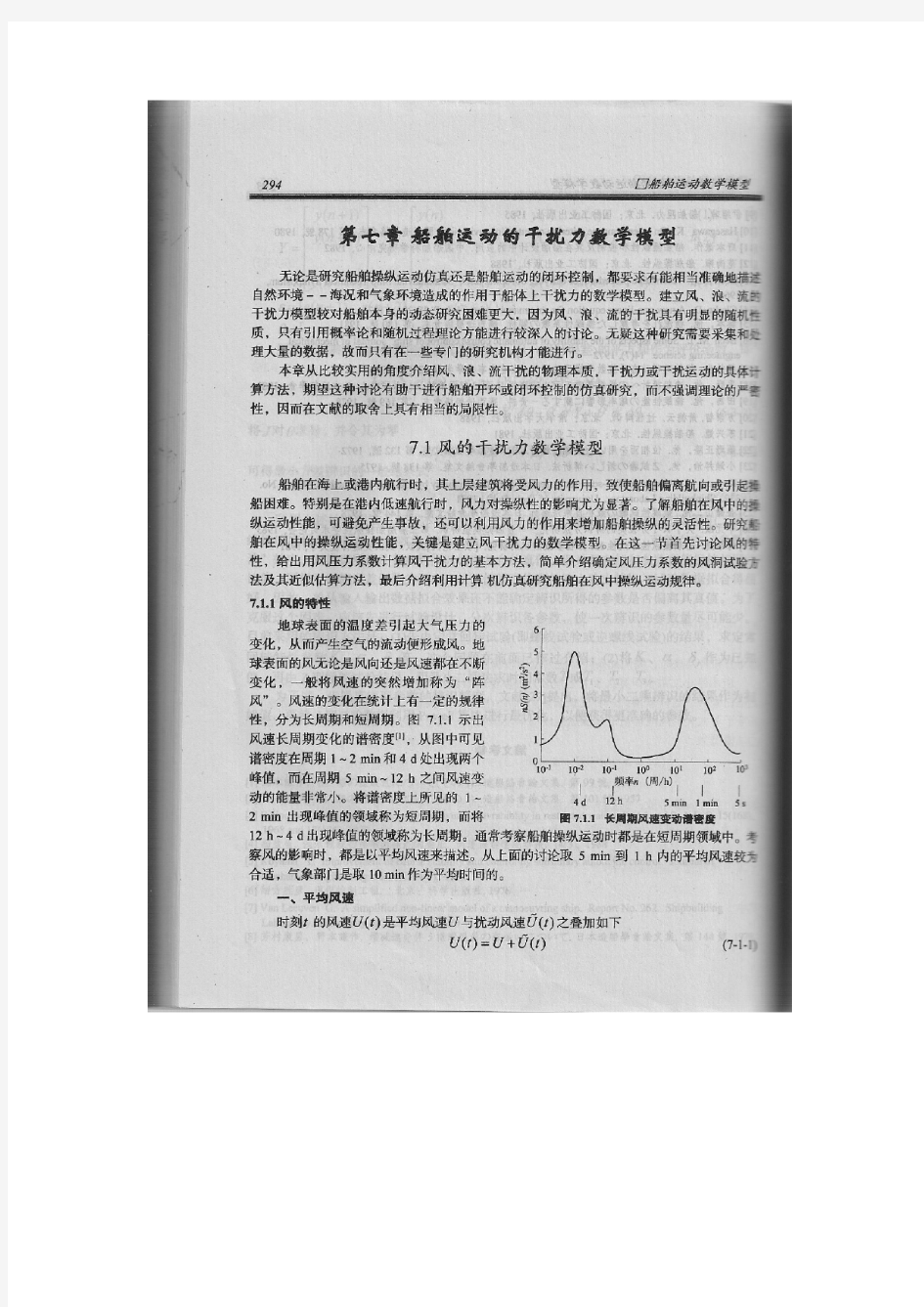
附件: 大型船舶操纵模拟器技术需求书 一、设备总体要求 1、大型船舶操纵模拟器包括: 1)教练员控制站1套; 2)主本船及视景系统1套; 3)副本船及视景系统2套; 提供系统的总体框架(包括应急备用系统),主要硬件设备的型号、性能指标和备品清单。 2、模拟器中的各本船功能完备 可完整地模拟船舶驾驶台操作环境,具有较高的仿真精度,可用于包括在受限水域进行高级操纵和引航训练。 可以进行STCW78/95公约所规定的模拟器培训和适任评估。模拟器的性能指标满足挪威船级社(DNV)有关大型船舶操纵模拟器的性能标准和其他国际公认的模拟器标准,满足国家海事局关于“大型船舶操纵模拟器”、“驾驶台资源管理”、“雷达/ARPA模拟器”培训大纲的训练要求。 模拟器应采用当今先进的技术手段和方法,具有一定的先进性和前瞻性。 二、主本船的技术要求 主本船具有一个与实船驾驶台相似的环境,拥有一套完整的仪器设备面板,设备功能和操作性能可达到实际硬件设备所能完成的功能。主本船具有5个通道,水平视场角应达到180°、垂直视场角不小于25°的大屏幕柱幕投影视景系统,每个视景通道的分辨率至少为1024×768,采用几何校正和边缘融合软件校正技术,做到视景真正无缝拼接和高亮度显示,为操作人员提供最接近真实的景象,并提供望远镜及漫游通道,可用于漫游观测和望远镜观测周围360°范围的视景。 主本船的功能要求如下: 1、电子海图显示系统 电子海图显示系统应符合有关ECDIS性能标准的要求。应具有无级放大和缩小、区域放大、自动漫游、分层显示,白天、黑夜、晨昏和朦胧显示;应具有海图要素拾取、航线设计,
可进行海图编辑、改正。提供可覆盖中国沿海港口、主要水道及世界常用海域(至少应包括马六甲海峡、新加坡水域、英吉利海峡等)海图。 2、以ECDIS为背景的船舶动态显示 在ECDIS上可动态显示本船、目标船及拖轮的船位。其大小随船舶吨位大小变化。本船靠离码头时缆绳的受力情况。 3、船舶运动数学模型 船舶运动数学模型至少10个类型。 每种类型中应包括不同吨位与载况的模型。船舶运动数学模型中包括影响本船运动的各种效应(车、舵、锚、缆、风、流、拖轮、岸壁效应、船间效应、浅水效应等),附有精度说明及测试结果。根据车、舵、锚、缆、拖轮的操作,航行环境信息(风、流、潮汐等),实时解算本船的运动参数(船位、航向、速度、航向变化率、加速度等)。 4、舵控制 具有可进行选择的随动舵、自动舵、应急舵。 命令舵角、实际舵角、船舶转头速率、三面舵角指示器、航向的动态显示。 陀螺分罗经指示器动态变化。 提供自动舵控制、操作单元以及应急舵控制手柄。 5、车钟控制 根据船舶模型本身的推进器套数,可使用单车或双车控制。 主机转速、空气启动压力动态变化。 6、可变螺距调节 对采用可调螺距桨的船模,可进行螺距调节,螺距指示动态显示。 7、船舶艏、艉侧推控制 对有艏、艉侧推的船舶,可进行艏、艉侧推的控制,并实时显示螺距比。 8、本船缆的控制 根据船舶的大小,可同时进行多达20根缆的带缆、解缆、绞缆操作,绞缆速度可调。在电子海图上可选择缆桩或浮筒的位置,可动态显示每根缆的长度和受力动态显示。 9、本船锚的控制 用锚操作面板进行左、右锚的操作(抛锚、绞锚、松放、刹停),并动态显示锚链的长度和张力。 10、本船拖轮的控制
第6章 船舶运动控制系统建模应用 6.1 引 言 数学模型化(mathematical modelling)是用数学语言(微分方程式)描述实际过程动态特性的方法。在船舶运动控制领域,建立船舶运动数学模型大体上有两个目的:一个目的是建立船舶操纵模拟器(ship manoeuvring simulator),为研究闭环系统性能提供一个基本的仿真平台;另一个目的是直接为设计船舶运动控制器服务。船舶运动数学模型主要可分为非线性数学模型和线性数学模型,前者用于船舶操纵模拟器设计和神经网络控制器、模糊控制器等非线性控制器的训练和优化,后者则用于简化的闭环性能仿真研究和线性控制器(PID, LQ, LQG, H ∞鲁棒控制器)的设计。 船舶的实际运动异常复杂,在一般情况下具有6个自由度。在附体坐标系内考察,这种运动包括跟随3个附体坐标轴的移动及围绕3个附体坐标轴的转动,前者以前进速度(surge velocity)u 、横漂速度(sway velocity)v 、起伏速度(heave velocity)w 表述,后者以艏摇角速度(yaw rate)r 、横摇角速度(rolling rate)p 及纵摇角速度(pitching rate)q 表述;在惯性坐标系内考察,船舶运动可以用它的3个空间位置000,,z y x (或3个空间运动速度 000,,z y x &&&)和3个姿态角即方位角(heading angle)ψ、横倾角(rolling angle)?、纵倾角 (pitching angle)θ (或3个角速度θ?ψ&&&,,)来描述,),,(θ?ψ称为欧拉角[4](见图6.1.1)。 显然T ],,[w v u 和T 000],,[z y x &&&以及T ],,[r q p 和T ],,[θ? ψ&&&之间有确定关系[4]。但这并不等于说,我们要把这6个自由度上的运动全部加以考虑。数学模型是实际系统的简化,如何简化就有很大学问。太复杂和精细的模型可能包含难于估计的参数,也不便于分析。过于简单的模型不能描述系统的重要性能。这就需要我们建模时在复杂和简单之间做合理的折中。对于船舶运动控制来说,建立一个复杂程度适宜、精度满足研究要求的数学模型是至关重要的。 图6.1.1的坐标定义如下:000Z Y X O -是惯性坐标系(大地参考坐标系), 为起始 位置,0OX 指向正北,0OY 指向正东,0OZ 指向地心;o -xyz 是附体坐标系,为船首尾之间连线的中点,ox 沿船中线指向船首,oy 指向右舷,oz 指向地心;航向角ψ以正 北为零度,沿顺时针方向取0?~360?;舵角δ以右舵为正。对于大多数船舶运动及其控制问题而言,可以忽略起伏运动、纵摇运动及横摇运动,而只需讨论前进运动、横漂运动和艏摇运动,这样就简化成一种只有3个自由度的平面运动问题。图6.1.2给出图6.1.1经简化后的船舶平面运动变量描述。 船舶平面运动模型对于像航向保持、航迹跟踪、动力定位、自动避碰等问题,具有足够的精度;但在研究像舵阻摇、大舵角操纵等问题时,则必须考虑横摇运动。本章根据刚体动力学基本理论建立船舶平面运动基本方程,据此进一步导出状态空间型(线性和非线性)及传递函数型船舶运动数学模型,并考虑了操舵伺服系统的动态特性和风、浪、流干扰的处理方法。这些结果将作为设计各种船舶运动控制器的基础。计及横摇的四自由度船舶运动数学模型参见文献[5]。
《船舶阻力》思考题与习题 第一章 总论 1)《船舶阻力》学科的研究任务与研究方法。 答:本课程着重介绍船舶航行时所受到的阻力的产生原因,各种阻力的特性,决定阻力的方法,影响阻力的因素以及减少阻力的途径等问题。 2)船舶在水中航行时,流场中会产生那些重要物理现象?它们与阻力有何关系? 3)影响船舶阻力的主要因素有那些? 4)各阻力成分及其占总阻力的比例与航速有何关系? 低速船 摩擦阻力70%~80%,粘压阻力10%以上 兴波阻力很小 高速船 兴波阻力40%~50%,摩擦阻力50% 粘压阻力5% 5)物体在理想流体无界域中运动时有无阻力? 应该注意的是压阻力中包含有粘压阻力和兴波阻力两类不同性质的力。兴波阻力既使在理想流体中仍然存在,而摩擦阻力和粘压阻力两者都是由于水的粘性而产生的,在理想流体中并不存在。 6)何谓二物理系统的动力相似? 7)何谓傅汝德(Froude )相似律? 8)何谓雷诺(Reynolds )相似律? 9) 船模试验中能否实现“全相似”?为什么? 10)何谓“相应速度”(又称“相当速度”)? 相应速度(模型) 11)某海船航速)(0.100m L =,)(0.14m B =,)(0.5m T =,)(0.42003m =?,湿面积 s=5.90(m2),V=17.0(kts),阻力试验中所用船模缩尺比25=α,在相当速度下测得兴波阻力w R =9.8(n),试验水温为12?C ,试求: i )船模的相当速度及排水量;
ii )20?C 海水中实船的兴波阻力w R 。 注:1节(knot)=1.852(公里/小时) 12)设825.1V R f ∝,2V R vp ∝,4V R w ∝,在某一航速下,t f R R %80=,t vp R R %10=,t w R R %10=,试计算当速度增加50%后,f R 、vp R 、w R 各占总阻力的百分比。 第二章 粘性阻力 1)何谓“相当平板”? 相当平板:同速度、同长度、同湿表面 相当平板假定:实船或者船模的摩擦阻力分别等于与其同速度,同长度,同湿面积的光滑平板摩擦阻力。 2)摩擦阻力与流态的关系如何?雷诺数对摩擦阻力的影响如何?书P162 3)船体表面纵、横向曲度对摩擦阻力影响如何? 当船体水流的平均速度较平板大,因此边界层厚度大部分(船前70%)比平板要小,这导致速度梯度和摩擦阻力增加。 但当船尾附近,船体边界层变厚,常伴有分离、旋涡现象,这时水流速度较小,摩擦阻力也随之减小。 4)何谓“水力光滑”? 5)何谓“粗糙度补偿系数”?为何将其称为“换算补贴”或“相关补贴”? 总的摩擦阻力系数可取为光滑平板摩擦阻力系数Cf 在加上一个与雷诺数无关的粗糙度补贴系数△Cf.我们一般取0.4*10-3 6)何谓“普遍粗糙度”?何谓“结构粗糙度”? 普通粗糙度:又称为漆面粗糙度,主要是油漆面的粗糙度和壳板表面的凹凸不平等。 局部粗糙度:又称为结构粗糙度。主要为焊接,铆钉,开孔以及突出物等粗糙度。 7)你了解哪些关于减少摩擦阻力的近代研究,自己有何设想? 1.边界层控制办法 2.采用聚合物溶液降阻剂 3.仿生学观点 4.微小沟槽(微槽薄膜) 5.将船体抬出水面,从而使船体表面与水接触改变为与空气接触 8)试述粘压阻力的成因与特性 从能量观点来看,在尾部形成漩涡,另一部分漩涡则被冲向船的后方,同船尾处又继续不断产生的漩涡,这样船体就要不断地提供能量。这部分能量损耗就是以粘压阻力的形式表现的。 9)为降低粘压阻力,对船型有何要求? 1注意后体形状 (1) (2)控制船尾水流的变化平缓 2船型变化不宜过急,特别注意横剖面曲线A(x)前肩勿过于隆起,后肩勿过于内凹。 3对低速肥大船型,可采用球鼻艏以减少舭涡。 10)试证在边界层未分离情况下,粘压阻力仍存在。(考虑利用边界层方程与Lagrange 积分) 对于流线型物体,甚至某些优良船型可能并不发生界层分离现象,但粘压阻力仍然存在,仅数值大小不同而已。这是因为边界层的形成使尾部流线被排挤外移,因为流速较理想流体情况时必然增大,压力将下降。这样尾部的压力值不会达到理想流体中的最大值,首尾仍旧存在压力差,同样会产生粘压阻力,但是与由于边界层分离而引起的粘压阻力相比要小得多。 11)你所了解的粘性阻力理论计算的研究现状与水平。 第三章 兴波阻力
大作业: 直流双闭环调速MATLAB仿真 运动控制技术课程名称: 名:姓电气学院院:学 自动化业:专 号:学 孟濬指导教师: 2012年6月2日
------------------------------------- -------------学浙大江 李超 一、Matlab仿真截图及模块功能描述 Matlab仿真截图如下,使用Matlab自带的直流电机模型: 模块功能描述: ⑴电机模块(Discrete DC_Machine):模拟直流电机 ⑵负载转矩给定(Load Torque):为直流电机添加负载转矩 ⑶Demux:将向量信号分离出输出信号 ⑷转速给定(Speed Reference):给定转速 ⑸转速PI调节(Speed Controller):转速PI调节器,对输入给定信号与实际信号
的差值进行比例和积分运算,得到的输出值作为电流给定信号。改变比例和积分运算系数可以得到不同的PI控制效果。 ⑹电流采样环节(1/z):对电流进行采样,并保持一个采样周期 ⑺电流滞环调节(Current Controller):规定一个滞环宽度,将电流采样值与给定值进行对比,若:采样值>给定值+0.5*滞环宽度,则输出0; 若:采样值<给定值—0.5*滞环宽度,则输出1; 若:给定值—0.5*滞环宽度<采样值<给定值+0.5*滞环宽度,则输出不变 输出值作为移相电压输入晶闸管斩波器控制晶闸管触发角 :根据输入电压改变晶闸管触发角,从而改变电机端电压。GTO⑻晶闸管斩波.⑼续流二极管D1:在晶闸管关断时为电机续流。 ⑽电压传感器Vd:测量电机端电压 ⑾示波器scope:观察电压、电流、转速波形 系统功能概括如下:直流电源通过带GTO的斩波器对直流电机进行供电,输出量电枢电流ia和转速wm通过电流环和转速环对GTO的通断进行控制,从而达到对整个电机较为精确的控制。 下面对各个部分的功能加以详细说明: (1)直流电机 双击电动机模块,察看其参数:
第七章 对策论 §1 引言 社会及经济的发展带来了人与人之间或团体之间的竞争及矛盾,应用科学的方法来 解决这样的问题开始于 17 世纪的科学家,如 C.,Huygens 和 W.,Leibnitz 等。现代对 策论起源于 1944 年 J.,V on Neumann 和 O.,Morgenstern 的著作《Theory of Games and Economic Behavior 》。 对策论亦称竞赛论或博弈论。是研究具有斗争或竞争性质现象的数学理论和方法。 一般认为,它既是现代数学的一个新分支,也是运筹学中的一个重要学科。对策论发展 的历史并不长,但由于它所研究的现象与人们的政治、经济、军事活动乃至一般的日常 生活等有着密切的联系,并且处理问题的方法又有明显特色。所以日益引起广泛的注意。 在日常生活中,经常看到一些具有相互之间斗争或竞争性质的行为。具有竞争或对 抗性质的行为称为对策行为。在这类行为中。参加斗争或竞争的各方各自具有不同的目 标和利益。为了达到各自的目标和利益,各方必须考虑对手的各种可能的行动方案,并 力图选取对自己最为有利或最为合理的方案。对策论就是研究对策行为中斗争各方是否 存在着最合理的行动方案,以及如何找到这个合理的行动方案的数学理论和方法。 §2 对策问题 对策问题的特征是参与者为利益相互冲突的各方,其结局不取决于其中任意一方的 努力而是各方所采取的策略的综合结果。 先考察一个实际例子。 例 1(囚徒的困境) 警察同时逮捕了两人并分开关押,逮捕的原因是他们持有大 量伪币,警方怀疑他们伪造钱币,但没有找到充分证据,希望他们能自己供认,这两个 人都知道:如果他们双方都不供认,将被以持有大量伪币罪被各判刑 18 个月;如果双 方都供认伪造了钱币,将各被判刑 3 年;如果一方供认另一方不供认,则供认方将被从 宽处理而免刑,但另一方面将被判刑 7 年。将嫌疑犯 A 、 B 被判刑的几种可能情况列 于表 1。 表 1 表 1 中每对数字表示嫌疑犯 A 、B 被判刑的年数。如果两名疑犯均担心对方供认并希 望受到最轻的惩罚,最保险的办法自然是承认制造了伪币。 从这一简单实例中可以看出对策现象中包含有的几个基本要素。 2.1 对策的基本要素 (i )局中人 在一个对策行为(或一局对策)中,有权决定自己行动方案的对策参加者,称为局 中人。通常用 I 表示局中人的集合.如果有 n 个局中人,则 I = {1,2,L , n }。一般要求 一个对策中至少要有两个局中人。在例 1 中,局中人是 A 、B 两名疑犯。 (ii )策略集 一局对策中,可供局中人选择的一个实际可行的完整的行动方案称为一个策略。参 加对策的每一局中人 i , i ∈ I ,都有自己的策略集 S i 。一般,每一局中人的策略集中 至少应包括两个策略。 -154- 嫌疑犯 B 供认 不供认 嫌疑犯 A 供认 不供认 (3,3) (0,7) (7,0) (1.5,1.5)
船舶运动控制概述 随着经济全球化的加剧,现代物流业飞速发展,市场对进出口的需求越发的加大,造成了与之相应的航运自动化的繁荣发展,各种新的控制算法不断地应用于传播控制以提高营运的经济效益。作为大连海事大学自动化专业的学生,我们有必要了解船舶相关的知识,包括船舶运动控制,船舶控制系统,船舶导航等的相关知识。并将储备的知识运用到以后的学习与工作中。 一、欠驱动船舶的控制器设计 首先我们先来聊聊船舶的驱动。由于船舶动力驱动结构具有非完整约束和典型的欠驱动特性,而且航行条件的变化、环境参数的严重干扰和测量的不精确性等又使船舶运动呈现出大惯性、长时滞、非线性等特点,采用传统的船舶控制方法已经不能满足控制要求,必须探索新的船舶控制方法。 欠驱动系统是指由控制输入向量空间的维数小于系统广义坐标向量空间维数的系统,即控制输入数小于系统自由度的系统[1]。欠驱动船舶模型一般都具有非线性运动方程的形式,欠驱动船舶模型一般都具有非线性运动方程的形式,欠驱动船舶模型一般都具有非线性运动方程的形式,约束都是不可积的微分表达式,属于非完整系统。 研究欠驱动船舶的控制器设计也具有非常重要的现实意义。一个欠驱动船舶以较少数目的驱动器来完成航行任务,降低了系统的费用及重量,提高了营运效益,同时也会因控制设备的减少而降低船舶机械故障的发生率,使系统运行更加稳定而易于维护。更为重要的是,欠驱动控制同时对船舶完全驱动系统提供了一种备份控制技术。如果全驱动系统遇故障不能正常运行时,可采用欠驱动船舶控制策略,利用仍在工作的控制器对船舶进行有效控制,增大设备出现故障时系统的可靠性。 正是由于上述原因,对欠驱动船舶的控制研究得到了广泛重视并成为控制领域的研究热点之一[2]。作为一种特殊的非线性控制方法,欠驱动船舶控制技术的发展目前还存在着很多问题,有待于更多的科技工作者致力于深入的研究。为了促进欠驱动船舶控制技术的发展,本文在查阅有关资料的基础上,对欠驱动船舶数学模型、控制方法及其发展做了较为详细的综述,并对该领域存在的问题以及可能的发展方向进行了探讨。 如果把船舶作为一个刚体来研究,则船舶的运动有六个自由度,称之为横摇、纵摇、艏摇、横荡、纵荡和垂荡。考虑常规船舶水平面运动的控制,所关心的主要是船舶在水面上的位置和航向,而且就低重心的普通船舶而言,垂荡、纵摇和横摇对其水平面运动影响甚微,可以忽略。因此水面船舶的六自由度运动就可以简化为沿x方向前进、y方向横移及绕z轴旋转(艏摇)的三自由度运动。由于船舶的推进装置仅装备有螺旋桨推进器和船舵,也就是说系统只有2个控制输入(前向推力和旋转力矩),但需要同时控制船舶在水平面运动的3个自由度,因此对常规船舶平面运动的控制研究可归结为欠驱动控制问题。 上述的船舶的控制问题 ,船的质量和阻尼矩阵都假定为三角阵 ,船舶模型参数和环境干扰的不确定性也被忽略 ,都是在理想的条件下对船舶进行镇定Π跟踪控制。
2.3公式法 知识与技能目标: 1.一元二次方程的求根公式的推导 2.会用求根公式解一元二次方程 过程与方法目标: 1.通过公式推导,加强推理技能训练,进一步发展逻辑思维能力. 2.会用公式法解简单的数字系数的一元二次方程. 情感态度与价值观目标: 1.通过运用公式法解一元二次方程的训练,提高学生的运算能力,养成良好的运算习惯.2.通过公式推导,加强推理技能训练,进一步发展逻辑思维能力。 重点、难点、关键: 1.重点:掌握用公式法解一元二次方程。 2.难点;对公式法中求根公式的推导过程的理解. 3.关键:运用配方法推导出一元二次方程的求根公式。 课型新授课 教学目标 1.能根据具体一元二次方程的特征,灵活选择方程的解法。体会解决问题方法的多样性。 2.会用分解因式(提公因式法、公式法)解某些简单的数字系数的一元二次方程。 教学重点掌握分解因式法解一元二次方程。 教学难点灵活运用分解因式法解一元二次方程。 教学方法讲练结合法 1.能根据具体一元二次方程的特征,灵活选择方程的解法。体会解决问题方法的多样性。 2.会用分解因式(提公因式法、公式法)解某些简单的数字系数的一元二次方程。 掌握分解因式法解一元二次方程。 灵活运用分解因式法解一元二次方程。 讲练结合法 2.5.2 为什么是0.618 教学目标 (一)教学知识点 1.建立方程模型来解决实际问题. 2.总结并运用方程来解决实际问题的一般步骤. (二)能力训练要求
1.经历分析具体问题中的数量关系、建立方程模型并解决问题的过程,认识方程模型 的重要性,并总结运用方程解决实际问题的一般步骤. 2.通过列方程解应用题,进一步提高逻辑思维能力和分析问题、解决问题的能力. (三)情感与价值观要求 通过创设现实情境,使学生真切感受到数学的工具作用和人文价值,体验探索之后成功的喜悦,强化了学生的数学意识,优化了学生的思维品质. 教学重点 用一元二次方程刻画现实问题——市场营销. 教学难点 理解题意,找出相等关系. 教学方法 引导——讨论——发现法
第七章 第一题 clc %数据输入 x=[68 68 87 87 106 106 140 140]; y=[9.7981 13.324 9.0078 13.355 9.7918 14.277 9.6563 12.463]; z=[0.0848 0.0897 0.0762 0.0807 0.0696 0.0753 0.0611 0.0651]; %2插值 cx=99; cy=10.3; cz=griddata(x,y,z,cx,cy,'cubic') %做表面图 %meshz(cx,cy,cz) cz = 0.0724 第二题 x=[129 140 103.5 88 185.5 195 105.5 157.5 107.5 77 81 162 162 117.5];
y=[7.5 141.5 23 147 22.5 137.5 85.5 -6.5 -81 3 56.5 -66.5 84 -33.5]; z=[4 8 6 8 6 8 8 9 9 8 8 9 4 9]; %2插值 cx=75:0.5:200; cy=-50:0.5:150; cz=griddata(x,y,z,cx',cy,'cubic') 4.7984 4.7554 4.7129 4.6711 4.6299 4.5893 4.5494 4.5102 4.4718 4.4341 4.8239 4.7808 4.7383 4.6963 4.6550 4.6142 4.5742 4.5348 4.4962 4.4583 4.8492 4.8061 4.7635 4.7214 4.6800 4.6391 4.5990 4.5594 4.5206 4.4825 4.8744 4.8312 4.7885 4.7464 4.7049 4.6639 4.6236 4.5840 4.5450 4.5067 4.8992 4.8560 4.8133 4.7711 4.7295 4.6885 4.6481 4.6084 4.5693 4.5309 4.9237 4.8805 4.8378 4.7956 4.7539
摘要 船舶运动数学模型是船舶运动仿真与控制问题的核心。目前,船舶运动数学模型建模中主要有两大流派:以Abkowite为代表的整体型结构模型和日本拖曳水池委员会(JTTC)提出的分离型结构模型,简称MMG模型。本文主要是对于船舶的回转运动进行研究,采用的是MMG模型。根据13000T散货船的主要参数,通过计算求出所需的相关量,建立了船舶的线性响应型模型。在此模型的基础上,利用MATLAB中的Simulink模块将此数学模型在该软件中建立一个仿真模型。在Simulink中对建立的仿真模型进行运行得到船舶运动参数。通过Simulink的外部模式将仿真结果变成实时输出数据,利用RS232发送并接受数据,用Visual C++连接数据库和RS232的数据提取,再利用Visual C++与SQL的接口读取数据,并通过OSG进行实现船舶回转运动的可视化虚拟仿真。 关键词:船舶回转运动;数学模型;Simulink;视觉仿真;OSG
Abstract The ship motion mathematical model is the problem’s core about the ship motion simulation and control. Currently, there are two major schools in the ship motion mathematical model’s modeling: the overall structure model represented by Abkowite and the separation of structure model referred to as the MMG model proposed by the Japan Towing Tank Committe e (JTTC). This article mainly research on the rotary movement of the ship, using the MMG model. Based on the 13000T bulk carrier’s main parameters, we obtain the required relevant amount by calculating. Then we establish the linear response model of the ship. On the basis of this model, we transfer this mathematical model into a simulation model with the Simulink module of MATLAB. In Simulink, we get the ship motion parameters through running the simulation model. Through Simulink’s external mode, we converse the simulation results into real-time output data, using a standard serial port RS232 to send and receive data. Then we use Visual C++ to connect the database with RS232 data extraction. Using Visual C++ interface with SQL to read database, and conducted by OSG to enable visualization of the ship turning motion of the virtual simulation. Keywords: ship turning motion;mathematical model;Simulink;visual simulation;OSG
《船舶推进学》复习思考题 第二章螺旋桨的几何特性 1.按照系列图谱资料,至少要确定哪些几何参数就可以确定螺旋桨的形状? 答:螺旋桨的叶数、盘面比、直径。 2.等螺距螺旋桨在不同的半径处的螺旋角是否相等?随着半径的增加,螺距角是增加还是减少? 答:不相等,由tanθ=P/2πr知等螺距螺旋桨的螺距角在r增加时减少。 3.等螺距螺旋桨和变螺距螺旋桨的螺旋面是怎样形成的? 答:母线与轴线成固定角度,并使母线以等角速度绕轴线旋转的同时以等线速度沿轴线向上移动,则母线在空间所绘的曲面即为等螺距螺旋面。 母线与轴线成固定角度,并使母线以等角速度绕轴线旋转的同时以随半径递增线速度沿轴线向上移动,则母线在空间所绘的曲面即为变螺距螺旋面。 4.为什么桨叶一般具有侧斜和纵斜? 答:不对称桨叶的叶梢与参考线间的距离Xs称为侧斜,相应之角度θs为侧斜角。若螺旋桨叶面是斜螺旋面,则参考线与轴线的垂线成某一夹角ε,称为纵斜角。合理选择桨叶的侧斜可明显减缓螺旋桨诱导的船体振动。有纵斜的目的在于增大桨叶与尾框架或船体间的间隙,以减小螺旋桨诱导的船体振动,但纵斜不宜过大(一般ε<15o),否则螺旋桨在操作时因离心力而增加叶根处的弯曲应力,对桨叶强渡不利。 5.桨叶上辐射参考线OU的含义是什么? 答:为了正确表达正视图和侧视图之间的关系,取叶面中间的一根母线作为作图的参考线,称为桨叶参考线或叶面参考线。 第三章螺旋桨基础理论及水动力特性 1.理想推进器作为发生推力的工具来说,其理想效率为什么不可能等于1? 答:推进器必须给水流以向后的诱导速度才能获得推力,ηi A= V A/( V A + 1/2u a)可知,理想推进器的效率总是小于1. 2.试用理想推进器理论说明下列问题: (1)为什么内河船常采用双桨而较少采用单桨? 答:内河由于吃水受限,船桨的直径不能很大,常采用双桨来提高整体推力,公式R=Zp·Ti.,Zp为桨叶数,Ti.为一个桨的推力。 (2)当船舶吃水受限时,为什么常采用隧道型艉? 答:ηiA=2/(1+ 2 A oV ι ρ σT T= 1/2A ,Ao=1/4πD 2,对于船舶吃水受限,由于V A一定,船 舶阻力一定,常采用隧道艉以增加直径,从而提高船舶推进效率。 (3)拖轮拖带时其螺旋桨的效率为什么较自航船的低? 答:对于拖船来说,其拖带时所需要的有效推力,必须克服拖船本身的阻力和拖船拖带时拖钩上的拉力,比 直航时的大,由ηiA=2/(1+ ),2 A oV ι ρ σT T= 1/2A 知,推进效率比直航时低。 (4)在一般船上为什么不采用空气螺旋桨的推进方式? 答:由ηiA=2/(1+ ),2 A oV ι ρ σT T= 1/2A 知,空气密度远小于水的密度,所以推力小的多。 (5)导管螺旋桨为什么可以提高效率? 答:采用导管桨可以限制尾流截面A1的收缩,提高A1就可以提高效率ηiA,公式ηiA
第七章.多元分析实验基本实验 1.线性回归; 解:由题可以得出如下的R程序: > X1<-c, , , , , , , , , , 239) > X2<-c, , , , , , , , , , > X3<-c, , , , , , , , , , > Y<-c, , 19, , , , , ,, , >
> <-lm(Y ~ X1+X2+X3) > summary 运行后可以得知; Call: lm(formula = Y ~ X1 + X2 + X3) Residuals: Min 1Q Median 3Q Max Coefficients: Estimate Std. Error t value Pr(>|t|) (Intercept) *** X1 X2 *** X3 * --- Signif. codes: 0 ‘***’ ‘**’ ‘*’ ‘.’ ‘ ’ 1 Residual standard error: on 7 degrees of freedom Multiple R-squared: , Adjusted R-squared:
F-statistic: on 3 and 7 DF, p-value: 则可以得出Y关于X1、X2、X3的线性回归方程; Y= X2+ 由上述的结果可以得知方程的常量与X2显著性为***表示十分的显著,X3显著性为*表示显著,而X2为不显著。 (2)由(1)中的数据可以得知新的分析函数anovaR程序如下: X1<-c, , , , , , , , , , 239) X2<-c, , , , , , , , , , X3<-c, , , , , , , , , , Y<-c, , 19, , , , , ,, , <-lm(Y ~ X1+X2+X3, data=blood) summary anova 运行后可以得出: Min 1Q Median 3Q Max Coefficients: Estimate Std. Error t value Pr(>|t|) (Intercept) *** X1
汽车外形设计的三维数模重建 摘要本文提出了一个汽车外形三维数字模型重建的方法,该方法从汽车外形的工业设计效果图和汽车外形图片入手,利用图像处理技术,进行图像三维外形恢复,利用外三维CAD平台进行数字化主模型重建。同时对重建过程中的关键技术进行了分析研究,提出了可行性的解决方案,为汽车外形设计的并行化和自动化打下良好的基础。 关键词数模重建图像处理主模型反求技术 一、引言 汽车外形不仅决定着一个车型的市场形象,而且决定着汽车的性能,因此汽车设计大都采用自上而下(TOP-DOWN)的设计策略,首先进行总体设计,设计出汽车外形。传统的汽车外形设计和一般的机械产品一样,第一步是概念设计,由工业设计师按照产品设计要求,在满足产品功能的基础上,力求使产品更符合美学原则,以适应市场潮流。然后按比例制作实物模型,进行设计评价、设计修改的反复过程,最后按定型的设计绘制工程图纸,再进行试制、评价、修改、定型的过程,才能够进行批量生产。新品开发周期长,且不利于协作,难以适应瞬息万变的市场需要。因此必须利用发展迅速的计算机技术和产品造型技术,以数字化模型代替实物模型,在设计阶段先构造出新车型的数字化主模型(PMM),以利于工业设计、工程设计、产品评价等相关阶段并行和协同,并服务于产品整个生命周期。如何快速、高效、准确地构造出汽车外形的主模型,是现代设计方法的关键技术。根据对我国汽车业的调查研究,新车型的开发基本分为两种类型:一是开发新的车型;其二是老车型的改型设计。其中改型设计约占新车型的70%,是在原有车型的基础上进行改造和再开发,原有车型的大量信息可以再利用,原有设计的大量成果可以继承。而对于纯粹的新车型开发而言,仍有大量的车型属于仿制开发。对于完全自主进行的新车型开发,建立其数字化主模型的依据仍然有工业设计师给出的设计效果图。因此,产品主模型的构造实质上是继承和发展已有信息,即根据已有的设计信息进行数模重建,实现设计自动化。 二、重建思想 产品设计是将对产品的功能需求映射为能实现该功能要求且能加工出来的产品几何模型的过程。产品设计过程即是产品模型变换的过程,即从需求模型、功能模型、结构模型、工艺规划模型等交互映射,各种模型的构造还受着各种各样的约束,设计结果还必须以大量的工程知识为背景进行评估,设计思想是一个交互迭代、从抽象到具体、由模糊到精确的变化思想。设计各阶段由于设计目的、对象及所受约束的差异,而产生出各种各样的设计模型,由于设计模型的不同,需要对构造模型的设计人员进行分工,即由工业设计师负责构造概念化模型和功能化模型,工程设计师负责产品详细设计模型,工艺师具体负责产品工艺规划等,在产品各阶段模型构造中,最重要的模型是产品的主特征模型(PMM),它是连接上、下游设计过程的桥梁。现有的汽车外形技术存在两个极端:一是由工业设计师负责,要求工业设计师除负责概念设计外,还必须负责工程设计;另一类是由工程设计人员直接利用现有CAD 平台直接进行概念与工程设计。显然,这对设计人员素质要求很高,一般人难以完成。所以有必要在工业设计师与工程师之间架起一座数字化桥梁,因此我们提出了基于图像技术的三维重建理论,即对于改型设计和自主开发设计,根据工业设计师提供的工业设计效果图;仿制设计根据被仿制车型的图片资料(而不是依据由三坐标测量机或者激光扫描仪测出的坐标云点,因为被仿制实车往往不易获得,即使较易获得,所测云点的合理性也因操作人员的经验而有所不同,而车型图片则较易获得),恢复出汽车外形的三维云点,再重构汽车外形的三维主模型。其基本思路如图示。 三、重建技术 基于图像处理技术进行汽车外型三维重建,其基本技术是把所获得的仿制车型图片或工
第一章船舶操纵基础理论 通过本章的学习,要求学员概念理解正确,定义描述准确,对船舶操纵性能够正确评估,并具有测定船舶操纵性能的知识。 根据船舶操纵理论,操纵性能包括: 1)机动性(旋回性能和变速运动性能) 2)稳定性(航向稳定性) 第一节船舶操纵运动方程为了定量地描述船舶的操纵运动,我们引入船舶操纵运动方程,用数学方法来讨论船舶的运动问题。 一、船舶操纵运动坐标系 1.固定坐标系Ox0y0z0 其原点为O,坐标分别为x0,y0,z0,由于我们仅讨论水面上的船舶运动,因此,该坐标系固定于地球表面。 作用于船舶重心的合外力在x0,y0轴上的投影分别为X0和Y0 对z0轴的合外力矩为N
2. 运动坐标系Gxyz 其原点为点G (船舶重心),坐标分别为x ,y ,z ,该坐标系固定于船上。 这主要是为了研究船舶操纵性的方便而建立的坐标系。 x ,y ,两个坐标方向的运动速度分别为u 和v ,所受的外力分别为X 和Y , 对z 轴的转动角速度为r ,z 轴的外力矩为N 。 二、 运动方程的建立 根据牛顿关于质心运动的动量定理和动量矩定理,船舶在水面的平面运动可由下列方程描述: y 0
??? ??===? Z og o og o I N y m Y x m X 该式一般很难直接解出。为了方便,将其转化为运动坐标系表示,这样可以使问题大为简化。经过转换,得: ?? ? ??=+=-=r I N ur v m Y vr u m X Z )()( 该方程看似复杂,但各函数和变量都与固定坐标系没有关系,因此,可以使问题大为简化。 三、 水动力和水动力矩的求解 对于上述方程中的水动力和水动力矩可表示为: ?? ? ??===),,,,,,(),,,,,,(),,,,,,(δδδr v u r v u f N r v u r v u f Y r v u r v u f X N Y X
数学建模第四版第七章课后答案
第七章 第一题 clc %数据输入 x=[68 68 87 87 106 106 140 140]; y=[9.7981 13.324 9.0078 13.355 9.7918 14.277 9.6563 12.463]; z=[0.0848 0.0897 0.0762 0.0807 0.0696 0.0753 0.0611 0.0651]; %2插值 cx=99; cy=10.3; cz=griddata(x,y,z,cx,cy,'cubic') %做表面图 %meshz(cx,cy,cz) cz = 0.0724 第二题 x=[129 140 103.5 88 185.5 195 105.5 157.5 107.5 77 81 162 162 117.5]; y=[7.5 141.5 23 147 22.5 137.5 85.5 -6.5 -81 3 56.5 -66.5 84 -33.5]; z=[4 8 6 8 6 8 8 9 9 8 8 9 4 9]; %2插值 cx=75:0.5:200;
cy=-50:0.5:150; cz=griddata(x,y,z,cx',cy,'cubic') 4.7984 4.7554 4.7129 4.6711 4.6299 4.5893 4.5494 4.5102 4.4718 4.4341 4.8239 4.7808 4.7383 4.6963 4.6550 4.6142 4.5742 4.5348 4.4962 4.4583 4.8492 4.8061 4.7635 4.7214 4.6800 4.6391 4.5990 4.5594 4.5206 4.4825 4.8744 4.8312 4.7885 4.7464 4.7049 4.6639 4.6236 4.5840 4.5450 4.5067 4.8992 4.8560 4.8133 4.7711 4.7295 4.6885 4.6481 4.6084 4.5693 4.5309 4.9237 4.8805 4.8378 4.7956 4.7539 4.7129 4.6724 4.6326 4.5934 4.5549 4.9478 4.9046 4.8619 4.8197 4.7780 4.7369 4.6964 4.6565 4.6172 4.5786 4.9715 4.9283 4.8856 4.8433 4.8016 4.7605 4.7200 4.6800 4.6407 4.6021 4.9946 4.9514 4.9087 4.8665 4.8248 4.7837 4.7431 4.7031 4.6638 4.6251 5.0172 4.9740 4.9313 4.8891 4.8474 4.8063 4.7657 4.7257 4.6864 4.6476
1.动力定位技术背景 1.1 国外动力定位技术发展 目前,国际上主要的动力定位系统制造商有Kongsberg公司、Converteam公司、Nautronix公司等。 下面分别介绍动力定位系统各个关键组成部分的技术发展现状。 1.动力定位控制系统 1)测量系统 测量系统是指动力定位系统的位置参考系统和传感器。国内外动力定位控制系统生产厂家均根据船舶的作业使命选择国内外各专业厂家的产品。位置参考系统主要采用DGPS,水声位置参考系统主要选择超短基线或长基线声呐,微波位置参考系统可选择Artemis Mk 4,张紧索位置参考系统可选择LTW Mk,激光位置参考系统可选择Fanbeam Mk 4,雷达位置参考系统可选择RADius 500X。罗经、风传感器、运动参考单元等同样选择各专业生产厂家的产品。 2)控制技术 20世纪60年代出现了第一代动力定位产品,该产品采用经典控制理论来设计控制器,通常采用常规的PID控制规律,同时为了避免响应高频运动,采用滤波器剔除偏差信号中的高频成分。 20世纪70年代中叶,Balchen等提出了一种以现代控制理论为基础的控制技术-最优控制和卡尔曼滤波理论相结合的动力定位控制方法,即产生了第二代也是应用比较广泛的动力定位系统。 近年来出现的第三代动力定位系统采用了智能控制理论和方法,使动力定位控制进一步向智能化的方向发展。智能控制方法主要体现在鲁棒控制、模糊控制、非线性模型预测控制等方面。 2001 年5 月份,挪威著名的Kongsberg Simrad 公司首次展出了一项的新产品—绿色动力定位系统(Green DP),将非线性模型预测控制技术成功地引入到动力定位系统中。Green DP 控制器由两部分组成:环境补偿器和模型预测控制器。环境补偿器的设计是为了提供一个缓慢变化的推力指令来补偿一般的环境作用力;模型预测控制器是通过不断求解一个精确的船舶非线性动态数学模型,用以预测船舶的预期行为。模型预测控制算法的计算比一般用于动力定位传统的控制器设计更加复杂且更为耗时,主要有三个步骤:1.从非线性船舶模型预测运动;2.寻找阶跃响应曲线;3.求解最佳推力。控制器结构如图所示[1]: 图1.1Green-DP总体控制图