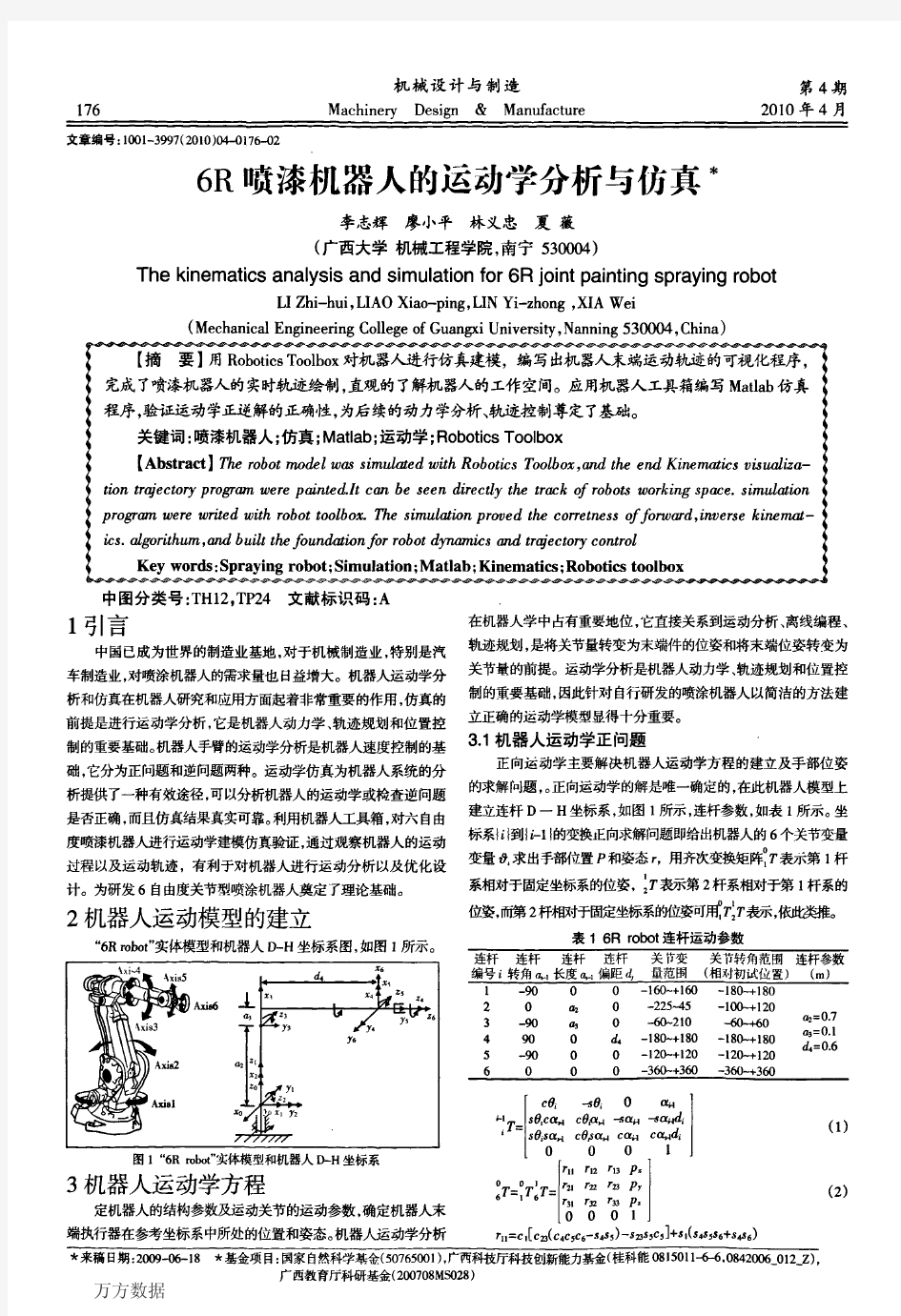
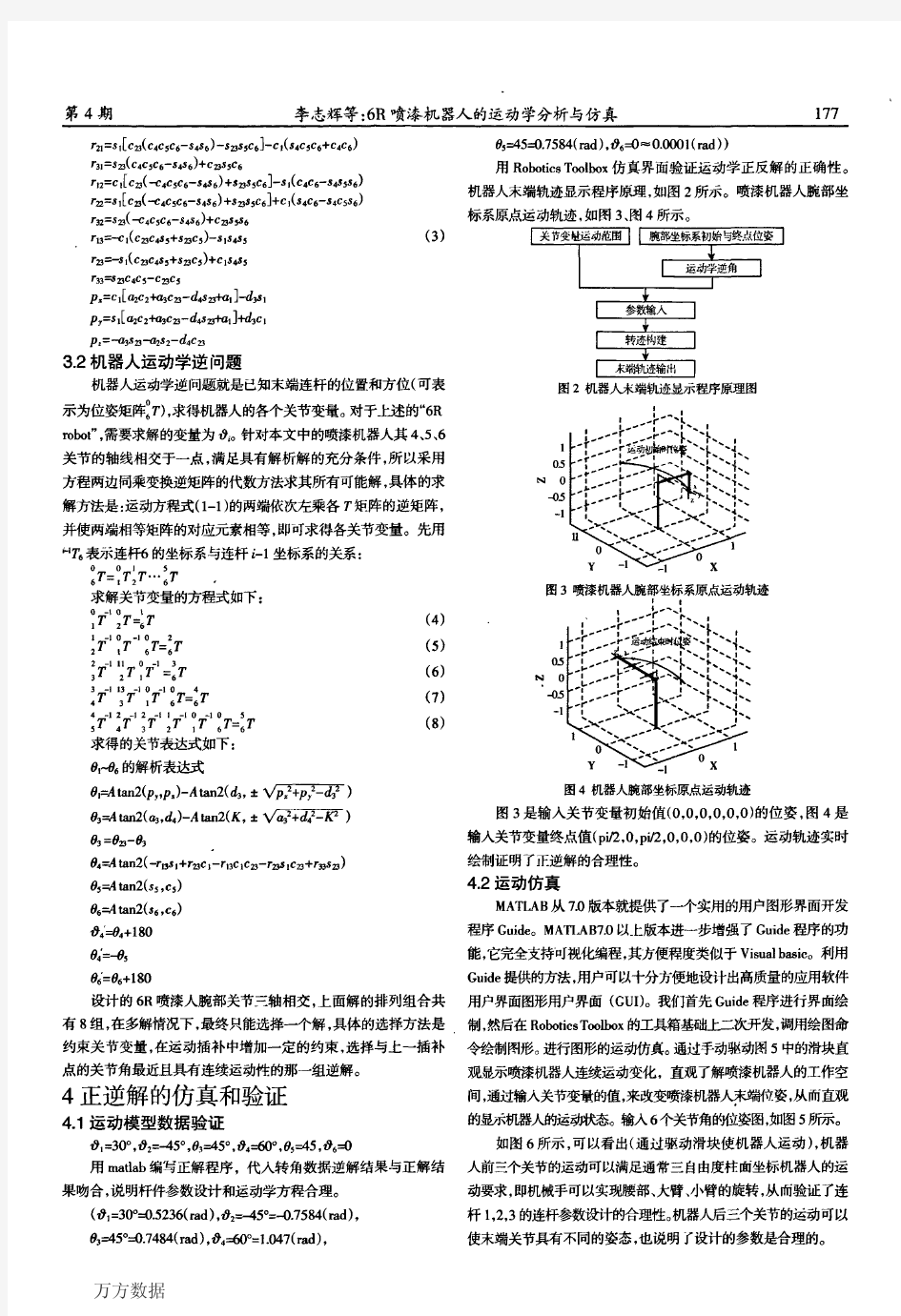
焊接机器人运动分析 摘要:针对puma250焊接机器人,分析了它的正运动学、逆运动学的问题。采用D-H坐标系对机器人puma250 建立6个关节的坐标系并获取D-H 参数,并对其运动建立数学模型用MATLAB编程,同时仿真正运动学、逆运动学求解和轨迹规划利用pro-e对puma250建模三维模型。 关键词:puma250焊接机器人;正逆解;pro-e;Matlab;仿真 一、建立机器手三维图 Puma250机器人,具有6各自由度,即6个关节,其构成示意图如图1。各连杆包括腰部、两个臀部、腕部和手抓。设腰部为1连杆,两个臀部分别为2、3连杆,腰部为4连杆,手抓为5、6连杆,基座不包含在连杆范围之内,但看作0连杆,其中关节2、3、4使机械手工作空间可达空间成为灵活空间。1关节连接1连杆与基座0,2关节连接2连杆与1连杆,3关节连接3连杆与2连按,4关节连接4连杆与3连杆,5关节连接5连杆与4连杆。各连杆坐标系如图 2 所示。
图1 puma250 机器人二、建立连杆直角坐标系。
三、根据坐标系确定D-H表。 四、利用MATLAB 编程求机械手仿真图。>>L1=Link([pi/2 0 0 0 0],'standard'); L2=Link([0 0 0 -pi/2 0],'standard'); L3=Link([0 -4 8 0 0],'standard'); L4=Link([-pi/2 0 8 0 0],'standard'); L5=Link([-pi/2 0 0 -pi/2 0],'standard'); L6=Link([0 2 0 -pi/2 0],'standard'); bot=SerialLink([L1 L2 L3 L4 L5 L6],'name','ROBOT'); ([0 0 0 0 0 0])
第1章运动仿真 本章重点 应力分析的一般步骤 边界条件的创建 查看分析结果 报告的生成和分析 本章典型效果图 1.1机构模块简介 在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。对于提高设计效率降低成本有很大的作用。Pro/ engineer 中“机构”模块是专门用来进行运动仿真和动态分析的模块。 PROE的运动仿真与动态分析功能集成在“机构”模块中,包括Mechanism design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。 使用“机械设计”分析功能相当于进行机械运动仿真,使用“机械设计”分析功能来创建某种机构,定
可以测量诸如位置、速度、加速度等运动特征,可以通过图形直观的显示这些测量量。也可创建轨迹曲线和运动包络,用物理方法描述运动。 使用“机械动态”分析功能可在机构上定义重力,力和力矩,弹簧,阻尼等等特征。可以设置机构的材料,密度等特征,使其更加接近现实中的结构,到达真实的模拟现实的目的。 如果单纯的研究机构的运动,而不涉及质量,重力等参数,只需要使用“机械设计”分析功能即可,即进行运动分析,如果还需要更进一步分析机构受重力,外界输入的力和力矩,阻尼等等的影响,则必须使用“机械设计”来进行静态分析,动态分析等等。 1.2总体界面及使用环境 在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图1-3所示的“机构”下拉菜单,模型树增加了如图1-4所示“机构”一项内容,窗口右边出现如图1-5所示的工具栏图标。下拉菜单的每一个选项与工具栏每一个图标相对应。用户既可以通过菜单选择进行相关操作。也可以直接点击快捷工具栏图标进行操作。 图1-1 由装配环境进入机构环境图
1.1连杆的坐标系 应用D-H 法来建立机器人杆件的坐标系。在这种坐标系中,可以把机械手的任一连杆i (i=1,2,3···,n )看作是一个刚体,与它相邻的两个关节i 、i-1的轴线i 和i-1 之间的关系也由它确定,如图1,可以用以下四个参数描 式中,cθi =cosθi ,sθi =sinθi ,i=1,2,3,···,n 图1连杆坐标系{i}到{i-1}的变换 i αi-1/(rad )a i-1/(cm )d i /(cm 12340 90°090°042.5410014.520011.895.3表1机器人连杆参数表
定义了连杆坐标系和相应得连杆参数,就能建立运动学方程,焊接机器人末端关节的坐标系{n}相对于基础坐标系{0}中的齐次变换公式为: 对于6自由度的焊接机器人公式可以写为 (2 变换矩阵0 n T是关于n个关节变量的函数,这些变量 可以通过放置在关节上的传感器测得,则机器人末端连杆再基坐标系中的位置和姿态就能描述出来。 E n表示焊接机器人末端关节的姿态, 器人在世界坐标系中的位置。[3] 2机器人的逆运动学分析 逆运动学求解是已知机器人末端的位置和姿态即 求解机器人对应于该位置和姿态的关节角 只要0 n T表示的末端连杆坐标系的位置和姿态位于机 械手的可达空间内,则运动学方程至少有一个解, 达空间内,机械手具有任意姿态,导致运动学方程可能出现重解。 机器人的运动学方程是一组非线性方程式, 求解过程中,我们逐次在公式(4)的两端同时左乘一 即为 在上式两边的矩阵中寻找简单的表达式或常数, 对应相等,计算过程如下: ( ( ( ( ( (3求取各关节的解集 依靠D-H法求解关节角的过程是和焊接机器人本身的结构相关的,换句话说,也就是特定配置的机器人需要特定的解决方案。通过公式(6)-(16)可以看出每个关节角的结果是不唯一的,如果采用已有的求解方法,显而易见该过程是缓慢的,复杂的。本文提出了一种计算最终执行器位置的所有精确值的算法。该算法是在MATLAB 程实现的。通过该算法得到各节点的解是更快速、有效的。 用变换矩阵 6T定义一条具有两个端点A和B 轨迹,如公式(17)和(19)。从而θ能够被求出,如公式20)
MECHANICAL ENGINEER 机械工程师 管道机器人运动学分析与变径机构仿真 史继新1a,1b,刘芙蓉1a,1b,胡啸2,袁显宝1a,1b,陈保家1a,1b,李响1a,1b (1.三峡大学 a.湖北省水电机械设备设计与维护重点实验室;b.机械与动力学院,湖北宜昌443002;2.中核武汉核电运行技 术股份有限公司,武汉430223) 摘要:基于对核电站压力容器和主管道接管内部检查的需要,研发了一种多履带可变径式管道检查机器人。分析机器人四种不同的运动情况,得出机器人履带轮角速度和机器人在管道内旋转速度及行走线速度的函数,建立了机器人在管道内的运动学模型。针对机器人可变径机构,建立力学模型,得出变径机构中弹簧的理论数据,并运用Inventor运动仿真分析验证了其合理性。 关键词:管道机器人;运动学模型;变径机构;Inventor运动仿真 中图分类号:TP242.3;TH122文献标志码:粤文章编号:员园园圆原圆猿猿猿(圆园员9)04原园014原园3 Kinematics Analysis and Variable Diameter Mechanism Simulation of Pipeline Robot SHI Jixin1a,1b,LIU Furong1a,1b,HU Xiao2,YUAN Xianbao1a,1b,CHEN Baojia1a,1b,LI Xiang1a,1b (1.China Three Gorges University a.Hubei Key Laboratory of Hydroelectric Machinery Design&Maintenance;b.College of Mechanical and Power Engineering,Yichang443002,China;2.China Nuclear Power Operation Technology Co.,Ltd.,Wuhan430223,China) Abstract院Based on the need for internal inspection of nuclear power plant pressure vessels and main pipelines,a multi-track variable-diameter pipeline inspection robot is developed.The four different motions of the robot are analyzed,and the angular velocity of the robot crawler wheel and the rotation speed of the robot in the pipeline and the traveling linear velocity are obtained.The kinematics model of the robot in the pipeline is established.For the robot variable diameter mechanism,the mechanical model is established,the theoretical data of the spring in the variable diameter mechanism is calculated,and the rationality is verified by Inventor motion simulation analysis. Keywords:pipeline robot;kinematics model;variable diameter mechanism;Inventor motion simulation 0引言 随着核电厂运行时间的增加,各种规格管道内表面可能会出现一些问题需要实施检查与维修。因这些部位处于强辐射区,人员无法直接实施这些工作,必须开发具有行走功能的管道机器人携带摄像头完成核电厂管道检查工作。目前,发达国家对于管道机器人的研究处于领先地位[1]:德国ECA公司研制出一系列管道爬行机器人,在满足多尺寸规格管道的前提下,能搭载多种检测工具,其检查的管道范围从150耀2000mm;日本东京工业大学研制出Thes系列管道机器人[2];韩国汉城汉阳大学研制出双模块协作管道检测机器人[3]。中国在管道检查机器人领域起步较晚,北京德朗检视科技有限公司研发的DNC100、DNC150等管道爬行器,已在核电领域中得到运用;东华大学研制除了自主变位履带足管道机器人[4];上海交通大学针对煤气管道的检测,研制出煤气管道检测机器人样机[5]。 针对目前国内外传统机器人在面对垂直、微小、复杂管时,存在通行性能差、稳定性弱、牵引力不足等缺点。本项目所研制的多履带可变径式管道检查机器人,在机器人的机械结构、移动方式等方面做出改进,能适应150耀160mm管径的管道内部运动,分析了其管道内部运动的运动学模型和变径机构的力学模型,并针对变径机构进行了仿真分析,验证设计的合理性。 1管道检查机器人整体结构设计 为了满足核电厂管道内部检查的需要,机器人必须具备三项基本能力:1)机器人的速度调节能力;2)机器人的转向能力;3) 析, 构设计,如图1 道机器人具有三组履带轮, 很好的夹紧力。 立的电动机控制, 每组履带轮的独立运动, 节不同电动机的转速来使机器人顺利通过弯管。履带轮和主体之间的连杆机构配上弹簧的特性使机器人具有很好的管道适应能力,可以适应150耀160mm管道直径的运动。2运动学分析 机器人每组履带轮的角速度决定机器人整体的运动情况,因此本节根据机器人履带轮角速度和机器人整体运动情况的函数关系建立运动学模型。该模型的坐标系、关节变量和参数如图2所示。XY Z表示全局坐标参考系,并且xyz表示附接到管线检查机器人的中心的局部坐标系;i、j 和k是局部坐标系的单位矢量。无论机器人如何移动,x轴 图1管道机器人 三维模型 1.履带轮组 2.变径机构 3.主体 3 2 1 基金项目:国家自然科学基金(11805112);湖北省教育厅 科学技术研究计划重点项目(D2*******);湖北省水电机械 设备设计与维护重点实验室开放基金项目(2016KJX15、 2017KJX04) 14 圆园员9年第4期网址:https://www.doczj.com/doc/f09594461.html,电邮:hrbengineer@https://www.doczj.com/doc/f09594461.html,
电子科技大学 实验报告 学生姓名: 一、实验室名称:机电一体化实验室 二、实验项目名称:实验三SCARA 学号: 机器人的运动学分析 三、实验原理: 机器人正运动学所研究的内容是:给定机器人各关节的角度,计算机器人末端执行器相对于参考坐标系的位置和姿态问题。 各连杆变换矩阵相乘,可得到机器人末端执行器的位姿方程(正运动学方程) 为: n x o x a x p x 0T40T1 11T2 22T3 d3 n y o y a y p y ( 1-5)3T4 4= o z a z p z n z 0001 式 1-5 表示了 SCARA 手臂变换矩阵0 T4,它描述了末端连杆坐标系{4} 相对基坐标系 {0} 的位姿,是机械手运动分析和综合的基础。 式中: n x c1c2c4s1 s2 c4 c1 s2s4s1 c2 s4,n y s1c2 c4c1 s2 c4s1 s2 s4c1c2 s4 n z0 , o x c1c2 s4s1 s2 s4 c1 s2 c4s1c2c4 o y s1c2 s4c1 s2 s4s1 s2 c4c1c2c4 o z0 , a x0 , a y0 , a z1 p x c1 c2 l2s1s2l 2c1l 1, p y s1c2 l 2 c1 s2 l 2 s1l1, p z d3 机器人逆运动学研究的内容是:已知机器人末端的位置和姿态,求机器人对应于这个位置和姿态的全部关节角,以驱动关节上的电机,从而使手部的位姿符合要求。与机器人正运动学分析不同,逆问题的解是复杂的,而且具有多解性。
1)求关节 1: 1 A arctg 1 A 2 l 12 l 22 p x 2 p y 2 arctg p x 式中:A p x 2 ; p y 2l 1 p y 2 2)求关节 2: 2 r cos( 1 ) arctg ) l 1 r sin( 1 式中 : r p x 2 p y 2 ;arctg p x p y 3). 求 关节变 量 d 3 令左右矩阵中的第三行第四个元素(3.4)相等,可得: d 3 p z 4). 求 关节变 量 θ 4 令左右矩阵中的第二行第一个元素(1.1,2.1 )相等,即: sin 1 n x cos 1n y sin 2 cos 4 cos 2 sin 4 由上式可求得: 4 arctg ( sin 1 n x cos 1 n y )2 cos 1 n x sin 1 n y 四、实验目的: 1. 理解 SCARA 机器人运动学的 D-H 坐标系的建立方法; 2. 掌握 SCARA 机器人的运动学方程的建立; 3. 会运用方程求解运动学的正解和反解; ( 1-8) ( 1-9) ( 1-10 )
本 科 毕 业 论 文(设 计) 题目(中文 学学 完 成 日 期 2017 年 3 月
摘要 当今世界,工业化日趋成熟,机器人被广泛的应用于各行各业,最常用到的有四自由度,六自由度机器人。其中,自动化水平较高的汽车制造业和电子装配业经常常常要使用到六自由度机器人。因此对其实施运动学分析,是进行科学设计的基础,也是降低机器人生产成本,优化机器人运动轨迹的前提。此外,运动分析过程有效的模拟了机器人运动的真实情况,有助于提供有效可行的优化方案。本文主要探讨六自由度机器人的运动分析,基于经典运动学以及动力学的研究方法概念,首先通过solidworks做出机械臂各部分零件的三维图,然后通过SolidWorks装配出六自由度机器人机械臂的三维模型。通过该模型,选取其中一个关节和底座,并用SolidWorks进行运动学分析,对六自由度机器人的运动学和动力学计算方法进行了仿真验证。最后得到六自由度机器人的其中一个自由度的运动仿真实例。通过对该运动仿真实例的分析,得出最佳优化方案,优化机器人的运动轨迹提高机器人的工作效率,降低机器人生产成本。 关键词:六自由度机器人;运动分析;运动学;动力学;
目录 摘要 ...................................................................................................................... I Abstract ............................................................................... 错误!未定义书签。 1 绪论 (1) 1.1课题背景及研究的目的和意义 (1) 1.2机器人国内外发展现状及前景展望--------------------------1 2 六自由度机器人运动学分析 (3) 2.1六自由度机器人的结构-------------------------------------1 2.2运动学分析----------------------------------------------1 3 六自由度机器人动力学分析 (5) 3.1综述----------------------------------------------------3 3.2机器人动力学研究方法------------------------------------3 3.2.1几项假设-------------------------------------------3 3.2.2目标-----------------------------------------------4 3.2.3数学工具-------------------------------------------5 3.3动力学原理----------------------------------------------3 3.3.1动量矩定理---------------------------------------------------------------6 3.3.2能量守恒定理--------------------------------------6 3.3.3牛顿—欧拉方程------------------------------------7 3.3.4达朗贝尔原理--------------------------------------8 3.3.5拉格朗日方程--------------------------------------9 4 六自由度机器人运动分析 (8) 4.1运动分析的软件背景---------------------------------------3 4.2运用solidworks建立六度机器人机械臂三维模型--------------9 4.3运用Solidworks对进行运动学分析-------------------------4 5 结论 (14)
作者简介:王求(1978-),男,在读硕士研究生;研究方向为焊接机器人运动学,材料焊接及其数值模拟。 合肥工业大学材料科学与工程学院 王求 胡小建 李雷阵 摘 要:关键词:针对在狭小空间或密闭容器内以及危险作业环境中焊接的特殊要求,以UG软件为基础设计了一种仿人焊接 机械手。采用D-H方法建立了焊接机械手的运动学方程,并讨论了该机械手的运动学问题。然后运用MATLAB软件对机械手的运动学进行了仿真,通过仿真观察到机械手各个关节的运动,并得到所需的数据,说明了所设计参数的合理性和运动算法的正确性,为焊接机械手的动力学、控制及轨迹规划的研究提供了可靠的依据。焊接机械手;运动学;仿真;Matlab 基于MATLAB的仿人焊接机械手运动学分析和仿真 机器人技术作为信息技术和先进制造技术的典型代表和主要技术手段,已成为世界各发达国家竞相发展的高技术,其发展水平已经成为衡量一个国家技术发展水平的重要标志之一。焊接是制造业中最重要的工艺技术之一,它在机械制造、核工业、航空航天、能源交通、石油化工及建筑和电子等行业中的应用越来越广泛。从21世纪先进制造技术的发展要求来看,焊接自动化生产已是必然趋势,而焊接机器人是焊接自动化的革命性进步 。但是现阶段的焊接机器人都是具 有固定底座的机械手(臂),只能在固定位置完成一定范围内的操作,适应性较低。进行复杂苛刻条件(如小直径的容器内径中焊接)和危险环境(如有辐射等作业环境)中焊接作业时,要求可以代替人类从事焊接作业的机器人,而焊接机械手是实现焊接机器人的关键技术,因此设计出一种小型焊接机械手,可以作为仿人焊接机器人的执行末端,也可以直接作为 [1] [2] 焊接的执行末端,能代替焊工实现在狭小空间或者密闭容器内以及危险作业环境中的焊接。本文根据预定要求对焊接机械手进行机械结构设计,以UG软件进行造型,然后运用D-H坐标系理论为基础建模,讨论了机械手的运动学问题,并运用Matlab中的Ro-boticsToolbox完成了机械手的运动学仿真和轨迹规划。 机械手主要用于点焊或弧焊,其 末端载荷要求不高,能够承受焊枪质量即可,以抓持力1kg为依据进行设计。考虑机械手的工作条件,机械手本体质量小于10kg。机械手本体由基座、肩部、大臂、小臂、手腕、末端执行器所组成,共6个自由度,其中前3个自由度用于控制焊枪端部的空间位置,后3个自由度用于控制焊枪的空间姿态。机械手共6个关节,6个关节全部为转动关节,每个关节实现1个自由度,6个关节实现的运动分别是:1-肩部回转;2-大臂俯仰;3-小臂俯仰;4-小臂回转;5-手腕俯仰;6-手腕 [3] [4] 1焊接机械手结构设计 回转,如图1所示。根据机械手的设计要求,对机械手进行整体设计,使用UG软件进行机械手的三维建模,三维造型如图2所示。 机械手的运动学主要研究机械手 相对于固定参考系的运动,特别是研究机械手末端执行器位置和姿态与关节空间变量的关系。机械手运动学要 2运动学分析 [5]Analysis and simulation of kinesiology of simulated welding mechanical hand based on MATLAB
六轴联动机械臂运动学及动力学求解分析 V0.9版 随着版本的不断更新,旧版本文档中的一些笔误得到了修正,同时文档内容更丰富,仿真程序更完善。 作者朱森光 Email zsgsoft@https://www.doczj.com/doc/f09594461.html, 完成时间 2016-02-28
1引言 笔者研究六轴联动机械臂源于当前的机器人产业热,平时比较关注当前热门产业的发展方向。笔者从事的工作是软件开发,工作内容跟机器人无关,但不妨碍研究机器人运动学及动力学,因为机器人运动学及动力学用到的纯粹是数学和计算机编程知识,学过线性代数和计算机编程技术的人都能研究它。利用业余时间翻阅了机器人运动学相关资料后撰写此文,希望能够起到抛砖引玉的作用引发更多的人发表有关机器人技术的原创性技术文章。本文内容的正确性经过笔者编程仿真验证可以信赖。 2机器建模 既然要研究机器人,那么首先要建立一个机械模型,本文将以典型的六轴联动机器臂为例进行介绍,图2-1为笔者使用3D技术建立的一个简单模型。首先建立一个大地坐标系,一般教科书上都是以大地为XY平面,垂直于大地向上方向为Z轴,本文为了跟教科书上有所区别同时不失一般性,将以水平向右方向为X轴,垂直于大地向上方向为Y轴,背离机器人面向人眼的方向为Z轴,移到电脑屏幕上那就是屏幕水平向右方向为X轴,屏幕竖直向上方向为Y轴,垂直于屏幕向外为Z轴,之所以建立这样不合常规的坐标系是希望能够突破常规的思维定势训练在任意空间建立任意坐标系的能力。 图2-1 图2-1中的机械臂,底部灰色立方体示意机械臂底座,定义为关节1,它能绕图中Y轴旋转;青色长方体示意关节2,它能绕图中的Z1轴旋转;蓝色长方体示意关节3,它能绕图中的Z2轴旋转;绿色长方体示意关节4,它能绕图中的X3轴旋转;深灰色长方体示意关节5,它能绕图中的Z4轴旋转;末端浅灰色机构示意关节6即最终要控制的机械手,机器人代替人的工作就是通过这只手完成的,它能绕图中的X5轴旋转。这儿采用关节这个词可能有点不够精确,先这么意会着理解吧。 3运动学分析 3.1齐次变换矩阵 齐次变换矩阵是机器人技术里最重要的数学分析工具之一,关于齐次变换矩阵的原理很多教科书中已经描述在此不再详述,这里仅针对图2-1的机械臂写出齐次变换矩阵的生成过程。首先定义一些变量符号,关节1绕图中Y轴旋转的角度定义为θ0,当θ0=0时,O1点在OXYZ坐标系内的坐标是(x0,y0,0);关节2绕图中的Z1轴旋转的角度定义为θ1,图中的θ1当前位置值为+90度;定义O1O2两点距离为x1,关节3绕图中的Z2轴旋转的角度定义为θ2,图中的θ2当前位置值为-90度;O2O3两点距离为x2,关节4绕图中的X3轴旋转的角度定义为θ3, 图中的θ3当前位置值为0度;O3O4两点距离为x3,关节5绕图中的Z4轴旋转的角度定义为θ4, 图中的θ4当前位置值为-60度;O4O5两点距离为x4,关节6绕图中的X5轴旋转的角度定义为θ5, 图中的θ5当前位置值为0度。以上定义中角度正负值定义符合右手法则,所有角度定义值均为本关节坐标系相对前一关节坐标系的相对旋转角度值(一些资料上将O4O5两点重合在一起即O4O5两点的距离x4退化为零,本文定义x4大于零使得讨论时更加不失一般性)。符号定义好了,接下来描述齐次变换矩阵。 定义R0为关节1绕Y轴的旋转矩阵 =cosθ0 s0 = sinθ0 //c0 R0 =[c0 0 s0 0 0 1 0 0 0 c0 0 -s0 0 0 0 1] 定义T0为坐标系O1X1Y1Z1相对坐标系OXYZ的平移矩阵 T0=[1 0 0 x0 0 1 0 y0 00 1 0 0 0 0 1] 定义R1为关节2绕Z1轴的旋转矩阵 R1=[c1 –s1 0 0 s1 c1 0 0