机械振动学总结
第一章 机械振动学基础
第二节 机械振动的运动学概念
机械振动是种特殊形式的运动。在这运动过程中,机械振动系统将围绕其平衡位置作往复运动。从运动学的观点看,机械振动式研究机械系统的某些物理量在某一数值近旁随时间t 变化的规律。用函数关系式
)(x t x =
来描述其运动。如果运动的函数值,对于相差常数T 的不同时间有相同的数值,亦即可以用周期函数
,2,1)
()(=+=n nT t x t x
来表示,则这一个运动时周期运动。其中T 的最小值叫做振动的周期,T
f 1
=定义为振动的频率。简谐振动式最简单的振动,也是最简单的周期运动。
一、简谐振动
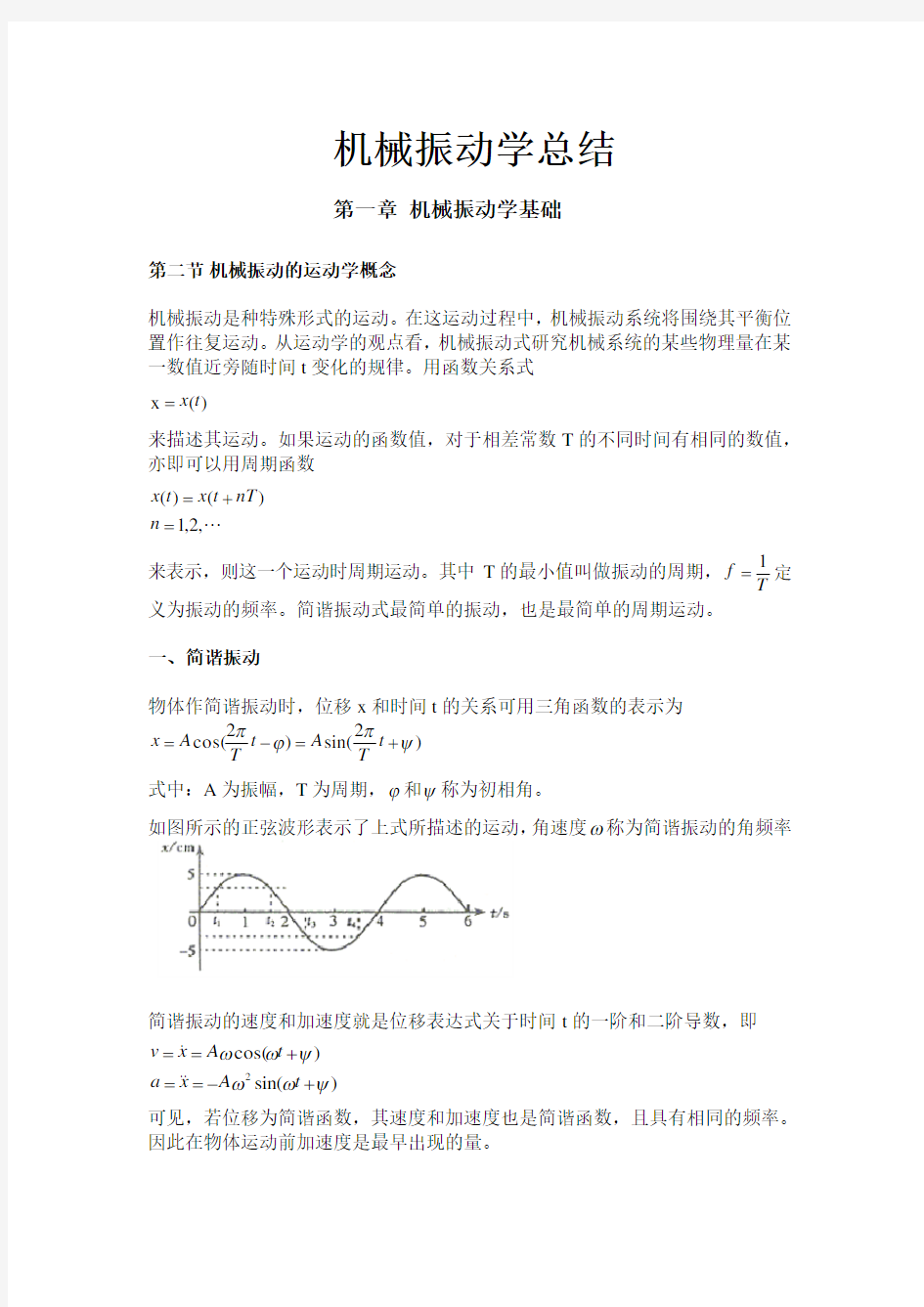
物体作简谐振动时,位移x 和时间t 的关系可用三角函数的表示为
)2sin()2cos(ψπ
?π+=-=t T A t T A x
式中:A 为振幅,T 为周期,?和ψ称为初相角。
如图所示的正弦波形表示了上式所描述的运动,角速度ω称为简谐振动的角频率
简谐振动的速度和加速度就是位移表达式关于时间t 的一阶和二阶导数,即
)sin()cos(2ψωωψωω+-==+==t A x
a t A x
v
可见,若位移为简谐函数,其速度和加速度也是简谐函数,且具有相同的频率。因此在物体运动前加速度是最早出现的量。
可以看出,简谐振动的加速度,其大小与位移成正比,而方向与位移相反,始终指向平衡位置。这是简谐振动的重要特征。
在振动分析中,有时我们用旋转矢量来表示简谐振动。图P6 旋转矢量的模为振幅A ,角速度为角频率ω 若用复数来表示,则有
)
sin()cos()
(ψωψωψω+++==+t jA t A z Ae z t j
用复指数形式描述简谐振动,给计算带来了很多方便。因为复指数t j e ω对时间求导一次相当于在其前乘以ωj ,而每乘一次j ,相当于有初相角
2
π。 二.周期振动
满足以下条件:
1)函数在一个周期内连续或只有有限个间断点,且间断点上函数左右极限存在; 2)在一个周期内,只有有限个极大和极小值。
则都可展成Fourier 级数的形式,若周期为T 的周期振动函数,则有
∑∞
=++=1
0)sin(2)(n n N t n A a t x ψω
式中
2
2n
n n b a A += n
n
n b a =ψt a n 三、简谐振动的合成
一、同方向振动的合成 1.俩个同频率的简谐振动
)sin(222ψω+=t A x ,)sin(2222ψω+=t A x
它们的合成运动也是该频率的简谐振动
)sin(ψω+=t A x
2.俩个不同频率振动的合成
t A x 111sin ω= t A x 222sin ω=
若21ωω≤,则合成运动为
t A t A x x x x 22112
1sin sin ωω+=+=
若21ωω≥ ,对于A A A ==21 ,则有
t
t A x t A t A x x x x )2
sin(
)2
cos(
2sin sin 2
12
122112
1ωωωωωω+-=+=+=
上式可表示为
t t A ωδω
sin 2
sin
2 二、两垂直方向振动的合成 1.同频率振动的合成 如果沿x 方向的运动为 t A x ωsin =
沿y 方向的运动为 )sin(?ω+=t B y
2不同频率振动的合成 对于俩个不等的简谐运动
)
sin(sin 21ψωω+==t B y t A x
它们的合成运动也能在矩形中画出各种曲线。
第三节 构成机械运动的基本元素
构成机械振动的基本元素有惯性、恢复性和阻尼。惯性就是能使物体当前运动继续下去的性质。阻尼就是阻碍物体运动的性质。恢复性就是能使物体位置恢复到平衡位置的性质。
第四节 自由度与广义坐标
系统受到约束时,其自由度数为系统无约束时的自由度数与约束条件数之差。对于n 个质点组成的质点系,个质点的位移可用3n 个直角坐标来描述。当有r 个约束条件时,约束方程为
r
k z y x z y x f n n n k ,,2,10),,,,,,(111 ==
为了确定各质点的位置,可选取N=3n-r 个独立的坐标
N
j z y x z y x q q n n n j j ,,2,1),,,,,,(111 ==
来代替3n 个直角坐标,这种坐标叫做广义坐标。
第二章 单自由度系统
第二节 无阻尼自由振动
单自由度无阻尼系统自由振动的运动方程 0=+kx x
m 令m k w n
/2
=,系统的运动方程可表示为
02
=+x w x n
函数x(t)必须具有这样的性质:在微分过程中不改变其形式。因而假定方程的解为
t Be t x λ=)(
的形式是合理的。式中B 和λ是待定常数,代入方程中
0)(2
=+t n Be w λλ
方程决定于
022=+n w λ
方程叫做系统的特征方程或频率方程,它有一对共轭虚根:n j ωλ=1,n j ωλ-=2,叫做系统的特征值或固有值,方程的俩个独立的特接分别为
t j n e B t x ω11)(= t j n e B t x ω-=22)(
式中1B 和2B 是任意常数。方程的通解为
t
D t D t x t B B j t B B t x e B e B t x n n n n t
j t j n n ωωωωωωsin cos )(sin )(cos )()()(21212121+=-++=+=-方程的通解从物理意义上说,表达了系统
对于确定的初始条件,系统发生某种确定的运动为
t x
t x t x n n
n ωωωsin cos )(00 +
=
它是由俩个相同频率的简谐运动所组成。再将这俩个相同频率的简谐运动合成为
)sin()(ψω+=t A t x n
式中
00
202
0tan ,)(
x
x x
x A n n
ωψω=
+=
A 为振幅,ψ为初相角。线性系统自由振动振幅的大小只决定于施加给系统的初始条件和系统本身的固有频率,而与其他因素无关。线性系统自由振动的频率
m k n /=ω只决定于系统本身参数,与初始条件无关,因而叫做系统的固有频率
或无阻尼固有频率。
第三节 能量法
一个无阻尼的弹簧系统做自由振动时,由于不存在阻尼,没有能量从系统中散逸,没有能量输入,系统机械能守恒。 T+U=E=常数
最大动能和最大势能为 222max max 11,22n T mw A U kA == 由于22211
22
n mw A kA =,并定
义2
12m T kA =
,故可得max n m U k w T m
=
=。 第四节 有阻尼自由振动
在实际系统中总存在着阻尼,总是有能量的散逸,系统不可能持续作等幅的自由振动,而是随着时间的推移振幅将不断减小,这种自由振动叫做有阻尼自由振动。 最常见的阻尼有粘性阻尼、库伦阻尼或干摩擦阻尼和结构阻尼。 一、粘性阻尼
的一个粘性阻尼器,直径为d ,长为L 的活塞,带有俩个直径为D 的小孔,油的粘度为μ,密度为ρ。
作用于活塞上阻力的大小近似地表示为
v D
d
L p d F d 42
)(44μππ=?=
这表明,粘性阻尼器的阻尼力与速度成正比,方向和速度相反。这是,阻尼系数为
4)(4D
d
L c πμ=
二、粘性阻尼自由振动
具有粘性阻尼的单自由度系统的理论模型,粘性阻尼力与相对速度成正比, 应用牛顿定律,可列出系统的运动方程 0=++kx x c x
m 其中无阻尼固有频率和阻尼比分别是km
c
m k n 2,=
=
ζω
动力学方程:022
=++x x x n n ωζω
系统的特征方程或频率方程
02=++k c m λλ
方程的特征值的表达式可写成
n ωζζλ)11(22,1-±-=
当λ<1这时方程的通解可表示为
)1sin 1cos ()(2221t D t D e t x n n t n ωζωζξω-+-=-
实际阻尼小于临界阻尼的系统叫做欠阻尼系统或弱阻尼系统。
当ζ=1时,系统的阻尼系数等于系统的临界阻尼系数,这种系统叫做临界阻尼系统,系统的运动可表示为
当ζ>1,这时,系统叫做过阻尼系统或强阻尼系统,其特征值为俩个实数,即
n ωζζλ)1(22,1-±-=
三、结构阻尼
内摩擦所消耗的能量等于滞回环所围面积
2cA E πω=?
其中k 是等效弹簧常数,A 是振幅, 等效粘性阻尼系数是
ω
ωβh k c e ==
其中β是无量纲的结构阻尼常数
第五节简谐激励作用下的强迫振动
一、简谐激励力作用下的强迫振动
单自由度系统在简谐激励力作用下的强迫振动的理论模型系统的运动方程为 wt F kx x c x
m sin =++ 式中F 为激励力振幅,w 为激励频率。方程是一个非齐次方程,在一般情况下,
还受到初始条00)0()0(x x x x == ,的作用,实部和虚部分别与wt F cos 0和wt
F sin 0相对应
受力分析
振动微分方程为
jwt Fe kx x c x
m =++ X 为复数变量,分别与wt F cos 0和wt F sin 0相对应,对于此方程的通解等于齐次微分方程的通解与非齐次微分方程特解之和,即暂态响应和稳态响应 假定方程的特解为
jwt S e X t x =)(
式中X 为复振幅,代入方程中,有
?j Xe jwc
m w k F
X -=+-=
2
式中X 为振幅,是复振幅X 的模,继而得到方程的相角?,是复振幅X 的幅角,有
m
w k wc
X Arg 2
1
tan -==-? 因此,方程的特解为
)()(?--=wt j S Xe t x
对于欠阻尼系统,齐次方程的通解为
)sin()(ψζ+=-t w Ae t x d t w h n
因此,对于弱阻尼系统,方程的通解为
h S x x t x +=)(
定义强迫振动的振幅X 与Xo 的比为放大因子,用M 表示,则有
2220)
2()1(1
ζr r X X M +-=
=
式中Xo=F/k,r=w/n w ,Xo 叫做等效静位移,r 叫做频率比。
(类似)
当r →0是,M →1,而与阻尼无关,这意味着,当激励频率接近于零时,振幅与静位移相近。
当r →∞时,M →0,也与阻尼大小无关,在激励频率很高时,振幅趋于零,质量不能跟上力的快速变化,将停留在平衡位置不动。 当r=1时,ζ=0,在理论上M →∞,将产生共振现象。 强迫振动和激励力之间有相位差?,方程可改写成
2121
12tan tan r
r m w k wc -=-=--ζ? 下图便是以ζ为参数,相角?随r ,即w 变化的曲线
二、旋转不平衡质量引起的强迫振动
在许多旋转机械中,转动部分总存在着质量不平衡,所以构建了如下图的系统
列出系统的运动方程为
wt mew kx x c x
M sin 2=++ 系统的放大因子可表示为
2222
)
2()1(ζr r r me MX +-=
其关系曲线表示在图上
第六节 简谐激励强迫振动理论的应用
一、隔振
用来消除对机器、仪器和设备的工作性能产生有害影响振动的措施叫做隔振,隔振分为俩种,积极隔振和消极隔振。 积极隔振:把震源与地基隔离开来以减少它对周围的影响而采取的措施叫做积极隔振。
消极隔振:为了减少外界震动对设备的影响而采取的隔振措施叫做消极隔振。 二、振动测试仪器 1、位移传感器
2、加速度传感器
3、速度传感器
第七节 非简谐激励作用下的系统响应
一、奏起激励作用下的强迫振动
对于线性系统在受到周期激励作用时,系统稳态响应的计算为:
∑∞
=++=++1
0)sin cos (2n n n nwt b nwt a a kx x c x
m 系统的稳态响应为
∑∑∞=∞
=+-+-+-+=112222220)
2()1()cos()2()1(2)(n n n
n n r r b nwt r r k a a t x ζ?ζ
二、非周期激励作用下的系统响应
当系统受到单位脉冲的激励作用下的系统响应为
??
???
???
??<>=-0,00,sin 1)(t t t w e mw t h d t w d n ζ
第三章 两自由度系统
第一节 无阻尼自由振动
一、固有模态振动
凡需要用俩个独立坐标来描述其运动的系统都是两自由度系统
。
由图建立坐标,坐标1x 和2x 是俩个独立的坐标,它们完全描述了系统在任何时刻的运动。根据牛顿定律得
???=-++=-++)()()()(212222121111t F x k x k k x
m t F x k x k k x
m c c c c
?
?????=?????????+-???-++????????????)()(002121212121t F t F x x k k k k k k x x m m c c c c
常数矩阵[]M 和[]K 分别叫做质量矩阵和刚度矩阵。
第二节 无阻尼强迫振动
对于两自由度系统,无阻尼强迫振动运动方程的一般形式可表示为
??????=????????????+????????????)()(2121221221112122211211t F t F x x k k k k x x m m m m
把强迫振动方程写成简明的形式
[]{}[]{}{}wt t F x K x
M sin )(=+ 用{}jwt e F 代替{}wt F sin 方程的解为
{}{}??
????????==--)2(2)
(111)()(α?α?wt j wt j jwt
e X e X e
w X t x
由于现在讨论的事物阻尼系统,1X 和2X 表达中 各元素都是实数,因此,与单自由度系统无阻尼强迫振动相同,对于不同的激励频率,相角1?和2?值分别为0或π,这些曲线分别叫做幅频特性曲线和相频特性曲线。
第三节 无阻尼吸振器
设计安装一个由质量和弹簧都不同的辅助系统~吸振器 。形成的两自由度系统,运动方程为
??????=?????????-???-++????????????00021222212121F x x k k k k k x x m m
解方程,得
???
?
???---+=---+-=2
22211221222222112212221))(()())(()()(k m w k m w k k F k w X k m w k m w k k F
m w k w X
式中,111/m k w =为主系统的固有频率,222/m k w =为吸振器的固有频率,
10/k F X =为主系统的等效静位移。21/m m u =吸振器质量与主系统质量的比。
第四节 有阻尼振动 一、自由振动
一个具有粘性阻尼的两自由度系统 如下图所示
111211212222()()0m x c c x k k x c x k x ++++--= 22222221210m x c x k x c x k x ++--=
把方程写成矩阵形式
11122112
21222222220000m x c c c x k k k x m x c c x k k x +-+-??????????????
++=??????????????--??
???????????? 对于阻尼系统,自由振动运动方程一般形式表示为
[]{}[]{}[]{}{}()g M x C x K x F t ++=
假定方程的解为(){}{}12t t
B x
t B e e B λλ??==?
???
有阻尼振动分别有自由振动、强迫振动组成。与有阻尼单自由度系统相同,由初始条件引起的自由自由振动系统的运动,将随时间不短减小。这表明系统的运动将是振幅按指数函数衰减的简谐运动。两自由度有阻尼系统强迫振动运动对于线性系统,叠加原理在这里也成立,对于系统的稳态响应,用复指数法求解。
第五节 位移方程
一、柔度影响系数
定义弹簧常数为k 的弹簧的柔度系数为 d=1/k
则对于前面讨论的系统的运动方程表示为
????????????+=??????2121
11121F F d d d d d x x 或
{}[]{}F D x =
其中[]D 叫做柔度矩阵,其元2,1,,=j i d ij ,叫做柔度影响系统,定义为
j
i
ij F x d =
2,1,=j i 即,值在j 点作用已单位力时,在i 点引起的位移的大小。利用柔度影响系数的定义,就可以确定系统的柔度矩阵。 对于系统的刚度矩阵,其元素
ij
k ,也叫做刚度影响系数,定义为
j
i
ij x F k =
2,1,=j i 它表明只在j 点产生一单位位移时,在i 点需要施加的力的大小。利用这一定义可以确定系统的刚度矩阵。
[]???-???-+=222
21k k k k k K 对于有阻尼系统,阻尼矩阵的元素~~阻尼影响系数也可按其定义以类似的方法确
定。改写为111
1211122122222()()x d d F t m x x d d F t m x -??????
=??????-??????
因而有 {}[]
{}[]{}()1
()x K F t M x -=-
与位移方程相比较,得()[]1
D K -=
系统的柔度矩阵是系统刚度矩阵的逆矩阵,但系统的刚度必须是非奇异的。
第四章 多自由度系统
第一节 Lagrange 方程
对于许多复杂的机械系统,利用Lagrange 方程去建立系统的运动方程常常是非常有效的。Lagrange 方程的一般形式可表示为
i F q U q D q T q T dt d i i i i =??+??+??-?? )( i=1,2,...,n
式中i q 是广义坐标,对于n 自由度系统有n 个广义坐标。i F 沿广义坐标i q 方向作用的广义力。T 是系统的动能函数,U 是系统的势能函数,D 是系统的散逸函数。
11110
1122n n n n
i j ij i j i j i j i j
u U q q k q q q q =-==???==
? ?????∑∑∑∑ {}[]{}12
T
D q C q =
列出系统的势能、动能和散逸函数后,由Lagrange 方程可得到n 自由度系统的运动方程 []{}[]{}[]{}{})(t F q K q C q
M =++
第二节 无阻尼自由振动和特征值问题
n 个自由度无阻尼系统自由振动的运动方程为
[]{}[]{}{}0=+q K q
M 方程表明,时间函数和空间函数是可以分离的,方程左边与下标i 无关,方程右边与时间无关,因此,其比值一定是一个常数。)(t f 是时间的实函数,比值一定是一个实数,假定为λ,有
∑==-n
j j ij ij
u m k
1
0)(λ
把它写成矩阵的形式,为
[]{}[]{}{}0=-u M u K λ
式中{}[]T
n u u u u 21=也可表示为
[][]{}{}0)(=-u M K λ
解上面两个方程的问题叫做矩阵[]M 和[]K 的特征值问题。 方程的通解为
{}{}[]{}1
()()sin(n
n r r q t q t u A t ωψ===+∑
[]{}{}{}21n u u u u ??=??
第三节 特征向量的正交性和主坐标
对于一个n 自由度系统,其第r 阶特征值2
nr r w =λ对应的特征向量为{}r u ,其第s 阶特征值2nr r w =λ对应的特征向量为{}s u ,它们都满足前面的方程,因而有
[]{}[]{}r nr
r u w M u K 2
= []{}[]{}S nS
S u w M u K 2
= 由于rs ns w w ≠,只有
{}[]
{}s r u M u r T s ≠=,0 同理可以得到
{}[]
{}s r u K u r T s ≠=,0 上两个方程表示了系统特征向量的正交关系,是对质量矩阵 []M ,刚度矩阵[]K 加权正交。必须强调,正交性关系仅当刚度和质量矩阵为对称矩阵时才成立。 由于特征向量{}r u (r=1,2,...,n)的绝对值不是唯一的,振型矩阵也不是唯一的,所以描述系统运动的主坐标也不是唯一的,实际上,可能有无限多组主坐标。
第四节 对初始条件的响应和初值问题 N 自由度无阻尼系统的自由振动表达式为
{}{}[]{}∑=+=+=n
r n r nr r r t w A u t w u A t q 1
)sin()sin()(??
待定常数r A 和r ?,由施加于系统的初始条件决定。
若施加于系统的初始条件{}{}0)0(q q =,{}{}0)0(q q
=则有 t w E t w D t w t w nr r nr r r nr r nr sin cos )sin()sin(+=++??
即
{}[]{}{}[]{}0
1
1
01,q
u w E q u D n
---=
=
第五节 半确定系统
如果有一个系统,它的运动方程为
[]{}[]{}{}0=+q K q
M 变换,用主坐标描述系统的运动,运动的方程成为
n r p k p
m r r r r ,,2,1,0 ==+ 且有r r nr
m k w /2
=,可得 01=p
因而有
t E D p 111+=
1D 和1E 为任意常数。方程表示,整个系统沿主坐标的运动是一个刚体运动,没
有发生弹性变形,它也是系统的一个固有模态运动。当有一个或几个固有频率等
于零的系统叫做半确定系统。并且具有半正定刚度矩阵的系统是一个半确定系统。
第六节 具有等固有频率的系统
机械系统由于结构的对称性或其他原因,系统可能具有重特征值,也就是有相等的固有频率
运动限于xy 平面内,两个弹簧直交并相等。在微幅振动时,系统的运动方程为
2022211=+=+kq q m kq q
m
它们有两个相等的固有频率,是一个退化的系统。
线性代数表明,无论系统是否具有重特征值,系统的所有特征向量有正交关系。 对于重特征值s λ,有下列关系
[][][]0)()()1(=-s t s F f λλ
式中
)
()1(s t F λ-为矩阵
[])(s f λ伴随矩阵的(l-1)阶导数。因而,对于重特征值的l
列特征向量与
)
()1(s t F λ-的l 列非零列成正比。可以利用
)
()1(s t F λ-来确定重特征值
s
λ的特征向量。对于其余非重特征值,仍保持方程中的关系,利用[])
()
1(s t F λ-来
确定其对应的特征向量。
第七节 无阻尼强迫振动和模态分析
一个n 自由度无阻尼系统自由振动的运动方程为
[]{}[]{}{})(t F q K q
M =+ 式中{})(t F 是外激励力向量。如果外激励力时简谐激励力、周期激励力或不同频率的简谐激励力的某种组合时,利用振型矩阵,把描述系统运动的坐标,从一般的广义坐标变成主坐标,把运动方程变成一组n 个独立的方程,叫做模态分析法。使用它使得强迫振动运动方程的求解和分析大为简化。 要解矩阵[]K 和[]M 的特征值问题
[][][][]u K w u M n =2
对质量矩阵归一的正则坐标有
{}[]{}n u q =
由此,得到广义坐标{}q 的一般运动为
{}[]{}{})
()()(1
t n u t n u t q r n
r r ∑===
方程描述了系统过度过程的运动,对于外激励力为简谐函数时,系统的稳态响应是指与外激励力相同频率的响应,对于周期激励力,还包括与其高次谐波有关的响应。
第八节 对基础运动的响应
实际问题中还会碰到由基础运动而引起的振动问题 如图P190
系统的运动的矩阵方程为
?
?????=??????????--???-???-++????????????000021222212121g g x x x x k k k k k x x m m 方程可改写为
[]{}[]{}{})(t F q K q
M g =+ {})(t F g
为因基础运动而施加于各坐标的等效载荷。
有时,基础运动以加速度)(t q
g 表示,现在用相对于基础的坐标1q '和2q ',系统的运动方程为
?
??
???=??????????--???-???-++??????'??????000021222212121g g x x x x k k k k k x x m m 则有
[]{}[]{}[])(t F q K q
M g '='+' 方程在形式完全相同,求解方法也相同,当上面方程的解为相对坐标{}q '的响应,
而绝对坐标{}{}{
}g q q q 1+'=。
上海大学2015 ~2016学年秋季学期研究生课程考试 课程名称:机械动力学课程编号: 09Z078001 论文题目: 机械动力学在机械行业的应用与发展 研究生姓名: 学号: 论文评语: 成绩: 任课教师: 刘树林 评阅日期:
机械动力学在机械行业中的应用及发展 (上海大学机电工程与自动化学院,上海200072) 摘要:机械动力学在实际中的应用有很多方面,应用在机械行业是一个主要方向。机械动力学是数控机床和机器人实现智能化发展的基础之一。本文在阐述机械动力学发展的基础上,结合机器人中的实际应用重点分析。另外,引用最优控制理论的分析方法将会对机械动力学分析有着很大的促进作用。 关键字:机械动力学,机器人,智能化,最优控制 The application and development of mechanical dynamics in machinery industry (Mechanical and electrical engineering and automation, Shanghai University, Shanghai 200072, China) Abstract: Mechanical dynamics in the actual application has many aspects, the application in the machinery industry is a main direction.Mechanical dynamics is one of the foundation for the development of the intelligence of NC machine and robots.In this paper, on the basis of the mechanical dynamics development, we are talking about robots combined with actual application.In addition,the reference analysis method of the optimal control theory will play great role in promoting of mechanical dynamics analysis. Key words: mechanical dynamics; robots; the intelligence;the optimal control 德国政府于2013年提出“工业4.0”的概念(1),推出不久,便引起了全球广泛的关注。“工业4.0”的三大主题:智能工厂、智能生产、智能物流。都离不开智能二字,未来的工业发展的目标也是智能化。中国也在加紧制定自己未来“工业4.0”的发展规划。那么,说到智能工厂、智能生产具体到实际中就是数控机床和机器人的智能化发展。而机械动力学是实现上述规划的发展动力和基础。 1 引言 随着工业的不断发展,机械行业在不断进步的同时(2),也呈现出了一些显著特点是,自动调节和控制装置日益成为机械不可缺少的组成部分。机械动力学的研究对象已扩展到包括不同特性的动力机构和控制调节装置在内的整个机械系统,控制理论已渗入到机械动力学的研究领域。高速、精密机械设计也都呈现了不同的特点,为了保证机械的精确度和稳定性,构件的弹性效应已成为设计中不容忽视的因素。例如,数控机床、机器人、车辆等设计。在某些机械的设计中,已提出变质量的机械动力学问题。各种模拟理论和方法以及运动和动力参数的测试方法,日益成为机械动力学研究的重要手段。 1.1 机械动力学研究的内容 任何机械,在存在运动的同时,都要受到力的作用。所谓机械动力学就是研究机械在力作用下的运动和机械在运动中产生的力,并从力与运动的相互作用的角度进行机械的设计和
机械振动基础试卷 一、填空题(本题15分,每空1分) 1、机械振动大致可分成为:()和非线性振动;确定性振动和();()和强迫振动。 2、在离散系统中,弹性元件储存( ),惯性元件储存(),()元件耗散能量。 3、周期运动的最简单形式是(),它是时间的单一()或()函数。 4、叠加原理是分析( )系统的基础。 5、系统固有频率主要与系统的()和()有关,与系统受到的激励无关。 6、系统的脉冲响应函数和()函数是一对傅里叶变换对,和()函数是一对拉普拉斯变换对。 7、机械振动是指机械或结构在平衡位置附近的( )运动。 二、简答题(本题40分,每小题10分) 1、 简述振动系统的实际阻尼、临界阻尼、阻尼比的联系与区别。 (10分) 2、 共振具体指的是振动系统在什么状态下振动简述其能量集聚过程 (10分) 3、 简述刚度矩阵[K]中元素k ij 的意义。 (10分) 4、 简述随机振动问题的求解方法,以及与周期振动问题求解的区别。 (10分) 三、计算题(45分) 、(14分)如图所示中,两个摩擦轮可分别绕水平轴O 1,O 2 无相对滑动;摩擦轮的半径、质量、转动惯量分别为r 1、m 1、I 1和m 2、I 2。轮2的轮缘上连接一刚度为k 的弹簧,轮1悬挂质量为m 的物体,求: 1)系统微振的固有频率;(10分) 2)系统微振的周期;(4分)。 、(16分)如图所示扭转系统。设转动惯量I 1=I 2,扭转刚度K r1=K r2。 1)写出系统的动能函数和势能函数; (4分) 2)求出系统的刚度矩阵和质量矩阵; (4分) 3)求出系统的固有频率; (4分) 4)求出系统振型矩阵,画出振型图。 (4分) 、(15分)根据如图所示微振系统, 1)求系统的质量矩阵和刚度矩阵和频率方程; (5 分) 2)求出固有频率; (5分) 3)求系统的振型,并做图。 (5分) 参考答案及评分细则: 填空题(本题15分,每空1分) 1、线性振动;随机振动;自由振动; 2、势能;动能;阻尼 图2 图3
省道214郎溪段改建工程五期工程宣广上跨桥梁板首件工程施工总结 安徽水利开发股份有限公司 省道214郎溪段改建工程五期工程项目部 二○一七年九月
目录 一、工程概况 (2) 二、人员机械配置 (4) 三、施工工艺 (5) 四、施工总体概述 (5) 五、各工序施工及检查情况 (5) 六、首件总结得目得 (7) 七、预制箱梁预制施工工艺总结 (7) 八、附件: (8) 宣广高速上跨桥2#-6梁板首件 工程施工总结 为保证工程质量优质,质量目标明确,减少盲目施工,施工前确定标准得施工工艺,施工工艺通过首件施工确定。 为确保我合同段内得梁板预制工程质量成功率达到100%得目标,我项目部根据现场实际情况选定宣广高速上跨桥2#-6梁板为我项目首件梁板开工工程。目前已按要求施工完毕。 一、工程概况 宣广高速上跨桥位于宣城市郎溪县,上跨沪渝高速,就是S214郎溪段改建
工程五期工程公路上得一座跨高速关键性桥梁。宣广高速上跨桥全长127m,大桥钢筋混凝土连续箱梁,柱式桥墩、桩基础,上部结构采用4-30m预应力混凝土箱梁,共计32片梁板。 本标段共有梁板196片其中30m箱梁112片,25m箱梁64片,20m箱梁20片不包含K42+860徽杭铁路上跨桥。首件箱梁,2-6跨中梁,梁长29、475m,梁高1、6m,板宽2、4m,主要工程数量如下: 宣广高速上跨桥2-6梁板作为我项目首件开工梁板预制工程,项目部于2017年8月26日—27日扎底板钢筋,8月28号拼装模板内外模板,9月5号下午吊装底板钢筋,拼装内模,9月6号上午绑扎顶板钢筋,9月6号下午16时15分
开始浇筑至20时10分浇筑完成,9月6号晚22时拆内模,9月8号上午拆外模养生由于梁板强度需时间限制,本首件总结未含强度报告。 二、人员机械配置
一. 教案内容: 第十一章机械振动 本章知识复习归纳 二. 重点、难点解读 (一)机械振动 物体(质点)在某一中心位置两侧所做的往复运动就叫做机械振动,物体能够围绕着平衡位置做往复运动,必然受到使它能够回到平衡位置的力即回复力。回复力是以效果命名的力,它可以是一个力或一个力的分力,也可以是几个力的合力。 产生振动的必要条件是:a、物体离开平衡位置后要受到回复力作用。b、阻力足够小。 (二)简谐振动 1. 定义:物体在跟位移成正比,并且总是指向平衡位置的回复力作用下的振动叫简谐振动。简谐振动是最简单,最基本的振动。研究简谐振动物体的位置,常常建立以中心位置(平衡位置)为原点的坐标系,把物体的位移定义为物体偏离开坐标原点的位移。因此简谐振动也可说是物体在跟位移大小成正比,方向跟位移相反的回复力作用下的振动,即F=-kx,其中“-”号表示力方向跟位移方向相反。 2. 简谐振动的条件:物体必须受到大小跟离开平衡位置的位移成正比,方向跟位移方向相反的回复力作用。 3. 简谐振动是一种机械运动,有关机械运动的概念和规律都适用,简谐振动的特点在于它是一种周期性运动,它的位移、回复力、速度、加速度以及动能和势能(重力势能和弹性势能)都随时间做周期性变化。 (三)描述振动的物理量,简谐振动是一种周期性运动,描述系统的整体的振动情况常引入下面几个物理量。 1. 振幅:振幅是振动物体离开平衡位置的最大距离,常用字母“A”表示,它是标量,为正值,振幅是表示振动强弱的物理量,振幅的大小表示了振动系统总机械能的大小,简谐振动在振动过程中,动能和势能相互转化而总机械能守恒。 2. 周期和频率,周期是振子完成一次全振动的时间,频率是一秒钟内振子完成全振动的次数。振动的周期T跟频率f之间是倒数关系,即T=1/f。振动的周期和频率都是描述振动快慢的物理量,简谐振动的周期和频率是由振动物体本身性质决定的,与振幅无关,所以又叫固有周期和固有频率。 (四)单摆:摆角小于5°的单摆是典型的简谐振动。 细线的一端固定在悬点,另一端拴一个小球,忽略线的伸缩和质量,球的直径远小于悬线长度的装置叫单摆。单摆做简谐振动的条件是:最大摆角小于5°,单摆的回复力F是重力在圆弧切线 方向的分力。单摆的周期公式是T=。由公式可知单摆做简谐振动的固有周期与振幅,摆球质量无关,只与L和g有关,其中L是摆长,是悬点到摆球球心的距离。g是单摆所在处的重力加速度,在有加速度的系统中(如悬挂在升降机中的单摆)其g应为等效加速度。 (五)振动图象。 简谐振动的图象是振子振动的位移随时间变化的函数图象。所建坐标系中横轴表示时间,纵轴表
目录 一、编制依据及目的 (2) 1、编制依据 (2) 2、编制目的 (2) 二、首件工程概况 (2) 1、工程概况 (2) 三、首件工程人员和设备 (3) 四、首件工程的施工工艺 (4) 1、基坑开挖 (4) 2、基坑排水 (4) 3、基坑处理 (4) 4、基础浇注 (4) 5、框架箱涵涵身施工 (5) 五、首件成果 (7) 六、首件总结 (10)
一、编制依据及目的 1、编制依据 1.1、客货共线铁路桥涵工程施工技术指南。(TZ 203-2008) 1.2、铁路桥涵工程施工质量验收标准。(TB 10415-2003) 1.3、钢筋混凝土框架箱涵。(同桥施涵-07-01) 1.4、已审批的施工组织设计。 1.5、其他相关的法律、法规、规范及设计文件。 2、编制目的 通过首件示范工程,可以评估不同环境下进行的工程,在材料、人员、设备、工艺、地理条件、安全环保要求等均发生了变化时,对工程质量的影响程度。 通过首件示范工程的实施,便于施工单位施工工艺组合,总结经验,加强管理,为规范化施工创造条件。 通过首件示范工程的实施,可预见施工中遇到的各种问题,特别是解决有可能影响工程质量的各种因素,对出现的问题及时处理,减少施工单位的损失,避免施工后期造成返工。 通过首件示范工程的实施,熟悉设计规范和技术要求,根据项目特点,确定质量等级及验收标准,落实建设单位对具体分项(分部)工程的特殊要求。 二、首件工程概况 1、工程概况 同江中俄铁路大桥工程位于黑龙江省同江市与俄罗斯列宁斯阔耶市之间,铁路特大桥将连通向阳川~哈鱼岛铁路与俄罗斯西伯利亚铁路列宁斯阔耶支线。 本线路自同江地方铁路二期头村附近K50+400 起,向东北取直设换装站,在三村附近跨同抚大堤,后利用既有铁路位置行进。 本标段框构桥6座,合计1562.99m2;框架涵13座,合计414.49m;框构小桥、框架箱涵采用整体立模现浇; 首件工程选取 框架箱涵首件工程选取地点DK51+853.7 (1-6m)钢筋混凝土框架箱涵。
机械振动论文机械振动论文 浅谈京石高速铁路客运专线CFG桩的施工 摘要: CFG桩是水泥粉煤灰碎石桩的简称,一般有三种成桩施工方法:即振动沉管灌注成桩、长螺旋钻孔灌注成桩和长螺旋钻孔管内泵压混合料灌注成桩。介绍成桩试验的机械选择、材料及配合比、施工过程及工艺流程。 关键词:高速铁路;CFG桩;工艺性试验 工程概况:由中铁十二局集团承建的京石高铁客运专线JS-4标段第三项目经理部全长12.6公里,新建路基2.36km,采用长螺旋钻机成孔泵送混合料CFG桩施工。 1 CFG桩施工工艺及现场在各阶段的质量控制要点 长螺旋钻机成孔泵送混合料施工CFG桩施工工艺及施工顺序:1)钻机就位:钻机就位后,应使钻杆垂直对准桩位中心,确保CFG桩垂直度容许偏差不大于1%。现场控制采用在钻架上挂垂球的方法测量该孔的垂直度,也可采用钻机自带垂直度调整器控制钻杆垂直度。2)钻进成孔:钻孔开始时,关闭钻头阀门,向下移动钻杆至钻头触地时,启动马达钻进,先慢后快,同时检查钻孔的偏差并及时纠正。在成孔过程中发现钻杆摇晃或难钻时,应放慢进尺,防止桩孔偏斜、位移和钻具损坏。根据钻机塔身上的进尺标记,成孔到达设计标高时,停止钻进。3)混合料搅拌:混合料搅拌必须进行集中拌和,按照配合比进行配料,每盘料搅拌时间按照普通混凝土的搅拌时间进
行控制。混合料出厂时塌落度可控制在160mm~200mm。4)灌注及拔管:钻孔至设计标高后,停止钻进,提拔钻杆20~30cm后开始泵送混合料灌注,每根桩的投料量应不小于设计灌注量。钻杆芯管充满混合料后开始拔管,并保证连续拔管。施工桩顶高程宜高出设计高程30~50cm,灌注成桩完成后,桩顶盖土封顶进行养护。5)移机:灌注时采用静止提拔钻杆(不能边行走边提拔钻杆),提管速度控制在2-3米/分钟,灌注达到控制标高后进行至下一根桩的施工。 2 铁路客专《验标》对长螺旋钻施工CFG桩质量要求 1)施工前应进行成桩工艺性试验(不少于2根试验桩),以复核地质资料以及机械设备性能、施工工艺、施打顺序是否适宜,确定混合料配合比、塌落度、搅拌时间、拔管速度等各项工艺参数,根据试桩中发现的问题修订施工工艺。2)在工程施工前,所选用的设备型号应符合设计桩经、设计加固深度的要求。3)现场施工的CFG桩数量、布置形式及间距应符合设计要求。桩长、桩顶标高及直径应符合设计要求。4)钻机应先慢后快。在成孔过程中,如发现钻杆摇晃或难钻时,应放慢进尺,否则容易导致桩孔偏斜、位移,甚至使钻杆、钻具损坏。5)混合料应按设计配合比经搅拌机拌和,塌落度、拌和时间应按工艺性试验确定的参数进行控制,且不得少于一分钟。6)CFG桩成孔到设计标高后,停止钻进,开始泵送混合料。先拔管20cm~30cm后开始泵送混合料,当钻杆芯充满混合料后开始拔管,严禁先提管后泵料。成桩时的拔管速度控制在2-3米/分钟。成桩过程应连
G207线道县祥霖铺至江华界牌井公路改建工程项目 “首件工程认可制”实施细则 为了加强工程施工质量(内在质量、外观质量、档案质量)的管理,努力消除质量事故隐患,杜绝质量通病,进一步提高现场管理水平,依据《湖南省干线公路建设实施首件工程认可制指导意见》(湘路工建[2010])241号,下文简称“指导意见”)及省、市公路局的相关规定,特制定本实施细则。 本细则主要按“指导意见”,对其部分章节进行细化、补充、完善而编制成。 一、关于“首件工程的目的和作用”的深层认识 1、由于不同的工程项目是在不同的环境下进行的,材料、人员、设备、工艺、地理条件、安全环保要求等均发生了变化,这些变化将不同程度地影响到工程质量,通过首件制工程,可以评价对工程质量影响程度。 2、通过首件工程的实施,便于承包人施工工艺组合,总结经验,加强管理,为规范化施工创造条件。 3、通过首件工程的实施,可预见施工中遇到的各种问题,特别是
解决有可能影响工程质量的各种因素,对出现的问题及时处理,减少了承包人的损失,避免施工后期造成返工。 4、通过首件工程的实施,熟悉设计规范和技术要求,根据项目特点,确定表面质量等级及验收标准,落实业主对具体分项的特殊要求。 二、首件工程认可组织机构 首件工程检评工作组由以下单位的全部或部分组成: 1、项目业主质量监督组(总监办); 2、监理单位:驻地监理处; 3、施工单位项目部 总监办及驻地监理处负责对施工方案、工艺方案、安全措施、工程材料进行审核并监督实施,统一报检程序和检表格式,对首件工程进行初检。经施工单位初检后,驻监处初检后,总监办牵头由相关单位组成质量检评组,对首件工程进行全面检查验收。 三、“首件工程认可制”的评价标准 1、业主用于质量管理与控制的相关文件规定,及业主对所属工程项目招标文件; 2、《公路工程质量检验评定标准》(JTG F80/1-2004)和有关规范; 3、湖南省交通运输厅制定的有关制度和办法。 四、首件工程申报、实施、检查验收流程
机械振动 1、判断简谐振动的方法 简谐运动:物体在跟偏离平衡位置的位移大小成正比,并且总指向平衡位置的回复力的作用下的振动。特征是:F=-kx,a=-kx/m. 要判定一个物体的运动是简谐运动,首先要判定这个物体的运动是机械振动,即看这个物体是不是做的往复运动;看这个物体在运动过程中有没有平衡位置;看当物体离开平衡位置时,会不会受到指向平衡位置的回复力作用,物体在运动中受到的阻力是不是足够小。 然后再找出平衡位置并以平衡位置为原点建立坐标系,再让物体沿着x 轴的正方向偏离平衡位置,求出物体所受回复力的大小,若回复力为F=-kx,则该物体的运动是简谐运动。 2、简谐运动中各物理量的变化特点 简谐运动涉及到的物理量较多,但都与简谐运动物体相对平衡位置的位移x 存在直接或间接关系: 如果弄清了上述关系,就很容易判断各物理量的变化情况 3、简谐运动的对称性 简谐运动的对称性是指振子经过关于平衡位置对称的两位置时,振子的位移、回复力、加速度、动能、势能、速度、动量等均是等大的(位移、回复力、加速度的方向相反,速度动量的方向不确定)。运动时间也具有对称性,即在平衡位置对称两段位移间运动的时间相等。 理解好对称性这一点对解决有关问题很有帮助。 4、简谐运动的周期性 5、简谐运动图象 简谐运动图象能够反映简谐运动的运动规律,因此将简谐运动图象跟具体运动过程联系起来是讨论简谐运动的一种好方法。 6、受迫振动与共振 (1)、受迫振动:物体在周期性驱动力作用下的振动,其振动频率和固有频率无关,等于驱动力的频率;受迫振动是等幅振动,振动物体因克服摩擦或其它阻力做功而消耗振动能量刚好由周期性的驱动力做功给予补充,维持其做等幅振动。 位移x 回复力F=-Kx 加速度a=-Kx/m 位移x 势能E p =Kx 2/2 动能E k =E-Kx 2/2 速度m E V K 2
首件工程施工总结 集团文件版本号:(M928-T898-M248-WU2669-I2896-DQ586-M1988)
目录 一、编制依据及目的 1、编制依据 1.1、客货共线铁路桥涵工程施工技术指南。(TZ 203-2008) 1.2、铁路桥涵工程施工质量验收标准。(TB 10415-2003) 1.3、钢筋混凝土框架箱涵。(同桥施涵-07-01) 1.4、已审批的施工组织设计。
1.5、其他相关的法律、法规、规范及设计文件。 2、编制目的 通过首件示范工程,可以评估不同环境下进行的工程,在材料、人员、设备、工艺、地理条件、安全环保要求等均发生了变化时,对工程质量的影响程度。 通过首件示范工程的实施,便于施工单位施工工艺组合,总结经验,加强管理,为规范化施工创造条件。 通过首件示范工程的实施,可预见施工中遇到的各种问题,特别是解决有可能影响工程质量的各种因素,对出现的问题及时处理,减少施工单位的损失,避免施工后期造成返工。 通过首件示范工程的实施,熟悉设计规范和技术要求,根据项目特点,确定质量等级及验收标准,落实建设单位对具体分项(分部)工程的特殊要求。 二、首件工程概况 1、工程概况 同江中俄铁路大桥工程位于黑龙江省同江市与俄罗斯列宁斯阔耶市之间,铁路特大桥将连通向阳川~哈鱼岛铁路与俄罗斯西伯利亚铁路列宁斯阔耶支线。 本线路自同江地方铁路二期头村附近K50+400 起,向东北取直设换装站,在三村附近跨同抚大堤,后利用既有铁路位置行进。 本标段框构桥6座,合计1562.99m2;框架涵13座,合计414.49m;框构小桥、框架箱涵采用整体立模现浇; 首件工程选取 框架箱涵首件工程选取地点DK51+853.7 (1-6m)钢筋混凝土框架箱涵。
谈振动利用工程的认识及应用举例 作者姓名:刘营 作者学号:1200462 指导教师:李朝峰 东北大学机械工程与自动化学院 东北大学 2012年11月
Talk About The Vibration Application Engineering And Application Examples By Liu Ying Northeastern University November 2012
摘要 在一般情况下,振动是一种不需要的、有害的现象,应该加以消除或隔绝,但在很多场合,振动是需要的和有益的,应该加以利用。随着现代科技的进步,消振、减振、隔振、降噪的研究得到了迅速的发展,并在实际中得到大量的应用,对提高产品质量和保护生产环境起到了很好的保证作用。而振动利用的研究,也取得了丰硕成果,在工程领域中得到了广泛应用,出现了一批利用振动的振动机械,以及各种振动加工技术,并且由于近代科学发展和学科交叉,振动利用的研究和应用已经和许多学科结合跨出了工程领域,进人了社会经济领域及自然界振动利用领域的扩展,充实了振动工程学科的内涵,说明人们已经由认识振动,控制振动发展到利用振动来改造世界。这是一个更为重要的转变,必将进一步推动振动工程的发展,更好地造福于人类。 关键词:振动;机械;振动利用工程
Abstract Usually, vibration is a harmful phenomenon that we don't need and should be eliminated in our life. But in many cases, vibration is beneficial to us and should be used. Along with the progress of modern science and technology, vibration reduction, vibration isolation, noise reduction research have got a rapid development and a lot of application have been used in our life. This play a good role in improving product quality and protecting the environment. And the research of vibration using have made great achievements. It get a wide range of applications in engineering field. This result in a batch of using of the vibration of mechanical vibration, and various vibration processing technology. Because of the modern scientific development and course cross, the research and application of vibration using have combined with a cultural and engineering field and expand the vibration field. This enrichs the connotation of the vibration engineering discipline and explains people has realized that we can use and control the vibration to change our world. This is a very important change and will promote the development of vibration engineering to benefit mankind. Keywords: vibration; machinery; vibration using engineering
试举出振动设计、系统识别和环境预测的实例。 如果把双轴汽车的质量分别离散到前、后轴上去,在考虑悬架质量和非悬架质量两个离散质量的情况下,画出前轴或后轴垂直振动的振动模型简图,并指出在这种化简情况下,汽车振动有几个自由度?
设有两个刚度分别为1k ,2k 的线性弹簧如图T —所示,试证明: 1)它们并联时的总刚度eq k 为:21k k k eq += 2)它们串联时的总刚度eq k 满足: 2 1111k k k eq += 解:1)对系统施加力P ,则两个弹簧的变形相同为x ,但受力不同,分别为: 1122P k x P k x =?? =? 由力的平衡有:1212()P P P k k x =+=+ 故等效刚度为:12eq P k k k x = =+ 2)对系统施加力P ,则两个弹簧的变形为: 11 22P x k P x k ?=??? ?=?? ,弹簧的总变形为:1212 11()x x x P k k =+=+ 故等效刚度为:122112 111 eq k k P k x k k k k ===++
求图所示扭转系统的总刚度。两个串联的轴的扭转刚度分别为1t k ,2t k 。 解:对系统施加扭矩T ,则两轴的转角为: 11 22t t T k T k θθ?=??? ?=?? 系统的总转角为: 1212 11 ( )t t T k k θθθ=+=+, 12111()eq t t k T k k θ==+ 故等效刚度为: 12 111 eq t t k k k =+
两只减振器的粘性阻尼系数分别为1c ,2c ,试计算总粘性阻尼系数eq c 1)在两只减振器并联时, 2)在两只减振器串联时。 解:1)对系统施加力P ,则两个减振器的速度同为x &,受力分别为: 1122 P c x P c x =?? =?&& 由力的平衡有:1212()P P P c c x =+=+& 故等效刚度为:12eq P c c c x = =+& 2)对系统施加力P ,则两个减振器的速度为: 11 22P x c P x c ? =????=?? &&,系统的总速度为:12 12 11()x x x P c c =+=+&&& 故等效刚度为:12 11 eq P c x c c = =+&
公路路面工程合同 中粒式沥青混凝土AC-20中面层 试验段总结报告 编制: 审核: 审批: 有限公司 高速公路路面工程合同项目经理部 二〇二〇年四月
目录 一、试验段概况 (3) 二、批准的目标和生产配合比 (3) 1、原材料质量 (3) 2、目标配合比 (3) 3、生产配合比 (4) 三、施工组织及进度计划 (4) 1、人员分工 (4) 2、机械投入 (5) 3、测量、试验设备 (5) 四、混合料拌和 (6) 五、混合料摊铺 (6) 1、摊铺作业 (6) 2、混合料碾压 (7) 3、松浦系数的确定 (9) 4、消除离析的技术措施 (9) 5、接缝处理 (9) 6、技术指标 (10) 六、存在问题 (13) 七、结论意见 (14) 八、质量控制要点 (14) 九、安全组织保证措施 (15)
一、试验段概况 高速路面工程合同中面层首件桩号AK0+171.5-AK0+189.298,长度189.298m,施工时间2019年11月23日,天气晴转阴,北风3级,温度12-21试验段位置位于莱阳西互通B匝道,结构形式为中粒式沥青混凝土AC-20中面层,SBS改性沥青,净宽度7.0m,厚度6cm。 二、批准的目标和生产配合比 1、原材料质量 (1)粗集料:石灰岩、产地栖霞,洁净、干燥、无风化、无杂质,具有足够的强度和耐磨耗的性能,石质坚硬、抗击性能好,具有良好的颗粒形状。 (2)细集料:石灰岩、洁净、干燥、无风化、无杂质,并有适当颗粒级配。所有细集料采用除尘装置。 (3)石灰粉:采用优质石灰岩磨制而成,原石料中的泥土杂质除净。矿粉干燥、洁净,并能自由地从矿粉仓流出,矿粉的塑性指数不得大于4%。 (4)沥青:采用齐鲁交通材料技术开发有限公司生产的SBS改性沥青,经抽样试验各项指标符合规范要求。进场沥青测绘出关系曲线,确定施工温度,每车取样检测三大指标(软化点、针入度、延度),试验检测合格后方可卸入沥青罐中。 2、目标配合比 试验结果:根据目标配合比测得析漏为18%,孔隙率17.2%,飞散16.6%,密度
机械振动和机械波 一、知识结构 二、重点知识回顾 1机械振动 (一)机械振动 物体(质点)在某一中心位置两侧所做的往复运动就叫做机械振动,物体能够围绕着平衡位置做往复运动,必然受到使它能够回到平衡位置的力即回复力。回复力是以效果命名的力,它可以是一个力或一个力的分力,也可以是几个力的合力。 产生振动的必要条件是:a、物体离开平衡位置后要受到回复力作用。b、阻力足够小。 (二)简谐振动 1. 定义:物体在跟位移成正比,并且总是指向平衡位置的回复力作用下的振动叫简谐振动。简谐振动是最简单,最基本的振动。研究简谐振动物体的位置,常常建立以中心位置(平衡位置)为原点的坐标系,把物体的位移定义为物体偏离开坐标原点的位移。因此简谐振动也可说是物体在跟位移大小成正比,方向跟位移相反的回复力作用下的振动,即F=-k x,其中“-”号表示力方向跟位移方向相反。 2. 简谐振动的条件:物体必须受到大小跟离开平衡位置的位移成正比,方向跟位移方向相反的回复力作用。 3. 简谐振动是一种机械运动,有关机械运动的概念和规律都适用,简谐振动的特点在于它是一种周期性运动,它的位移、回复力、速度、加速度以及动能和势能(重力势能和弹性势能)都随时间做周期性变化。 (三)描述振动的物理量,简谐振动是一种周期性运动,描述系统的整体的振动情况常引入下面几个物理量。
1. 振幅:振幅是振动物体离开平衡位置的最大距离,常用字母“A”表示,它是标量,为正值,振幅是表示振动强弱的物理量,振幅的大小表示了振动系统总机械能的大小,简谐振动在振动过程中,动能和势能相互转化而总机械能守恒。 2. 周期和频率,周期是振子完成一次全振动的时间,频率是一秒钟内振子完成全振动的次数。振动的周期T跟频率f之间是倒数关系,即T=1/f。振动的周期和频率都是描述振动快慢的物理量,简谐振动的周期和频率是由振动物体本身性质决定的,与振幅无关,所以又叫固有周期和固有频率。 (四)单摆:摆角小于5°的单摆是典型的简谐振动。 细线的一端固定在悬点,另一端拴一个小球,忽略线的伸缩和质量,球的直径远小于悬线长度的装置叫单摆。单摆做简谐振动的条件是:最大摆角小于5°,单摆的回复力F是重力在 圆弧切线方向的分力。单摆的周期公式是T=。由公式可知单摆做简谐振动的固有周期与振幅,摆球质量无关,只与L和g有关,其中L是摆长,是悬点到摆球球心的距离。g是单摆所在处的重力加速度,在有加速度的系统中(如悬挂在升降机中的单摆)其g应为等效加速度。 (五)振动图象。 简谐振动的图象是振子振动的位移随时间变化的函数图象。所建坐标系中横轴表示时间,纵轴表示位移。图象是正弦或余弦函数图象,它直观地反映出简谐振动的位移随时间作周期性变化的规律。要把质点的振动过程和振动图象联系起来,从图象可以得到振子在不同时刻或不同位置时位移、速度、加速度,回复力等的变化情况。 (六)机械振动的应用——受迫振动和共振现象的分析 (1)物体在周期性的外力(策动力)作用下的振动叫做受迫振动,受迫振动的频率在振动稳定后总是等于外界策动力的频率,与物体的固有频率无关。 (2)在受迫振动中,策动力的频率与物体的固有频率相等时,振幅最大,这种现象叫共振,声音的共振现象叫做共鸣。 2机械波中的应用问题 1. 理解机械波的形成及其概念。 (1)机械波产生的必要条件是:<1>有振动的波源;<2>有传播振动的媒质。 (2)机械波的特点:后一质点重复前一质点的运动,各质点的周期、频率及起振方向都与波源相同。 (3)机械波运动的特点:机械波是一种运动形式的传播,振动的能量被传递,但参与振动的质点仍在原平衡位置附近振动并没有随波迁移。 (4)描述机械波的物理量关系:v T f ==? λ λ 注:各质点的振动与波源相同,波的频率和周期就是振源的频率和周期,与传播波的介质无关,波速取决于质点被带动的“难易”,由媒质的性质决定。 2. 会用图像法分析机械振动和机械波。 振动图像,例:波的图像,例: 振动图像与波的图像的区别横坐标表示质点的振动时间横坐标表示介质中各质点的平衡位置 表征单个质点振动的位移随时间变 化的规律 表征大量质点在同一时刻相对于平衡位 置的位移 相邻的两个振动状态始终相同的质 点间的距离表示振动质点的振动周 期。例:T s =4 相邻的两个振动始终同向的质点间的距 离表示波长。例:λ=8m
武汉至深圳高速公路嘉通段TJ-7合同段(K85+467.6~K93+038.944) 盖板涵首件工程施工总结报告 编制: 审核: 中交第公路工程局有限公司 武深高速公路嘉通段X标项目经理部
目录 2一、编制依据 ............................................................................................................... 2 二、首件工程目的 ....................................................................................................... 三、首件工程概况 ....................................................................................................... 2四、机械设备、人员、材料情况 (2) 5 五、施工技术参数 ....................................................................................................... 六、施工工艺、方法、控制要点及质量标准 (5) 16七、质量保证措施 ..................................................................................................... 18 八、安全保证措施 ..................................................................................................... 九、施工中技术用用 ................................................................................................. 21 22十、首件工程总结 .....................................................................................................
机械振动习题解答(四)·连续系统的振动 连续系统振动的公式小结: 1 自由振动分析 杆的拉压、轴的扭转、弦的弯曲振动微分方程 22 222y y c t x ??=?? (1) 此式为一维波动方程。式中,对杆,y 为轴向变形,c =;对轴,y 为扭转 角,c ;对弦,y 为弯曲挠度,c 令(,)()i t y x t Y x e ω=,Y (x )为振型函数,代入式(1)得 20, /Y k Y k c ω''+== (2) 式(2)的解为 12()cos sin Y x C kx C kx =+ (3) 将式(3)代入边界条件,可得频率方程,并由此求出各阶固有频率ωn ,及对应 的振型函数Y n (x )。可能的边界条件有 /00, 0/0p EA y x Y Y GI y x ??=??? ?'=?=????=???? 对杆,轴向力固定端自由端对轴,扭矩 (4) 类似地,梁的弯曲振动微分方程 24240y y A EI t x ρ??+=?? (5) 振型函数满足 (4)4420, A Y k Y k EI ρω-== (6) 式(6)的解为 1234()cos sin cosh sinh Y x C kx C kx C kx C kx =+++ (7) 梁的弯曲挠度y (x , t ),转角/y x θ=??,弯矩22/M EI y x =??,剪力 33//Q M x EI y x =??=??。所以梁的可能的边界条件有 000Y Y Y Y Y Y ''''''''======固定端,简支端,自由端 (8) 2 受迫振动 杆、轴、弦的受迫振动微分方程分别为 222222222222(,) (,), (,) p p u u A EA f x t t x J GI f x t J I t x y y T f x t t x ρθθ ρρ??=+????=+=????=+??杆:轴:弦: (9) 下面以弦为例。令1 (,)()()n n n y x t Y x t ?∞==∑,其中振型函数Y n (x )满足式(2)和式(3)。代入式(9)得 1 1 (,)n n n n n n Y T Y f x t ρ??∞ ∞ ==''-=∑∑ (10) 考虑到式(2),式(10)可改写为 21 1 (,)n n n n n n n Y T k Y f x t ρ??∞ ∞ ==+=∑∑ (11) 对式(11)两边乘以Y m ,再对x 沿长度积分,并利用振型函数的正交性,得 2220 (,)l l l n n n n n n Y dx Tk Y dx Y f x t dx ρ??+=???
机械运动知识点总结公司内部档案编码:[OPPTR-OPPT28-OPPTL98-OPPNN08]
1、机械运动 (1)参照物 人们判断物体是运动的还是静止的,总是先选取某一物体作为标准,相对于这个标准,如果物体的位置发生了改变,就认为它是运动的;否则,就认为它是静止的。这个被选作标准的物体叫做参照物。(2)机械运动 物理学中把一个物体相对于参照物位置的改变,叫做机械运动,简称为运动。 2.运动和静止 (1)由于运动的描述与参照物有关,所以运动和静止都是相对的。(2)自然界中的一切物体都是运动的,没有绝对静止的物体。平时所说物体是“运动的”或“静止的”都是相对于参照物而言的,这就是运动的相对性。 3.机械运动的分类 (1)根据物体运动的路线,可以将物体的运动分为直线运动和曲线运动。 (2)直线运动,可以分为匀速直线运动和变速直线运动。 匀速直线运动:在相同时间内通过的路程相等,运动快慢保持不变。 变速直线运动:在相同时间内通过的路程不相等,运动快慢发生了变化
4.速度 (1)定义:物体在单位时间内通过的路程叫做速度。可见,速度可以定量描述物体运动的快慢。 路程 (2)公式:速度= 时间 s 用s表示路程,t表示时间,v表示速度,则速度公式可表示为:v= t (3)单位:如果路程的单位取米,时间的一单位取秒,那么,由速度公式可以推出速度的单位是米/秒,符一号为m/s,读作米每秒。常用的速度单位还有千米/时,符号为Km/h,读作千米每时。 5.参照物的选取及有关物体运动方向的判断 (1)位置的变化判断 一个物体相对于另一个物体,如果其方位发生了变化或距离发生了变化,则这个物体相对于参照物的位置就发生了变化。 (2)如果两个物体同向运动,以速度大的物体为参照物,则速度小的物体向相反方向运动。 6.比较物体运动快慢的方法 (1)在通过的路程相同时,用运动时间比较运动的快慢。在路程相同时,所用时间短的物体运动快,所用时间长的物体运动慢。 (2)在运动时间相同时,用路程比较物体运动的快慢。即在时间相同时,通过路程越长的物体运动得越快,通过路程越短的物体运动得越慢。
目录 一、编制依据及目的 ...................................... 1、编制依据 ........................................... 2、编制目的 ........................................... 二、首件工程概况 ........................................ 1、工程概况 ........................................... 三、首件工程人员和设备 .................................. 四、首件工程的施工工艺 ................................... 1、基坑开挖 ........................................... 2、基坑排水 ........................................... 3、基坑处理 ........................................... 4、基础浇注 ........................................... 5、框架箱涵涵身施工 .................................... 五、首件成果 ...........................................
六、首件总结 ........................................... 编制依据及目的一、1、编制依据 1.1、客货共线铁路桥涵工程施工技术指南。(TZ 203-2008) 1.2、铁路桥涵工程施工质量验收标准。(TB 10415-2003) 1.3、钢筋混凝土框架箱涵。(同桥施涵-07-01) 1.4、已审批的施工组织设计。 1.5、其他相关的法律、法规、规范及设计文件。 、编制目的2. 通过首件示范工程,可以评估不同环境下进行的工程,在材料、人员、设备、工艺、地理条件、安全环保要求等均发生了变化时,对工程质量的影响程度。 通过首件示范工程的实施,便于施工单位施工工艺组合,总结经验,加强管理,为规范化施工创造条件。 通过首件示范工程的实施,可预见施工中遇到的各种问题,特别是解决有可能影响工程质量的各种因素,对出现的问题及时处理,减少施工单位的损失,避免施工后期造成返工。 通过首件示范工程的实施,熟悉设计规范和技术要求,根据项目特点,确定质量等级及验收标准,落实建设单位对具体分项(分部)工程的特殊要求。 二、首件工程概况 1、工程概况 同江中俄铁路大桥工程位于黑龙江省同江市与俄罗斯列宁斯阔耶市之间,铁路特大桥将连通向阳川~哈鱼岛铁路与俄罗斯西伯利亚铁路列宁斯阔耶支线。 本线路自同江地方铁路二期头村附近K50+400 起,向东北取直设换装站,在三村附近跨同抚大堤,后利用既有铁路位置行进。 2;框架涵13座,合计合计 1562.99m414.49m;框构小桥、框本标段框构桥6座,架箱涵采用整体立模现浇; 首件工程选取 框架箱涵首件工程选取地点DK51+853.7 (1-6m)钢筋混凝土框架箱涵。 三、首件工程人员和设备 首件工程管理人员投入情况