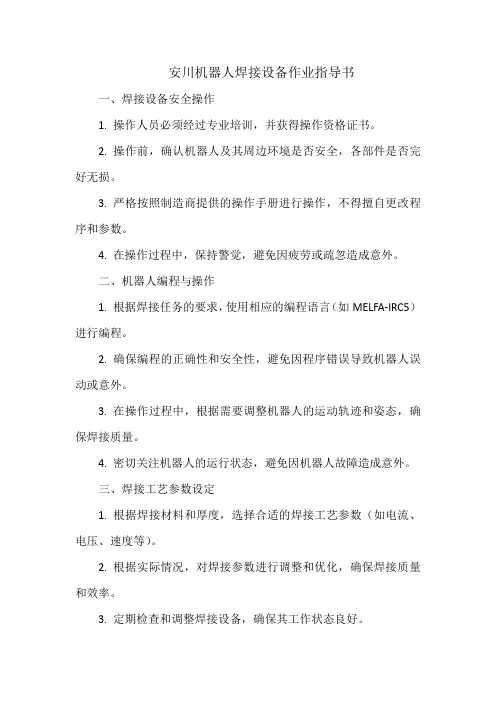
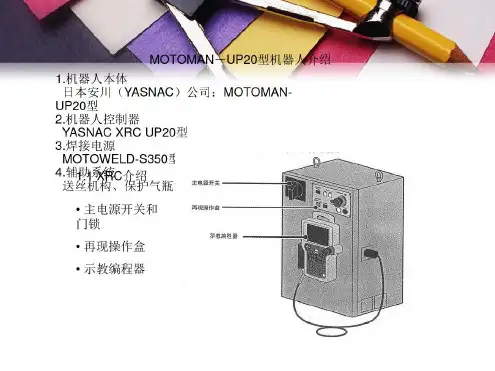
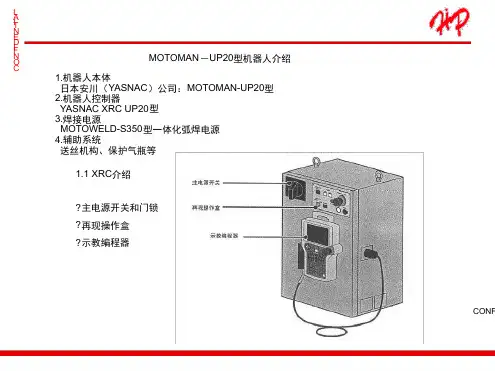
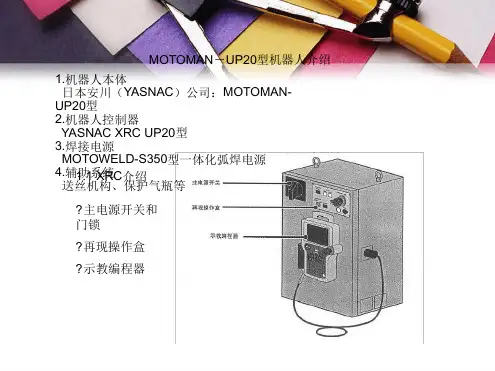
. . . . w. . .v 安川机器人操作及简单故障处理
一. 机器人简介 1、 硬件构成:我公司二期所用的日本安川公司机器人共有15 台,全部为MOTOMAN系列产品,共有SK120,SK6,SV3及UP6四种型号。四种型号的机器人都是由机器人本体,控制柜两部分构成。 机器人本体上装有伺服马达,传动机构及减速机构等机械装置。这几种型号的机器人都是有六个轴关节,由六台伺服马达和六套传动机构组成。六个轴的名称分别为S、L、U、R、B、T轴,其中S轴控制整个本体的来回旋转、L轴控制机器人下臂的前后摆动、U轴控制机器人上臂上下摆动、R轴控制上臂的来回旋转、B轴控制机器人手腕的上下摆动、T轴控制手腕的来回旋转。六个马达共同运动可以使机器人运行到其工作范围内的任意的一个空间位置。 控制柜内装有全部控制装置、再现操作盒及示教盘。控制装置包括主计算机(CPU单元),伺服马达驱动器,各种外部信号输入输出板,电源装置等。此系列机器人电源的额定输入为AC220V 50/60HZ三相电源,在国内使用时必须配备电源变压器。再现操作盒上装有各种操作按纽、指示灯及通讯口等装置。示教盘上有液晶显示器和各种操作按纽,主要用于编写程序、操作机器人及观察其工作状况等。 2、 机器人工作方式:机器人的工作方式为示教再现型,即由操 . . . . w. . .v 作者操作机器人完成一遍所有的预定动作,机器人记录下所走过各个位置点的坐标随后自动运行中按照示教的位置、速度完成所有动作。 机器人运动时的坐标系统有五个分别为:关节坐标系、直角坐标 系、圆柱坐标系、工具坐标系和用户坐标系。机器人在关节坐标系中运动方式为各轴单独运动互不影响;在直角坐标系中机器人以本体轴的X、Y、Z三个方向平行移动;在圆柱坐标系中机器人以本体轴Z轴为中心回旋、直角或平行移动;在工具坐标系中机器人以工具尖端点的X、Y、Z轴平行移动;在用户坐标系中由用户在机器人工作的范围之内任意设定不同角度的X、Y、Z轴,机器人可延所设的各轴平行移动。
二. 机器人的操作和程序的编写 1、 再现操作盒操作键说明:见P2-3 2、 示教盘操作键说明:见P2-6 3、 程序结构说明:机器人的程序语言为安川公司自己开发的专 用语言(INFORM II),其指令主要分为移动指令、输入输出指令、控制指令和平移指令、运算指令等。 移动指令主要有MOVJ(关节移动),MOVL(直线移动),MOVC(圆弧移动)等。其功能是控制机器人以移动命令规定的方式和速度运行到命令指定的位置。 输入输出指令主要有DOUT(开关量输出的ON或OFF),DIN(将. . . . w. . .v 外部开关量输入信号读入),WAIT(等待外部执行条件满足),AOUT(模拟信号输出)等。 控制指令主要有JUMP(转移到其它程序步),CALL(调出指定的程序),END(程序结束),TIMER(延时规定的时间),IF(条件判断)等。 运算指令主要有ADD(数据加),SUB(数据减),MUL(数据乘),DIV(除),AND(数据与),OR(数据或)等。功能是对 4、编写机器人程序的步骤:大致确定工作所需的位置,打开机器人伺服电源、按下ENABLE键。再用各轴移动键将机器人移动到第一点,按下MOTION TYPE键选择运动方式、按下PLAY SPD键选择运动速度,按下ENTER键确认,第一步程序即编辑完成。用各轴移动键将机器人移动到第二点,用同样的方法确定运动方式和速度完成第二步程序。以此类推完成其它各步骤。最后一步位置要和第一步位置重合可采用如下方式,调出已编辑好的程序,将光标移动到第一步,按下FWD键机器人向设定的第一步的位置移动,到达位置后将光标移动到最后一步,按下MODIFY键再按下ENTER键,最后一步的位置就和第一步重合。 5、程序的检查:按下DISP键再按下F1(JOB)键,将光标移动到第一步,按下FWD键机器人按照编制好的轨迹运动。 6、程序举例说明:排气投入机器人程序 主程序(MASTER JOB)说明: . . . . w. . .v NOP (空操作) CLEAR STACK(堆栈清零) DIN B000 IN#(21)(21#输入送到变量B000) DIN B001 IN#(22)(22#输入送到变量B001) DIN B002 IN#(23)(23#输入送到变量B002) AND B000 B001 (B000与B001) AND B000 B002 (B000与B001) JUMP *1 IF IN#(8)=OFF (如条件满足跳转到*1步) JUMP *1 IF IN#(3)=ON (如条件满足跳转到*1步) DOUT OT#(1) OFF (关闭输出1#) DOUT OT#(2) OFF (关闭输出2#) CALL JOB:QF IF B000=1 (如条件满足调子程序QF) *1 MOVJ C0000 VJ=70.00 (移动到工作原点位置) END
子程序QF说明: NOP (空操作) MOVJ C0000 VJ=50.00 (移动到位置C000) JUMP *10 IF IN#(29)=OFF(如条件满足跳转到*10步) . . . . w. . .v MOVJ C0001 VJ=50.00 (移动到位置C001) MOVJ C0002 VJ=50.00 (移动到位置C002) MOVL C0003 V=200.0 (移动到位置C003) DOUT OT#(1) ON (输出1#ON) TIMER T=2.00 (延时2秒) JUMP *11 IF IN#(3)=ON (如条件满足跳转到*11步) DOUT OT#(9) ON (输出9#ON) PAUSE (暂停) *11 DOUT OT#(9) OFF (输出9#OFF) DOUT OT#(21) ON (输出21#ON) WAIT IN#(30)=ON (等待输入30#ON) DOUT OT#(21) OFF (输出21#OFF) MOVL C0004 V=300.0 (移动到位置C004) MOVL C0005 V=800.0 (移动到位置C005) MOVL C0006 V=800.0 (移动到位置C006) MOVJ C0007 VJ=50.00 (移动到位置C007) JUMP *12 IF IN#(3)=OFF (如条件满足跳转到*12步) MOVJ C0008 VJ=50.00 (移动到位置C008) MOVJ C0009 VJ=50.00 (移动到位置C009) . . . . w. . .v MOVJ C0010 VJ=50.00 (移动到位置C0010) MOVJ C0011 VJ=50.00 (移动到位置C0011) MOVJ C0012 VJ=50.00 (移动到位置C0012) MOVJ C0013 VJ=50.00 (移动到位置C0013) MOVJ C0014 VJ=50.00 (移动到位置C0014) WAIT IN#(31)=OFF (等待输入31#OFF) WAIT IN#(31)=ON (等待输入31#ON) MOVL C0015 V=1100.0 (移动到位置C0015) MOVL C0016 V=200.0 (移动到位置C0016) DOUT OT#(1) OFF (输出1#OFF) DOUT OT#(2) ON (输出2#ON) TIMER T=0.50 (延时0.5秒) MOVL C0017 V=50.0 (移动到位置C0017) MOVL C0018 V=1500.0 (移动到位置C0018) MOVJ C0019 VJ=50.00 (移动到位置C0019) DOUT OT#(2) OFF (输出2#OFF) MOVJ C0020 VJ=50.00 (移动到位置C0020) MOVJ C0021 VJ=50.00 (移动到位置C0021) MOVJ C0022 VJ=50.00 (移动到位置C0022) *12 . . . . w. . .v MOVJ C0023 VJ=50.00 (移动到位置C0023) *10 RET (返回) END
三. 机器人的开,关机步骤 1.打开机器人供电电源开关及压缩空气开关。
2.打开机器人控制柜上的主电源开关。等机器人自检完毕后按下伺服电源按钮接通马达的伺服电源。按下控制柜上示教按钮(TEACH),使机器人转入示教模式。 3.按下示教盘上DISP键;按SELECT键;按F5(MJ CALL)键调出主程序。按上下箭头键将光标移到运动的第一步(其程序一般为 XXX 001 MOVJ VJ=70%);移到此处后若光标闪烁,说明机器人目前处不于原点位置。此时应手动操作机器人移动回原点后方可开机。 4.机器人回原点的方法为:移动光标到主程序(MJ)中运动的第一步;按下ENABLE键;按住FWD键机器人即向原点方向移动此时应注意观察机器人运动方向上有无障碍物,如有发生碰撞的可能松开FWD键,机器人即停止运动。移去障碍物或使用各轴单独运动键使其绕过障碍物,继续按住FWD键直到机器人停止运动同时光标也不再闪烁。此时的位置为原点位置。