第一章 CATIA_V5_运动仿真分析简介
- 格式:doc
- 大小:3.56 MB
- 文档页数:52




前言CATIA软件是法国达索飞机制造公司首先开发的。
它具有强大的设计、分析、模拟加工制造、设备管理等功能。
其设计工作台多达60多个,就足以说明软件功能的强大。
本书是作者在出版系列CATIA软件功能介绍后,专门针对某一项功能写的实例教程。
在讲解示例的过程中,作者也注意了将某些快捷功能插入进来,进行讲解。
比如在装配设计工作台对零件进行重新设计,比如在装配图中直接导入或者插入新的零件。
在同类的图书中,很难涉及到这些快捷功能。
本书是基于CATIA V5 R16写成的,在完成本书时,已经有R17版本了,读者在更高的版本上也可以使用此书。
读者在阅读本书,使用软件时,需要反复练习,才能熟练运用本书所讲解的一些功能。
可以根据本书的步骤,做一些自己学习和工作中遇到的模型,也可以拿机械设计的标准件来做练习实例。
本书适合做机械设计的专业人员和机械相关专业的学生使用。
本书也同样适合想学习CATIA软件的其他读者。
本书前面20章都是讲解某一项铰的设计方法,最后一章是综合前面各章内容做的一个实例。
本书编写过程中考虑到了初学者可能对CATIA机械零件设计的功能还不是很熟悉,因此,对于各章所涉及到的零件,模型建立方法都做了详细的介绍。
对于已经熟悉CATIA基本设计功能的读者,可以略读这部分内容,直接阅读各章最后一节的内容。
对于只想了解CATIA 机械零件设计的读者,可以仔细阅读每章前面各节的内容,把本书作为机械设计的详细教程,未尝不可。
感谢我的家人,他们给了我很大的支持,使我能抽出时间完成此书。
感谢我的单位领导对工作的支持,特别是反应堆结构室的领导和各位同仁,他们的鼓励和帮助,使我坚持下来完成此书,并使我受益匪浅。
本书由盛选禹和盛选军主编。
冯志江老师参加了本书第1、第2、第3章的编写工作。
王存福同志参加了第6、第7、第8章的编写工作参加本书编写工作的还有张宏志,王玉洁,孙新城,盛选贵,曹京文、陈树青、王恩标、于伟谦、盛帅、候险峰、盛硕、陈永澎、盛博、曹睿馨、张继革、刘向芳、富晶、孟庆元、宗纪鸿、唐守琴。

目录下篇ABAQUS FOR CATIA 有限元分析实例第一章 固支杆应力分析 (1)第二章 壳的平面应力计算 (22)第三章 一端固定的长方体 (40)第四章 平端盖的应力分析 (53)第五章 承受扭矩和弯曲载荷联合作用的轴 (67)第六章 带有虚拟零件的应力分析 (97)第七章 装配零件的应力分析 (107)第八章 接触分析 (125)第九章 螺栓计算 (151)第十章 抗震分析 (202)第十一章 材料非线性变形分析 (214)第十二章 热分析实例 (231)第十三章 结构和热联合分析 (258)第一章 固支杆应力分析(1) 设计一条直线进入CATIA软件的界面后,点击Start< Mechanical Design,<Wireframe and Surface Design,如图1-1所示。
图1-1点击Start< Mechanical Design<Wireframe and Surface Design点击Point点图标,出现Point Definition点定义对话框,如图1-2。
在Point Tyep点类型栏内选择Coordinates坐标,在x y z三个栏内都设置为0,点击Ok按钮,在坐标原点生成一个点。
图1-2Point Definition点定义对话框点击Line直线图标,出现Line Definition直线定义对话框,如图1-3。
在Line type 直线类型选择Point-Direction,然后在图上选择第一个点Point.1,然后选择xy plane参考平面,以这个面的法线方向作为直线的方向。
在Start起点栏内填0,在End终点栏内填120mm,点击Ok按钮,生成一条直线,如图1-4。
图1-3Line Definition直线定义对话框图1-4生成一条直线(2)对直线赋予材料属性在图上先点击选中直线,然后在工具栏内点击Apply material应用材料图标,点击后,出现一个警告消息框,如图1-5。

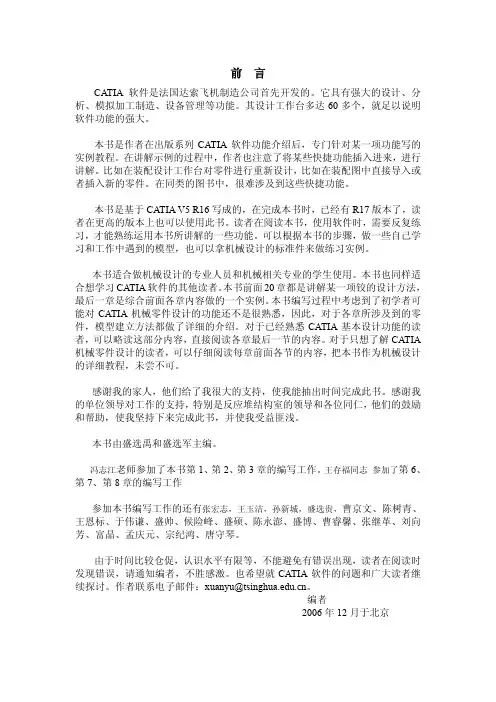
第三節零件之自然振動分析操作程序:一、讀入模型二、指定材質與變更單位三、進入自然振動分析模組四、給定夾持五、分析與結果六、載入應力分析七、給定負載八、分析與結果一、讀入模型1. 開啟Part檔在作業系統中按下(CATIA)圖示,選擇(零件設計模組),並在對話框中選擇Linkage .CAT,開啟之檔案如下圖所示。
二、指定材質與變更單位1. 選取零件並指定材質在靜力分析中必須指定材料之剛性、密度及其他機械性質,以便系統在執行分析時,據以建立模型之剛性矩陣與慣性力。
在下圖左之模型樹中以滑鼠左鍵點選零件,並按(指定材料)圖示,切換至Metal金屬材料之頁並選擇Steel鋼材,如下圖右所示。
完成之後模型樹將新增材質項目。
2. 變更單位在模型樹中以滑鼠右鍵點選零件,系統即顯示彈出式功能表如下圖左。
選擇Properties特性選項後,系統即進入其對話框,選擇Analysis,如下圖右所示。
對話框中顯示材料之剛性、密度及蒲松比等,SI單位之材料性質參數。
3. SI單位設定由於系統預設之材料資料庫皆是SI標準單位,現在將零件之單位改為與資料庫一致。
Catia之預設資料庫以標準單位存入,可避免因單位系統之人為疏忽所造成之分析錯誤,也可避免加速度與力之換算時單位轉換。
在下拉式功能表中選擇Tool>Options指令設定後即進入其對話框,選擇Units單位設定如下圖右。
對話框中顯示系統預設之單位有長度及慣性矩兩項使用mm為單位。
將長度及慣性矩兩項改為使用m為單位,以符合SI標準單位之要求。
三、進入應力分析模組1. 模型樹中選取零件完成SI單位之及材料性質之設定後,即可進入分析模組。
在模型樹中以滑鼠左鍵點選零件檔,並在下拉式功能表中選擇Start>Modal Analysis自然振動分析模組,系統即進入自然振動分析模組,如下圖右所示。
四、給定夾持1. 設定夾持本範例假設連桿兩端之中心孔夾持固定,點選夾持面如下圖左所示。
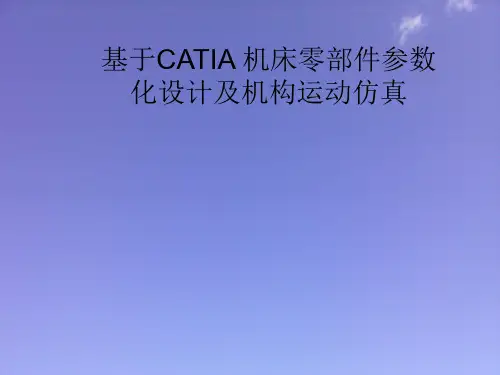
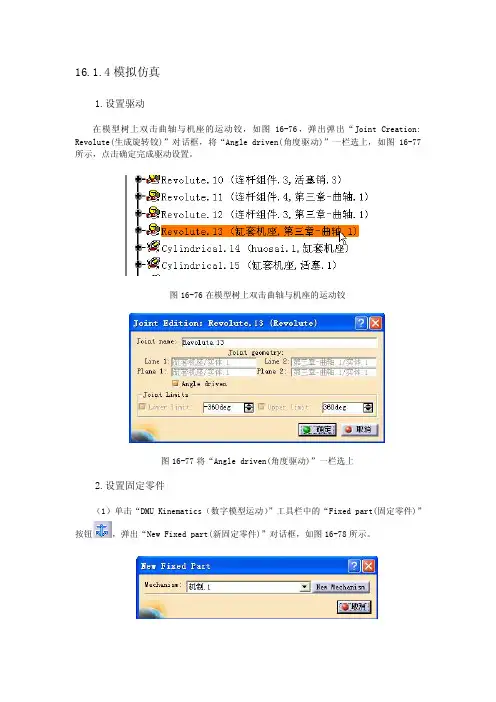
16.1.4模拟仿真
1.设置驱动
在模型树上双击曲轴与机座的运动铰,如图16-76,弹出弹出“Joint Creation: Revolute(生成旋转铰)”对话框,将“Angle driven(角度驱动)”一栏选上,如图16-77所示,点击确定完成驱动设置。
图16-76在模型树上双击曲轴与机座的运动铰
图16-77将“Angle driven(角度驱动)”一栏选上
2.设置固定零件
(1)单击“DMU Kinematics(数字模型运动)”工具栏中的“Fixed part(固定零件)”
按钮,弹出“New Fixed part(新固定零件)”对话框,如图16-78所示。
图16-78 “New Fixed part(新固定零件)”对话框
(2)在图形区上选择简易机座零件,并点击“确定”按钮。
(3)单击“确定”后,则弹出一个“Information(消息)”对话框,提示现在设置的机构已经可以被模拟,如图16-79所示。
单击对话框中的“确定”按钮,关闭对话框。
3.模拟四缸内燃机运动
(1))单击“DMU Kinematics(数字模型运动)”工具栏中的“Simulation with Command(使
用命令模拟)”按钮,弹出“Kinematics Simulation-Mechanism.1(运动模拟)”对话框,如图16-80所示。
在对话框中拖动滑标改变角度范围,如图16-81所示。
单击对话框中的“Play
forward(向前演示)”按钮,四缸内燃机开始运动。
图16-80 “Kinematics Simulation- 图16-81 改变角度范围
Mechanism.1(运动模拟)”对话框。
CATIA运动分析⽅法运动分析的⼀般步骤运动分析在Catia V5 R12中的DMU Kinematics模块下的⼀般步骤1.创建机构运动分析不是针对单个实体的分析,⽽是针对⼀个或多个机构的分析,所以应该先确定⼀个机构。
通常先确定⼀个固定件,否则机构是不能运动的。
点击Fixed Part命令,出现如下对话框:在⼏何模型区,或者树形图上选择想要固定的部件,这时定义好的机构⾃动出现在树形图上。
2.定义约束依据下表选择合适正确的运动副。
RollSlidePointPointJointJoint⼀个机构要想运动,通常会有⼀个或多个驱动,具体要根据机构形式⽽定。
可以在第⼆步定义约束的同时进⾏驱动命令的定义。
例如对于圆柱副,既可以定义⾓度驱动,⼜可以定义长度驱动,或者同时定义⾓度驱动和长度驱动。
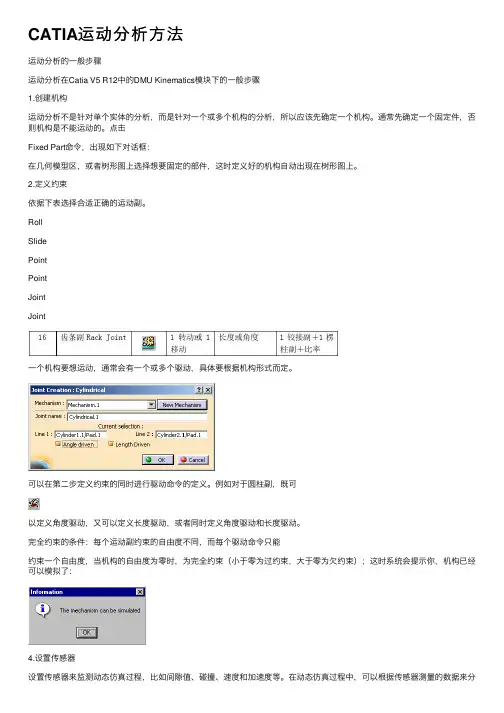
完全约束的条件:每个运动副约束的⾃由度不同,⽽每个驱动命令只能约束⼀个⾃由度,当机构的⾃由度为零时,为完全约束(⼩于零为过约束,⼤于零为⽋约束);这时系统会提⽰你,机构已经可以模拟了:4.设置传感器设置传感器来监测动态仿真过程,⽐如间隙值、碰撞、速度和加速度等。
在动态仿真过程中,可以根据传感器测量的数据来分析检查样机的设计情况。
常⽤以下⼏个命令Clash (碰撞分析);Distance & Band Analysis (距离和区域分析);Speed and Acceleration (速度和加速度测量)等。
(1)距离和区域分析:⽤于测量⼀个组内或者两个组内物体之间的最⼩距离。
在装配或运动分析中还可以进⾏动态测量。
点击命令: Name :⾃定义名称或者选择默认名称;Type :测量类型,⼀共有5种;Mimimum ,Along X ,Along Y ,Along Z ,Band Analysis 定义驱动命令计算类型,有三种;Between two selection 在两个选择物体之间;Inside one selection 在⼀个选择物体之内;Selection Against All 选择物体与所有未选择的物体之间。
运动分析的一般步骤运动分析在Catia V5 R12中的DMU Kinematics模块下的一般步骤1.创建机构运动分析不是针对单个实体的分析,而是针对一个或多个机构的分析,所以应该先确定一个机构。
通常先确定一个固定件,否则机构是不能运动的。
点击Fixed Part命令,出现如下对话框:在几何模型区,或者树形图上选择想要固定的部件,这时定义好的机构自动出现在树形图上。
2.定义约束依据下表选择合适正确的运动副。
RollSlidePointPointJointJoint一个机构要想运动,通常会有一个或多个驱动,具体要根据机构形式而定。
可以在第二步定义约束的同时进行驱动命令的定义。
例如对于圆柱副,既可以定义角度驱动,又可以定义长度驱动,或者同时定义角度驱动和长度驱动。
完全约束的条件:每个运动副约束的自由度不同,而每个驱动命令只能约束一个自由度,当机构的自由度为零时,为完全约束(小于零为过约束,大于零为欠约束);这时系统会提示你,机构已经可以模拟了:4.设置传感器设置传感器来监测动态仿真过程,比如间隙值、碰撞、速度和加速度等。
在动态仿真过程中,可以根据传感器测量的数据来分析检查样机的设计情况。
常用以下几个命令Clash (碰撞分析);Distance & Band Analysis (距离和区域分析);Speed and Acceleration (速度和加速度测量)等。
(1)距离和区域分析:用于测量一个组内或者两个组内物体之间的最小距离。
在装配或运动分析中还可以进行动态测量。
点击命令: Name :自定义名称或者选择默认名称;Type :测量类型,一共有5种;Mimimum ,Along X ,Along Y ,Along Z ,Band Analysis定义驱动命令计算类型,有三种;Between two selection 在两个选择物体之间;Inside one selection 在一个选择物体之内;Selection Against All 选择物体与所有未选择的物体之间。
第一章CATIAV5基础与工具第一章 CATIA V5基础与工具目录1产品介绍 (4)2图标功能介绍(基本概念、基本界面介绍) (4)2.1CATIA 用户界面 (4)2.2产品结构、文档与工作台(菜单工具组)Workbench (4)2.2.1基本操作工具栏(Standard Toolbar) (9)2.2.2视图工具栏(View Toolbar) (10)2.2.3图形特性工具栏(Graphic Properties Toolbar) (12)2.2.4测量工具栏(Measure Toolbar) (13)2.2.5标准库编辑器工具栏(Catalog Editor Toolbar) (13)2.2.6特征库编辑器工具栏(Feature Dictionary Editor T oolbar)(14)2.2.7知识工程工具栏(Knowledgeware Toolbar) (14)3软件环境设定(Customizing Settings) (15)3.1关于设置(About Settings) (15)3.2一般性设置(General) (18)3.2.1一般(General) (18)3.2.2显示(Display) (20)3.2.3兼容性(Compatibility) (32)3.2.4单位(Units) (40)3.2.5性能(Performances) (42)3.3架构(Infrastructure) (43)3.3.1缓存管理(Cache Management) (43)3.3.2材料库(Material Library) (45)3.3.3标准库编辑器(Catalog Editor) (48)4功能介绍(操作以及各项接口的使用) (48)4.1CATIA 模型存取 (48)4.1.1生成一个模型 (48)4.1.2读取一个模型 (49)4.1.3存储一个模型 (49)4.2CATIA元素选取 (49)4.2.1选择一个物体 (49)4.2.2选择多个物体 (49)4.3使用“搜索”命令选择对象(Selecting Using the Search... Command ).. (50)4.4关于显示的操作 (55)4.4.1设置显示模式( Rendering Styles) (55)4.4.2设置“显示”与“隐藏”(Hiding and Showing Objects) (56)4.4.3视图变换 (58)4.4.4通过管理CATIA Windows视图,可以使您从不同的视角显示三维物体。
第16章 CATIA 运动分析 16.1 曲轴连杆运动分析 四缸发动机曲轴、连杆和活塞的运动分析是较复杂的机械运动。曲轴做旋转运动,连杆左做平动,活塞是直线往复运动。在用CATIA作曲轴、连杆和活塞的运动分析的步骤如下所示。 (1) 设置曲轴、连杆、活塞及活塞销的运动连接。 (2) 创建简易缸套机座。 (3) 设置曲轴与机座、活塞与活塞缸套之间的运动连接。 (4) 模拟仿真。 (5) 运动分析。
16.1.1 定义曲轴、连杆、活塞及活塞销的运动连接 1.新建组文件 (1)点击“开始”选取“机械设计”中的“装配件设计”模块,如图16-1所示。
图16-1 进入“装配件设计”模块 (2)进入装配件设计模块后,点击添加现有组件图标,再点击模型树上的Product1图标,此时会出现文件选择对话框,按住Ctrl键,分别选取“Chapter16/huo-sai-xiao.CATPart、huo-sai.CATPart 、lianganzujian.CATproduct、quzhou.CATpart”,将这些零件体载入到Product1中。
(3)此时,零件体载入后重合到一起,点击分解图标,出现分解对话框如图16-2所示。然后点击模型树上的Product1,点击确定,此时弹出警告对话框,如图16-3所示,警告各零件的位置会发生变,点击警告对话框的按钮“是”,我们会发现各个零件分解开来。 图16-2 分解对话框 图16-3 警告对话框 (3)由于连杆体零件是装配体,各部分之间存在约束,点击“全部更新”按钮,我们会发现连杆体组件恢复装配后的样子。
(4)点击“约束”工具栏中的“相合约束”图标,分别选择活塞销中心线及活塞孔中心线,如图16-4所示。然后点击“约束”工具栏中的“偏移约束”图标,选择活塞销的一个端面及活塞孔一侧的凹下去细环端面,如图16-5所示,此时出现“约束属性”对话框,如图16-6所示。将对话框中的“偏移”一栏改为“3.75mm”,点击“确定”按钮,
完成活塞销端面和活塞内凹孔细环端面之间的偏移约束关系。点击“全部更新”按钮,完成活塞与活塞销之间的约束,如图16-7所示。自此完成添加零部件工作。
图16-4 选择活塞销中心线及活塞孔中心线 图16-5活塞销及活塞内凹孔的端面约束
图16-6将对话框中的偏移一栏改为3.75mm 图16-7 完成活塞及活塞销的约束
2. 设置连杆体与活塞销的运动连接 (1)点击“开始”选取“数字模型”中的“DMU Kinematics(数字模型运动)”模块,进入模型运动工作台,如图16-8所示。
图16-8 进入“DMU Kinematics”模块
(2)单击“DMU Kinematics(数字模型运动)”工具栏中的“Revolnte Joint(旋转铰)”
按钮右下方的箭头,出现“Kinematics Joint(运动饺)”工具栏,包括所有铰定义按钮,如图16-9所示。
图16-9 “Kinematics Joint(运动饺)”工具栏 (3)单击“Kinematics Joint(运动饺)”工具栏中的“Revolnte Joint(旋转铰)”按钮,弹出“Joint Creation: Revolute(生成旋转铰)”对话框,如图16-10所示。
图16-10 “Joint Creation: Revolute(生成旋转铰)”对话框 (4)单击对话框中的“New Mechanism(新运动机构)“按钮弹出“Mechanism Creation(生成运动机构)”对话框,如图16-11所示。单击对话框中的“确定”按钮,按照对话框中的默认机构名称“Mechanism.1”生成新的运动机构。同时“Mechanism Creation(生成运动机构)”对话框被关闭,回到“Joint Creation:Revolute(生成旋转铰)”对话框。
(5)在连杆体零件中选择小孔中心线(注意这里选择的应是连杆体小孔中衬套的中心线,因为与活塞销进行运动接触的是衬套),在选择活塞销的中心线,如图16-12所示。在连杆体零件中选择小孔衬套的一个端面,在活塞组件中选择活塞销的一个端面,如图16-13所示,在“Joint Creation:Revolute(生成旋转铰)”对话框中点选“Centered(居中)”单选扭,然后选择小孔衬套和活塞销的另外一侧端面,如图16-14所示。此时“Joint Creation:Revolute(生成旋转铰)”对话框的各项内容如图16-15所示。单击对话框中的“确定”按钮,生成旋转铰。零件按铰配合在一起,同时在模型树中出现和铰的名称,如图16-16所示。
图16-11 “Mechanism Creation”对话框 图16-12 选择衬套和活塞销中心线
图16-13 选择衬套和活塞销的一个端面
图16-14 选择衬套和活塞销的另一个端面
图16-15 “Joint Creation:Revolute(生成旋转铰)”对话框的各项内容 图16-16 模型树上出现机构和铰的名称 3.设置活塞销与活塞之间的运动连接 (1)实际中,活塞与活塞销之间为过盈配合,所以这里我们把活塞与活塞销之间定为刚性连接。单击“DMU Kinematics(数字模型运动)”工具栏中的“Revolnte Joint(旋转铰)”
按钮右下方的箭头,出现“Kinematics Joint(运动饺)”工具栏。
(2)单击“Rigid Joint(刚性连接)”按钮,弹出“Joint Creation:Rigid(生成刚性连接)”对话框,如图16-17所示。
图16-17 “Joint Creation:Rigid(生成刚性连接)”对话框 (3)在图形区上分别选择活塞销和活塞,“Joint Creation:Rigid(生成刚性连接)”对话框内容被更新,显示出所选择的零件名称,如图16-18所示。
图16-18 对话框显示出所选择的零件名称 (4)单击对话框中的“确定“按钮,生成刚性连接。零件刚性连接配合在一起。同时在模型树上出现刚性铰的名称。如图16-19所示。 图16-19 模型树上出现刚性铰的名称 4.设置连杆体与曲轴的运动连接 (1)单击“Kinematics Joint(运动饺)”工具栏中的“Revolnte Joint(旋转铰)”按钮,弹出“Joint Creation: Revolute(生成旋转铰)”对话框,在连杆体零件中选择大孔中心线(注意这里选择的应是连杆体大孔中轴瓦的中心线,因为与曲轴进行运动接触的是轴瓦),在选择曲轴的第一段的中心线,如图16-20所示。在连杆体零件中选择大孔轴瓦的一个端面,在曲轴中选择曲轴第一段的一个端面,如图16-21所示,在“Joint Creation:Revolute(生成旋转铰)”对话框中点选“Centered(居中)”单选扭,然后选择大孔轴瓦和曲轴第一段的另外一侧端面,如图16-22所示。此时“Joint Creation:Revolute(生成旋转铰)”对话框的各项内容如图16-23所示。单击对话框中的“确定”按钮,生成旋转铰。零件按铰配合在一起,同时在模型树中出现旋转铰的名称,如图16-24所示。
图16-20 选择连杆体大孔中轴瓦的中心线与曲轴的第一段的中心线
图16-21 选择大孔中轴瓦的一个端面与曲轴第一段的一个端面
图16-22 选择大孔轴瓦和曲轴第一段的另外一侧端面
图16-23 “Joint Creation:Revolute(生成旋转铰)”对话框的各项内容 图16-24 在模型树中出现旋转铰的名称 (6)此时完成了曲轴与一个连杆体的运动连接,连接后的整体约束图如图16-25所示。 图16-25 整体部件的连接图 5.完成其余三组活塞、活塞销、连杆体及曲轴的运动连接 (1) 点击“开始”再次选取“机械设计”中的“装配件设计”,进入“装配件设计”模块。点击“快速多实例化”按钮,然后在模型树上点击活塞零件,如图16-26所示。此时在零部件上有一个新的活塞零件生成,如图16-27所示。
图16-26 在模型树上点击活塞零件体 图16-27 新的活塞零件生成 (2)按照(1)中的快速生成实体的方法分别生成新的活塞销与连杆体零件,生成后的零件如图16-28,同时在模型树上出现新的零件体,如图16-29所示。 图16-28 生成新的活塞销与连杆体零件 图16-29 模型树上出现新的零件体 (3)由于零件体重合在一起,点击“分解”按钮,出现“分解”对话框,在模型树上点击Product.1,然后点击“确定”按钮。这时会出现警告对话框,继续点击“确定”按钮,完成重合零部件体的分解。
(4)由于先前已完成对第一组活塞、活塞销、连杆体及曲轴的运动关系的连接,第一组零部件间存在约束,点击“全部更新”按钮后,它们又恢复到先前的位置关系,但第二组零件被分离开来,如图16-30所示。
图16-30 分离更新后的效果图 (5))点击“约束”工具栏中的“相合约束”图标,分别选择新生成的活塞销中心线及活塞孔中心线,如图16-31所示。然后点击“约束”工具栏中的“偏移约束”图标,选择活塞销的一个端面及活塞孔一侧的凹下去细环端面,如图16-32所示,此时出现“约束属性”对话框,如图16-33所示。将对话框中的“偏移”一栏改为“3.75mm”,点击“确定”按钮完成活塞销端面和活塞内凹孔细环端面之间的偏移约束关系。点击“全部更新”按钮
,完成活塞与活塞销之间的约束,如图16-34所示。自此完成添加新零部件的工作,如图16-35所示。
图16-31选择活塞销中心线及活塞孔中心线 图16-32活塞销及活塞内凹孔的端面约束
图16-33将对话框中的偏移一栏改为3.75mm 图16-34完成活塞及活塞销的约束