
ANO-Tech匿名四轴介绍
硬件介绍
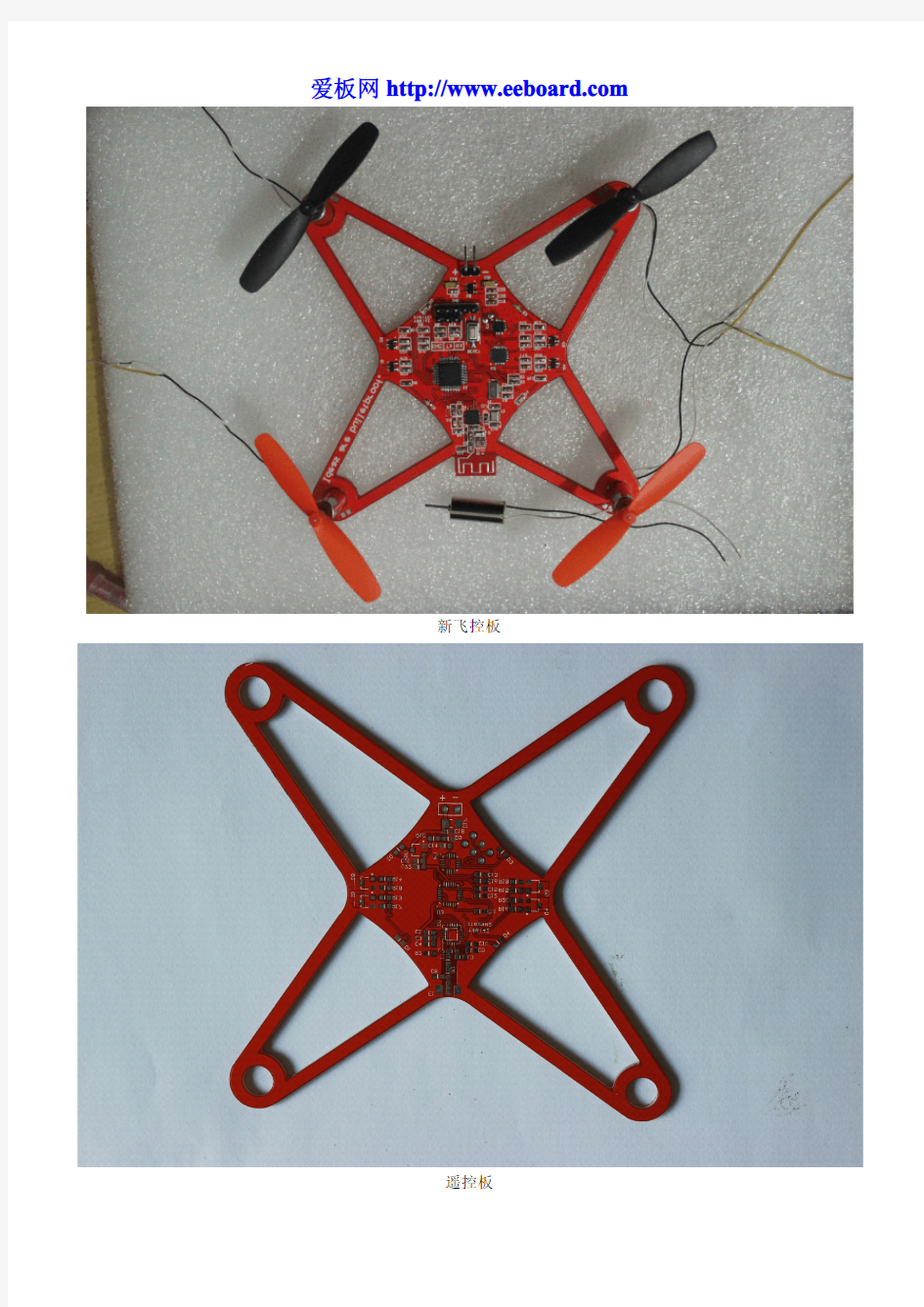
1:飞机:STM32F103主控,MPU6050六轴传感器,NRF24L01+通讯芯片,2.4G功放芯片,超轻2.4G增益天线,7MM空心杯电机,螺旋桨,电池
2:遥控板:STM32F103主控,NRF24L01+通讯芯片,2.4G功放芯片,进口FTDI芯片,外接2.4天线
3:下载板:STM32F103主控,SWD下载方式
旧飞控板
新飞控板
遥控板
下载器
平台特点
1:完全自主设计,所有电路板自主设计(下载板为阿莫开源方案),飞机电路、遥控板电路经过多次验证,更加成熟,硬件、软件完全开源。
2:板载无线通讯芯片(NRF24L01+),此方案是从众多无线传输方案中精挑细选确定的,更加符合此项目的情况,蓝牙距离短,设计复杂,成本高,需要配对,wifi功耗大,距离短,433速率慢,无法满足飞机状态参数实时回传的要求,最终确定2.4G的NRF24L01+方案,针对该芯片距离短的缺点,在飞机和遥控板上都加装了2.4G 功放芯片,增加通讯距离,实测13M稳定,再远没有测试,估计几十米没问题,但是有十几米的稳定距离就够了,因为我们的四轴飞机才10厘米大,十米时就已经看不清了。而2.4G可以提供2M的空中波特率,完全满足项目需要。飞控板和遥控板上同时预留了蓝牙接口,随时可以升级到蓝牙连接。
3:飞机PCB板根据前几次做板的经验,省去5883(因电机干扰无法使用)和一个晶振,优化布局,使PCB面积更加小巧,同时减轻重量,同时增加LED数量,使飞行更加绚丽。
4:遥控板作用:遥控板负责和飞机进行通讯,传送遥控信号,并接受飞机数据,上传PC以便分析存储。遥控板需要外接航模遥控或者PC来遥控飞机飞行,相关代码已经完成。使用航模遥控来控制飞行时,将遥控器的PPM 输出,也就是接模拟器的接口引出,插在我们的遥控板上,我们的遥控板会采集PPM信号,并转发给飞机。
使用PC遥控时,有专用的上位机软件,通过键盘鼠标即可遥控飞行。
遥控板使用串口同PC相连,使用进口FTDI芯片,500000波特率稳定运行(再高没试过,500K够用了),相当于1MS传输50字节的数据。
遥控板可以当作anduino下载器使用,提供相应接口,提供电池接口,方便室外使用。
5:下载器:下载器使用阿莫开源方案,SWD下载方式,只需要四根线,更节省空间,速度更快,相比串口IAP (bootloader)方式下载,速度更快,优点是可以在线仿真,可以用开发工具实时观察变量、设置断点等一切仿真器提供的功能,大大提高开发效率。
6:提供一个相同的开发环境,芯片、IO相同,飞机重量,电机参数,螺旋桨参数相同,使大家可以方便的分享、尝试新程序,下载后即可运行,不用修改各种参数,同时相同的参数也使PID的调试更具有可重复性,一套好的参数可以对应所有飞机,方便大家分享自己的参数。
软件介绍
1:飞控程序完全开源,从怎么初始化传感器,怎么读取传感器,到怎么计算姿态,怎么用姿态控制飞机,完全开源,方便大家学习。
2:STM32纯硬件IIC、NRF24L01双向传输、MPU6050DMP方式都已经解决,提供给大家使用,大家直接下载到板子上就可以使用。(这几个问题了解的应该知道,都是该项目关键的地方)
3:以后软件更新也会第一时间在群里开源,方便大家学习使用,共同进步。另外很多东西楼主不会,大家可以发挥长处,一同将项目变的更加完美。
上位机介绍
上位机界面:
基本功能:
高级收码:
波形显示:
飞控状态:
飞控参数:(此项功能正在完善中,很快可以在飞行过程中实时调参(PID参数等))。
上位机功能简介:
目前上位机的功能有:
1:基本串口收发,和其他串口精灵功能相同,字符串格式收发,HEX格式收发,可以说是最基本的串口工具
2:高级收码,可以自定义数据格式,有帧头、功能字、长度、校验功能,数据格式支持uint8、int16、uint16、int32、float,可以将任意想显示的数据传回上位机显示,并画出波形。
3:飞控状态显示,可以实时3D显示飞机状态,显示各个传感器读数,监控电池电压,电机转速,遥控各通道值4:波形显示,可以将需要的数据以波形的方式显示出来,可以独立开关不同波形的显示,可以全屏,可以保存、读取波形数据。
5:方便的DEBUG功能,如下图,可以方便显示不同布尔型变量和数字型变量,方便无线在线调试
6:飞控参数调整,可以无线调整飞控的各项参数,甚至在飞行过程中就可以调整参数,此项功能大大提高调试效率,不用重新下载程序,不用连接调试线、串口线,使用无线方式就可以完成参数的调整。
7:遥控功能,可以使用键盘鼠标来遥控飞行,方便没有遥控器的DIYer
8:更多细节功能就不一一叙述了,上位机里有详细说明
特点:
1:好用的波形功能,速度达到1MS一组数据,配合遥控板的高速串口芯片(1毫秒50字节),可以完美显示各种高速数据,例如可以将每次的传感器采样值和经过滤波后的数据同时通过无线上传到上位机,上位机可以画出原始数据的波形和滤波后的波形,频率和采样频率相同,达到1MS一次,上位机可以实时观察每次的采样值和滤波后数据,方便观察滤波效果,特别是飞行过程中的滤波效果,因为电机对传感器影响较大,只有真实飞行才能模拟真实的使用环境。
2:可以3D显示飞机状态及各项参数
四轴飞行器运动分析 一、飞行原理 四轴飞行器的结构形如图所示,其中同一对角线上的电机转向应该相同,不同对角线上的电机转向应该相反。这样,当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。 与传统的直升机相比,四旋翼飞行器有下列优势:各个旋翼对机身所施加的反扭矩与旋翼的旋转方向相反,因此当电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,可以平衡旋翼对机身的反扭矩。四旋翼飞行器在空间共有6个自由度(分别沿3个坐标轴作平移和旋转动作),这6个自由度的控制都可以通过调节不同电机的转速来实现。其基本运动状态可分为: (1)垂直运动; (2)俯仰运动; (3)滚转运动; (4)偏航运动; (5)前后运动; (6)侧向运动;
下面将逐个说明飞行器的各种飞行姿态: 垂直运动——在图中,因有两对电机转向相反,可以平衡其对机身的反扭矩,当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。保证四个旋翼转速同步增加或减小是垂直运动的关键。 俯仰运动——在图(b)中,电机1的转速上升,电机3的转速下降,电机2、电机4的转速保持不变。为了不因为旋翼转速的改变引起四旋翼飞行器整体扭矩及总拉力改变,旋翼1与旋翼3转速该变量的大小应相等。由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕y轴旋转(方向如图所示),同理,当电机1的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
四轴飞行器飞行原理 四旋翼飞行器结构 形式如图所示,电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。 与传统的直升机相比,四旋翼飞行器有下列优势:各个旋翼对机身所施加的反扭矩与旋翼的旋转方向相反,因此当电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,可以平衡旋翼对机身的反扭矩。四旋翼飞行器在空间共有6个自由度(分别沿3个坐标轴作平移和旋转动作),这6个自由度的控制都可以通过调节不同电机的转速来实现。 其基本运动状态分别是: (1)垂直运动; (2)俯仰运动; (3)滚转运动; (4)偏航运动; (5)前后运动; (6)侧向运动; 在控制飞行器飞行时,有如下技术难点: 首先,在飞行过程中它不仅受到各种物理效应的作用,还很容易受到气流等外部环境的干扰,很难获得其准确的性能参数。
其次,微型四旋翼无人飞行器是一个具有六个自由度,而只有四个控制输入的欠驱动系统。它具有多变量、非线性、强耦合和干扰敏感的特性,使得飞行控制系统的设计变得非常困难。 再次,利用陀螺进行物体姿态检测需要进行累计误差的消除,怎样建立误差模型和通过组合导航修正累积误差是一个工程难题。这三个问题解决成功与否,是实现微型四旋翼无人飞行器自主飞行控制的关键,具有非常重要的研究价值。 下面将逐个说明飞行器的各种飞行姿态: 垂直运动——在图中,因有两对电机转向相反,可以平衡其对机身的反扭矩,当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。保证四个旋翼转速同步增加或减小是垂直运动的关键。 俯仰运动——在图(b)中,电机1的转速上升,电机3的转速下降,电机2、电机4的转速保持不变。为了不因为旋翼转速的改变引起四旋翼飞行器整体扭矩及总拉力改变,旋翼1与旋翼3转速该变量的大小应相等。由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕y轴旋转(方向如图所示),同理,当电机1的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋
点胶机操作说明 设备介绍 本设备操作简单,功能强大。能实现点,直线,和不规则图形多种方式点胶。手持示教器操作,编程方便快捷,简单易学。 设备主界面 本点胶机的作业部分,由点胶控制系统、UV 固化系统、示教编程系统组成。 1. 点胶控制系统介绍 主界面 编程示教器 UV 灯固化控 制器 点胶控制器 点胶阀和CCD 点胶气压表 电压显示屏 点胶气压调节 电压调节 LED 指示灯 SET 确认键 光标移动键 LED 显示屏
点胶气压:点胶气压一般设置在0.1~0.3mpa 。在其他参数不变的情况下,气压越大,点胶量越大。 电压调节:调节点胶阀的设定电压,在其他参数不变下,电压越大,点胶量越大。我们用的电压一般设定到40~70v之间。 电压显示屏:输出开关必须在ON的状态下才能出胶。额度电流不能调节。 LED指示灯 LED 显示屏 点胶阀开关键 点胶触发按加减或上下移动功能键 实际电压设定电压 额定电流 实际电流开关状态
点胶模式:有划线、循环、清洗三种模式。本设备选用画线模式。 点胶时间:此时间为撞针抬起时间。 间歇时间:该时间为撞针两次撞击的时间间隔。 脉冲数:控制器对点胶进行计数。 参数设置 在主屏显示下按下“SET ”键可进入菜单页面 用“+”、“-”选择相应菜单,红色为当前选择项。按“SET ”键确认可进行参数设置和模式设置。
在参数设置菜单中,用“+”、“-”选择需要设置项目。 2、UV 固化系统介绍 主界面介绍 光强指示灯 时间指示灯 故障指示灯 光强设置键 通道按键 固化时间 光强值 通道状态指示灯 模式指示灯 时间设置键 模式设置键 加减键 确认键
我们在制作一个非常袖珍的四轴飞行器,就用PCB作为承力结构。第一个版本被命名为疯狂直升机。 它的主要特点有: ?STM32 Cortex-M3 CPU ?3轴加速度计 ?1轴/2轴陀螺仪 ?Nordic 2.4GHz 射频通信芯片 ?电动机,螺旋桨和银辉(Silverlit)X翼模型飞机的电池 这架直升机可以从电脑上通过USB无线适配器遥控。我们制作了三架样品(每个成员各一架),并完成了大多数的固件程序。 为了达到稳定飞行的目的,还需要解决一些控制上的问题,以及完成电脑上的控制程序模块。更多的信息和实际飞行视频会在稍后公布:) 这架直升机是通过PC机上运行的Python程序控制的,我们实际上用一个游戏机的蓝牙手柄来操纵它。 疯狂直升机四轴飞行器详述 像承诺过的那样,我们要在这里公布疯狂直升机(也是我们第一架四轴飞行器)的更多信息。该系统的主要架构如下:
疯狂直升机的高层次系统图。 直升机本身是围绕CPU组织起来的。CPU的任务是读取物理传感器(陀螺仪和加速度计)的测量结果,给出控制信号控制电机,让直升机保持稳定。通过一个控制反馈回路,CPU每秒能够对电机发送250次调节转速的指令。无线通信的带宽需求很低,仅仅需要发送操作命令和接受遥测数据。CPU上运行的程序可以通过无线通信更新。 控制和遥测程序在电脑上运行,控制程序从手柄读取输入,然后向直升机发送命令。我们也有调节直升机上控制参数的程序模块,并且会记录下传感器的测量结果,方便调整控制回路。 所有这些开发工作在Windows或linux系统上完成。事实上有三个人同时在这个项目上工作,两个人在Linux上工作,剩下一个人主要使用Windows。利用自由/开源软件(FLOSS,Free/Libre and Open Source Software)许可对提高工作效率非常有帮助。我们主要使用GCC 编译器编译直升机程序,GNU(GNU's Not Unix,一个包含了递归的缩写!GNU Linux工程是为与可复制﹑修改﹑和重新分配的源代码一起的类Unix操作系统的发展而建立的。)建立我们的工程,Mercurial(一个轻量级的分布式版本控制系统)管理我们的源代码,与直升机之间的通讯采用python/pyusb(一个python上的USB通讯软件库)。所有这些软件都能在linux和windows系统间来回无缝切换,使这个项目的管理变得容易许多。 电动机之间的距离(X轴和Y轴方向)大约有8cm,整个飞行器的重量只有20g。 电路板顶面的细节
目录 第一章概述 (3) 1.1硬件 (3) 1.2 软件 (4) 1.3 配件......................................................................................................... 错误!未定义书签。 1.4 主板尺寸(单位:mm)....................................................................... 错误!未定义书签。 1.5 手持编程器尺寸(单位:mm)........................................................... 错误!未定义书签。第二章主界面及按键说明 .. (5) 2.1 主界面说明 (5) 2.2 手持编程器按键说明 (6) 2.3 程序选择及对针按键说明..................................................................... 错误!未定义书签。第三章编程的基本方法说明 . (9) 3.1 单位符号解释 (9) 3.2 点胶程序结束的约定 (9) 3.3 点胶程序运行方式 (9) 3.4 点胶的基本路径组成 (10) 第四章菜单1 (12) 4.1 第1页1.文件名编辑 (12) 4.2 第1页2.生成默认点胶参数 (12) 4.3 第1页3.编辑多个编程点 (13) 4.4 第1页4.设置标号 (16) 4.5 第1页5.阵列点胶 (17) 4.6 第1页6.阵列展开操作 (18) 4.7 第1页7.调用子程序 (18) 4.8 第1页8.调用文件 (19) 4.9 第1页9.程序跳转 (19) 4.10 第2页1.有限次数循环 (19) 4.11 第2页2.程序结束或返回 (20) 4.12 第2页3.延时 (20)
四旋翼飞行器的结构形式和工作原理 1.结构形式 直升机在巧妙使用总距控制和周期变距控制之前,四旋翼结构被认为是一种最简单和最直观的稳定控制形式。但由于这种形式必须同时协调控制四个旋翼的状态参数,这对驾驶员认为操纵来说是一件非常困难的事,所以该方案始终没有真正在大型直升机设计中被采用。这里四旋翼飞行器重新考虑采用这种结构形式,主要是因为总距控制和周期变距控制虽然设计精巧,控制灵活,但其复杂的机械结构却使它无法再小型四旋翼飞行器设计中应用。另外,四旋翼飞行器的旋翼效率相对很低,从单个旋翼上增加拉力的空间是非常有限的,所以采用多旋翼结构形式无疑是一种提高四旋翼飞行器负载能力的最有效手段之一。至于四旋翼结构存在控制量较多的问题,则有望通过设计自动飞行控制系统来解决。四旋翼飞行器采用四个旋翼作为飞行的直接动力源,旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,旋翼1和旋翼3逆时针旋转,旋翼2和旋翼4顺时针旋转,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。四旋翼飞行器的结构形式如图1.1所示。
图1.1四旋翼飞行器的结构形式 2.工作原理 典型的传统直升机配备有一个主转子和一个尾桨。他们是通过控制舵机来改变螺旋桨的桨距角,从而控制直升机的姿态和位置。四旋翼飞行器与此不同,是通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。由于飞行器是通过改变旋翼转速实现升力变化,这样会导致其动力部稳定,所以需要一种能够长期保稳定的控制方法。四旋翼飞行器是一种六自由度的垂直升降机,因此非常适合静态和准静态条件下飞行。但是四旋翼飞行器只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
四轴(1)-飞行原理 总算能抽出时间写下四轴文章,算算接触四轴也两年多了,从当初的模仿到现在的自主创作经历了不少收获了也不少。朋友们也经常问我四轴怎么入门,今天就简单写下四轴入门的基本知识。尽量避开专业术语和数学公式。 1、首先先了解下四轴的飞行原理。 四轴的一般结构都是十字架型,当然也有其他奇葩结构,比如工字型。两种的力学模型稍微有些不一样,建议先从常规结构入手(其实是其他结构我不懂)。 常规十字型结构其他结构 常规结构的力学模型如图。 力学模型 对四轴进行受力分析,其受重力、螺旋桨的升力,螺旋桨旋转给机体的反扭矩力。反扭矩影响主要是使机体自旋,可以想象一下直升机没有尾桨的情况。螺旋桨旋转时产生的力很复杂,
这里将其简化成只受一个升力和反扭矩力。其它力暂时先不管,对于目前建模精度还不需要分析其他力,顶多在需要时将其他力设为干扰就可以了。如需对螺旋桨受力进行详细研究可以看些空气动力学的书,推荐两本, 空气螺旋桨理论及其应用(刘沛清,北航出版社) 空气动力学基础上下册(徐华舫,国防科技大学) 网易公开课:这个比麻省理工的那个飞行器构造更对口一些。 荷兰代尔夫特理工大学公开课:空气动力学概论 以上这些我是没看下去,太难太多了,如想刨根问底可以看看。 解释下反扭矩的产生: 电机带动螺旋桨旋转,比如使螺旋桨顺时针旋转,那么电机就要给螺旋桨一个顺时针方向的扭矩(数学上扭矩的方向不是这样定义的,可以根据右手定则来确定方向)。根据作用力与反作用力关系,螺旋桨必然会给电机一个反扭矩。 在转速恒定,真空,无能量损耗时,螺旋桨不需要外力也能保持恒定转速,这样也就不存在扭矩了,当然没有空气也飞不起来了。反扭矩的大小主要与介质密度有关,同样转速在水中的反扭矩肯定比空气中大。 因为存在反扭矩,所以四轴设计成正反桨模式,两个正桨顺时针旋转,两个反桨逆时针旋转,对角桨类型一样,产生的反扭矩刚好相互抵消。并且还能保持升力向上。六轴、八轴…类似。 我们控制四轴就是通过控制4个升力和4个反扭矩来控制四轴姿态。 如力学模型图,如需向X轴正方向前进,只需增加桨3的转速,减少桨1的转速,1、3桨的反扭矩方向是一样的,一个加一个减总体上来说反扭矩没变。此时飞机已经有向X轴方向的分力,即可前行。 如需向X轴偏Y轴45°飞行,那么增加桨2、3的转速,减少桨1、4的转速,即可实现。 如果将X正作为正前方,那么就是”十”模式,如果将X轴偏Y45°作为正前方向,那就是”×”模式。理论上这两种都可以飞行,”十”模式稍微比”×”模式好计算,但是”十”模式不如”×”模式灵敏。 四轴如需向任意方向飞行只需改变电机的转速,至于电机转速改变的量是多少,增量之比是多少就需要算法了。对于遥控航模,不需要知道具体到度级别的方向精度,飞行时手动实时调节方向即可。 四轴除了能前后左右上下飞行,还能自旋,自旋靠的就是反扭矩,如需顺时针旋转,只需增加桨1、3转速,减少2、4转速,注意不能只增加桨1、3而不减少2、4,这样会造成总体升力增加,飞机会向上飞的。 理想情况下,四轴结构完全对称,电机转速一样,飞机就可以直上直下飞行。但事实和理想还是有差距的,不存在完全对称的结构,也没有完全一样的电机螺旋桨。所以需要飞控模块进行实时转速调节,这样才能飞起来,不像直升机,螺旋桨加速就能飞。 2、分析完飞行原理,接下来分析四轴飞行器系统的主要部件。
点胶机知识简介 接下来小编给大家介绍下点胶机知识简介: 一、点胶机的定义: 1、点胶机:点胶机又称涂胶机,灌胶机,打胶机等,是专门对流体进行控制,并将液体点滴、涂覆、灌封于产品表面或产品内部的自动化机器。点胶机主要用于产品工艺中的胶水、油,漆以及其他液体精确点,灌.注、涂、点滴到每个产品精确位置,可以用动实现打点,画线,圆型或弧型.。 2、点胶机适用的液体:各种溶济、粘接剂、油,漆.化学材料,固体胶等,包括硅胶、EMI导电胶、UV胶、AB胶、快干胶、环氧胶、密封胶、热胶、润滑脂、银胶、红胶、锡膏、散热膏、防焊膏、透明漆、螺丝固定剂,木工胶、厌氧胶、亚克力胶、防磨胶、水晶胶、灌注胶、喇叭胶、瞬间胶、橡胶,油漆、搪瓷漆、亮漆、油墨、颜料等。 3、点胶机应用领域:点胶机适用于工业生产的各个领域:手机按键、印花、开关、连接器、电脑、数码产品、数码相机、MP3 、MP4 、电子玩具、喇叭、蜂鸣器、电子元器件、集成电路、电路板、LCD液晶屏、继电器、扬声器、晶振元件、LED灯、机壳粘接、光学镜头、机械部件密封。 二、目前市场点胶机的品牌: 美国:EFD、飞士能、Asymtek、CAMALOT、等;德国:scheugenpflug 等;亚洲:武藏MUSASHI 、世宗、韩国阿尔帕、IEI、LILE、等;中国:天豪点胶机,月无声、奥松/世椿、华海达、腾盛等等;目前单液点胶机已经做得很成熟,世界品牌主要是EFD和I&J ,MUSASHI, 武藏等,但进入国内的这些品牌销售的产品都是非常成熟的,一般具有通用性,但无法根据客户实际要求订做设备,以及定做,成本也会相当高,而且服务无法及时到达。双组份的点胶机目前国外的机器挺多,技术也相对成熟,但是款式和整体结构并未按国内的使用习惯做改进,显得体积比较大, 国内双液点胶技术已经走向成熟,目前已经有专业双液设备存在,而且质量稳定,很适合国内用户使用,天豪公司就有这款双液混合定量设备,在国外都销售比较好。 三、点胶机分类: 第一类:单液点胶机(也称单组份点胶机、点胶机): 1、控制器式点胶机:包括自动点胶机、定量点胶机、半自动点胶机、数显点胶机、精密点胶机、等。 2、桌面型点胶机:包括台式点胶机、台式三轴点胶机、台式四轴点胶机、或者桌面式自动点胶机、3轴流水线点胶机、多头点胶机、多出胶口点胶机、划圆点胶机、转圈点胶机、喇叭点胶机、手机按键点胶机、机柜点胶机等。>进口泵 3、压力桶式点胶机:压力桶+点胶阀+控制器,大出胶量点胶机。 第二类:双液点胶机(也称双组份点胶机、AB胶点胶机、AB胶灌胶机、双液灌胶机):1、台式双液点胶机;2、落地式双液点胶机;3、PU胶双液灌注机;4、画圆自动点胶机;5、多头双液点胶机。
4-AXIS AEROCRAFT INSTRUCTION MANUAL 四轴飞行器说明书 ATTENTION:(注意事项) 1、This 4-axis aircraft is suitable for indoor/outdoor flying.but make sure the outdoor wind is not over grade 4. 这款四轴飞行器适用于室内/室外飞行。但要确保室外风力不超过4级。 2、2.4 technology adopted for anti-interference,even more than one quadcopter is flying in the same area they will not interferewith each other. 采用2.4GHZ抗干扰技术, 即使一个以上的飞行器在同一地区飞行,它们也不会彼此干扰。 Beside ,players can let the the aircraft fly up/down/forward/backward,left/right sideward and tuen left/right. 此外,玩家可以让飞机飞上/下/前进/后退,左转/右转和左翻/右翻。 3、Please read this man ual carefull before using,in the mean time ,please well keep the manul for future reference. 请在使用前仔细阅读本手册,同时,请妥善保管说明书备查。 ALL PARETS INCLUDED( 组成结构简介) MAIN MENU:(菜单) Lcd screen液晶屏幕Power light 电源指示灯 Servos舵机Flip key 翻转 Left hand throttle shows左手调节显示Forward and back left and right前,后,左,右Signal display信号指示Direction joystick方向操纵杆 Accelerator and steering 油门和转向Forward/back trimming 前进/后退微调 Left-turn/riggt-turn trimming 左/右转微调Left/right sideways timming左/右侧微调Power switch 电源开关 TRANSMITTER BATTERY INSTALLATION:( 安装发射器电池) Aircraft battery change:( 更换飞机电池) THE RELATED NOTES ABOUT LITHIUM BATTERY’S USAGE: 关于锂电池使用的相关说明 HOW TO CONTROL:(操作说明) 1、Aircraft power switch to the “ON”position.the vehicle-mounted with the flat ground.Motherboard light is blink,don’t turn the fuselage again. 飞行器电源开关拔到“ON”位置。将飞行器平放在地面上,主板上的灯开始闪烁,不要再转动机身。
四旋翼飞行器结构和原理 1.结构形式 旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。结构形式如图1.1所示。 .工作原理 四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
四旋翼飞行器的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
在上图中,电机1和电机3作逆时针旋转,电机2和电机4作顺时针旋转,规定沿x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。 (1)垂直运动:同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。 (2)俯仰运动:在图(b)中,电机1的转速上升,电机3 的转速下降(改变量大小应相等),电机2、电机4 的转速保持不变。由于旋翼1 的升力上升,旋翼3 的升力下降,产生的不平衡力矩使机身绕y 轴旋转,同理,当电机1 的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。 (3)滚转运动:与图b 的原理相同,在图c 中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕x 轴旋转(正向和反向),实现飞行器的滚转运动。 (4)偏航运动:旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。在图d中,当电机1和电机3 的转速上升,电机2 和电机4 的转速下降时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在
四旋翼自主飞行器(B题) 摘要 系统以R5F100LE作为四旋翼自主飞行器控制的核心,由电源模块、电机调速控制模块、传感器检测模块、飞行器控制模块等构成。飞行控制模块包括角度传感器、陀螺仪,传感器检测模块包括红外障碍传感器、超声波测距模块、TLS1401-LF模块,瑞萨MCU综合飞行器模块和传感器检测模块的信息,通过控制4个直流无刷电机转速来实现飞行器的欠驱动系统飞行。在动力学模型的基础上,将小型四旋翼飞行器实时控制算法分为两个PID控制回路,即位置控制回路和姿态控制回路。测试结果表明系统可通过各个模块的配合实现对电机的精确控制,具有平均速度快、定位误差小、运行较为稳定等特点。
目录 1 系统方案论证与控制方案的选择............................................................................................. - 2 - 1.1 地面黑线检测传感器............................................................................................................. - 2 - 1.2 电机的选择与论证................................................................................................................. - 2 - 1.3 电机驱动方案的选择与论证................................................................................................. - 3 - 2 四旋翼自主飞行器控制算法设计............................................................................................. - 3 - 2.1 四旋翼飞行器动力学模型..................................................................................................... - 3 - 2.2 PID控制算法结构分析.......................................................................................................... - 3 - 3 硬件电路设计与实现................................................................................................................. - 5 - 3.1飞行控制电路设计.................................................................................................................. - 5 - 3.2 电源模块................................................................................................................................. - 6 - 3.3 电机驱动模块......................................................................................................................... - 6 - 3.4 传感器检测模块..................................................................................................................... - 7 - 4 系统的程序设计......................................................................................................................... - 8 - 5 测试与结果分析......................................................................................................................... - 9 - 5.1 测试设备................................................................................................................................. - 9 - 5.2 测试结果................................................................................................................................. - 9 - 6 总结........................................................................................................................................... - 10 - 附录A 部分程序清单.................................................................................................................. - 11 -
四轴飞行器知识 什么是四轴飞行器? 四轴飞行器也叫四旋翼飞行器。通俗点说就是拥有四个独立动力旋翼 的飞行器,有四个旋翼来悬停、维持姿态及平飞。四轴飞行器是多轴 飞行器其中的一种,常见的多轴飞行器有两轴,三轴,四轴,六轴, 八轴或者更多轴。 四轴飞行器飞行原理 重心的距离相等, 当对角两个轴产生的升力相同时能够保证力矩的 平衡, 四轴不会向任何一个四轴飞行器有四个电机呈十字形排列, 驱动四片桨旋转产生推力; 四个电机轴距几何中方向倾转; 而四个 电机一对正转,一对反转的方式使得绕竖直轴方向旋转的反扭矩平衡, 保证了四轴航向的稳定. 此飞行控制板规定四轴电机的排布方式相 对应。1,4号电机顺时针方向旋转, 2,3号电机逆时针方向旋转. 四个电机的转速做相应的变化即可实现四轴横向、纵向、竖直方向 和偏航方向上的运动: 当四轴需要向前方运动时, 2,3号电机 保持转速不变, 1号电机转速下降, 4号电机转速上升, 此时4号电 机产生的升力大于1号电机的升力, 四轴就会沿几何中心向前倾转, 桨叶升力沿纵向的分力驱动四轴向前运动. 当四轴要转向左转 向时, 1,4号电机转速上升, 2,3号电机转速下降, 使向左的反扭距 大于向右的反扭矩, 四轴在反扭距的作用下向左旋转.四个桨产生的 推力, 超过或者低于四轴本身重力的时候能够实现竖直方向上升与 下降的运动, 当桨的升力与四轴本身的重力相等的时候即实现悬停。
其他方式的运动原理与以上过程类似. 四轴飞行原理虽然简单, 但实现起来还需很多工作要做. 四轴飞行器需要的零件 无刷电机(4个)、电子调速器(简称电调,4个,)、螺旋桨(4个,需要2个正浆,2个反浆)、飞行控制板(常见有瑞伯达、KK等品牌)、电池(11.1v航模动力电池)、遥控器(最低四通道遥控器)、机架(非必选)、充电器(尽量选择平衡充电器) 怎样知道是否能正常起飞? 一切准备完毕,怎么知道可以试飞了呢,我个人建议为了避免匆忙上马,秒炸。先拿手上试飞比较好,但要注意离身体距离。 拿手上通电,加油门,如果一切正常,四轴是不会大幅度的晃动的,而是比较平稳。还可以故意左右晃动一下,会感觉到四轴保持平衡的反力量,只要达到这个效果,就基本达到了试飞的条件。RBD飞控我复位了好几次,只要没有意外,是基本都能成功的。 试飞场地建议选宽阔的地方,建议是草坪,这样的不容甩坏。 马达选择有刷马达,原因很简单,要需要复杂的电调,直接用MOS 管就可以驱动了。而且响应速度又快,价格也便宜。也可以选择减速组配高转速马达。只是成本高了点。而且实际的测试结果是马达里面火化直冒也无法将四轴自身拉离地面。原因就是马达转速和减速组搭配不合理,转速过快但拉力不够。经历过失败后,决定不在冒险,于是选择了大众配置:瑞伯达 2212,1000KV外转子无刷马达,瑞伯达30A电调(好赢兼容的程序),在解决了如何安装的问题后,终于可
自动点胶机操作说明 在当今客户需求不断变化、新技术不断涌现以及竞争力不断加剧的环境下,鑫晖德的所有员工都深切体会到服务在获取竞争优势中的重要性。因而自公司成立初期我们就建立了完善的服务体系,为用户提供高速度高精度高性能操作简单的桌面自动点胶机设备.快捷型流水线点胶机设备。 点胶机:点胶机又称涂胶机,滴胶机,打胶机等,是专门对流体进行控制,并将流体点滴、涂覆于产品表面或产品内部的自动化机器。点胶机主要用于产品工艺中的胶水、油漆以及其他液体精确点、注、涂、点滴到每个产品精确位置,可以用来实现打点、画线、圆型或弧型。 点胶机分类 第一类:普通型点胶机 1、控制器式点胶机: 包括自动点胶机、定量点胶机、半自动点胶机、数显点胶机、精密点胶机等。 2、桌面型自动点胶机设备: 高性能自动点胶机设备分为 1)200MM 2)300MM 3)400MM500MM行程. 主要包括全自动点胶机设备.自动点胶机设备.台式点胶机、台式三轴点胶机、台式四轴点胶机、台式五轴点胶机、或者桌面式自动点胶机、3轴流水线点胶机、多头点胶机、多出胶口点胶机、划圆点胶机、转圈点胶机、喇叭点胶机、手机按键点胶机、机柜点胶机.电池点胶机.uv点胶机.单液点胶机.双液点胶机.AB胶点胶机.电机点胶机.LCD屏点胶机.LCD触摸屏点胶机.LED户外显示屏灌胶机.数码管灌胶机. 变压器点胶机设备锡膏点胶机设备晶体管点胶机马达点胶机摄像头点胶机晶片点胶机PvC点胶机滴塑点胶机电感点胶机cob点胶机磁芯点胶机螺丝点胶机高频头点胶机镜头点胶机芯片固定点胶机瞬干胶点胶机三维点胶机椭圆点胶机手套点胶机硅胶点胶机三防漆喷涂点胶机 LED点胶机LED喷射点胶机视觉点胶机电脑点胶机等。 第二类:自动型点胶机
全自动定量滴胶机 使用说明书 本机适用范围: 黑胶油漆酒精清水矽胶银浆油墨黄胶硅胶润滑油焊锡膏阻尼油SMT红胶UV胶快干胶水晶胶玻璃胶散热膏喇叭胶防磨胶螺丝胶助焊剂标记漆化学试剂环氧树脂电解液磁液机油等等。 本机适用特点: 通过调整针筒压力,滴胶时间,倒流时间,倒流真空及针咀大小来控制滴出液体的多少;当调整到所需滴出液体适当时,以后本机可用脚踏开关或手动开头触发就可滴出均等的液体(相差不超过0.1%); 本机设有连动滴胶功能,不通过滴胶时间控制,只用脚踏开关或手动开关的间闭时间来控制滴胶。 零件名称功能 电源开关接通电源后,指示灯亮起 模式开关把控制电路置于自动或人工注滴模式 气压调节器调节针筒内压力,顺时针为增压,逆时针为减压,调节适当后向内推入把压力锁住。 滴胶时间制控制滴胶时间,顺时针为增加滴胶时间,逆时针为减少滴胶时间。气压表指示出当前针筒压力。 真空倒流制真空倒流制用来控制针筒液体在没有经脚踏开关控制下流出,顺时针为减少防倒流真空,逆时针为增加防倒流真空。 气源输出接口快捷连接的呼吸插孔。 脚踏开关插座接入脚踏开关,用来触发滴胶。 电源插头电源插上220V电源 保险丝1A 操作方法: 1.插上220V电源 2.插上0-8K/cm2气源 3.电源开关打开 4.调整合适气压(针筒压力) 5.选择合适控制方法(模式开关) 6.调整合适时间(滴胶时间制) 7.调整合适防倒流真空(按逆时针方向逐步由小到大) 8.把液体灌进针筒 9.把针筒销上 10.把针筒对准工件,触发脚踏开关以使胶从针筒滴出
注意事项: 1.针筒保持60度滴胶 2.滴胶后提起针筒 3.不要让液体流入机器内部,以免损坏机器 4.稀释液体小心用倒流真空制,太少倒流真空制会让液体不滴胶时流出,太多会让液体产生气泡及有机会把液体倒流至机器内部,导致损坏机器。 保养及维修: 故障现象排除故障方法 机器不动1.缺电源、气源:接驳电源及气源 2.总开关未打开:打开总开关 3.保险丝折断:更换保险丝 机器启动,但不能启动机器更换开关 有电源,但不能启动机器 1.检查脚踏开关制 2.检查电源插头是否松动 液料不能滴出1.针咀嘟塞:更换针咀 2.检查气源及气压表:重调 液料有滴出的迹象而未离开针咀,又被 收回此故障多见于使用较粘的液体,需换用更大的口径针咀并且适当增加加料时间,减低气压(注意:此时真空回吸有影响,需配合调整) 真空不稳定当供气气压(压缩机)和工作气相差不多并有较大的波动时,容易出现故障。需增大并保持上述两气压之间有3KG/cm2以上的差距
功能介绍:利用小型四旋翼飞机对灾害现场进行勘测,其中四旋翼上添加摄像头对现场进行勘测,从而了解现场状况。 设计思路:小型四旋翼飞机座位各类传感器搭载平台,根据现场实际情况通过控制四旋翼飞机飞行姿态,从而达到对复杂环境的监测。 四旋翼飞行器结构和原理: 1:结构形式 旋翼对称分布在机体的前后,左右四个方向,四个旋翼处于同一高度平面,四个旋翼的结构和半径相同,四个电机对称的安装在飞行器的支架端,支架中间安放飞行控制计算机和外部设备。 四旋翼飞行器一般是由四个可以独立控制转速的外转子直流无刷电机驱动的螺旋桨提供全部动力的飞行运动装置,四个固定迎角的螺旋桨分别安装在两个十字相交的刚性碳素杆的两端。对于绝大多数四旋翼飞行器来讲,飞行器的结构是关于两根碳素杆的交点对称的,并且两个相邻的螺旋桨旋转方向相反;正是由于这种独特结构,使四旋翼飞行器抵消了飞机的陀螺效应。 结构如下 2.工作原理 通过调节四个电机转速来改变旋翼转速,实现升力的变化,进而控制飞行器的姿态和位置。四旋翼是一种欠驱动系统,是一种六自由度的垂直升降机,四个输入力,六个状态输出。 垂直飞行控制:控制飞机的爬升,下降和悬停。图中蓝色弧线箭头方向表示螺旋桨旋转的方向,以下同。当四旋翼处于水平位置时,在垂直方向上,惯性坐标系同机体坐标系重合。同时增加或减小四个旋翼的螺旋桨转速,四个旋翼产生的升力使得机体上升或下降,
从而实现爬升和下降。悬停时,保持四个旋翼的螺旋桨转速相等,并且保证产生的合推力与重力相平衡,使四旋翼在某一高度处于相对静止状态,各姿态角为零。垂直飞行控制的关键是要稳定四个旋翼的螺旋桨转速使其变化一致 横滚控制:如图所示,通过增加左边旋翼螺旋桨转速,使拉力增大,相应减小右边旋翼螺旋桨转速,使拉力减小,同时保持其它两个旋翼螺旋桨转速不变。这样由于存在拉力差,机身会产生侧向倾斜,从而使旋翼拉力产生水平分量,使机体向右运动,当2,4转速相等时,可控制四旋翼飞行器作侧向平飞运动。 俯仰控制:在保持左右两个旋翼螺旋桨转速不变的情况下,减少前面旋翼螺旋桨的转速,并相应增加前面旋翼螺旋桨的转速,使得前后两个旋翼存在拉力差,从而引起机身的前后倾斜,使旋翼拉力产生与横滚控制中水平方向正交的水平分量,使机体向前运动。类似的,当1,3转速相同时可控制四旋翼飞行器作纵向平飞运动。 偏航控制:四旋翼飞行器为了克服反扭矩影响,四个旋翼螺旋桨中的两个逆时针旋转,两个顺时针旋转,对角线上两个螺旋桨上的转动方向相同。反扭矩大小与旋翼螺旋桨转速有关,四个旋翼螺旋桨转速不完全相同时,不平衡的反扭矩会引起机体的转动。因此可以设计四旋翼飞行器的偏航控制,即同时提升一对同方向旋转的旋翼螺旋桨转速并且降低另一对相反方向旋转的旋翼螺旋桨转速,并保证转速增加的旋翼螺旋桨转动方向与四旋翼飞行器机身的转动方向相反。 建立系统动力学模型:
基于stm32设计的四轴飞行器 引言 四轴飞行器是一种结构紧凑、飞行方式独特的垂直起降式飞行器,与普通的飞行器相比具有结构简单,故障率低和单位体积能够产生更大升力等优点,在军事和民用多个领域都有广阔的应用前景,非常适合在狭小空间内执行任务。因此四旋翼飞行器具有广阔的应用前景,吸引了众多科研人员,成为国内外新的研究热点。 本设计主要通过利用惯性测量单元(IMU)姿态获取技术、PID电机控制算法、2.4G无线遥控通信技术和高速空心杯直流电机驱动技术来实现简易的四轴方案。整个系统的设计包括飞控部分和遥控部分,飞控部分采用机架和控制核心部分一体设计增加系统稳定性,遥控部分采用模拟摇杆操作输入使操作体验极佳,两部分之间的通信采用2.4G无线模块保证数据稳定传输。飞行控制板采用高速单片机STM32作为处理器,采用含有三轴陀螺仪、三轴加速度计的运动传感器MPU6050作为惯性测量单元,通过2.4G无线模块和遥控板进行通信,最终根据PID控制算法通过PWM方式驱动空心杯电机来达到遥控目标。 1、系统总体设计 系统硬件的设计主要分要遥控板和飞控板两个部分,遥控板采用常见羊角把游戏手柄的外形设计,控制输入采用四向摇杆,无线数据传输采用2.4G无线模块。飞控板采用控制处理核心和机架一体的设计即处理器和电机都集成在同一个电路板上,采用常规尺寸能够采用普通玩具的配件。系统软件的设计同样包括遥控板和飞控板两部分的工作,遥控板软件的设计主要包括ADC的采集和数据的无线发送。飞控板的软件的设计主要包括无线数据的接收,自身姿态的实时结算,电机PID增量的计算和电机的驱动。整个四轴飞行器系统包括人员操作遥控端和飞行器控制端,遥控端主控制器STM32通过ADC外设对摇杆数据进行采集,把采集到的数据通过2.4G无线通信模块发送至飞控端。飞控板的主要工作就是通过无线模块进行控制信号的接收,并且利用惯性测量单元获得实时系统加速度和角速度原始数据,并且最终解算出当前的系统姿态,然后根据遥控板发送的目标姿态和当姿态差计算出PID电机增量,然后通过PWM驱动电机进行系统调整来实现飞行器的稳定飞行。系统的总体设计框图如图1所示。
目录 第一章概述.................................................. 错误!未定义书签。 硬件................................................... 错误!未定义书签。 软件....................................................... 错误!未定义书签。 配件....................................................... 错误!未定义书签。 主板尺寸(单位:mm)....................................... 错误!未定义书签。 手持编程器尺寸(单位:mm)................................. 错误!未定义书签。第二章主界面及按键说明...................................... 错误!未定义书签。 主界面说明................................................. 错误!未定义书签。 手持编程器按键说明......................................... 错误!未定义书签。 程序选择及对针按键说明..................................... 错误!未定义书签。第三章编程的基本方法说明.................................... 错误!未定义书签。 单位符号解释............................................... 错误!未定义书签。 点胶程序结束的约定......................................... 错误!未定义书签。 点胶程序运行方式........................................... 错误!未定义书签。 点胶的基本路径组成......................................... 错误!未定义书签。第四章菜单1 ................................................ 错误!未定义书签。 第1页1.文件名编辑........................................ 错误!未定义书签。 第1页2.生成默认点胶参数.................................. 错误!未定义书签。 第1页3.编辑多个编程点.................................... 错误!未定义书签。 第1页4.设置标号.......................................... 错误!未定义书签。 第1页5.阵列点胶.......................................... 错误!未定义书签。 第1页6.阵列展开操作...................................... 错误!未定义书签。 第1页7.调用子程序........................................ 错误!未定义书签。 第1页8.调用文件.......................................... 错误!未定义书签。 第1页9.程序跳转.......................................... 错误!未定义书签。 第2页1.有限次数循环...................................... 错误!未定义书签。 第2页2.程序结束或返回.................................... 错误!未定义书签。 第2页3.延时.............................................. 错误!未定义书签。