
Harbin Institute of Technology
机械原理大作业一
课程名称:机械原理
设计题目:连杆机构运动分析院系:机电工程学院
班级:1108101
设计者:张舜晨
学号:1110810117
指导教师:陈明
设计时间:2013年7月
哈尔滨工业大学
一、运动分析题目
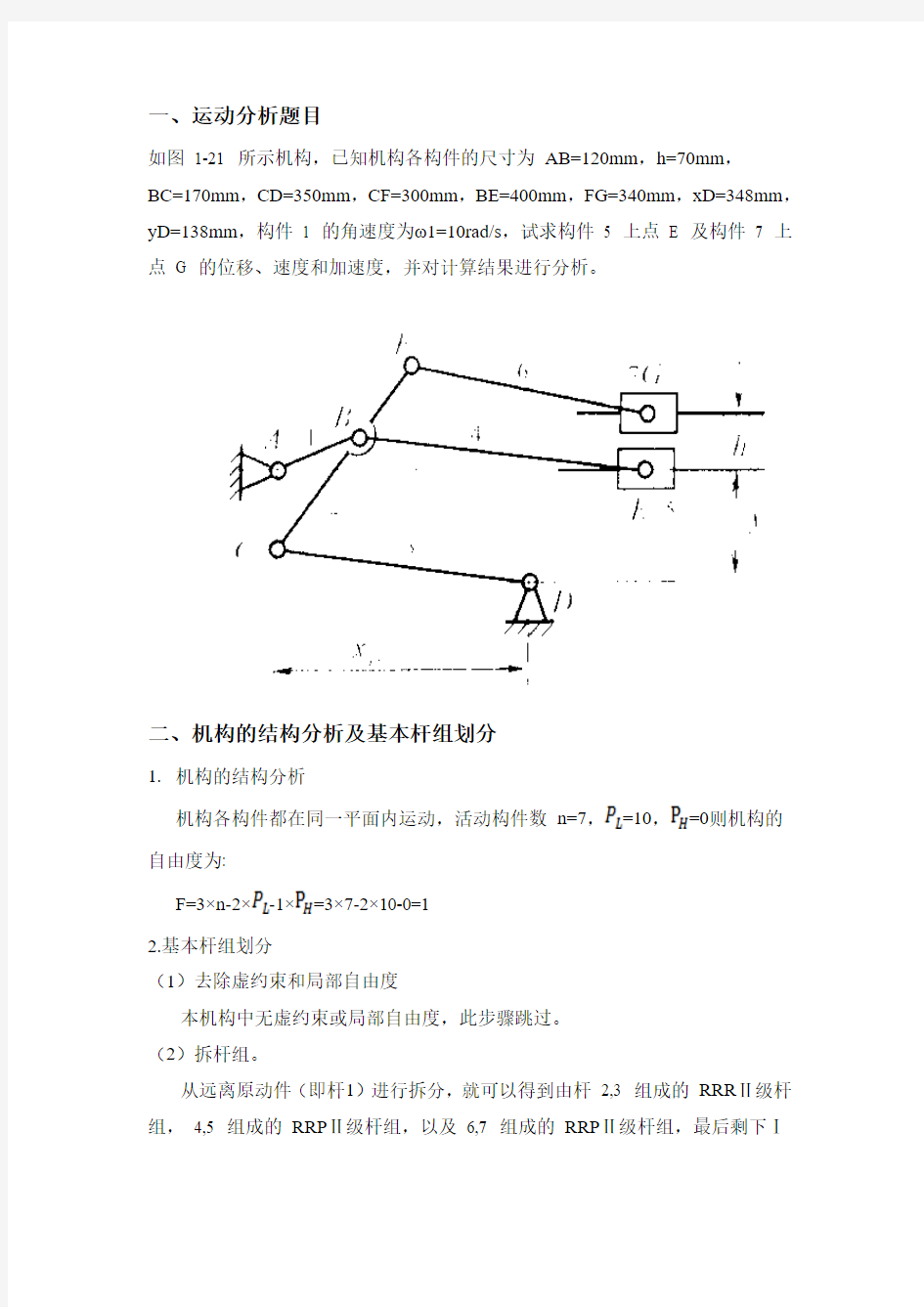
如图1-21 所示机构,已知机构各构件的尺寸为AB=120mm,h=70mm,
BC=170mm,CD=350mm,CF=300mm,BE=400mm,FG=340mm,xD=348mm,yD=138mm,构件1 的角速度为ω1=10rad/s,试求构件5 上点E 及构件7 上点G 的位移、速度和加速度,并对计算结果进行分析。
二、机构的结构分析及基本杆组划分
1.机构的结构分析
机构各构件都在同一平面内运动,活动构件数n=7,=10,=0则机构的
自由度为:
F=3×n-2×-1×=3×7-2×10-0=1
2.基本杆组划分
(1)去除虚约束和局部自由度
本机构中无虚约束或局部自由度,此步骤跳过。
(2)拆杆组。
从远离原动件(即杆1)进行拆分,就可以得到由杆2,3 组成的RRRⅡ级杆组,4,5 组成的RRPⅡ级杆组,以及6,7 组成的RRPⅡ级杆组,最后剩下Ⅰ
级机构杆1。
(3)确定机构的级别
由(2)知,机构为Ⅱ级机构
三、各基本杆组的运动分析数学模型
为了程序的简便,以下分别对所涉及的杆组的一般形式进行分析,以方便建立函数。
①RRR Ⅱ级杆组的运动分析
如下图所示,当已知RRR杆组中两杆长、和两外副B、D的位置和运动时,求内副C的位置及运动以及两杆的角位置、角运动。
1) 位置方程
其中φi:
式中,
为保证机构的正确装配,必须同时满足l BD≤l i+l j和l BD≥|l i-l j|。
表达式中的“+”表示运动副B、C、D为顺时针排列(如图中实线位置);“-”表示B、C、D为逆时针排列(如图中虚线位置)。
以上两组式子联立,求得(xc,yc)后,可求得φj:
2) 速度方程
将式(3-16)对时间求导,可得两杆角速度方程为
式中,
内运动副C的速度方程为
3) 加速度方程
两杆角加速度为
式中,
内副C的加速度为
②RRP Ⅱ级杆组运动分析
RRP Ⅱ级杆组是由两个构件和两个回转副及一个外移动副组成的。如下图所示,已知RRP杆组中的杆长、和外副B的位置,滑块D导路的方向角,位移参考点K的位置及运动等,求内副C的位置以及滑块的位置和运动。
1) 位置方程
消去式(3-23)中的S可得
式中,
为满足装配条件,要求|A0+lj|≤li。
按式(3-23)求得内副C的位移后再求出滑块D的位置S:
滑块D的位置方程为
2) 速度方程
杆的角速度为
滑块D的移动速度为
式(3-26)和式(3-27)中,
内副C的速度为
外移动副D的速度为
3) 加速度方程
li杆的角加速度αi和滑块D沿导路移动的加速度为
式中,
内副C点的加速度为
滑块上D点的加速度为
③同一构件上点的运动分析
1) 位置分析
2) 速度和加速度分析
将上式对时间t求导,可得速度方程:
将上式对时间t求导,可得加速度方程
:
四、建立坐标系
由图1-21 知,点 A 与滑块 5 的轨道在同一直线上,则从计算方便的角度考虑,取直线AE为x 轴,直线AE 过 A 点的垂线为y 轴(正方向朝上),如原图所示。
五、计算编程
对应上一部分列举的三种情况的程序如下:①RRR Ⅱ级杆组运动分析程序X
Y
注:该函数用于在输入RRR Ⅱ级基本杆组的外运动副B、D 位置的t(时间)函数的情况下计算出内运动副 C 的位置、速度、加速度以及两杆的角位置、角速度和角加速度。
定义函数程序如下:
function []=RRR(xB,yB,xD,yD,li,lj,ja)
syms t
%由输入的B、D 亮点位置函数求出速度、加速度函数
xvB=diff(xB,'t');
xvD=diff(xD,'t');
yvB=diff(yB,'t');
yvD=diff(yD,'t');
xaB=diff(xvB,'t');
xaD=diff(xvD,'t');
yaB=diff(yvB,'t');
yaD=diff(yvD,'t');
%中间变量
A0=2*li*(xD-xB);
B0=2*li*(yD-yB);
lBD=sqrt((xD-xB)^2+(yD-yB)^2);
C0=li^2+lBD^2-lj^2;
if ja==1
%B,C,D 三个运动副顺时针排列时
fi=2*atan((B0+sqrt(A0^2+B0^2-C0^2))/(A0+C0));
disp('B,C,D 顺时针排列');
fi
else
%B,C,D 三个运动副逆时针排列时
fi=2*atan((B0-sqrt(A0^2+B0^2-C0^2))/(A0+C0));
disp('B,C,D 逆时针排列');
fi
end
%求内运动副C 的位置
xC=xB+li*cos(fi)
yC=yB+li*sin(fi)
fj=atan((yC-yD)/(xC-xD))
%求解各速度方程
Ci=li*cos(fi);Si=li*sin(fi);
Cj=lj*cos(fj);Sj=lj*sin(fj);
G1=Ci*Sj-Cj*Si;
fiv=[Cj*(xvD-xvB)+Sj*(yvD-yvB)]/G1
fjv=[Ci*(xvD-xvB)+Si*(yvD-yvB)]/G1
xvC=xvB-fiv*li*sin(fi)
yvC=yvB+fiv*li*cos(fi)
%加速度方程
G2=xaD-xaB+fiv^2*Ci-fjv^2*Cj;
G3=yaD-yaB+fiv^2*Si-fjv^2*Sj;
fia=(G2*Cj+G3*Sj)/G1
fja=(G2*Ci+G3*Si)/G1
xaC=xaB-fia*li*sin(fi)-fiv^2*li*cos(fi)
yaC=yaB+fia*li*cos(fi)-fiv^2*li*sin(fi)
%程序结束
②RRP Ⅱ级杆组运动分析程序
注:该函数用于在输入RRP Ⅱ级基本杆组的外运动副 B 位置的t(时间)函数、滑块导路方向角fj 两杆杆长li,lj(本题C 与 D 点重合为0)与计算位移s 时的参考点K 的位置坐标的情况下计算出内运动副 C 点和滑块D 点的位置、速度、加速度等运动参数。
定义函数程序如下
function []=RRP(xB,yB,xK,yK,fj,li,lj)
syms t
xvB=diff(xB,'t');
yvB=diff(yB,'t');
xvK=diff(xK,'t');
yvK=diff(yK,'t');
fjv=diff(fj,'t');
xaB=diff(xvB,'t');
yaB=diff(yvB,'t');
xaK=diff(xvK,'t');
yaK=diff(yvK,'t');
fja=diff(fjv,'t');
%位置方程
A0=(xB-xK)*sin(fj)-(yB-yK)*cos(fj);
fi=asin((A0+lj)/li)+fj;
xC=xB+li*cos(fi);
s=(xC-xK+lj*sin(fj))/cos(fj)
yC=yB+li*sin(fi);
xD=xK+s*cos(fj);
yD=yK+s*sin(fj);
%速度方程
Q1=xvK-xvB-fjv*(s*sin(fj)+lj*cos(fj));
Q2=yvK-yvB+fjv*(s*cos(fj)-lj*sin(fj));
Q3=li*sin(fi)*sin(fj)+li*cos(fi)*cos(fj);
fiv=(-Q1*sin(fj)+Q2*cos(fj))/Q3;
sv=-(Q1*li*cos(fi)+Q2*li*sin(fi))/Q3;
xvC=xvB-fiv*li*sin(fi);
yvC=yvB+fiv*li*cos(fi);
xvD=xvK+sv*cos(fj)-s*fjv*sin(fj);
yvd=yvK+sv*sin(fj)+s*fjv*cos(fj);
%加速度方程
Q4=xaK-xaB+fiv^2*li*cos(fi)-fja*(s*sin(fj)+lj*cos(fj))...
-fjv^2*(s*cos(fj)-lj*sin(fj))-2*sv*fjv*sin(fj);
Q5=yaK-yaB+fiv^2*li*sin(fi)+fja*(s*cos(fj)-lj*sin(fj))...
-fjv^2*(s*sin(fj)+lj*cos(fj))+2*sv*fjv*cos(fj);
fia=(-Q4*sin(fj)+Q5*cos(fj))/Q3;
sa=(-Q4*li*cos(fi)-Q5*li*sin(fi))/Q3;
xaC=xaB-fia*li*sin(fi)-fiv^2*li*cos(fi);
yaC=yaB+fia*li*cos(fi)-fiv^2*li*sin(fi);
xaD=xaK+sa*cos(fj)-s*fja*sin(fj)-s*fjv^2*cos(fj)-2*sv*fjv*sin(fj);
yaD=yaK+sa*sin(fj)+s*fja*cos(fj)-s*fjv^2*sin(fj)+2*sv*fjv*cos(fj);
%程序结束
③一构件上点的运动分析程序
注:本程序用于在输入运动副A 的位置函数、构件的角位置函数及所求点B 到 A 点的距离计算同一构件上的B 点的位置、速度和加速度。
定义函数程序如下:
function []=TG(xA,yA,fi,li)
syms t
xvA=diff(xA,'t');
yvA=diff(yA,'t');
fiv=diff(fi,'t');
xaA=diff(xvA,'t');
yaA=diff(yvA,'t');
fia=diff(fiv,'t');
%位置分析
xB=xA+li*cos(fi);
yB=yA+li*sin(fi);
%速度分析
xvB=xvA-fiv*li*sin(fi);
yvB=yvA+fiv*li*cos(fi);
%加速度分析
xaB=xaA-fiv^2*li*cos(fi)-fia*li*sin(fi);
yaB=yaA-fiv^2*li*sin(fi)+fia*li*cos(fi);
%程序结束
六、计算结果
首先将B 点坐标(120cos(10t),120sin(10t))、D 点坐标(348,-138)与BC 和CD 杆的长度代入RRR Ⅱ级杆组运动分析程序,同时注意到运动副B、C、D 是逆时针排列的,取ja=0,求得BC 杆角位置
=2*atan((-46920-40800*sin(10*t)-((118320-40800*cos(10*t))^2+(-46920-40800*
sin(10*t))^2-(-93600+(348-120*cos(10*t))^2+(-138-120*sin(10*t))^2)^2)^(1/2))/(247
20-40800*cos(10*t)+(348-120*cos(10*t))^2+(-138-120*sin(10*t))^2));
将计算结果连同BF 长度和 B 点坐标代入同一构件上点的运动分析程序,求得 F 点坐标 =120*cos(10*t)+130*cos(2*atan((-46920-40800*sin(10*t)-((118320-40800*cos(1
0*t))^2+(-46920-40800*sin(10*t))^2-(-93600+(348-120*cos(10*t))^2+(-138-120*sin(10
*t))^2)^2)^(1/2))/(24720-40800*cos(10*t)+(348-120*cos(10*t))^2+(-138-120*sin(10*t
))^2)));
=120*sin(10*t)+130*sin(2*atan((-46920-40800*sin(10*t)-((118320-40800*cos(1
0*t))^2+(-46920-40800*sin(10*t))^2-(-93600+(348-120*cos(10*t))^2+(-138-120*sin(10
*t))^2)^2)^(1/2))/(24720-40800*cos(10*t)+(348-120*cos(10*t))^2+(-138-120*sin(10*t
))^2)));
利用F 点坐标并以 A 点为滑块G 的位移参照点,代入RRP Ⅱ级杆组运动分析程序,得
=120*cos(10*t)+130*cos(2*atan((-46920-40800*sin(10*t)-((118320-40800*cos(1
0*t))^2+(-46920-40800*sin(10*t))^2-(-93600+(348-120*cos(10*t))^2+(-138-120*sin(10
*t))^2)^2)^(1/2))/(24720-40800*cos(10*t)+(348-120*cos(10*t))^2+(-138-120*sin(10*t
))^2)))+340*(1-(6/17*sin(10*t)+13/34*sin(2*atan((-46920-40800*sin(10*t)-((118320-
40800*cos(10*t))^2+(-46920-40800*sin(10*t))^2-(-93600+(348-120*cos(10*t))^2+(-138
-120*sin(10*t))^2)^2)^(1/2))/(24720-40800*cos(10*t)+(348-120*cos(10*t))^2+(-138-1
20*sin(10*t))^2))))^2)^(1/2);
相应的滑块速度与加速度的解析解过长且复杂,不再列出。
利用B 点坐标并以 A 点为滑块G 的位移参照点,代入RRP Ⅱ级杆组运动分析程序,得
=120*cos(10*t)+40*(100-9*sin(10*t)^2)^(1/2);
=1/40*(-48000*sin(10*t)*(100-9*sin(10*t)^2)^(1/2)-144000*cos(10*t)*sin(10*
t))/(100-9*sin(10*t)^2)^(1/2);
=1/40*(1/10*(-4800000*cos(10*t)-14400000*cos(10*t)^2/(100-9*sin(10*t)^2)^(
1/2))*(100-9*sin(10*t)^2)^(1/2)+3/10*(4800000*sin(10*t)-43200000*cos(10*t)^2/(100
-9*sin(10*t)^2)*sin(10*t))*sin(10*t))/(100-9*sin(10*t)^2)^(1/2)。
曲柄AB 由x 轴正方向开始逆时针旋转,每旋转15 度取一个数据点,则E、G 两点对应的位移、速度和加速度列表如下:
曲柄转角Φ/(°) 滑块位移s/mm 速度v/(m/s) 加速度a/(m/s2)
E G E G E G
0 520.000 354.7159 0.0000 0.3671 -15.6000 -8.1923 15 514.7035 361.6747 -0.4009 0.1711 -14.7387 -6.6949 30 499.3974 364.0463 -0.7577 0.0169 -12.2758 -5.119 45 475.7492 362.8960 -1.0327 -0.0989 -8.5721 -3.7638 60 446.2642 359.1552 -1.2007 -0.1818 -4.2035 -2.6013 75 413.8959 353.6221 -1.2531 -0.2365 0.1285 -1.605 90 381.5757 346.9779 -1.200 -0.2676 3.7738 -0.8063 105 351.7793 339.7648 -1.0651 -0.2812 6.3402 -0.294 120 326.2642 332.3257 -0.8778 -0.2867 7.7965 -0.2129 135 306.0436 324.7078 -0.6643 -0.2973 8.3985 -0.6906 150 291.5514 316.5974 -0.4423 -0.3257 8.5088 -1.4528 165 282.8813 307.5316 -0.2203 -0.3674 8.4435 -1.5508 180 280.0000 297.4590 0.0000 -0.3985 8.4000 -0.7366 195 282.8813 286.8900 0.2203 -0.4045 8.4435 0.2732 210 291.5514 276.5078 0.4423 -0.3842 8.5088 1.3017 225 306.0436 267.0391 0.6643 -0.3331 8.3985 2.7071 240 326.2642 259.4742 0.8778 -0.2351 7.7965 4.9462 255 351.7793 255.3563 1.0651 -0.0656 6.3402 8.1178 270 381.5757 256.7948 1.200 0.1885 3.7738 11.0585 285 413.8959 265.6460 1.2531 0.4882 0.1285 11.148 300 446.2642 281.8865 1.2007 0.7344 -4.2035 7.042 315 475.7492 302.8210 1.0327 0.8367 -8.5721 0.6421 330 499.3974 324.2275 0.7577 0.7728 -12.2758 -5.2236 345 514.7035 342.2190 0.4009 0.5882 -14.7387 -8.2928 360 520.0000 354.7159 0.0000 0.3671 -15.6000 -8.1923
以下六幅图依次为E点、F点的位移,速度,加速度曲线。
七、计算结果分析
根据计算图表分析比较E与F点的位移,速度,加速度变化,我们发现E 点所在基本杆组与原动件直接相连,其位移随原动件转角按余弦规律变化,速度则为正弦变化规律,加速度变化为三角函数曲线的傅里叶级数形式,波形表现很有规律,而相比之下,点F所在基本杆组中的滑块轨道与E 点对应滑块轨道是平行的,但其所在RRP Ⅱ级杆组从原动件经RRR Ⅱ级杆组DCF 获得动力,传动链延长,不难看出其位移、速度、加速度随原动件转角的变化规律都极为复杂。
由此说明了短传动链具有传递更精准运动且传动效率高的特点。
H a r b i n I n s t i t u t e o f T e c h n o l o g y 机械原理大作业二 课程名称: 机械原理 设计题目: 凸轮机构设计 一.设计题目 设计直动从动件盘形凸轮机构, 1.运动规律(等加速等减速运动) 推程 0450≤≤? 推程 009045≤≤? 2.运动规律(等加速等减速运动) 回程 00200160≤≤? 回程 00240200≤≤? 三.推杆位移、速度、加速度线图及凸轮s d ds -φ 线图 采用VB 编程,其源程序及图像如下: 1.位移: Private Sub Command1_Click() Timer1.Enabled = True '开启计时器 End Sub Private Sub Timer1_Timer() Static i As Single
Dim s As Single, q As Single 'i作为静态变量,控制流程;s代表位移;q代表角度 Picture1.CurrentX = 0 Picture1.CurrentY = 0 i = i + 0.1 If i <= 45 Then q = i s = 240 * (q / 90) ^ 2 Picture1.PSet Step(q, -s), vbRed ElseIf i >= 45 And i <= 90 Then q = i s = 120 - 240 * ((90 - q) ^ 2) / (90 ^ 2) Picture1.PSet Step(q, -s), vbGreen ElseIf i >= 90 And i <= 150 Then q = i s = 120 Picture1.PSet Step(q, -s), vbBlack ElseIf i >= 150 And i <= 190 Then q = i s = 120 - 240 * (q - 150) ^ 2 / 6400 Picture1.PSet Step(q, -s), vbBlue ElseIf i >= 190 And i <= 230 Then
机械原理大作业 This model paper was revised by the Standardization Office on December 10, 2020
机械原理大作业三 课程名称:机械原理 设计题目:齿轮传动设计 院系: 班级: 设计者: 学号: 指导教师: 设计时间: 1、设计题目 机构运动简图 机械传动系统原始参数
2、传动比的分配计算 电动机转速min /745r n =,输出转速m in /1201r n =,min /1702r n =, min /2303r n ,带传动的最大传动比5.2max =p i ,滑移齿轮传动的最大传动比4m ax =v i ,定轴齿轮传动的最大传动比4m ax =d i 。 根据传动系统的原始参数可知,传动系统的总传动比为: 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。设带传动的传动比为5.2max =p i ,滑移齿轮的传动比为321v v v i i i 、、,定轴齿轮传动的传动比为f i ,则总传动比 令 4max 1==v v i i 则可得定轴齿轮传动部分的传动比为 滑移齿轮传动的传动比为 设定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 3、齿轮齿数的确定 根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、7、8、9和10为角度变位齿轮,其齿数: 35,18,39,14,43,111098765======z z z z z z ;它们的齿顶高系数1=* a h ,径向间 隙系数25.0=*c ,分度圆压力角020=α,实际中心距mm a 51'=。
Harbin Institute of Technology 机械原理大作业二 课程名称:机械原理 设计题目:凸轮机构设计 姓名:李清蔚 学号:1140810304 班级:1408103 指导教师:林琳
一.设计题目 设计直动从动件盘形凸轮机构,其原始参数见表 1 表一:凸轮机构原始参数 升程(mm ) 升程 运动 角(o) 升程 运动 规律 升程 许用 压力 角(o) 回程 运动 角(o) 回程 运动 规律 回程 许用 压力 角(o) 远休 止角 (o) 近休 止角 (o) 40 90 等加 等减 速30 50 4-5-6- 7多 项式 60 100 120
二.凸轮推杆运动规律 (1)推程运动规律(等加速等减速运动) 推程F0=90° ①位移方程如下: ②速度方程如下: ③加速度方程如下: (2)回程运动规律(4-5-6-7多项式) 回程,F0=90°,F s=100°,F0’=50°其中回程过程的位移方程,速度方程,加速度方程如下:
三.运动线图及凸轮线图 本题目采用Matlab编程,写出凸轮每一段的运动方程,运用Matlab模拟将凸轮的运动曲线以及凸轮形状表现出来。代码见报告的结尾。 1、程序流程框图 开始 输入凸轮推程回 程的运动方程 输入凸轮基圆偏 距等基本参数 输出ds,dv,da图像 输出压力角、曲率半径图像 输出凸轮的构件形状 结束
2、运动规律ds图像如下: 速度规律dv图像如下: 加速度da规律如下图:
3.凸轮的基圆半径和偏距 以ds/dfψ-s图为基础,可分别作出三条限制线(推程许用压力角的切界限D t d t,回程许用压力角的限制线D t'd t',起始点压力角许用线B0d''),以这三条线可确定最小基圆半径及所对应的偏距e,在其下方选择一合适点,即可满足压力角的限制条件。 得图如下:得最小基圆对应的坐标位置O点坐标大约为(13,-50)经计算取偏距e=13mm,r0=51.67mm.
机械原理大作业 二、题目(平面机构的力分析) 在图示的正弦机构中,已知l AB =100 mm,h1=120 mm,h2 =80 mm,W1 =10 rad/s(常数),滑块2和构件3的重量分别为G2 =40 N和G3 =100 N,质心S2 和S3 的位置如图所示,加于构件3上的生产阻力Fr=400 N,构件1的重力和惯性力略去不计。试用解析法求机构在Φ1=60°、150°、220°位置时各运动副反力和需加于构件1上的平衡力偶M 。 b Array 二、受力分析图
三、算法 (1)运动分析 AB l l =1 滑块2 22112112/,/s m w l a s m w l v c c == 滑块3 21113113/cos ,sin s m l w v m l s ??== 212 113/sin s m w l a ?-= (2)确定惯性力 N w l g G a m F c 2 1122212)/(== N w l g G a m F 121133313sin )/(?-== (3)受力分析 i F F i F F x R D R x R C R 43434343,=-= j F j F F R R R 232323-==
j F i F j F i F F R x R y R x R R 2121121212--=+= j F F F y R x R R 414141+= 取移动副为首解副 ① 取构件3为分离体,并对C 点取矩 由0=∑y F 得 1323F F F r R -= 由0=∑x F 得 C R D R F F 4343= 由 ∑=0C M 得 2112343/cos h l F F R D R ?= ②取构件2为分离体 由0=∑x F 得 11212cos ?R x R F F = 由0 =∑y F 得 1123212sin ?F F F R y R -= ③取构件1为分离体,并对A 点取矩 由0=∑x F 得 x R x R F F 1241= 由0 =∑ y F 得 y R y R F F 1241= 由0=A M 得 1132cos ?l F M R b = 四、根据算法编写Matlab 程序如下: %--------------已知条件---------------------------------- G2=40; G3=100; g=9.8; fai=0; l1=0.1; w1=10; Fr=400; h2=0.8; %--------分布计算,也可将所有变量放在一个矩阵中求解------------------- for i=1:37 a2=l1*(w1^2); a3=-l1*(w1^2)*sin(fai); F12=(G2/g)*a2;
第一章绪论 1—1 试说明机器与机构的特征、区别和联系。 解:机器具有如下三个特征: 1、人造的实物组合体 2、各部分具有确定的相对运动 3、代替或减轻人类劳动,完成有用功或实现能量的转换 机构则具有机器的前两个特征。 机器与机构的区别:研究的重点不同: 机构:实现运动的转换和力的传递; 机器:完成能量的转换或作有益的机械功。 机器与机构的联系:机器由机构组成,一部机器包含不同的机构;不同的机器可能包含相同的机构。 1—2 试举出两个机器实例,并说明其组成、功能。 解:车床:由原动部分(电动机)+传动系统(齿轮箱)+执行部分(刀架、卡盘等),其主要功能为切削,代替人作功。 汽车:由原动部分(发动机)+传动系统(变速箱)+执行部分(车轮等),其主要功能为行走、运输,代替人作功。 第二章平面机构的结构分析 2—1 试画出唧筒机构的运动简图,并计算其自由度。 2—2 试画出缝纫机下针机构的运动简图,并计算其自由度。 2—3 试画出图示机构的运动简图,并计算其自由度。 2—4 试画出简易冲床的运动简图,并计算其自由度。 1 4 2 3 3 2 3 4 3 = ? - ? = - - = = = = h l h l p p n F p p n, , 解: 解: 1 4 2 3 3 2 3 4 3 = ? - ? = - - = = = h l h l p p n F p p n, , 解: 或1 7 2 5 3 2 3 7 5 = ? - ? = - - = = = = h l h l p p n F p p n, ,
2—5 图示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮1输入,使轴A 连续回转,而装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的,试绘出其机构运动简图,分析是否能实现设计意图,并提出修改方案。 解:机构简图如下: 机构不能运动。 可修改为: 2—6 计算图示自动送料剪床机构的自由度,并指出其中是否有复合铰链、局部自由度或虚约束。 2—7 计算图示机构的自由度,并指出其中是否有复合铰链、局部自由度或虚约束。说明该机构具 有确定运动的条件。 J A B C D E F G H I J 解: 1725323143=-?-?=--====h l h l p p n F p p n ,,或 解1:C 为复合铰链,F 、I 为局部自由度。 解1:C 、F 为复合铰链,I 为局部自由度, EFGC 为虚约束。 解2:C 为复合铰链,I 为局部自由度(焊死), EFGC 为虚约束(去掉)。 1 310283233108=-?-?=--====h l h l p p n F p p n ,,1 23122103230 231210=--?-?='+'---=='='===p F p p n F p F p p n h l h l ,,,,2:C 为复合铰链,F 、I 为局部自由度(焊死)。
机械原理大作业三 课程名称: 机械原理 级: 者: 号: 指导教师: 设计时间: 1.2机械传动系统原始参数 设计题目: 系: 齿轮传动设计 1、设计题 目 1.1机构运动简图 - 11 7/7777777^77 3 UtH TH7T 8 'T "r 9 7TTTT 10 12 - 77777" 13 ///// u 2
电动机转速n 745r/min ,输出转速n01 12r/mi n , n02 17r /mi n , n°323r/min,带传动的最大传动比i pmax 2.5 ,滑移齿轮传动的最大传动比 i vmax 4,定轴齿轮传动的最大传动比i d max 4。 根据传动系统的原始参数可知,传动系统的总传动比为: 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实 现。设带传动的传动比为i pmax 2.5,滑移齿轮的传动比为9、心、「3,定轴齿轮传动的传动比为i f,则总传动比 i vi i vmax 则可得定轴齿轮传动部分的传动比为 滑移齿轮传动的传动比为 设定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 3、齿轮齿数的确定 根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、 7、8 9和10为角度变位齿轮,其齿数: Z5 11,Z6 43,Z7 14,Z8 39,Z9 18,乙。35 ;它们的齿顶高系数0 1,径向间隙
系数c 0.25,分度圆压力角200,实际中心距a' 51mm。 根据定轴齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮11、12、13和14为角度变位齿轮,其齿数:Z11 z13 13,乙 2 z14 24。它们的齿顶高系数d 1,径向间隙系数c 0.25,分度圆压力角200,实际中心距 a' 46mm。圆锥齿轮15和16选择为标准齿轮令13,乙 6 24,齿顶高系数 h a 1,径向间隙系数c 0.20,分度圆压力角为200(等于啮合角’)。 4、滑移齿轮变速传动中每对齿轮几何尺寸及重合度的计算 4.1滑移齿轮5和齿轮6
第8章作业 8-l 铰链四杆机构中,转动副成为周转副的条件是什么?在下图所示四杆机构ABCD 中哪些运动副为周转副?当其杆AB 与AD 重合时,该机构在运动上有何特点?并用作图法求出杆3上E 点的连杆曲线。 答:转动副成为周转副的条件是: (1)最短杆与最长杆的长度之和小于或等于其他两杆长度之和; (2)机构中最短杆上的两个转动副均为周转副。图示ABCD 四杆机构中C 、D 为周转副。 当其杆AB 与AD 重合时,杆BE 与CD 也重合因此机构处于死点位置。 8-2曲柄摇杆机构中,当以曲柄为原动件时,机构是否一定存在急回运动,且一定无死点?为什么? 答:机构不一定存在急回运动,但一定无死点,因为: (1)当极位夹角等于零时,就不存在急回运动如图所示, (2)原动件能做连续回转运动,所以一定无死点。 8-3 四杆机构中的极位和死点有何异同? 8-4图a 为偏心轮式容积泵;图b 为由四个四杆机构组成的转动翼板式容积泵。试绘出两种泵的机构运动简图,并说明它们为何种四杆机构,为什么? 解 机构运动简图如右图所示,ABCD 是双曲柄机构。 因为主动圆盘AB 绕固定轴A 作整周转动,而各翼板CD 绕固定轴D 转动,所以A 、D 为周转副,杆AB 、CD 都是曲柄。 8-5试画出图示两种机构的机构运动简图,并说明它们各为何种机构。 图a 曲柄摇杆机构 图b 为导杆机构。 8-6如图所示,设己知四杆机构各构件的长度为240a mm =,600b =mm ,400,500c mm d mm ==。试问: 1)当取杆4为机架时,是否有曲柄存在? 2)若各杆长度不变,能否以选不同杆为机架的办法获得双曲柄机构和双摇杆机构?如何获得?
第二章机构的结构分析- 一、填空与选择题 1、B、A 2、由两构件直接接触而产生的具有某种相对运动 3、低副,高副,2,1 4、后者有作为机架的固定构件 5、自由度的数目等于原动件的数目;运动不确定或机构被破坏 6、√ 7、 8、m-1 9、受力情况10、原动件、机架、若干个基本杆组 11、A、B 12、C 13、C 二、绘制机构简图 1、计算自由度n=7, P L=9,P H=2 F=3n-2P L-P H=3×7-2×9-2=1 2、3、 4、 三、自由度计算 (a)E处为局部自由度;F处(或G处)为虚约束 计算自由度n=4,P L=5,P H=1 F=3n-2P L-P H=3×4-2×5-1=1 自由度的数目等于原动件的数目所以该机构具有确定的运动。 (b)E处(或F处)为虚约束 计算自由度n=5,P L=7,P H=0 F=3n-2P L-P H=3×5-2×7=1 自由度的数目等于原动件的数目所以该机构具有确定的运动。 (c) B处为局部自由度;F处为复合铰链;J处(或K处)为虚约束 计算自由度n=9,P L=12,P H=2 F=3n-2P L-P H=3×9-2×12-2=1 自由度的数目等于原动件的数目所以该机构具有确定的运动。 (d) B处为局部自由度;C处为复合铰链;G处(或I处)为虚约束 计算自由度n=7,P L=9,P H=1 F=3n-2P L-P H=3×7-2×9-1=2 自由度的数目大于原动件的数目所以该机构不具有确定的运动。
(e) 构件CD(或EF)及其两端的转动副引入一个虚约束 计算自由度n=3,P L=4,P H=0 F=3n-2P L-P H=3×3-2×4=1 自由度的数目等于原动件的数目所以该机构具有确定的运动。 (f) C处为复合铰链; 计算自由度n=7,P L=10,P H=0 F=3n-2P L-P H=3×7-2×10=1 自由度的数目等于原动件的数目所以该机构具有确定的运动。 (g) B处为局部自由度;F处为复合铰链;E处(或D处)为虚约束 计算自由度n=6,P L=8,P H=1 F=3n-2P L-P H=3×6-2×8-1=1 (h)去掉杆8此处存在虚约束;B和C处为复合铰链 计算自由度n=7,P L=10,P H=0 F=3n-2P L-P H=3×7-2×10=1 (i) C处为复合铰链 计算自由度n=5,P L =7,P H=0 F=3n-2P L-P H=3×5-2×7=1 自由度的数目等于原动件的数目,所以该机构具有确定的运动。 四、试计算下图所示机构的自由度,并作出它们仅含低副的替代机构。 替代机构如下图所示: (1)计算自由度n=4,P L=5,P H=1 F=3n-2P L-P H=3×4-2×5-1=1 (2)计算自由度n=3,P L=3,P H=2 F=3n-2P L-P H=3×3-2×3-2=1 五、计算下图所示机构的自由度,并通过结构分析确定当构件1、5分别为原动件时机构 的级别。 计算自由度n=5,P L=7,P H=0 F=3n-2P L-P H=3×5-2×7=1 机构分析如下图所示。
连杆的运动的分析 一.连杆运动分析题目 图1-13 连杆机构简图 二.机构的结构分析及基本杆组划分 1.。结构分析与自由度计算 机构各构件都在同一平面内活动,活动构件数n=5, PL=7,分布在A、B、C、E、F。没有高副,则机构的自由度为 F=3n-2PL-PH=3*5-2*7-0=1 2.基本杆组划分 图1-13中1为原动件,先移除,之后按拆杆组法进行拆分,即可得到由杆3和滑块2组成的RPR II级杆组,杆4和滑块5组成的RRP II级杆组。机构分解图如下:
图二 图一 图三 三.各基本杆组的运动分析数学模型 图一为一级杆组, ? c o s l A B x B =, ? sin lAB y B = 图二为RPR II 杆组, C B C B j j B E j B E y y B x x A A B S l C E y x S l C E x x -=-==-+=-+=0000 )/a r c t a n (s i n )(c o s )(?? ? 由此可求得E 点坐标,进而求得F 点坐标。 图三为RRP II 级杆组, B i i E F i E F y H H A l E F A l E F y y l E F x x --==+=+=111)/a r c s i n (s i n c o s ??? 对其求一阶导数为速度,求二阶导数为加速度。
lAB=108; lCE=620; lEF=300; H1=350; H=635; syms t; fai=(255*pi/30)*t; xB=lAB*cos(fai); yB=lAB*sin(fai); xC=0; yC=-350; A0=xB-xC; B0=yB-yC; S=sqrt(A0.^2+B0.^2); zj=atan(B0/A0); xE=xB+(lCE-S)*cos(zj); yE=yB+(lCE-S)*sin(zj); a=0:0.0001:20/255; Xe=subs(xE,t,a); Ye=subs(yE,t,a); A1=H-H1-yB; zi=asin(A1/lEF); xF=xE+lEF*cos(zi); vF=diff(xF,t); aF=diff(xF,t,2); m=0:0.001:120/255; xF=subs(xF,t,m); vF=subs(vF,t,m); aF=subs(aF,t,m); plot(m,xF) title('位移随时间变化图像') xlabel('t(s)'),ylabel(' x') lAB=108; lCE=620; lEF=300; H1=350; H=635; syms t; fai=(255*pi/30)*t; xB=lAB*cos(fai); yB=lAB*sin(fai); xC=0;
设计说明书 1 设计题目 如图所示直动从动件盘形凸轮机构,其原始参数见下表,据此设计该凸轮机构。 2、推杆升程、回程运动方程及位移、速度、加速度线图 2.1凸轮运动理论分析 推程运动方程: 01cos 2h s π?????=-?? ?Φ???? 1 00sin 2h v πωπ??? = ?ΦΦ?? 22 12 00cos 2h a πωπ???= ?ΦΦ?? 回程运动方程: ()0' 1s s h ?-Φ+Φ?? =- ??Φ ? ? 1'0 h v ω=- Φ 0a = 2.2求位移、速度、加速度线图MATLAB 程序 pi= 3.1415926; c=pi/180; h=140; f0=120; fs=45; f01=90; fs1=105; %升程 f=0:1:360; for n=0:f0
s(n+1)=h/2*(1-cos(pi/f0*f(n+1))); v(n+1)=pi*h/(2*f0*c)*sin(pi/f0*f(n+1)); a(n+1)=pi^2*h/(2*f0^2*c^2)*cos(pi/f0*f(n+1)); end %远休程 for n=f0:f0+fs s(n+1)=140; v(n+1)=0; a(n+1)=0; end %回程 for n=f0+fs:f0+fs+f01 s(n+1)=h*(1-(f(n+1)-(f0+fs))/f01); v(n+1)=-h/(f01*c); a(n+1)=0; end %近休程 for n=f0+fs+f01:360; s(n+1)=0; v(n+1)=0; a(n+1)=0; end figure(1);plot(f,s,'k');xlabel('\phi/\circ');ylabel('s/mm');grid on;title('推杆位移线图') figure(2);plot(f,v,'k');xlabel('\phi/\circ');ylabel('v/(mm/s)');grid on;title('推杆速度线图') figure(3);plot(f,a,'k');xlabel('\phi/\circ');ylabel('a/(mm/s2');grid on;title('推杆加速度线图') 2.3位移、速度、加速度线图
机械原理大作业 课程名称:机械原理 设计题目:连杆机构运动分析 院系:机械工程院 班级: xxxx 学号: xxxxx 设计者: xx 设计时间:2016年6月
一、题目 1-12:所示的六连杆机构中,各构件尺寸分别为:lAB =200mm,lBC=500mm,lCD=800mm,xF=400mm,xD=350mm,yD=350mm,w1=100rad/s,求构件5上的F点的位移、速度和加速度。 二、数学模型 1.建立直角坐标系 以F点为直角坐标系的原点建立直角坐标系X-Y,如下图所示。
2.机构结构分析 该机构由I级杆组RR(原动件AB)、II级杆组RRR(杆2、3)、II级杆组PRP (杆5、滑块4)组成。 3.各基本杆组运动分析 1.I级杆组RR(原动件AB) 已知原动件AB的转角
φ=0-2Π 原动件AB的角速度 w=10rad/s 原动件AB的角加速度 α=0 运动副A的位置 xA=-400,yA=0 运动副A的速度 vA=0,vA=0 运动副A的加速度 aA=0,aA=0 可得: xB=xA+lAB*cos(φ) yB=yA+lAB*sin(φ) 速度和加速度分析: vxB=vxA-wl*AB*sin(Φ) vyB=vyA+w*lAB*sin(φ) axB=axA-w2*lAB*cos(φ)-e*lAB*sin(φ) ayB=ayA-w2*lAB*sin(φ)+e*lAB*cos(φ)
2.II级杆组RRR(杆2、3) 杆2的角位置、角速度、角加速度 lBC=500mm,lCD=800mm,xD=350mm,yD=350mm, ψ2=arctan﹛[Bo+﹙Ao2+Bo2-Co2﹚?]/﹙Ao+Bo﹚﹜ ψ3=arctan[﹙yC-yD)/(xC-xD)] Ao=2*LBC(xD-xB) Bo=2*LBC(yD-yB) lBD2=(xD-xB)2+(yD-yB)2 Co=lBC2+lBD2-lCD2 xC=xB+lBC*cos(ψ2) yC=xB+lBC*sin(ψ2) 求导可得C点的角速度和角加速度。
Har bi n I nst i t ute of Technol ogy 械原理大作业二课程名称:机械原理 设计题目:凸轮机构设计 凸轮推杆运动规律 1.运动规律(等加速等减速运动) 推程 0 450 推程 450900 2.运动规律(等加速等减速运动) 回程16002000 回程20002400 ds s 三.推杆位移、速度、加速度线图及凸轮d线图 采用VB编程,其源程序及图像如下: 1.位移: Private Sub Command1_Click() Timer1.Enabled = True ' 开启计时器 End Sub Private Sub Timer1_Timer() Static i As Single
表角度 Picture1.CurrentX = 0 Picture1.CurrentY = 0 1 = i + 0.1 If i <= 45 Then q = i s = 240 * (q / 90) ^ 2 Picture1.PSet Step(q, -s), vbRed ElseIf i >= 45 And i <= 90 Then q = i s = 120 - 240 * ((90 - q) ^ 2) / (90 ^ 2) Picture1.PSet Step(q, -s), vbGreen ElseIf i >= 90 And i <= 150 Then q = i s = 120 Picture1.PSet Step(q, -s), vbBlack ElseIf i >= 150 And i <= 190 Then q = i s = 120 - 240 * (q - 150) ^ 2 / 6400 Picture1.PSet Step(q, -s), vbBlue Dim s As Single, q As Single 'i 作为静态变量,控制流程; s 代表位移; q 代
1、设计题目 1.1机构运动简图 1.2机械传动系统原始参数 2、传动比的分配计算 电动机转速n=970r/min,输出转速n1=41 r/min,n2=37 r/min,n3=33 r/min,带传动的最大传动比i pmax=2.5,滑移齿轮传动的最大传动比i vmax=4,定轴齿轮传动的最大传动比i dmax=4。 根据传动系统的原始参数可知,传动系统的总传动比为 i1=n n1=970/41=23.659i2=n n2 =970/37=26.216i3=n n3 =970/33=29.394 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。设带传动的传动比为i pmax=2.5,滑移齿轮的传动比为i v1、i v2和i v3,定轴齿轮传动的传动比为i f,则总传动比 i1=i pmax i v1i f i2=i pmax i v2i f
i 3=i pmax i v3i f 令i v3=i vmax =4 则可得定轴齿轮传动部分的传动比为i f = i 3 i pmax ×i vmax = 29.3942.5×4 =2.939 滑移齿轮传动的传动比i v1 = i 1 i pmax ×i f = 23.659 2.5×2.939 =3.220 i v2=i 2i pmax ×i f =26.216 2.5×2.939 =3.568 定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 i d = i f 3= 2.9393 =1.432≤i dmax =4 3、齿轮齿数的确定 根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、7、8、9和10为角度变位齿轮,其齿数:z 5=12,z 6=38,z 7=11,z 8=39,z 9=10,z 10=40;它们的齿顶高系数h a ?=1,径向间隙系数c ?=0.25,分度圆压力角α=20°,实际中心距a '=52mm 。 根据定轴齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮11、12、13和14为角度变位 齿轮,其齿数:z 11=z 13=12,z 12=z 14=17。它们的齿顶高系数h a ? =1,径向间隙系数c ?=0.25, 分度圆压力角α=20°,实际中心距a '=45mm 。圆锥齿轮15和16选择为标准齿轮z 15=17,z 16=25, 齿顶高系数h a ?=1,径向间隙系数c ?=0.2,分度圆压力角α=20°(等于啮合角α') 。
第二章机构的结构分析 作业题: 1.图示为一简易冲床的初拟方案。设计思路是:动力由齿轮1输入,轴A连续转动,固联与轴A上的凸轮推动杠杆3使冲头4上下往复运动实现冲压工艺,试绘出其机构运动简图,分析能否实现上述构思,并提出两种修改意见(以机构运动简图表示)。 2.如图所示为一小型压力机。图中齿轮1与偏心轮1ˊ为同一构件,绕固定轴心O连续转动。在齿轮5上开有凸轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕轴C上下摆动;同时又通过偏心轮1ˊ、连杆2、滑槽3使C轴上下移动。最后通过在摆杆4的叉槽中的滑块7和铰链G使冲头8实现冲压运动。试绘制其机构运动简图,计算其自由度。
3.图示是一为高位截肢的人所设计的一种假肢膝关节机构。该机构能保持人行走的稳定性。若以胫骨1为机架,试绘制其机构运动简图和计算其自由度,并作出大腿弯曲 90°时的机构运动简图。 4.试绘出下列各机构的机构示意图,计算其自由度,并说明运动是否确定。
5.计算下列各机构的自由度,若存在复合铰链,局部自由度,虚约束请明确指出。
6.计算图示机构的自由度,并分析基本杆组,确定机构的级别。
第八章平面连杆机构及其设计 作业题: 1.图示四杆机构中各杆件长度已知:a=150mm,b=500mm,c=300mm,d=400mm。试问:1)若取杆件d 为机架是否存在曲柄?如存在,哪一杆件为曲柄?2)若分别取其它杆件为机架,可得到什么类型的机构? 2.图示铰链四杆机构ABCD中,各构件长度如图所示(μl=10mm/mm),AB主动,试求:1)两连架杆AB、CD为何类构件? 2)该机构有无急回性质?若有,其行程速比系数K为多少? 3)在图中作出最小传动角γmin对应的机构位置ABCD; 4)若改为以CD杆为主动,该机构有无死点?若有,请用虚线画出死点位置。
连杆机构的运动分析 一.题目 如图所示是曲柄摇杆机构,各构件长度分别为a,b,c,d,试研究各构件长度的变化对机构急回特性的影响规律。 二.机构分析 四连杆机构可分为如下两个基本杆组 Ⅰ级杆组 RRRⅡ级杆组 AB为曲柄,做周转运动;CD为摇杆,做摆动运动; BC为连杆;AB,CD均为连架杆,AB为主动件。
三.建立数学模型 θ为极位夹角,φ为最大摆角 必须满足条件为:1.a≤b,a≤c,a≤d(a为最短杆); 2.L min+L max≤其他两杆之和。 下面分析杆长和极位夹角的关系: 在△AC2B中, =; 在△AC1B中, =。 θ=- K=
最后分以下四种情况讨论: 1.机架长度d变化 令a=5,b=30,c=29 d由6开始变化至54,步长为1 输出杆长a,b,c,d和K。 2.连杆长度b变化 令a=5,b=29,d=30 b由6开始变化至54,步长为1 输出杆长a,b,c,d和K。 3.摇杆长度c变化 令a=5,b=29,d=30 c由6开始变化至54,步长为1 输出杆长a,b,c,d和K。 4.曲柄长度a变化 令b=29,c=28,d=30 a由5开始变化至27,步长为1 输出杆长a,b,c,d和K。
四.MATLAB计算编程a=5;b=30;c=29; d=6:1:54; m=(d.^2-216)./(50.*d); n=(384+d.^2)./(70.*d); p=acos(m); q=acos(n); w=p-q; o=(w.*180)/3.14; K=(180+o)./(180-o); fprintf('%.6f\n',K); plot(d,K,'b') xlabel('机架长度d变化时 '); ylabel('极位夹角/度'); tilte('极位夹角变化图'); ———————————————————————————————————— ——— a=5;d=30;c=29; b=6:1:54; m=((b-5).^2+59)./(60.*(b- 5)); n=(59+(b+5).^2)./(60.*(b+ 5)); p=acos(m); q=acos(n); w=p-q; o=(w.*180)/3.14; K=(180+o)./(180-o); fprintf('%.6f\n',K); plot(b,K,'b') xlabel('连杆长度b变化时'); ylabel('极位夹角/度'); tilte('极位夹角变化图');
哈工大机械原理大作业——凸轮——2号
————————————————————————————————作者:————————————————————————————————日期:
Harbin Institute of Technology 机械原理大作业 课程名称:机械原理 设计题目:凸轮机构设计
一、设计题目 (1)凸轮机构运动简图: (2)凸轮机构的原始参数 序号升程升程运 动角 升程运 动规律 升程许 用压力 角 回程运 动角 回程运 动规律 回程许 用压力 角 远休止 角 近休 止角 14 90°120°余弦加 速度 35°90°3-4-5 多项式 65°80°70° (1) 推杆升程、回程运动方程如下: A.推杆升程方程: 设为1rad s ω= 升程位移为: ()() 1cos451cos1.5 2 h s π ψψψ ?? ?? =-=- ?? ? Φ ?? ?? 2 3 ψπ ≤≤升程速度为: ()() 1 1 00 sin67.5sin1.5 2 h v πωπ ψψωψ ?? == ? ΦΦ ?? 2 3 ψπ ≤≤升程加速度为: ()() 22 2 1 1 00 cos101.25cos1.5 2 h a πωπ ψψωψ ?? == ? ΦΦ ?? 2 3 ψπ ≤≤ B.推杆回程方程:
回程位移为: ()()345 111110156s h T T T ψ??=--+?? 1029 918 ψπ≤≤ 回程速度为: ()()2211110 3012h v T T T ωψ=- -+'Φ 1029 918ψπ≤≤ 回程加速度为: ()()22 11112 60132h a T T T ωψ=--+'Φ 1029918ψπ≤≤ 其中:() 010 s T ψ-Φ+Φ= 'Φ 1029 918 ψπ≤≤ (2) 利用Matlab 绘制推杆位移、速度、加速度线图 A. 推杆位移线图 clc clear x1=linspace(0,2*pi/3,300); x2=linspace(2*pi/3,10*pi/9,300); x3=linspace(10*pi/9,29*pi/18,300); x4=linspace(29*pi/18,2*pi,300); T1=(x3-10*pi/9)/(pi/2); s1=45*(1-cos(1.5*x1)) s2=90; s3=90*(1-(10*T1.^3-15*T1.^4+6*T1.^5)); s4=0; plot(x1,s1,'r',x2,s2,'r',x3,s3,'r',x4,s4,'r') xlabel('角度ψ/rad'); ylabel('位移s/mm') title('推杆位移线图') grid axis([0,7,-10,100]) 得到推杆位移线图:
机械原理大作业二 课程名称:机械原理 设计题目:凸轮机构设计 院系:机械设计制造及其自动化 班级:1208104 完成者:郑鹏伟 学号:1120810416 指导教师:林琳刘福利 设计时间:2014年6月4日 哈尔滨工业大学
一、 设计题目: 凸轮的机构运动简图如下图所示 : 序 号 升程 (mm ) 升程运动角(°) 升程运 动规律 升程 许用 压力角 (°) 回程运 动角 (°) 回程运动规律 回程许用压力角(°) 远休止角(°) 近休止角(°) 14 90 120 余弦 加速 度 35 90 等减等加速 65 75 75 二、 凸轮推杆升程、回程运动方程及推杆位移,速度加速度线图: (1)凸轮推杆升程运动方程: 根据题意知: 001207590 75s s Φ=Φ='Φ='Φ= (1)从动件升程运动方程(设为1rad s ω=)
1 2 22 12 s [1cos()]2sin()2cos( ) 2h h h a π?πωπ υ?πωπ ?=-Φ= ΦΦ= ΦΦ (2)从动件远休止运动方程 在远休止s Φ段,即213 3 12π?π ≤≤时,90,0,0s h mm a υ====。 (3)从动件回程运动方程 升程段采用等减等加运动规律,运动方程为: ①当回程 0002s s ?'ΦΦ+Φ≤≤Φ+Φ+ 134()123π?π≤≤时: 20s 20 1 02 2 12 2[-+]4[()]4s h s h h h a ?ωυ?ω=- ΦΦ'Φ=- -Φ+Φ'Φ=-'Φ() ②当回程 0002s s ?'Φ'Φ+Φ+ ≤≤Φ+Φ+Φ419()312π?π≤≤时: 2 002 01 0020 2 12 2[)]4[)]4s s h s h h a ?ωυ?ω'= Φ+Φ+Φ-'Φ'=- Φ+Φ+Φ-'Φ='Φ(( (4)从动件近休止运动方程 在近休止s 'Φ段,即19 212π?π ≤≤时,s 0,0,0a υ===。 (2)推杆位移 %t 表示转角 s 表示位移 t=0:0.01:2/3*pi; %升程阶段
机械原理作业五 一、在如图所示的铰链四杆机构中,已知l BC=50mm,l CD=35mm,l AD=30mm,AD为机架。 (1)若此机构为曲柄摇杆机构,且AB为曲柄,求l AB的取值范围; (2)欲使此机构为双曲柄机构,求l AB的取值范围; (3)欲使此机构为双摇杆机构,求l AB的取值范围。 解: (1)依题意,AB为最短杆,有l AB+l BC≤l CD+l AD,则 l AB≤l CD+l AD-l BC=35+30-50=15 mm (2)依题意,AD为最短杆,又分两种情况: 若BC为最长杆,有l AB<l BC=50 mm,且l AD+l BC≤l AB+l CD,则 l AB≥l AD+l BC-l CD=30+50-35=45 mm 若AB为最长杆,有l AB>l BC=50 mm,且l AD+l AB≤l BC+l CD,则 l AB≤l BC+l CD-l AD=50+35-30=55 mm 综上得:45 mm≤l AB≤55 mm (3)当AB取值在上述两种情况之外,则得双摇杆机构。由于 (l AB)mzx≤l BC+l CD+l AD=50+35+30=115 mm 则AB的取值范围是:15 mm<l AB<45 mm 55 mm<l AB<115 mm
二、课本习题5-8 a 。要求:用三种方法求解。 解: (1)画楔块3的受力图,根据移动副的自锁条件得:??α≤- ,则 ?α2≤ (2)根据楔块3的受力图作力三角形,由正弦定理得: ()() ??α-?=-'90sin 2sin 23R F F 生产阻力 ()()2390sin 2sin R F F ??α-?-= ' 令 0≤'F ,则得自锁条件:?α2≤ (3)反行程驱动力 ()()F F R '--?= ?α?2s i n 90sin 23 理想驱动力 ()F F R '= αs i n 1023 反行程机械效率 ()()?α?αηc o s s i n 2s i n 23023-== 'R R F F 令 0≤η ,则得自锁条件:?α2≤ F ? -?90
第二章机构的结构分析 一、填空与选择题 1、B、A 2、由两构件直接接触而产生的具有某种相对运动 3、低副,高副,2,1 4、后者有作为机架的固定构件 5、自由度的数目等于原动件的数目;运动不确定或机构被破坏 6、√ 7、 8、m-1 9、受力情况10、原动件、机架、若干个基本杆组 11、A、B 12、C 13、C 二、绘制机构简图 1、计算自由度n=7, P L=9,P H=2 F=3n-2P L-P H=3×7-2×9-2=1 2、3、 4、 三、自由度计算 (a)E处为局部自由度;F处(或G处)为虚约束 计算自由度n=4,P L=5,P H=1 F=3n-2P L-P H=3×4-2×5-1=1 自由度的数目等于原动件的数目所以该机构具有确定的运动。 (b)E处(或F处)为虚约束 计算自由度n=5,P L=7,P H=0 F=3n-2P L-P H=3×5-2×7=1 自由度的数目等于原动件的数目所以该机构具有确定的运动。 (c) B处为局部自由度;F处为复合铰链;J处(或K处)为虚约束 计算自由度n=9,P L=12,P H=2 F=3n-2P L-P H=3×9-2×12-2=1 自由度的数目等于原动件的数目所以该机构具有确定的运动。 (d) B处为局部自由度;C处为复合铰链;G处(或I处)为虚约束 计算自由度n=7,P L=9,P H=1 F=3n-2P L-P H=3×7-2×9-1=2 自由度的数目大于原动件的数目所以该机构不具有确定的运动。
(e) 构件CD(或EF)及其两端的转动副引入一个虚约束 计算自由度n=3,P L=4,P H=0 F=3n-2P L-P H=3×3-2×4=1 自由度的数目等于原动件的数目所以该机构具有确定的运动。 (f) C处为复合铰链; 计算自由度n=7,P L=10,P H=0 F=3n-2P L-P H=3×7-2×10=1 自由度的数目等于原动件的数目所以该机构具有确定的运动。 (g) B处为局部自由度;F处为复合铰链;E处(或D处)为虚约束 计算自由度n=6,P L=8,P H=1 F=3n-2P L-P H=3×6-2×8-1=1 (h)去掉杆8此处存在虚约束;B和C处为复合铰链 计算自由度n=7,P L=10,P H=0 F=3n-2P L-P H=3×7-2×10=1 (i) C处为复合铰链 计算自由度n=5,P L =7,P H=0 F=3n-2P L-P H=3×5-2×7=1 自由度的数目等于原动件的数目,所以该机构具有确定的运动。 四、试计算下图所示机构的自由度,并作出它们仅含低副的替代机构。 替代机构如下图所示: (1)计算自由度n=4,P L=5,P H=1 F=3n-2P L-P H=3×4-2×5-1=1 (2)计算自由度n=3,P L=3,P H=2 F=3n-2P L-P H=3×3-2×3-2=1 五、计算下图所示机构的自由度,并通过结构分析确定当构件1、5分别为原动件时机构 的级别。 计算自由度n=5,P L=7,P H=0 F=3n-2P L-P H=3×5-2×7=1 机构分析如下图所示。