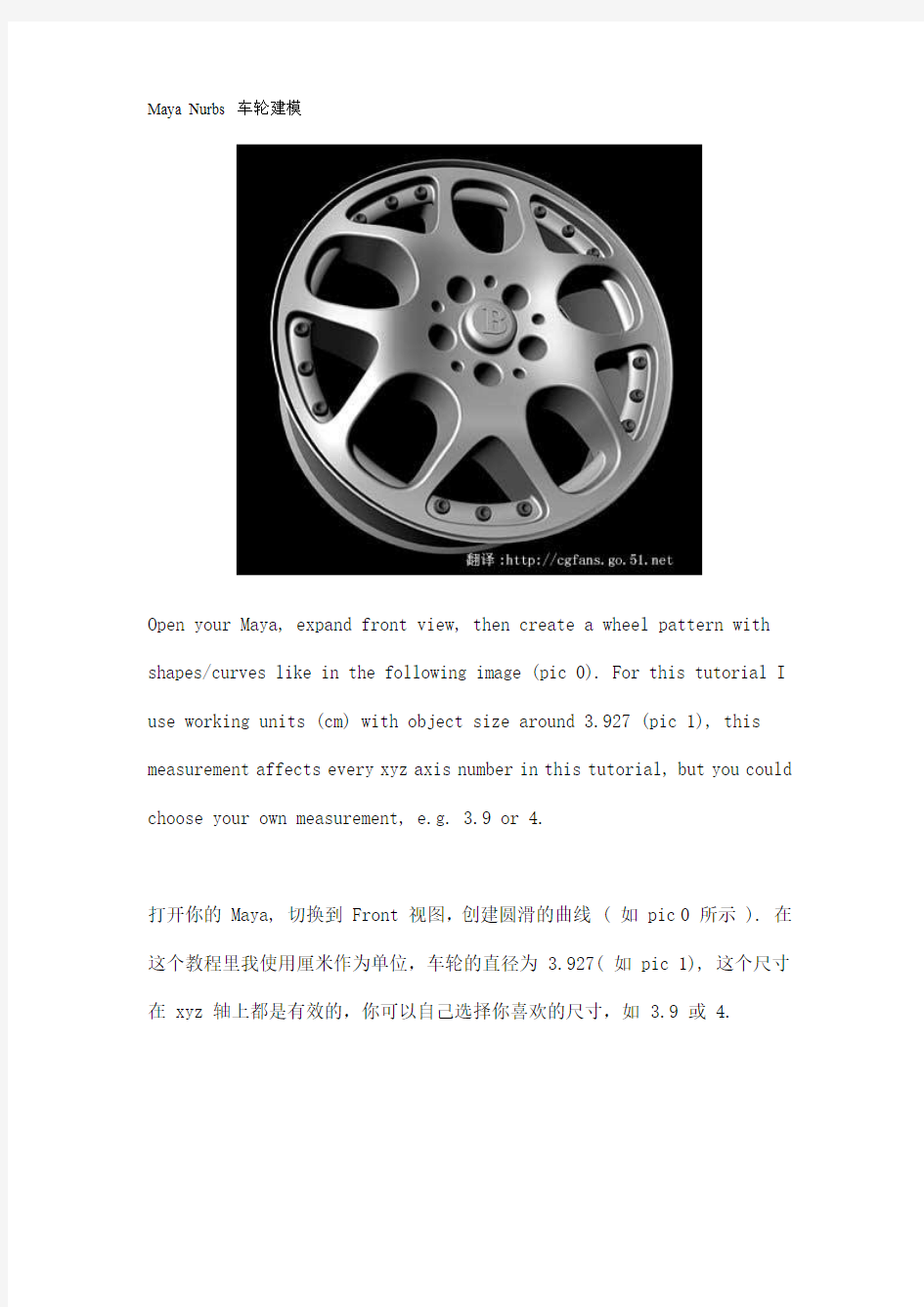
Maya Nurbs 车轮建模
Open your Maya, expand front view, then create a wheel pattern with shapes/curves like in the following image (pic 0). For this tutorial I use working units (cm) with object size around 3.927 (pic 1), this measurement affects every xyz axis number in this tutorial, but you could choose your own measurement, e.g. 3.9 or 4.
打开你的 Maya, 切换到 Front 视图,创建圆滑的曲线 ( 如 pic 0 所示 ). 在这个教程里我使用厘米作为单位,车轮的直径为 3.927( 如 pic 1), 这个尺寸在 xyz 轴上都是有效的,你可以自己选择你喜欢的尺寸,如 3.9 或 4.
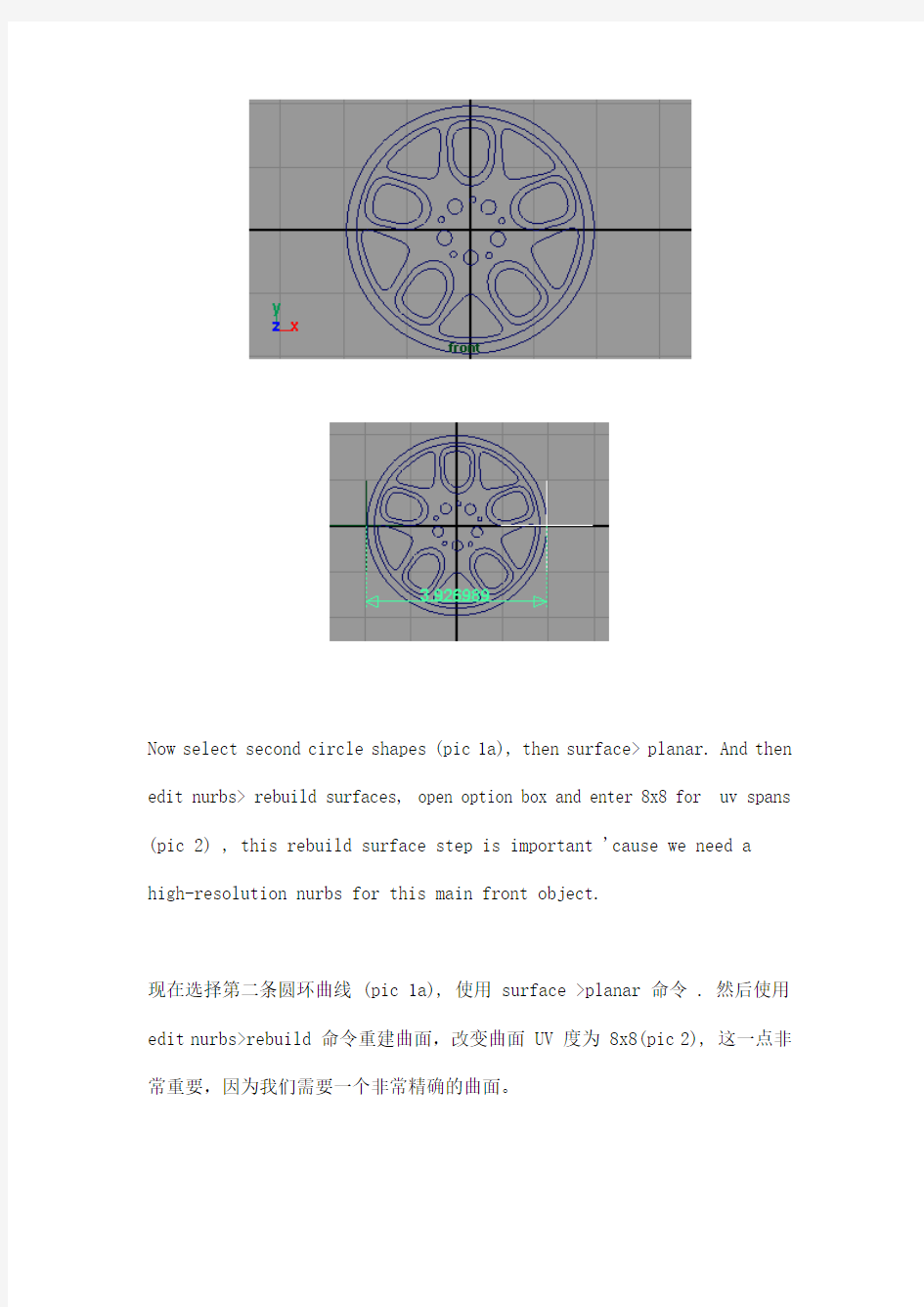
Now select second circle shapes (pic 1a), then surface> planar. And then edit nurbs> rebuild surfaces, open option box and enter 8x8 for uv spans (pic 2) , this rebuild surface step is important 'cause we need a high-resolution nurbs for this main front object.
现在选择第二条圆环曲线 (pic 1a), 使用 surface >planar 命令 . 然后使用edit nurbs>rebuild 命令重建曲面,改变曲面 UV 度为 8x8(pic 2), 这一点非常重要,因为我们需要一个非常精确的曲面。
From front view select these outer cv's (pic 3) then drag to -z axis (pic 4), -z value its about -0.235. You could expand your cv information on the right panel to see the value.
在 Front 视图里选择 CV 点 (pic 3) 将其在 -z 轴方向拉伸 (pic 4), 数值约为 -0.235. 你可以在 Channel box 里看到这一数值。
Select these 9 center cv's (pic 5) and drag also to -0.235 -z axis (pic 6).
选择 9 个 CV 点 (pic 5) 将其在 -z 轴上拉 -0.235 的距离 (pic 6).
Select these oval shapes (pic 7) and drag to about -0.46 of -z axis (pic 8).
选择那些卵形的曲线 (pic 7) ,并在 -z 轴上移动 -0.46(pic 8).
Now you have front oval shapes (bigger) and oval back shapes (smaller) right? OK now select every set of oval shapes like in pic 9 and loft them (every set of them), then it would look like this pic (pic 10).
先选择大的卵形曲线,按住 Shift 键选择小形卵形曲线 (pic 9) ,一组一组的Loft 它们,然后就可得到如下图的结果 (pic 10).
Now select the other shapes (triangle and small shapes in the center) (pic
11) and then extrude them to -0.5 of -z axis (pic 12). remember : to extrude
a curve as nurbs, open your extrude option box and set the style to distance, and make sure output geometry has been set to nurbs
现在选择其它曲线 ( 三角形和中心那些小圆 )(pic 11), 然后在 -z 轴上Extrude -0.5 的距离 .
记住 : Extrude 出来是应该椒 Nurbs 曲面,打开你的 Extrude 选项,设定距离并确定输出的几何体为 Nurbs 曲面 .
Before entering this fillet & trim work, there is something important that we should know about preview resolution (antialias settings) and tessellation smoothness within Maya.
在进入 fillet 及 trim 的工作之前,有一些很重要的事情我们应该了解一下Maya 的镶嵌的圆滑设置 .
Most of new Maya users are shy of this nurbs gaps that are caused by fillet & trim works.
很多的使用 Maya 的人都会造成此类现象。
When using nurbs with lots of fillet & trim works, it is important to preview the scene with production quality on render globals. Even if it's just a preview, production quality has soft multi-pixel filtering. Anti-alias is important for nurbs with Fillet & Trim in Maya. In this case, I am not talking about rebuilding the surfaces, but we could use smooth anti-alias combined with better tessellation settings to close the gaps.
当你在使用 Nurbs 做一些 Fillet 和 Trim 的工作时,在全局渲染里将预视图设为产品质量 (Production Quality) 是很重要的 . 虽然它只是预视图,产品质量 (Production quality) 可以圆滑缝合点 . 抗锯齿 (Anti-alias) 在Maya 里的设置,对 Fillet 和 Trim Nurbs 表面也是同样重要 . 在这种情况下,我不是想说要重建表面,我们可以通过对抗锯齿的设置来改善它 .
Ok its about resolution preview, now about the tessellation problem, you can choose one of these 3 options or play around with each settings :
让我们谈谈镶嵌的问题,你可以选择这 3 个选项中的一个或三个都选来设置 :
1. Before circular filleting an object, be sure your Positional Tolerance (in Circular Fillet option box) has been set to minimal value for better tessellation between two surfaces, you could set it to 0.010 (the default is 0.0100), and also you can change the tangent Tolerance to about 0.0100, with this option and value, Maya will create more tight connection between
two surfaces.
1. 在 Circular Fillet 物体前,确认你的 Positional Tolerance( 在Circular Fillet 选项里 ) 是否已经设置到最小的值,以便在两个要 Fillet 的曲面中得到最好的结果,你可以设为 0.010( 缺省就是 0.010), 同样你也可以将 Tangent Tolerance 设为 0.0100, 在这种设置下, Maya 可以在严谨的连
接两个曲面 .
2. Maya has built-in automatic nurbs tessellation check located in the render menu. If you want to render your nurbs scene, all you have to do is select all of your nurbs objects, go to the render menu and select set nurbs tessellation, apply this function, then render the scene, it will
reduce the gaps automatically. This feature evaluates a set frame (s) and automatically determines the optimum tessellation settings, which results in smoother surfaces without over-tessellation (of course this
saves time and memory).
2.Maya 会自动创建 Nurbs 曲面的镶嵌,你可以在 render menu 里查看它 . 如果你想渲染你的 Nurbs 场景,你必需要做的是选择你所有的 Nurbs 物体,到你的 render menu 里设置 Nurbs 镶嵌,然后渲染场景,它可以减少缝隙 . 它会增加你的渲染时间和内存,但是可以使你的曲面平滑 .
3. Every time you're finished with fillet & trim, select your trimmed & filleted objects and set/turn on Advanced Tessellation and set number of UV to 20x20 (pic 14), and again, don't forget to set your render globals to production quality. It doesn't have to be 20x20, but I have found these to be good settings, but be carefull with this settings, the surfaces would very very smooth which increasing your rendering times.
3. 当你每次完成 Fillet 和 Trim 操作,选择已被 Fillet 和 Trim 过的物体设置它们的 Advanced Tessllation 属性,将 UV 设为 20x20(pic 14), 不要忘记在全局渲染里设置产品质量 . 虽然不一定要到 20x20, 但是我认为这是一个比较好的数值 , 请你注意使用这个方法,它会增加你的渲染时间 .
4. Worst case; you can also add new lofted surface by lofting isoparm and trimmed surfaces
between two separated surfaces
4. 如果遇上很糟糕的情况,你可以在两个表面连接的地方之间增加你的
Isoparm.
But i suggest you to use no.1 and no.2
但我认为你会使用 No.1 和 No.2 来改善这种情况 .
Anyway...please...don't be to much worried about these gaps/space ..:)
--- 不要太担心这种情况 .
----------------------------------------------- Ha...still with me guys ?.....ok..let's continue our wheel lesson
Circular Fillet & Trim (part 1)
Important : You must turn on create curve on surface on Circular Fillet Option box, otherwise you cannot trim the surface.
重要 : 在你 Circular Fillet 时,一定要在选项框中选择在表面创建曲线,否
则你将不能剪切曲面 .
To Circular Fillet, select lofted/extruded object first, then select main body object, then circular fillet it, this would help us to remember the last settings of circular fillet directions.
Cirular Fillet 前,先选择 Loft/Extrude 的曲面,然后再选择主要的面,circular Fillet 它们,这样会让我们记得 circular fillet 的方向 .
Start circular fillet; in this case, I started with extruded triangle in the upper right area (pic 15). For this triangle, put a circular fillet with value of -0.03 on normal fillet direction (this circular fillet direction could be different, it depends on your U and V direction). Here's after circular fillet and trim (pic 16)
开始 Circular fillet: 在这里,我首先 circular 三解形曲面 (pic 15). 我将 Circular fillet 的值设为 -0.03( 有可能 circular fillet 的值会设为另一方向,如 0.03 ,这取决于你的曲面 U 和 V 的方向 ).(pic 16) 是 Circular
fillet 后 trim 出来的结果 .
Note : if your measurement is bigger than this tutorial, than use a higher
value; as I said in the beginning of this tutorial that measurement affects every xyz and of course this fillet value as well.
记住 : 如果你发现你的尺寸大了,那么使用一个更小的值 ; 我想说的是,在开
始做之前,应该检查它们的尺寸。
Next fillet and trim the oval lofted object, for this oval lofted object fillet, use reverse primary surface normal with radius of -0.03, (pic 17)
接下来 fillet 和 trim 卵形的曲面,我将 fillet 的值设为 -0.03.(pic 17).
Do the same steps with the same settings for the other extruded and lofted objects (except inner objects or small extruded objects) bellow.
然后重复 circular 并 trim 这些三角形及卵形曲面 ( 中间的圆形曲面后面再
做 ).
Cirucular Fillet & Trim 2
For these small cylinder objects (pic 18) use reverse primary surface normal with value of -0.30 for bigger cylinders and -0.20 for smaller
cylinders.
在 circular 比较大的圆形曲面时,我取值为 -0.30, 小的取值为 -0.20.
Create cap for logos
创建车轮盖子
From front view, create a nurbs cylinder and rescale it to 0.234 (xyz), rotate it to 90° , drag to the center of the objects (pic 19) and translate -z axis to -0.235 (pic 20).
在前视窗中,创建一个圆柱体并将它的尺寸在 xyz 轴缩小到 0.234, 旋转 90 度 , 并将它移动到物体的中心 (pic 19) ,然后在 -z 轴上移动 -0.235 的距离 (pic 20).
Adjust the front cv's until they look like in the following image (pic 21), then select outter isoparm then surfaces > planar to close the cap (pic 22).
调整前面的 CV 点到如 (pic 21) 的效果,调整好后,选择最外面的 Isoparm 线,使用 Surfaces>Planar 命令闭合这个车轮盖子 (pic 22).
Next, you need to fillet the cap body with a value of 0.030 ( normal fillet direction ) (pic 23).
接下的,你需要 fillet 盖子, circular fillet 的值为 0.030(pic 23).
OK, now you can hide all helper curves/shapes, select all objects and apply
a default Phong-E Material as soft steel and set the main color to just
a little bit brighter than default (i.e. V=0.678) on HSV color sliders :) Ok, 现在你可以将所有的补助线隐藏起来,选择所有物体,并给它们一个缺省的PhongE 材质,调整 PhongE 材质的主颜色 (Main color) ( 在 HSV 色板上 V 的
取值约为 0.678).
final check before render :
渲染前的检查 :
Select edit > Select all by type > NURBS surfaces , go to rendering module, go to render > set NURBS tessellation > option box , set the curvature tolerance to highest value , set the U and V Division Factor to 5, then hit set and close.
edit > Select all by type > NURBS surfaces , 到 rendering module , 再
到 render > set NURBS tessellation > option box , 将 curvature tolerance 设为 highest value , 将 U 和 V Division Facto 设为 5, 然后 set and close .
Be sure your render global has been set to Production Quality (and raytracing if you want). Now render it, you should have this lovely nurbs...
确认你在全局渲染的设置里设置为产品质量 ( 还有光线跟踪 -- 如果你想的话 ), 然后渲染它,你将得到 ....
ooohh mommyyyy....its a Brabussss...!!!
Nurbs建模学习 一、关于Nurbs Nurbs建模技术在设计与动画行业中占有举足轻重的地位,一直以来是国外大型三维制作公司的标准建模方式,如pixar,PDI,工业光魔等,国内部分公司也在使用Nurbs建模。他的优势是用较少的点控制较大面积的平滑曲面,以建造工业曲面和有组织的流线曲面见长。而且Maya在特效,贴图方面对nurbs的支持比较充分,使用nurbs模型在后续工作中会很方便。 不过nurbs对拓扑结构要求严格,在建立复杂模型时会比较麻烦,这需要我们耐心的学习。 二、Loft放样 作画时,固有色和环境色是两个非常重要的概念。物体真正的固有色只有在没有任何环境影响,无投影的白色柔和光照下,才能被我们确定。而我们平常所看到的物体大多被随意放置在一定的环境中,…… Loft是最常用的曲面工具之一,我们可以通过几条曲线描述物体的外形,然后放样生成表面。 Loft 放样。 创建一系列的曲线定义物体的形状,然后一起放样这此曲线就象在一个框架上蒙上画布一样。这些曲线可以是表面上的曲线、表面等位结构线或剪切曲线。使用放样来建立表面时,应该保证所有参加放样的截面曲线的CV点的数目一样,下就是当你建立完曲线后进行一次Surface/Rebuild将曲线重建使CV点统一,这样生成的曲面就会显得整齐,而且很方便以后调整外形。需要要注意一点就是在放样前,选择曲线的顺序,这个操作决定了你放样后形成的面。
Parameterization 改变放样参数,Uniform 结点距离,用使轮廓曲线与V 方向平等,结果表面U 方向上的参数值等间距,第一条轮廓曲线和表面上的U (0,0)处的等位结构线对应,第二条和U (1,0)对应以次类推。 Chord Length 间距,结果表面U 方向上的参数值会根据轮廓曲线起点间的距离而定。 Rebuild 后 Rebuild 前
控制工程与仿真课程设计报告 报告题目直线一级倒立摆建模、分析及控制器的设计 组员1专业、班级14自动化1 班姓名朱永远学号1405031009 组员1专业、班级14自动化1 班姓名王宪孺学号1405031011组员1专业、班级14自动化1 班姓名孙金红学号1405031013 报告评分标准 评分项目权重评价内容评价结果项目得分 内容70设计方案较合 理、正确,内容 较完整 70-50分 设计方案基本合 理、正确,内容 基本完整 50-30分 设计方案基本不 合理、正确,内 容不完整 0-30分 语言组织15语言较流顺,标 点符号较正确 10-15分语言基本通顺, 标点符号基本正 确 5-10分 语言不通顺,有 错别字,标点符 号混乱 5分以下 格式15 报告格式较正 确,排版较规范 美观 10-15分 报告格式基本正 确,排版不规范 5-10分 报告格式不正 确,排版混乱 5分以下总分
直线一级倒立摆建模、分析及控制器的设计 一状态空间模型的建立 1.1直线一级倒立摆的数学模型 图1.1 直线一级倒立摆系统 本文中倒立摆系统描述中涉及的符号、物理意义及相关数值如表1.1所示。
图1.2是系统中小车的受力分析图。其中,N 和P 为小车与摆杆相互作用力的水平和垂直方向的分量。 图1.2 系统中小车的受力分析图 图1.3是系统中摆杆的受力分析图。F s 是摆杆受到的水平方向的干扰力, F h 是摆杆受到的垂直方向的干扰力,合力是垂直方向夹角为α的干扰力F g 。
图1.3 摆杆受力分析图 分析小车水平方向所受的合力,可以得到以下方程: ()11- 设摆杆受到与垂直方向夹角为α 的干扰力Fg ,可分解为水平方向、垂直方向的干扰力,所产生的力矩可以等效为在摆杆顶端的水平干扰力FS 、垂直干扰力Fh 产生的力矩。 ()21- 对摆杆水平方向的受力进行分析可以得到下面等式: ()θsin 22 l x dt d m F N S +=- ()31- 即: αθθθθsin sin cos 2f F ml ml x m N +-+= ()41- 对图1.3摆杆垂直方向上的合力进行分析,可以得到下面方程: ()θcos 22 l l dt d m F mg P h -=++- ()51- 即 θθθθ αcos sin cos 2 ml ml F mg P g +=++- ()61- 力矩平衡方程如下: 0cos sin sin cos cos sin =++++θθθθαθα I Nl Pl l F l F g g ()71- 代入P 和N ,得到方程: () 0cos 2sin sin 2cos sin cos 2cos sin 2222=+-++++θθθθθθθαθαx ml ml mgl ml I l F l F g g ()81- 设φπθ+=,(φ是摆杆杆与垂直向上方向之间的夹角,单位是弧度),代入上式。假设φ<<1,则可进行近似处理: φφφφφφφ===?? ? ??==2sin ,12cos ,0,sin ,1cos 2 dt d N x f F x M --= α sin g S F F =α cos g h F F =
(研究生课程论文) 汽车动力学 论文题目:汽车悬架系统动力学研究指导老师:乔维高 学院班级: 学生姓名: 学号: 2015年1月
汽车悬架系统动力学研究 摘要:汽车悬架类型的选择和悬架参数的差异对汽车的操纵稳定性和行驶平顺性具有重要的影响。主要分析了麦弗逊悬架的结构特点,并通过ADAMS软件建立麦弗逊悬架的3D模型,对其进行仿真分析,得出悬架参数的优化设计方法。关键词:麦弗逊悬架;ADAMS多刚体动力学;仿真分析 The automobile suspension system dynamics research Caisi Vehicle 141 1049721402344 Abstract:Different kinds of suspension systems and of differences in suspension parameters on the vehicle steering stability and riding comfort have important influence. Mainly analyzed the structure characteristics of Macpherson suspension, and by using ADAMS software to establish 3D model of Macpherson suspension, carry on the simulation analysis, the method of optimal design parameters of the suspension. Key words:Macpherson suspension; ADAMS /Car; multi-rigid-body dynamics; simulation and analysis 引言 汽车悬架是汽车车轮与车身之间一切装置的总称。其功用在于:在垂直方向能够衰减振动和起悬挂作用;在侧向可防止车身侧倾和左右车轮载荷转移;在行驶方向上能够保证驱动与制动的实现并保持行驶方向的稳定性。不同的悬架设置会使驾驶者有不同的感受。看似简单的悬架系统综合多种作用力,决定着轿车的稳定性、舒适性和安全性,是现代轿车十分关键的部件之一。悬架系统起着传递车轮和车身之间的力和力矩、引导与控制汽车车轮与车身的相对运动、缓和路面传递给车身的冲击、衰减系统的振动等作用,汽车悬架系统对汽车的操
倒立摆 倒立摆百度文库解释: 倒立摆系统的输入为小车的位移(即位置)和摆杆的倾斜角度期望值,计算机在每一个采样周期中采集来自传感器的小车与摆杆的实际位置信号,与期望值进行比较后,通过控制算法得到控制量,再经数模转换驱动直流电机实现倒立摆的实时控制。直流电机通过皮带带动小车在固定的轨道上运动,摆杆的一端安装在小车上,能以此点为轴心使摆杆能在垂直的平面上自由地摆动。作用力u平行于铁轨的方向作用于小车,使杆绕小车上的轴在竖直平面内旋转,小车沿着水平铁轨运动。当没有作用力时,摆杆处于垂直的稳定的平衡位置(竖直向下)。为了使杆子摆动或者达到竖直向上的稳定,需要给小车一个控制力,使其在轨道上被往前或朝后拉动。 倒立摆系统简介 倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。最初研究开始于二十世纪50 年代,麻省理工学院(MIT)的控制论专家根据火箭发射助推器原理设计出一级倒立摆实验设备。近年来,新的控制方法不断出现,人们试图通过倒立摆这样一个典型的控制对象,检验新的控制方法是否有较强的处理多变量、非线性和绝对不稳定系统的能力,从而从中找出最优秀的控制方法。倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展。由于控制理论的广泛应用,由此系统研究产生的方法和技术将在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射中的垂直度控制、卫星飞行中的姿态控制和一般工业应用等方面具有广阔的利用开发前景。平面倒立摆可以比较真实的模拟火箭的飞行控制和步行机器人的稳定控制等方面的研究。 倒立摆分类
辽宁工程技术大学 电力系统继电保护综合训练一 设计题目方向性电流保护的建模与仿真 指导教师刘健辰 院(系、部)电气与控制工程学院 专业班级电网13—1班 学号1305080116 姓名苏小平 日期2017/01/05
智能电网系综合训练标准评分模板
电力系统继电保护析综合训练一 任务书 本次综合训练目的在于通过对双侧电源电力系统的方向电流保护的建模与仿真,巩固和运用所学到的方向电流保护理论知识,掌握Matlab 仿真软件的使用方法,培养学生分析问题和解决问题的能力。 双侧电源电力系统结构图如下: 系统基本参数如下,线路长度和短路点位置见后面的班级数据表。 电源:o 11510kV M E =∠ ,o 1050kV N E =∠ ,o ,,0.22673.13s M s N Z Z ==∠Ω 线路:LGJ-240/40型架空线,单位正序阻抗o 10.45173.13/km z =∠Ω。 设计要求: 利用Matlab/Simulink 建立仿真模型,完成仿真计算,分析仿真结果。 设计说明书内容: 1、 任务书 2、 电网相间短路的方向电流保护原理 3、 利用Matlab/Simulink 建立仿真模型 4、 设置故障,完成仿真计算 5、 分析仿真结果 6、 重新设置两侧电源参数,分析对方向电流保护的影响
说明:1)1~7组每组3人;第8组4人。 2)将自己姓名填入表中
目录 一、综合训练目的 (1) 二、电网相间短路的方向电流保护原理 (1) 三、中性点不接地系统故障特征 (1) 四、仿真 (1) (1)、仿真模型 (2) (2)、设置故障、观察故障特征 (2) 五、结果分析 (3) 六、重新设置两侧电源参数,分析对方向电流保护的影响 (3) 参考文献 (4)
曲面建模应用实例 本章将介绍曲面建模的思路和方法,并且通过两个综合实例来详细介绍曲面设计过程。通过实例的讲解,读者可以熟悉曲面造型的一般思路和操作过程,从而深入掌握曲面造型的方法。 掌握曲面建模的思路和方法 掌握工程图纸的阅读方法 熟练掌握曲面造型中的常用命令
实例一:小汽车设计 这个例子通过设计小汽车模型来具体描述曲面造型的过程,最终结果如图1所示。 图 1 1.打开图形文件 启动UG NX8,打开文件“\part\surface modeling\ 1.prt”,结果如图2所示。 图 2 2.创建主片体 (1)创建曲面1。选择下拉菜单中的【插入】|【网格曲面】|【通过曲线组】命令,选
图 3 (2)创建曲面2。选择下拉菜单中的【插入】|【网格曲面】|【通过曲线组】命令,选择如图4所示的曲线来创建曲面。 图 4 (3)创建曲面3。选择下拉菜单中的【插入】|【网格曲面】|【通过曲线组】命令,选择如图5所示的曲线来创建曲面。 图 5 (4)创建曲面4。选择下拉菜单中的【插入】|【网格曲面】|【通过曲线组】命令,选择如图6所示的曲线来创建曲面。 图 6 (5)创建曲面5。选择下拉菜单中的【插入】|【网格曲面】|【通过曲线组】命令,选
图7 (6)创建曲面6。选择下拉菜单中的【插入】|【网格曲面】|【通过曲线组】命令,选择如图8所示的曲线来创建曲面。 图8 (7)创建曲面7。选择下拉菜单中的【插入】|【网格曲面】|【通过曲线组】命令,选择如图9所示的曲线来创建曲面。 图9 3创建过渡片体 (8)创建曲面8 。隐藏曲面3、曲面4。选择下拉菜单中的【插入】|【细节特征】|【桥接】命令,桥接曲面2、曲面5,结果如图10所示。
系统建模 系统建模可以分为两种:机理建模和实验建模.实验建模就是通过在研究对象上加上一系列的研究者先确定的输入信号,激励研究对象并通过传感器的检测其可观测的输出,应用数学手段建立起系统输入---输出关系.这里包括输入信号的设计选取,输出信号的精确检测,数学算法的研究等等内容.机理建模就是在了解研究对象在运动规律基础上,通过物理,化学的知识和数学手段建立起的系统内部的输入输出状态关系.系统的建模原则: 1) 建模之前,要全面了解系统的自然特征和运动机理,明确研究目的和准确性要求,选择合适的分析方法。 2) 按照所选分析法,确定相应的数学模型的形式; 3) 根据允许的误差范围,进行准确性考虑,然后建立尽量简化的合理的数学模型。 小车—倒立摆系统是各种控制理论的研究对象。只要一提小车—倒立摆系统,一般均认为其数学模型也已经定型。事实上,小车—倒立摆的数学模型与驱动系统有关,常见到的模型只是对应于直流电机的情况,如果执行机构是交流伺服电机,就不是这个模型了。本文主要分析由直流电机驱动的小车—倒立摆系统。小车倒立摆系统是检验控制方式好坏的一个典型对象,其特点是高阶次、不稳定、非线性、强耦合,只有采取有效的控制方式才能稳定控制. 在忽略空气阻力,各种摩擦之后,可将直线一级倒立摆系统抽象成小车忽然均匀质杆组成的系统,如下图所示: 图中F 是施加于小车的水平方向的作用力,x 是小车的位移,φ是摆的倾斜角。若不给小车施加控制力,倒摆会向左或向右倾斜,控制的目的是当倒摆出现偏角时,在水平方向上给小车以作用力,通过小车的水平运动,使倒摆保持在垂直的位置。即控制系统的状态参数,以保持摆的倒立稳定。 M 小车的质量 0.5Kg m 摆杆的质量 0.2Kg X φ F M 图1 直线一级倒立摆系统 θ
XX大学 现代控制理论 ——汽车半主动悬架系统的建模与分析 姓名:XXX 学号:XXXX 专业:XXXX
一. 课题背景 汽车的振动控制是汽车设计的一个重要研究内容,涉及到汽车的平顺性和操纵稳定性。悬架系统是汽车振动系统的一个重要子系统,其振动传递特性对汽车性能有很大影响。因此设计性能良好的悬架系统以减少路面激励的振动传递,从而提高汽车的平顺性和操纵稳定性是汽车振动控制研究的重要课题。 悬架系统是汽车车身与轮胎间的弹簧和避震器组成整个支撑系统,用于支撑车身,改善乘坐舒适度。而半主动悬架是悬架弹性元件的刚度和减振器的阻尼系数之一可以根据需要进行调节控制的悬架。 目前,半主动悬架研究主要集中在调节减振器的阻尼系数方面,即将阻尼可调减振器作为执行机构,通过传感器检测到汽车行驶状况和道路条件的变化以及车身的加速度,由ECU 根据控制策略发出脉冲控制信号实现对减振器阻尼系数的有级可调和无级可调。 二. 系统建模与分析 1.1 半主动悬架系统的力学模型 以二自由度 1/4半主动悬架模型为例,并对系统作如下假设: (1) 悬挂质量与非悬挂质量均为刚体; (2) 悬架系统具有线性刚度和阻尼; (3) 悬架在工作过程中不与缓冲块碰撞; (4) 轮胎具有线性刚度,且在汽车行驶过程中始终与地面接触。 综上,我们将该系统等效为两个质量块M ,m ;两个弹簧系统Ks ,Kt ;一个可调阻尼器(包含一个常规 阻尼器Cs 和一个变化阻尼力F ),如图1所示。 图1 系统力学模型 1.2 半主动悬架系统的数学模型 由减振器的简化模型得:N S =-+F C V F 对m 进行分析:()211201122()t s s d z dz dz m K z z K z z C F dt dt dt ?? =------ ??? 即:()()1011212()t s s mz K z z K z z C z z F =------ 对M 进行分析:2212122 ()s s d z dz dz M K z z C F dt dt dt ?? =-+-+ ??? 即:()()21212s s Mz K z z C z z F =-+-+
上海电力学院课程设计报告 课名:自动控制原理应用实践 题目:倒立摆控制装置 院系:自动化工程学院 专业:测控技术与仪器 班级:2011151班 姓名:马玉林 学号:20112515 时间:2014年1月14日
倒立摆系统按摆杆数量的不同,可分为一级,二级,三级倒立摆等,多级摆的摆杆之间属于自有连接(即无电动机或其他驱动设备)。对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。 倒立摆的控制问题就是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度。当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。 1.1 倒立摆的控制方法 倒立摆系统的输入来自传感器的小车与摆杆的实际位置信号,与期望值进行比较后,通过控制算法得到控制量,再经数模转换驱动直流电机实现倒立摆的实时控制。直流电机通过皮带带动小车在固定的轨道上运动,摆杆的一端安装在小车上,能以此点为轴心使摆杆能在垂直的平面上自由地摆动。作用力u平行于铁轨的方向作用于小车,使杆绕小车上的轴在竖直平面内旋转,小车沿着水平铁轨运动。当没有作用力时,摆杆处于垂直的稳定的平衡位置(竖直向下)。为了使杆子摆动或者达到竖直向上的稳定,需要给小车一个控制力,使其在轨道上被往前或朝后拉动。 本次设计中我们采用其中的牛顿-欧拉方法建立直线型一级倒立摆系统的数学模型,然后通过开环响应分析对该模型进行分析,并利用学习的古典控制理论和Matlab /Simulink仿真软件对系统进行控制器的设计,主要采用根轨迹法,频域法以及PID(比例-积分-微分)控制器进行模拟控制矫正。 2 直线倒立摆数学模型的建立 直线一级倒立摆由直线运动模块和一级摆体组件组成,是最常见的倒立摆之一,直线倒立摆是在直线运动模块上装有摆体组件,直线运动模块有一个自由度,小车可以沿导轨水平运动,在小车上装载不同的摆体组件。 系统建模可以分为两种:机理建模和实验建模。实验建模就是通过在研究对象上加上一系列的研究者事先确定的输入信号,激励研究对象并通过传感器检测其可观测的输出,应用数学手段建立起系统的输入-输出关系。这里面包括输入
开关电源的建模和环路补偿设计上 如今的电子系统变得越来越复杂,电源轨和电源数量都在不断增加。为了实现最佳电源解决方案密度、可靠性和成本,系统设计师常常需要自己设计电源解决方案,而不是仅仅使用商用砖式电源。设计和优化高性能开关模式电源正在成为越来越频繁、越来越具挑战性的任务。 电源环路补偿设计常常被看作是一项艰难的任务,对经验不足的电源设计师尤其如此。在实际补偿设计中,为了调整补偿组件的值,常常需要进行无数次迭代。对于一个复杂系统而言,这不仅耗费大量时间,而且也不够准确,因为这类系统的电源带宽和稳定性裕度可能受到几种因素的影响。本应用指南针对开关模式电源及其环路补偿设计,说明了小信号建模的基本概念和方法。本文以降压型转换器作为典型例子,但是这些概念也能适用于其他拓扑。本文还介绍了用户易用的LTpowerCAD设计工具,以减轻设计及优化负担。 确定问题 一个良好设计的开关模式电源(SMPS) 必须是没有噪声的,无论从电气还是声学角度来看。欠补偿系统可能导致运行不稳定。不稳定电源的典型症状包括:磁性组件或
陶瓷电容器产生可听噪声、开关波形中有抖动、输出电压震荡、功率FET 过热等等。 不过,除了环路稳定性,还有很多原因可能导致产生不想要的震荡。不幸的是,对于经验不足的电源设计师而言,这些震荡在示波器上看起来完全相同。即使对于经验丰富的工程师,有时确定引起不稳定性的原因也是很困难。图 1 显示了一个不稳定降压型电源的典型输出和开关节点波形。调节环路补偿可能或不可能解决电源不稳定问题,因为有时震荡是由其他因素引起的,例如PCB 噪声。如果设计师对各种可能性没有了然于胸,那么确定引起运行噪声的潜藏原因可能耗费大量时间,令人非常沮丧。 图1:一个“不稳定” 降压型转换器的典型输出电压和 开关节点波形 对于开关模式电源转换器而言,例如图 2 所示的 LTC3851 或LTC3833 电流模式降压型电源,一种快速确
一级倒立摆物理建模和传递函数的推导 设定: M 小车质量 m 摆杆质量 b 小车摩擦系数 l 摆杆转动轴心到杆质心的长度 I 摆杆惯量 F 加在小车上的力 x 车位置 φ 摆杆与垂直向上方向的夹角
图1、2是系统中小车和摆杆的受力分析图。其中,N 和P 为小车与摆杆相互作用。 分析小车水平方向所受的合力,可以得到以下方程: N x b F x M --=? ?? (1) 由摆杆水平方向的受力进行分析可以得到下面等式: )sin (22 θl x dt d m N += (2) 即: θθθθsin cos 2 ?? ???-+=ml ml x m N (3) 把这个等式代入式(3)中,就得到系统的第一个运动方程: F ml ml x b x m M =-+++?? ????θθθθsin cos )(2 (4) 对摆杆垂直方向上的合力进行分析,可以得到下面方程: )cos (2 2 θl dt d m mg P =- (5) θθθθcos sin 2 ?? ?--=-ml ml mg P (6) 力矩平衡方程: ? ?=--θθθI Nl Pl cos sin (7)
此方程中力矩的方向,由于φπθ+=,θφcos cos -=,θφsin sin -=,故等式前面有负号。 合并这两个方程,约去 P 和N ,得到第二个运动方程: θ θθcos sin )(2 ? ???-=++x ml mgl ml I (8) 设θ =π +φ, 假设φ 与1(单位是弧度)相比很小,即c <<1,则可以进行近似处理:1cos -=θ,φθ-=sin ,0)(2 =dt d θ。用u 来代表被控对象的输入力F ,线性化后两个运动方程如下: { u ml x b x m M x ml mgl ml I =-++=-+? ?? ? ?? ???φφφ)()(2 (9) 假设初始条件为0,对式(9)进行拉普拉斯变换: { ) ()()()()()()()()(22222s U s s ml s s bX s s X l M s s mlX s mgl s s ml I =Φ-++=Φ-Φ+ (10) 由于输出为角度φ ,求解方程组的第一个方程,可以得到: )(])([)(22s s g ml ml I s X Φ-+= (11) 或 mgl s ml I mls s X s -+=Φ2 22)()()( (12) 令? ?=x v ,则有: mgl s ml I ml s V s -+=Φ22)()()( (13) 把上式代入方程组的第二个方程,得到:
悬架系统开发流程---布置部分 目标设定BENCHMARK 在此主要是分析竞争车型的底盘布置。底盘布置首先要确定出轮胎、悬架形式、转向系统、发动机、传动轴、油箱、地板、前纵梁结构(满足碰撞)等,因为这些重要的参数,如轮胎型号、悬架尺寸、发动机布置、驱动形式、燃油种类等在开发过程中要尽可能早地确定下来。在此基础上,线束、管路、减振器、发动机悬置等才能继续下去 悬架选择 对各种后悬架结构型式进行优缺点比较,包括对后部轮罩间空间尺寸的分析比较,进行后悬架结构的选择。 常见的后悬架结构型式有:扭转梁式、拖曳臂式、多连杆式。 扭转梁式悬架 优点: 1.与车身连接简单,易于装配。 2.结构简单,部件少,易分装。 3.垂直方向尺寸紧凑。 4.底板平整,有利于油箱和后备胎的布置。 5.汽车侧倾时,除扭转梁外,有的纵臂也会产生扭转变形,起到横向稳定作用, 若还需更大的悬架侧倾角刚度,还可布置横向稳定杆。 6.两侧车轮运转不均衡时外倾具有良好的回复作用。 7.在车身摇摆时具有较好的前束控制能力。 8.车轮运动特性比较好,操纵稳定性很好,尤其是在平整的道路情况下。 9.通过障碍的轴距具有相当好的加大能力,通过性好。 10.如果采用连续焊接的话,强度较好。 缺点: 1.对横向扭转梁和纵向拖臂的连续焊接质量要求较高。 2.不能很好地协调轮迹。 3.整车动态性能对轴荷从空载到满载的变化比较敏感。 4.但这种悬架在侧向力作用时,呈过度转向趋势。另外,扭转梁因强度关系,允 许承受的载荷受到限制。 扭转梁式悬架结构简单、成本低,在一些前置前驱汽车的后悬架上应用较多。 拖曳臂式悬架 优点: 1.Y轴和X轴方向尺寸紧凑,非常有利于后乘舱(尤其是轮罩间宽度尺寸较大) 和下底板备胎及油箱的布置。 2.与车身的连接简单,易于装配。 3.结构简单,零件少且易于分装; 4.由于没有衬套,滞后作用小。 5.可考虑后驱。 缺点: 1.由于沿着控制臂相对车身转轴方向控制臂较大的长宽比,侧向力对前束将产生 不利的影响。 2.车身摇摆(body roll)对外倾产生不利影响;(适当的控制臂转轴有可能改善外
题目一: 考虑如图所示的倒立摆系统。图中,倒立摆安装在一个小车上。这里仅考虑倒立摆在图面内运动的二维问题。倒立摆系统的参数包括:摆杆的质量(摆杆的质量在摆杆中心)、摆杆的长度、小车的质量、摆杆惯量等。 图倒立摆系统 设计一个控制系统,使得当给定任意初始条件(由干扰引起)时,最大超调量 %≤10%,调节时间ts ≤4s ,使摆返回至垂直位置,并使小车返回至参考位置(x=0)。 要求:1、建立倒立摆系统的数学模型 2、分析系统的性能指标——能控性、能观性、稳定性 3、设计状态反馈阵,使闭环极点能够达到期望的极点,这里所说的期望的极点确定 是把系统设计成具有两个主导极点,两个非主导极点,这样就可以用二阶系统的 分析方法进行参数的确定 4、用MATLAB 进行程序设计,得到设计后系统的脉冲响应、阶跃响应,绘出相应状 态变量的时间响应图。 解: 1 建立一级倒立摆系统的数学模型 1.1 系统的物理模型 如图1所示,在惯性参考系下,设小车的质量为M ,摆杆的质量为m ,摆杆长度为l,在某一瞬间时刻摆角(即摆杆与竖直线的夹角)为θ,作用在小车上的水平控制力为u。这样,整个倒立摆系统就受到重力,水平控制力和摩擦力的3外力的共同作用。
图1 一级倒立摆物理模型 1.2 建立系统状态空间表达式 为简单起见,本文首先假设:(1)摆杆为刚体 ;(2)忽略摆杆与支点之间的摩擦;( 3) 忽略小车与导轨之间的摩擦。 在如图一所示的坐标下,小车的水平位置是y,摆杆的偏离位置的角度是θ,摆球的水平位置为y+lsin θ。这样,作为整个倒立摆系统来说,在说平方方向上,根据牛顿第二定律,得到 u l y dt d m dt d M =++)sin (y 22 22θ (1) 对于摆球来说,在垂直于摆杆方向,由牛顿第二运动定律,得到 θθsin )sin y (m 22 mg l dt d =+ (2) 方程(1),(2)是非线性方程,由于控制的目的是保持倒立摆直立,在施加合适的外力条件下,假定θ很小,接近于零是合理的。则sin θ≈θ,cos θ≈1。在以上假设条件下,对方程线性化处理后,得倒 u ml M =++.. ..y m θ)( (3)
2007年10月Power System Technology Oct. 2007 文章编号:1000-3763(2007)19-0087-04 中图分类号: TM712 文献标识码:A 学科代码:470?4054 基于Simulink的飞机电源系统建模与仿真 唐虹1,黄茜汀1,唐万忠2,许自杰2,李安奇2 (1.西北工业大学机械电子工程学院,陕西省西安市 710072; 2.成都飞机工业(集团)有限责任公司,四川省成都市 610092) Simulink Based Modeling and Simulation of a Certain Kind of Aircraft Power Supply System TANG Hong1,HUANG Qian-ting1,TANG Wan-zhong2,XU Zi-jie2,LI An-qi2 (1.School of Mechanical and Electronic Engineering,Northwestern Polytechnical University, Xi’an 710072,Shaanxi Province,China;2.Chengdu Aeroplant Industry(Group) Company Limited,Chengdu 610092,Sichuan Province,China) ABSTRACT: By means of detailed analysis on power supply system of a certain type of aircraft and on the basis of researching generator model, load model as well as their interrelation, taking the power generation part of aircraft power supply system for example, a mathematical model of power generation part, in which the generator occupies kernel place, is built up by use of micro increment and piece-wise linearization. According to the relations among the models of all parts in power supply system, a simulation model for whole aircraft power supply system is established and the simulation study on this model is carried out by use of the Simulink toolbox in Matlab software. Simulation results show that the established model is simple, easy to use and the simulation results are of high precision. KEY WORDS: power supply system;modeling;mathematical mode;transfer function;simulation;Simulink;Matlab 摘要:分析了某型号飞机的电源系统,讨论了发电机模型和负载模型及其相互关系,以发电部分为例,采用微增量和分段线性化的方法,建立了以发电机为核心的电源系统发电部分数学模型。最后利用Matlab软件中的Simulink工具箱,根据系统各部分模型间的关系建立了整个电源系统仿真模型,并对其进行了仿真研究。仿真结果表明,所建立模型简单、方便、仿真精度高。 关键词:电源系统;建模;数学模型;传递函数;仿真;Simulink;Matlab 0 引言 电源系统是飞机上一个极其重要的系统。电源系统的供电质量及可靠性直接影响整个飞机的性能。飞机用电负载特性比较复杂,除了常规线性负载外,还有大量的恒功率负载和再生性负载等非线性负载。雷达、导航设备等内部有开关电源,属于恒功率负载,当系统电压降低时,将汲取大电流,呈现负阻抗特性。而各种电力传动机构、电动机在制动时,也将向系统回馈能量。这些负载特性都将直接影响电源系统的品质,给系统的稳定性带来不利影响[1-4]。目前,我国飞机电源系统工作状态的性能测试方法一直采用传统的人工方式,花费了大量的人力、物力。 本文采用现代计算机仿真技术来描述飞机电源系统的数学模型,并利用Matlab软件中的Simulink 工具箱对其进行仿真,模拟实际电源系统的工作状态,直接显示负载变化对飞机电源的影响[5],为今后制订合理的增减设备方案、预防事故发生提供有效参考。 1 飞机电源系统介绍及建模分析 飞机电源系统由主电源、二次电源、应急电源、电源的转换、保护、调节、稳定和检测等电路组成,其作用是向飞机上的所有用电设备(如油泵,雷达等)提供电能,保证飞机的安全飞行,完成飞行和作战任务。本文所研究的飞机电源系统,其主电源由航空直流发电机和控制保护器构成,辅助和应急电源为航空蓄电池。发电机与蓄电池并联向系统供电,其整体结构如图1所示。 飞机电源系统随负载变化,分析和建立电源系统及负载的整体数学模型,是电源系统仿真分析的必要途径。在建立系统数学模型时,本文以飞机电源系统发电机为核心,采用“拼图式”由局部到整体的方法,先建立发电机的数学模型并单独仿真检
1.一阶倒立摆建模 在忽略了空气流动阻力,以及各种摩擦之后,可将倒立摆系统抽象成小车和匀质杆组成的系统,如下图所示,其中: M :小车质量 m :为摆杆质量 J :为摆杆惯量 F :加在小车上的力 x :小车位置 θ:摆杆与垂直向上方向的夹角 l :摆杆转动轴心到杆质心的长度 根据牛顿运动定律以及刚体运动规律,可知: (1) 摆杆绕其重心的转动方程为 (2) 摆杆重心的运动方程为 得 (3)小车水平方向上的运动为 22..........(4)x d x F F M d t -= 联列上述4个方程,可以得出 一阶倒立精确气模型: ()()()()()()()2222222222222222 sin .sin cos cos cos .sin cos .lg sin cos J ml F ml J ml m l g x J ml M m m l ml F m l M m m m l M m J ml θθθθθθθθθθθθ?+++-?= ++-??+-+?=?-++? &&&&&& sin cos ..........(1)y x J F l F l θθθ=-& &2 22 2(sin ) (2) (cos ).........(3)x y d F m x l d t d F mg m l d t θθ=+=-
式中J 为摆杆的转动惯量:3 2 ml J = 若只考虑θ在其工作点附近θ0=0附近(??≤≤-1010θ)的细微变化,则可以近似认为: ?? ? ??≈≈≈1cos sin 02θθθθ& ??? ? ???++-+=++-+= 2.. 2222..)(lg )()()(Mml m M J mlF m m M Mml m M J g l m F ml J x θθθ 2.2 模型建立及封装 1、建立以下模型:
汽车悬架系统研究现状综述 【摘要】悬架作为汽车的重要部件,对汽车的行驶平顺性和操纵稳定性有着直接的影响。通过对被动悬架、半主动悬架和主动悬架的对比分析,可知采用半主动悬架是改善汽车悬架性能的一条新途径。文中对汽车悬架的发展现状及不同学者关于悬架系统运用的控制策略作了分析,为进一步研究悬架系统提供了一定的理论基础和参考。 【关键词】悬架系统平顺性控制策略 悬架是车架与车桥之间一切传力连接装置的总称,它将路面作用于车轮上的垂直反力(支承力)、纵向反力(驱动力与制动力)和侧向反力以及这些反力所造成的力矩传递到车架(或承载式车身)上,吸收和缓和因不平路面而产生的对车体的冲击载荷[1],并能衰减弹性系统引起的振动,使汽车在行驶中保持行驶的平顺性和操纵的稳定性。 现代汽车的悬架系统尽管有各种不同的结构形式,但一般都由弹性元件、减振器和导向机构(纵、横向推力杆)等三部分组成,分别起缓冲、减振和导向的作用,另外还铺设有缓冲块和横向稳定器。如图1所示。 1 悬架类型 按控制力或者所需外部提供能量的多少,可将悬架分为被动悬架、半主动悬架和主动悬架三种类型,其简化模型分别如图2所示。 被动悬架简化模型如图2(a)所示,主要由弹性支承(弹簧装置)和阻尼器(车辆减震器)组成,无外部能量输入,其弹簧刚度和减振器阻尼系数是不可调节的,在汽车行驶过程中无法随外部路面状况而改变,只能保证在一种特定路面和速度下达到性能最优折中,该结构简单,性能稳定,经过不断改进和发展,现在技术已经相当成熟。但由于平顺性和操纵稳定性对悬架参数的要求不一样,这种传统的被动悬架已经不能满足汽车工业的发展。 半主动悬架简化模型如图2(b)所示,由可变特性弹簧和减振器组成,目前应用较多的是基于阻尼可调减振器的半主动悬架。其工作原理是根据簧上质量相对车轮的速度响应和加速度响应等反馈信号,按照一定的控制规律调节可调减振器的阻尼力。半主动悬架突破了被动悬架系统只能在某种工况下达到最优的局限,并可以根据路面的激励和车身的响应对悬架的阻尼系数进行自适应调整,以改善悬架的振动特性,从而使车身的振动控制在一定的范围内。其最大优点是工作中几乎不消耗发动机的功率,不向机械振动系统中附加能源,只是应用严格的保守(弹簧)或耗能(减振器)元件,结构简单,造价较低,因此受到车辆工程界的广泛重视。 主动悬架由弹性元件和一个力发生器组成,其简化模型如图2(c)所示。
直线一级倒立摆的建模及控制分析 摘要:本文利用牛顿—欧拉方法,建立了直线型一级倒立摆系统的数学模型。在分析的基础上, 采用状态反馈控制中极点配置法设计了用于直线型一级倒立摆系统的控制器。此外,用MATLAB 仿真绘制了相应的曲线并做了分析。 一、问题描述 倒立摆控制系统是机器人技术、控制理论、计算机控制等多个领域和多种技术的有机结合,其被控系统本身是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,是控制理论研究中较为理想的实验对象。它为控制理论的教学、实验和科研构建了一个良好的实验平台,促进了控制系统新理论、新思想的发展。倒立摆系统可以采用多种理论和方法来实现其稳定控制,如PID,自适应、状态反馈、智能控制等方法都己经在倒立摆控制系统上得到实现。 由于直线一级倒立摆的力学模型较简单,又是研究其他倒立摆的基础,所以本文利用所学的矩阵论知识对此倒立摆进行建模和控制分析。 二、方法简述 本文利用牛顿—欧拉方法,建立了直线型一级倒立摆系统的数学模型。在分析的基础上, 采用状态反馈控制中极点配置法设计了用于直线型一级倒立摆系 统的控制器。此外,用MATLAB 仿真绘制了相应的曲线并做了分析。 三、模型的建立及分析 3.1 微分方程的推导 在忽略了空气阻力,各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如下图1所示。
图1 直线一级倒立摆系统 假设 M 为小车质量;m 为摆杆质量;b 为小车摩擦系数;l 为摆杆转动轴心到杆质心的长度;I 为摆杆惯量;F 为加在小车上的力;x 为小车位置;φ为摆杆与垂直向上方向的夹角;θ为摆杆与垂直向下方向的夹角。 图2是系统中小车和摆杆的受力分析图。其中,N 和P 为小车与摆杆相互作用力的水平和垂直方向的分量。值得注意的是: 在实际倒立摆系统中检测和执行装置的正负方向已确定, 因而矢量方向定义如图2所示, 图示方向为矢量正向。 (a) (b) 图2 小车和摆杆的受力分析图 分析小车水平方向所受的合力,可以得到以下方程: N x b F x M --= (1) 由摆杆水平方向的受力进行分析可以得到下面等式: θθθθs i n c o s 2 ml ml x m N -+= (2) 把这个等式代入上式中,就得到系统的第一个运动方程: ()F ml ml x b x m M =-+++θθθθsin cos 2 (3)
汽车悬架系统动力学研 究 集团标准化办公室:[VV986T-J682P28-JP266L8-68PNN]
(研究生课程论文) 汽车动力学论文题目:汽车悬架系统动力学研究 指导老师:乔维高 学院班级: 学生姓名: 学号: 2015年1月
汽车悬架系统动力学研究 摘要:汽车悬架类型的选择和悬架参数的差异对汽车的操纵稳定性和行驶平顺性具有重要的影响。主要分析了麦弗逊悬架的结构特点,并通过ADAMS软件建立麦弗逊悬架的3D模型,对其进行仿真分析,得出悬架参数的优化设计方法。关键词:麦弗逊悬架;ADAMS多刚体动力学;仿真分析Theautomobilesuspensionsystemdynam icsresearch CaisiVehicle141 Abstract:Differentkindsofsuspensionsystemsand ofdifferencesinsuspens ionparametersonthevehiclesteeringstabilityandridingcomforthaveimporta ntinfluence.MainlyanalyzedthestructurecharacteristicsofMacphersonsusp ension,andbyusingADAMSsoftwaretoestablish3DmodelofMacphersonsuspensio n,carryonthesimulationanalysis,themethodofoptimaldesignparametersofth esuspension. Keywords:Macphersonsuspension;ADAMS/Car;multi-rigid-bodydynamics;simulationandanalysis 引言 汽车悬架是汽车车轮与车身之间一切装置的总称。其功用在于:在垂直方向能够衰减振动和起悬挂作用;在侧向可防止车身侧倾和左右车轮载荷转移;在行驶方向上能够保证驱动与制动的实现并保持行驶方向的稳定性。不同的悬架设置会使驾驶者有不同的感受。看似简单的悬架系统综合多种作用力,决定着轿车的稳定性、舒适性和安全性,是现代轿车十分关键的部件之一。悬架系统起着传递车轮和车身之间的力和力矩、引导与控制汽车车轮与车身的相对运动、缓和路面传递给车身的冲击、衰减系统的振动等作用,汽车悬架系统对汽