中 国 科 学 院 上 海 天 文 台 年 刊
2003年 第24期 ANNAL S OF SHAN GHAI OBSERVA TOR Y ACADEMIA SIN ICA No.24, 2003
CCD联合平差方法及其初步实例检验3
于 涌 李金岭 唐正宏 王广利 赵 铭
(中国科学院上海天文台,上海200030)
提 要
在常规照相天体测量工作中,对暗天体的定位是采用逐级定标星过渡的方法实现的。由于星表系统差和局部差的存在,最终定位结果可能包含难以把握的误差积累。在CCD小视场观测情况
下时常难以找到足够数量的定标星。鉴于此,推导了CCD观测联合平差方法的严格矢量表达式,
以期通过共同星的过渡,实现大天区统一平差。原理上此方法可实现相对于河外天体的定位,以削
弱星表系统差和局部差对定位结果的影响。讨论了CCD联合平差方法实现中的问题,包括底片常
数模型选择、切点位置改正、共同星的较差改正和法方程解算方法等,并分析了具体的处理措施。
用实例初步检验了CCD联合平差方法的效果,表明通过对多张CCD观测的联合平差,可以削弱单
张CCD观测参考星数目过少、单张CCD观测参考星分布不均、个别参考星存在位置偏差和局部区
域参考星存在系统性位置偏差等不利因素对归算结果的影响,进而达到扩大视场和提高归算精度
的目的。
主题词:照相天体测量—底片重叠技术—CCD观测—联合平差
分类号:O212,P123
1 引 言
CCD(Charge Coupled Device)是一种新型的可重复记录的照相系统,它本身良好的物理特性(高量子效率、高线性响应度、强实时处理性)使得它在工作效率和定位精度方面显示出强大的优势。但是CCD也存在视场太小的缺陷,当望远镜焦距相同时,CCD的视场比照相底片小百倍。这就大大限制了CCD在天体测量工作中的应用,主要体现在:(1)小视场观测不能保证视场内有足够数量的参考星,从而使平差方程不可解;(2)即使参考星的数量足够,也不能保证参考星的均匀分布,这使得归算结果存在系统偏差;(3)由于参考星位置和自行存在误差,特别是自行误差的累积使得星表存在局部误差,直接影响最后的测定结果。
为达到扩大视场的目的,很自然地联想到照相天体测量中历史悠久的底片重叠技术。早在1929年,Donner和Furuhjelm已经将底片重叠技术成功运用于AC星表中Helsingfors区的归算[1],结果表明底片常数误差相当于单张底片归算情况的3/4。但由于涉及大量烦琐、重复
2003年1月20日收到.
3国家“973”项目(G1998040703)、国家自然科学基金重点项目(19833030)、中国科学院重大项目(K J951-1 -304)、中国科学院知识创新工程重要方向项目(K J CX2-SW-T1)、上海市科技发展基金项目(J C14012)、国家自然科学基金面上项目(10173019)资助课题.
的计算,在AC 星表其它天区归算中并未采用底片重叠技术。
Eichhorn 于1960年提出重叠底片的整体平差方法[2~4],即根据任何时刻一颗星位置唯一的思想,建立了关于所有底片的底片参数和所有星理想坐标的误差方程,将参考星的理想坐标作为约束,通过整体平差把所有参数同时解出。此方法严重依赖于切点位置精度,尤其在当时参考星表误差较大以及望远镜指向精度欠佳的情况下,无法得到合理结果。而且,此方法要求参考星(约束方程)个数与场星个数相当,否则方程解很难收敛,甚至法方程奇异。Lacroute [1]首先对单张底片分别归算,之后将底片重叠区域恒星的球坐标分别取平均,再运用于单张底片归算。重复以上过程,直至收敛。在Lacroute 方法中,每张底片均应有足够数量的参考星,否则平差过程将无法实现。
后来,其他一些天体测量学家对底片联合平差方法作了修补,特别是德国海德堡天文研究所的天体测量学家在20世纪60~70年代,编制了适用于当时计算机底片联合平差的程序,用于AC 底片的处理[5]。Zacharias 曾尝试采用联合平差方法处理CPC 底片观测资料[6]。近年来,联合平差也曾被尝试用于CCD 的观测处理[7~11],但只是限于一些模拟计算,或者因所用的视场很小而采取简单近似的公式。
20世纪80年代,
冒蔚在云南天文台1m 镜小视场CCD 观测中,为寻求足够数目的定标星,提出了重叠露光测量法[12],采用相邻底片由至少两颗共同星过渡的方法,确定待测天体的位置和自行。此方法将重叠底片投影在同一切平面上,因而仅适用于小天区(如小于1平方度的天区),而且最终定位结果很难排除参考星个别误差的影响。
本文在前人基础上,结合CCD 观测视场较小的特点,用矢量方法推导出严格的适用于大天区观测的联合平差公式。此方法不要求每张底片均存在足够数量的参考星,利用重叠底片的共同星的过渡作用,建立底片常数之间的函数关系。再利用底片覆盖天区内有限数量的参考星,反推出各底片的模型参数。此方法不受视场较小的限制,只要求相邻底片存在足够数量的共同星,就能够实现待测星相对于河外天体的定位,克服星表系统差和局部差对定位结果的影响。本文还拟讨论该方法实现中的若干问题,分析了相应的解决方法。最后利用实测资料对该方法进行了初步检验。
2 CCD 联合平差的原理公式
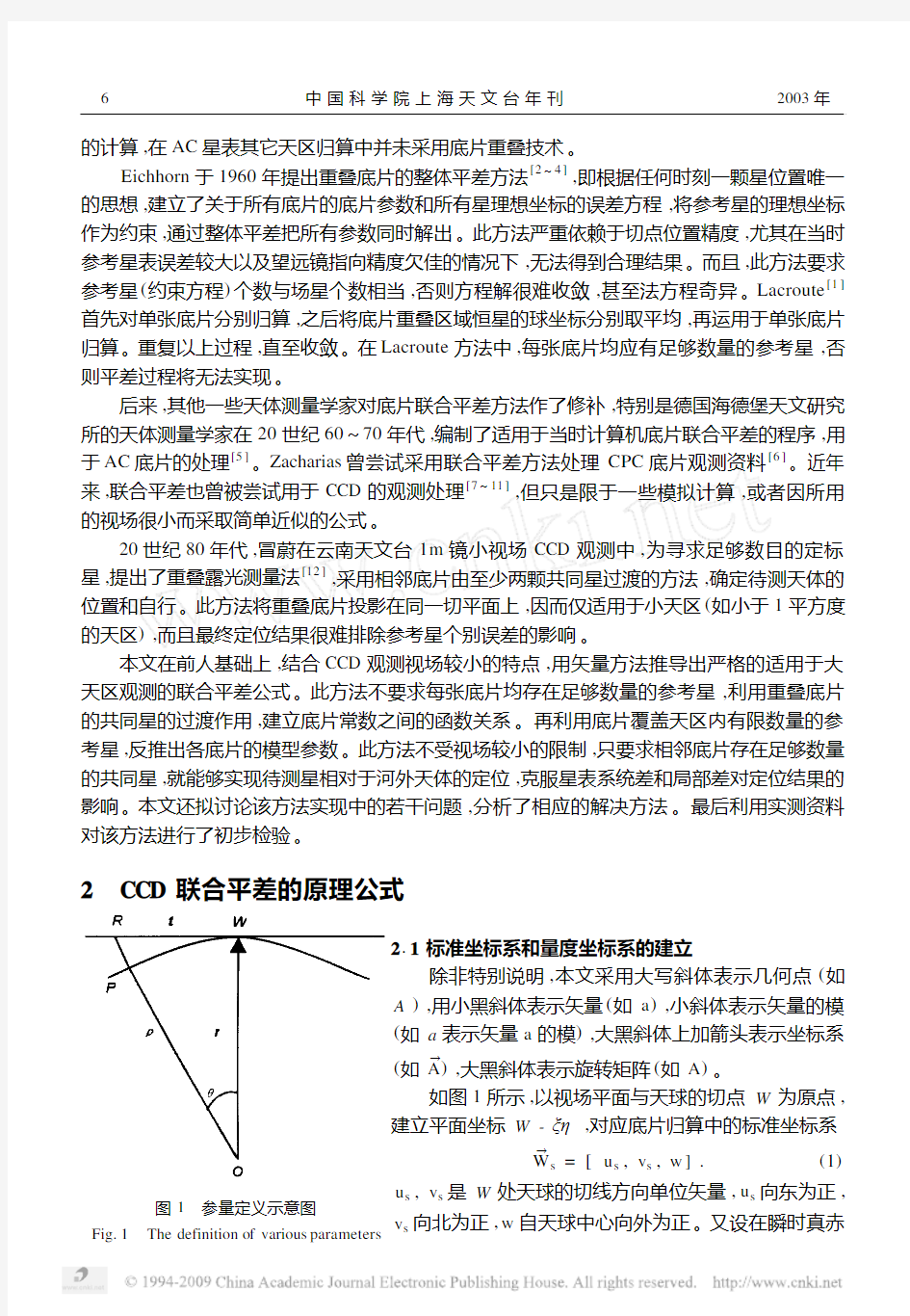
图1 参量定义示意图
Fig.1 The definition of various parameters 2.1标准坐标系和量度坐标系的建立
除非特别说明,本文采用大写斜体表示几何点(如
A ),用小黑斜体表示矢量(如a ),小斜体表示矢量的模
(如a 表示矢量a 的模),大黑斜体上加箭头表示坐标系
(如A →
),大黑斜体表示旋转矩阵(如A )。如图1所示,以视场平面与天球的切点W 为原点,
建立平面坐标W -ξ
η,对应底片归算中的标准坐标系W →s =[u s ,v s ,w ].
(1)u s ,v s 是W 处天球的切线方向单位矢量,u s 向东为正,v s 向北为正,w 自天球中心向外为正。又设在瞬时真赤
6中国科学院上海天文台年刊 2003年
道坐标系(由瞬时真天极和真分点定义)N →中,W 的视坐标为(α0,δ0)(观测方向在瞬时真赤
道坐标系中的坐标),u s ,v s ,w 在N →中的表达式为
u s =N →-cos (90°-α0)
sin (90°-α0)0=-sin α0cos α00,
v s =N →-sin δ0cos α0
-sin δ0sin α0
cos δ0,
w =N →cos δ0cos α0
cos δ0sin α0
sin δ0.
因此W →s =N →-sin α0
-sin δ0cos α0cos δ0cos α0cos α0-sin δ0sin α0
cos δ0sin α00
cos δ0sin δ0.(2)α0,δ0的近似值作为已知,其改正值d α0和d δ0是未知量,在平差时可作为底片常数一道解出。
对于在历元平坐标系中的瞬时平坐标为α,δ(已考虑自行)的天体,其在瞬时真坐标系中的坐标方向ρc 为
ρc =N →N u P e cos δ0cos α0
cos δ0sin α0
sin δ0.(3)
其中N u 和P e 分别是章动和岁差的旋转矩阵。设与ρc 相应的观测方向为ρ,则
ρ=ρc +Δρ,
Δρ=Δρ1+Δρ2+Δ
ρ3+Δρ4+Δρ5.(4)
其中,Δρ1,Δρ2,Δρ3,Δρ4和Δρ5分别为天体方向的视差改正、光行差改正、光线引力弯曲改正、大气折射改正和其它改正。
在视场切平面上,R 的坐标位置矢量t 为(见图1)
t =O R -r =ρ(1/cos θ)-r =ρ/(r ?
ρ)-r .(5)其中O R 2=1+t 2=1+ξ2+η2,
ξ=u s ?t =u s ?(ρ/(r ?ρ)-r )=u s ?ρ/(r ?ρ),η=v s ?t =v s ?(ρ/(r ?ρ)-r )=v s ?ρ/(r ?ρ).
(6)上式中,u s ,v s 位于切平面,因而u s ?r =0,v s ?r =0。
ξ,η为该天体在标准坐标系中的坐标,即标准坐标。
另外,以底片坐标量度中心O 为原点,建立平面坐标O -xy ,对应底片归算中的量度坐标系。天体的量度坐标x ,y 和标准坐标ξ,η之间的关系,就是通常的(O -C )的关系。为
7第24期 CCD 联合平差方法及其初步实例检验
使误差方程线性化,要使计算的W -ξ
η与测量的O -xy 尽可能接近,并把两者差异中的一切能用理论计算的部分包含到ξ,η的计算公式中,而把不能用理论计算但有一定系统性规律的部分用若干待定参数的线性函数加以拟合。至于既不能计算又无法拟合的部分,则视作为偶然误差,在平差中处理。
2.2关于参考星误差方程的建立
星像的标准坐标(ξ,η
)和量度坐标(x ,y )之间的关系可以原理性地表示成:ξ=H (x ,y ,a 1,…,a n ),
η=I (x ,y ,a 1,…,a n ).(7)
就是说,在考虑了各种可能的理论改正后,标准坐标和量度坐标的差异可以用包含若干待定常数的底片模式H ,I 表示出来。H ,I 的具体表达式应考虑望远镜视场大小、成像质量、归算的要求等因素,作不同选择。通常要考虑量度坐标的尺度因子、方向角、零点差、切点坐标采用值改正、视场内的系统性畸变等因素。
对于参考星,通过(3)、
(4)式可得到观测历元的观测位置,再由(6)式得到标准坐标ξ,η,然后利用(7)式建立误差方程。它们是底片常数的线性方程,其中x ,y 通过天文图像处理软件(如IRAF )获得。
2.3关于重叠区域内共同星误差方程的建立
对相邻两次观测的某颗共同星,由(6)式,可以给出标准坐标表达式:
ξ1=u s1?t 1=u s1?ρ1/(r 1?ρ1),
η1=v s1?t 1=v s1?ρ1/(r 1?ρ1),
ξ2=u s2?t 2=u s2?
ρ2/(r 2?ρ2),η2=v s2?t 2=v s2?ρ2/(r 2?ρ2).
该星在两个观测历元的瞬时真坐标方向分别为ρc1和ρc2,观测方向分别为ρ1,ρ2,它们有如下关系:
ρ1=ρc1+(
Δρ)1,ρ2=ρc2+(
Δρ)2,ρ2=ρ1+D ρ.
(8)这里,D ρ是该星在两次观测中自行、岁差、章动的较差量以及两次观测时刻观测方向对坐标方向改正的较差之和。
在切面坐标系中,
ρ1=(1+t 21)-1/2W →s1ξ1
η11
,(9)
ρ2=(1+t 22)-1/2W →s2ξ2
η21
.(10)
由(8)、
(9)、(10)式得:8中国科学院上海天文台年刊 2003年
(1+ξ22+η22)-1/2ξ2
η21
=W →s2?W
→s1(1+ξ21+η21)-1/2ξ1η11+W →s2?(D ρ).(11)
考虑到W →s2?
(D ρ)项为已知,且(1+ξ2+η2)-1/2=1-(ξ2+η2)/2+3(ξ2+η2)2/8+…,
即使视场尺度大到2°,ξ,η最大到1°,上式中4次及以上项小于10-7,可忽略。有
(1+ξ2+η2)-1/2=1-(ξ2+η2)/2.
(12)设该天体坐标的初值为(ξ0,η0),有
1-(ξ0+Δξ)2+(η0+Δη)22=1-ξ20+η20+2ξ0Δξ+2η0Δη+Δξ2+Δη22
.Δξ,Δη表示对初值的改正。即使Δξ,Δη达到1′量级,上式含Δ
ξ和Δη的项将小于10-5。若忽略Δξ,Δη项,在方程(12)中用1-(ξ20+η20)/2代替(1+ξ21+η21)
-1/2,并在给出ξ,η的一次解以后再迭代一次,所得结果将有足够精度。如此得线性方程:
(1+ξ220+η220)-1/2ξ2η21=(1+ξ210+η210)-1/2W →s2?W →s1ξ1
η11
+W →s2?(D ρ).(13)
令K =(1+ξ20+η20)-1/2,(14)
方程(13)成为
K 2ξ2
η21=W →s2?W →s1K 1ξ1η11
+W →s2?(D ρ
).(15)将(7)式代入(15)式,得到K 2H (x ,y ,a 1,…,a n )2I (x ,y ,a 1,…,a n )21=W →s2?W →s1K 1H (x ,y ,a 1,…,a n )1
I (x ,y ,a 1,…,a n )11
+W →s2?(D ρ
).(16)此即为共同星提供的误差方程,它们是底片常数的线性方程。其中W →s1,W →s2由(2)式定义,
K 1,K 2由共同星的近似坐标用(14)式计算给出,较差改正D ρ由(8)式定义。
2.4整个系统的最终解
联立上述参考星、共同星提供的误差方程(7)式和(16)式,通过整体平差解出所有CCD 的模型参数,得到待测星的归算位置。理论上,此方法不受天区范围的限制,能够实现待测星相对于河外天体的定位,进而克服星表系统差和局部差对定位结果的影响。可以预见,通过CCD 观测的联合平差,将能够在射电与光学参考架的连接、标准天区的扩充、特殊天体的定位等方面发挥地面光学望远镜的应用潜力。
3 CCD 联合平差方法的有关问题
从(7)、
(16)式可知,实现CCD 联合平差必须解决一些问题,如联合平差中常数模型的选9
第24期 CCD 联合平差方法及其初步实例检验
取、切点位置的改正、共同星较差处理和法方程解算方法等。
3.1底片常数模型的选择
底片常数模型描述了星像量度坐标和理想坐标的关系,其中非线性底片常数模型考虑了多种改正,包括坐标轴的不垂直与旋转效应、切点位置、大气折射和光行差较差与像场畸变等,以14常数模型为例,其形式如下,
ξ=ax +by +c +dx 2+exy +f y 2+gx (x 2+y 2),η=a ′x +b ′y +c ′+d ′x 2+e ′xy +f ′y 2+g ′x (x 2+y 2).
(17)像场畸变的影响为三级小量[13],在小视场CCD 观测情况下可以忽略不计。如果预先将参考星经过自行、岁差、章动、光行差、视差和大气折射等改正,以转换为观测历元的观测位置,并对每张CCD 做切点位置改正,那么(17)式中的二次项也可不予考虑。这样在联合平差中,(17)式可用线性6常数模型来代替,即
ξ=ax +by +c ,η=a ′x +b ′y +c ′.
(18)另外,联合平差方法是通过重叠区域(如占CCD 视场的1/4大小)内的共同星建立CCD 间的联系,这就要求CCD 局部区域参数特征应该很好地代表整张底片,即要求局部参数能够合理外推。不难想见,线性常数模型将比非线性模型更具优势。对此,可进行如下实例检验。
资料取自2002年6月1日北京天文台兴隆观测基地施密特望远镜对第M 个标准天区的CCD 观测,视场为1°×1°,阵列大小为2048×2048,底片比例尺为每个像素0.024mm ,露光时间为120s 。选取在视场内分布较均匀的参考星,并转换为观测历元的观测位置,采用6常数模型和12常数模型(即忽略(17)式中的三次项)分别归算,图2显示了参考星的分布以及验证星归算位置同标准天区星表位置之差的比较情况,其中“☆”表示参考星位置,
实线箭头和虚
图2 参考星较均匀分布时6常数和12常数模型下归算结果的比较
Fig.2 A comparison of the reduction results between the 6and 12constantsplate models with a
relatively uniform distribution of reference stars
01中国科学院上海天文台年刊 2003年
线箭头分别对应于6常数和12常数模型的归算情况。表1列出了验证星归算位置同星表位置之差的均值与均方差。综合图2与表1可见,在参考星较均匀分布情况下,两种模型的归算结果非常接近,换言之,6常数模型完全可以替代12常数模型。
对于参考星仅分布在局部区域内的情况,6常数模型和12常数模型归算结果的比较示于图3和表1,从中可见,6常数模型归算结果明显好于12常数,即6常数模型更可取。
表1 参考星不同分布情况下所有验证星归算结果的比较
T able 1 A comparison of reduction results with different distribution of reference stars
模型Δαi /(″)σα/(″
)Δδi /(″)σδ/(″)参考星较均匀分布
6
0.0020.0530.0060.05612
0.0070.0540.0100.056参考星局部区域分布
6
0.2140.1100.0760.068120.2360.2590.3590.321
图3 参考星局部区域分布时6常数和12常数模型下归算结果的比较
Fig.3 A comparison of the reduction results between the 6and 12constantsplate models with a
regional distribution of reference stars
综合图2、图3和表1可见,对于北京天文台视场为1°×1°的CCD 观测,完全可以采用6常数归算模型。如上所述,CCD 联合平差方法是通过重叠区域中的共同星建立底片参数之间的关系,这样的关系要求能够较好地代表整张底片。为提高观测的效率,重叠区域不可能很大,比如仅占1/4视场。结合以上实例验证,采用6常数归算模型较为可取。通常情况下视场11第24期 CCD 联合平差方法及其初步实例检验
可能更小(比如仅数十平方角分),且为非标准天区,星的密度较低,底片重叠区域的共同星数很有限,低常数模型将会更有利于提高参数的解算精度。
3.2关于切点位置改正
若在CCD联合平差中采用线性6常数模型,则意味着标准坐标系W-ξη和量度坐标系O-xy严格在同一个切平面内。根据CCD联合平差原理,以视场平面与天球的切点W(α0,δ
)为原点,在切平面上建立标准坐标系W-ξη,同时建立量度坐标系O-xy。但是在实际观测中,每张CCD切点的确切位置并非准确已知,只能以一个近似切点W′(α0+dα0,δ0+ dδ0)为原点(比如望远镜指向点),在近似切平面上建立标准坐标系W′-ξ′η′,其中dα0,dδ0为近似切点相对于真切点的位置偏离。不难证明,坐标系W-ξη与W′-ξ′η′之间存在一个角度为dα0/cosδ0和dδ0的微小旋转。当满足|t g(dα0/co sδ0)-dα0/co sδ0|≤1mas且|t g(dδ0)-dδ0|≤1mas的条件时,旋转关系可近似为平移关系,坐标系W-ξη与W′-ξ′η′将近似位于同一平
面内,即满足应用6常数模型的前提条件。计算表明,对于赤道附近的观测将要求|dα0|和|dδ0|小于8′。可见,对于小视场CCD观测(如10′×10′),切点只需位于视场内即可,无需进行切点位置改正。对于较大视场CCD观测(如1°×1°),可首先通过场星做切点位置改正,精度取决于参考星表的位置精度,但至少应保证在8′之内。
3.3关于共同星较差改正
根据(16)式,CCD重叠区域内的共同星在两次观测历元中的较差改正主要包括较差自行改正、较差岁差与章动改正、较差视差改正、较差光行差改正、较差光线引力弯曲改正和较差大气折射改正。对于较差自行改正,如果共同星采用依巴谷星,自行误差约为1mas/a。当重叠底片观测历元之差小于0.1a时,较差自行引起的误差在0.1mas量级,因而对于地面光学天体测量完全可以忽略。即使历元差为1a,较差自行误差达到1mas量级,仍可忽略。可见对共同星中的依巴谷星,自行误差的较差影响可以不考虑。非依巴谷星的自行误差需要视情况处理。按照恒星自行平均量级在50mas/a考虑,如果历元差仅几天到十几天,较差自行误差仍可忽略。如果历元差较大,比如1a,或者根本没有自行数据,此时将不可轻易忽略。处理方法为:要么仅利用自行小的共同星,要么按观测历元的间隔重新划分天区,以保证共同星的较差自行误差可以忽略。但是无论如何,由于方程数目的限制,不可能在平差过程中同时解算自行参数。
对于共同星的较差岁差与章动改正、较差光行差改正、较差视差改正、较差光线引力弯曲改正和较差大气折射改正可按照常规天体测量标准程序一一进行处理,其中主要项是较差大气折射改正,例如对天顶距约40°的天体,中天附近时角相差8min的两次观测,大气折射在赤经方向的改正相差约2″。观测时刻大气折射改正为:
Δρ=ρ站-ρ观=ρ观×(ρ观×ρ天顶).(19)其中ρ站,ρ观分别为天体在观测历元的站心位置和观测位置,ρ天顶为观测历元的天顶方向,
k=R sec(z),R=60″.4
P
760
1+t
273,P
为以毫米水银柱计算的气压,t为大气摄氏温
度,z为视天顶距。,它在两次观测中的大气折射较差改正公式为Dρ=k1ρ观1×(ρ观1×ρ天顶1)-k2ρ观2×(ρ观2×ρ天顶2).(20) 21中国科学院上海天文台年刊 2003年
图4 CCD 角对中心重叠观测示意图Fig.4 The corner -to -center CCD observations 因此,对共同星做大气折射较差改正时需要已知星的观
测位置初值、两次观测的地方恒星时、温度、气压和观测
地纬度。
3.4关于法方程的解算方法
根据联合平差的原理,条件方程AX =C 分为由参
考星提供的误差方程和共同星提供的约束方程两个部
分,以图4中所示的CCD 重叠模式为例,条件方程的形
式为B 100000B 20
0000B 30
0000B 40
0000B 5b 130b 31000b 23b 320000b 34b 43000b 350
b 53X 1X 2X 3X 4
X 5=
D 1D 2D 3D 4D 5d 13d 23
d 34
d 35.(21)其中B i 和D i 分别对应第i 张CCD 上参考星提供的误差方程的系数矩阵和常数矩阵;b ij ,b ji 和d
ij 分别为对应第i 张与第j 张CCD 重叠区域内共同星提供的约束方程的系数矩阵和常数矩阵;X i 对应第i 张CCD 待求参数矩阵。与式(21)对应的法方程A T AX =A T C 的系数矩阵为
A T A =
B T 1B 1+b T 13b 130
b T 13b 31000B T 2B 2+b T 23b 23
b T 23b 3200b T 31b 13b T 32b 23B T 3B 3+…+b T 35b 35b T 34b 43
b T 35b 5300b T 43b 34B T 4B 4+b T
43b 43000b T 53b 350
B T 5B 5+b T 53b 53.(22)
上式中每一“形式”元素均为N par ×N par 方阵,N par 为CCD 底片模型的参数个数。当第i 张与第k 张CCD 无重叠区域时,上式第ik 和第ki “形式”元素为零矩阵。
若底片总数为N ,且N par =6,则法方程系数矩阵元素的总个数为ΣN =N 2N 2par 。如果采用图
4所示的角对心重叠方式,即每张CC D 最多有4个重叠区域,则法方程系数矩阵的非零元
素个数最多为Σn =5N ×N 2par ,零元素至少为ΣN -Σn =N (N -5)N 2par 。比如,N =100时,
Σn =18000,ΣN -Σn =342000;N =500时,Σn =90000,ΣN -Σn =8910000;N =1000时,Σn =180000,ΣN -Σn =35820000。可见(22)式为稀疏矩阵,当CCD 数量众多时,直接求逆是不现实的。
写为一般形式,并以图4中3号CCD 为例,以a 3(5,N par ,N par )表示(22)式中对应的非零元素,即
31第24期 CCD 联合平差方法及其初步实例检验
a 3(5,N par ,N par )=
b T 13b 31 b T 23b 32 B T 3B 3+…+b T 35b 35 b T 43b 34 b T 53b
35
T .(23)对上式作消元变换,比如将b T 13b 31变换为b T 13b 31-b T 13b 31?(B T 3B 3+…+b T 35b 35)?(B T 3B 3+…+b T 35b 35)-1=0,
并将法方程中对应的重叠底片非零系数矩阵和常数矩阵作相应变换,最终将(23)式的非零元素集中在N par ×N par 的方阵,记作P 3。对其余底片作类似处理,参考(22)式可知,此时P 3各元素均不受影响,但P 3所对应的常数矩阵需作相应变换。最后,求解P i X i =d i (i =1,…,N )。d i 为变换后的常数矩阵,进而分别得到各CCD 的底片常数。该算法并未引进任何前提假设,由计算机语言也不难实现。但在内存需求上相对于直接对(22)式求逆将有数量级上的降低。
4 CCD 联合平差方法的初步实例检验
本节采用实测资料对CCD 联合平差方法进行初步检验,主要讨论:(1)单张CCD 观测参考星数量过少,(2)参考星分布不均,(3)个别参考星存在位置偏差,(4)区域性参考星存在位置偏差等情况,以检验CCD 联合平差方法的可行性与实际效果。实测资料仍然选取2002年6月1日北京天文台兴隆观测基地施密特望远镜配备的CCD 对第M 个标准天区的观测。观测时,采用角对心重叠方式拼接成一带状,每个重叠区域约有50颗共同星,取其中6张作为分析对象。参照标准天区星表,将视场内所有星转化为观测位置,并利用场星改正每张CCD 的切点位置,精度保证在8′内。
对单张CCD 观测进行归算时,若参考星数目过少、甚至没有参考星,则不可能获得归算结果。即使参考星数目足够,但分布不均,也难以获得满意效果。再者,个别参考星或局部区域内的参考星可能有位置偏差,这肯定会对归算结果产生不利影响。为检验CCD 观测联合平差的效果,以下对上述各情况分别讨论。基本检验方法为,依据标准天区内星的密度高且位置与自行资料准确的特点,人为指定参考星,对CCD 观测采用6常数模型进行处理,并考虑各种常规较差改正,最后用标准天区星表资料对归算结果进行检验。
4.1单张CCD 观测参考星数目过少的情况
对于参考星总体分布如图5所示的情况,此时单张CCD 观测各仅有一颗参考星,采用常规方法不能进行单独处理。由于CCD 观测覆盖天区内存在6颗参考星,通过共同星的过渡,采用联合平差方法能够同时获得所有底片的模型常数,进而推算出所有场星的观测位置坐标。计算表明,
归算坐标与标准天区星表资料之差在赤经和赤纬两个方向的均值与均方差分别为
图5 参考星(3)的天区分布(参考星数目过少的情况)
Fig.5 The distribution of the reference stars (3) (For the case that no sufficient reference stars )
41中国科学院上海天文台年刊 2003年
Δα=-0″.007,σα=0″.099;Δδ=-0″.062,σδ=0″.160。就数值而言,
赤纬方向归算精度相对略差,这可能与赤纬方向参考星分布天区相对略窄有关。参考星的分布区域在赤经方向达到3°,而赤纬方向仅有1°。观测覆盖天区分别为3°.5和1°.5。
4.2单张CCD 观测参考星分布不均的情况
对于参考星总体分布如图6所示情况,此时可对每张CCD 进行单独归算,也可进行整体的联合平差归算。以第4张CCD 为考察对象,图7显示了参考星的分布以及验证星归算位置同标准天区星表资料之差的比较,其中“☆”表示参考星位置,实线箭头和虚线箭头分别对应联合平差和单张CCD 归算结果
。
图6 参考星(3)的天区分布(参考星分布不均的情况)
Fig.6 The distribution of the reference stars (3) (F or the case that the reference stars are not evenly
distributed
)
图7 单张CCD 上参考星分布不均匀时联合平差和单张CCD 归算结果的比较
Fig.7 A comparison of the reduction results between block ad justment and single plate solution
with an uneven distribution of reference stars
表2列出归算结果同星表位置之差的均值与均方差。综合图7与表2可见,联合平差归算结果好于单张CCD 观测独立归算的结果,即联合平差方法很大程度上削弱了单张CCD 参51第24期 CCD 联合平差方法及其初步实例检验
考星分布不均对归算结果的影响。
表2 不同归算方法结果的比较(参考星分布不均的情况)
T able 2 A comparison of results with different reduction methods
(for the case of uneven distribution of reference stars)
归算方法
Δαi /(″)σα/(″)Δδi /(″)σδ/(″)单张CCD 归算
-0.0880.3100.1240.541联合平差-0.0190.066-0.0530.084
4.3个别参考星存在位置偏差的情况
每张CCD 上取均匀分布的4颗参考星,人为将第4张CCD 上的某颗参考星的位置调偏(在赤经方向增加1″),分别进行单张CCD 归算和联合平差归算。图8显示出第4张CCD 上参考星的分布以及归算位置同标准天区星表位置之差的比较情况,其中“☆”表示参考星位置,实线箭头和虚线箭头分别对应联合平差和单张CCD 归算结果。表3列出第4张CCD 上归算位置同星表位置之差的均值与均方差以及个别参考星位置偏差经过归算的矫正程度。综合图8与表3可见,联合平差使得个别参考星在归算中的地位相对下降,进而削弱了个别参考星位置偏差对归算结果的影响。并且,通过联合平差能够较好地矫正个别参考星的位置偏差。如有必要可以经过几次迭代,更好的消除个别参考星的位置偏差。表3同时列出了经过一次迭代后的矫正情况
。
图8 个别参考星存在位置偏差时联合平差和单张CCD 归算结果的比较
Fig.8 A comparison of the reduction results between block ad justment and single plate solution
(for the case that a reference star with position bias )
61中国科学院上海天文台年刊 2003年
表3 不同归算方法结果的比较(个别参考星存在位置偏差的情况)
T able 3 A comparison of results with different reduction methods
(for the case that a reference star with position bias)
归算方法
Δαi /(″)σα/(″)Δδi /(″)σδ/(″)归算后个别偏差的矫正程度单张CCD 归算
0.2050.2860.0370.05831.3%联合平差
0.0660.0750.0130.09090.6%联合平差
(迭代一次)0.0140.0550.0110.090104.7%
4.4局部区域参考星存在位置偏差的情况
每张CCD 上取均匀分布的四颗参考星,将第4张CCD 上所有参考星统一加偏差(在赤经
方向增加1″
),分别进行单张CCD 归算和联合平差归算。图9显示出第4张CCD 上参考星的分布以归算位置同标准天区星表位置之差的比较情况,其中“☆”表示参考星位置,实线箭头和虚线箭头分别对应联合平差和单张CCD 归算情况。表4列出第4张CCD 上归算位置同星表位置之差的均值与均方差以及参考星系统性位置偏差经过归算后的矫正程度。综合图9与表4可见,参考星系统差的存在使得单张CCD 归算结果也存在一个同样量级的系统差,而联合平差归算可削弱这一系统性位置偏差的影响,而且通过进一步迭代,能够改进归算结果。表4同时列出经过一次迭代后的归算情况
。
图9 参考星存在系统性位置偏差时联合平差和单张CCD 归算结果的比较
Fig.9 A comparison of the reduction results between block ad justment and single plate solution
(for the case that reference stars with systematic position bias )
7
1第24期 CCD 联合平差方法及其初步实例检验
表4 联合平差和单张CCD归算结果的比较(参考星存在系统性位置偏差的情况) T able4 A comparison of results with different reduction methods
(for the case that reference stars with systematic position bias)
归算方法Δαi/(″)σα/(″)Δδi/(″)σδ/(″)归算后个别偏差的矫正程度
单张CCD归算0.9720.0580.0370.058
联合平差0.4830.1200.0110.09051.0%
联合平差
(迭代一次)
0.2400.0730.0110.09074.1%
5 结 束 语
本文采用严格的矢量方法推导出CCD联合平差公式,理论上能够实现待测星相对于河外天体的定位,不再受到天区范围的限制,进而削弱星表系统差和局部差对定位结果的影响。此方法可以充分利用地面光学望远镜的优势,发挥其在射电与光学参考架的连接、标准天区的扩充、特殊天体的定位等方面的应用潜力。
本文在严格矢量表述基础上,讨论了CCD联合平差方法实现中的几个问题,分析了相应的解决方法。具体为:(1)实测资料验证表明,联合平差中采用线性6常数模型已经足够;(2)小视场观测情况下可以忽略切点位置改正,较大视场情况下要求利用场星将切点位置改正至8′之内;(3)共同星较差项改正主要应考虑自行误差和大气折射效应,文中提出了相应处理方法;(4)联合平差方程参数众多,且法方程系数矩阵为稀疏型,直接求逆耗时过多,甚至由于计算机内存限制而不可实现,基于系数矩阵特性分析,建议参考天测与测地VLB I资料分析软件SOLV E中的参数分类方法,实现分块求解。
最后利用北京天文台施密特望远镜配备的CCD对第M个天体测量标准天区的观测资料,验证了CCD联合平差方法的效果,初步表明联合平差方法可以削弱个别CCD上参考星数量不足、分布不均匀以及个别参考星位置偏差和局部小天区系统性位置偏差对归算结果的影响,进而达到扩大视场和提高归算结果精度的目的。
由于缺少必要的观测资料,本文未涉及大天区观测和相对于河外天体的定位等方面对CCD联合平差方法的检验。
参 考 文 献
1 Eichhorn H.In:Debarbats et al.eds.Mapping the Sky,Dordrecht:K luwer,1988:177
2 艾科恩H.恒星方位天文学(中译本),任江平等译.北京:测绘出版社,1981:41
3 Eichhorn H.AJ,1967,72:626
4 G ooge W D,Eichhorn H,Lukac C F et al.MNRAS,1970,150:35
5 de Vegt Chr,Ebner H.A&A,1972,17:276
6 Zacharias N.A&A,1992,264:296
7 Stock J.Rev.Mexicana Astron.Astrof.,1981,6:115
8 Stock J,Cova S J et al.Rev.Mexicana Astron.Astrof.,1983,5:233
81中国科学院上海天文台年刊 2003年
9 Taff L G.AJ ,1988,96(1):409
10 Abad C.A &AS ,1993,98:1
11 Bustos Fierro I H ,Calderon J H et al.Rev.Mexicana Astron.Astrof.,2000,36:89
12 冒蔚等.基本星表和天球参考系,北京:科学出版社,1990.352
13 塔夫L G.计算球面天文学,凌兆芬,毛昌鉴译.北京:科学出版社,1992:135THE SY NTHESIZED RED UCTION METH OD OF CCD
OBSERVATIONS AN D ITS PRE L IMINAR Y EXAMINATION
YU Y ong L I Jinling TAN G Zhenghong WAN G Guangli ZHAO Ming
(Shanghai Astronomical Observatory ,Chinese Academy of Sciences ,Shanghai 200030)
Abstract
In the routine photographic astrometry ,the position determination of faint celestial body is realized by using multi -step transition of reference stars.Because of the systematic and regional errors of star catalogues ,in the ultimate position determination there may exist serious accumula 2tion of various errors.Also ,it is difficult to find sufficient reference stars in the small viewing field of a single CCD observation.In this paper ,the rigorous vectorial expression of the block ad 2justment of CCD observations is deduced in order to realize a synthesized reduction of CCD obser 2vations within large sky coverage and connected by common stars of overlapping observations.Theoretically ,the position determination relative to extragalactic bodies can be realized by using this method and so the influence of the systematic and regional errors of catalogues on the final po 2sitioning results could be eliminated.Some key points in the realization of the block adjustment of CCD observations are discussed.The pertinent issues are the selection of plate constant models ,the position correction of the tangential point ,the differential corrections of common stars and the special treatment of the normal observation equation.Their corresponding measures are recom 2mended.The effects of the block adjustment of CCD observations are also preliminarily examined with real case data.It is shown that the block adjustment method can improve the final reduction results compared with the independent reduction of CCD observations in several cases including that (1)no sufficient reference stars in a single CCD observation ,(2)uneven distribution of ref 2erence stars in a single CCD observation ,(3)a reference star with position bias and (4)regional reference stars with systematic position biases.Therefore ,the block adjustment method of CCD observations can effectively extend the viewing field of CCD observation and improve the precision of the reduction results.
K ey w ords photographic astrometry —overlapping observations —CCD observations —combi 2
nation solution of observations 9
1第24期 CCD 联合平差方法及其初步实例检验
(误差理论与测量平差础) 课程设计报告 系(部):土木工程系 实习单位:山东交通学院 班级:测绘084 学生姓名:田忠星学号080712420 带队教师:夏小裕﹑周宝兴 时间:10 年12 月13日到10 年12 月19日 山东交通学院
目录: 1.摘要P3 2.概述P3 3.水准网间接平差程序设计思路P3—P4 4. 平差程序流程图P4—P6 5. 程序源代码及说明P7—P23 6. 计算结果P23—P26 7. 总结P26—P27
一:摘要 在测量工作中,为了能及时发现错误和提高测量成果的精度,常作多余观测,这就产生了平差问题。在一个平差问题中,当所选的独立参数X?的个数等于必要观测数t时,可将每个观测值表达成这t个参数的函数,组成观测方程,这种以观测方程为函数模型的平差方法,就是间接平差。 二:概述: 该课程设计的主要目是对水准网进行间接平差,在输入数据后依次计算高程近似值﹑误差方程和平差计算。 三:水准网间接平差程序设计思路 1.根据平差问题的性质,选择t个独立量(既未知点的高程)作为参数X? 2. 将每一个观测量的平差值(既观测的高程差值)分别表达成 3.由误差方程系数B和自由项组成法方程,法方程个数等于参数的个数t ; 4. 解算法方程,求出参数X?,计算参数(高程)的平差值 X?=X0 +x?; 5.由误差方程计算V,求出观测量(高差)平差值6.评定精度 单位权中误差 V L L+ = ∧ V L L+ = ∧
平差值函数的中误差 四:平差程序流程图 1. 已知数据的输入 需要输入的数据包括水准网中已知点数﹑未知点数以及这些点的点号,已知高程和高差观测值﹑距离观测值。程序采用文件方式进行输入,约定文件输入的格式如下: 第一行:已知点数﹑未知点数﹑观测值个数 第二行:点号(已知点在前,未知点在后) 第三行:已知高程(顺序与上一行的点号对应) 第四行:高差观测值,按“起点点号,终点点号。高差观测值,距离观测值”的顺序输入。 本节中使用的算例的数据格式如下 2,3,7 1,2,3,4,5 5.016,6.016 1,3,1.359,1.1 1,4,2.009,1.7 2,3,0.363,2.3 ,?20s u n PV V r PV V T T +-==σ. ???0????σσQ =
在图 表9-1 试求: (1)1P 、2P 及3P 点高程之最或然值; (2)1P 、2P 点间平差后高差的中误差。 解:(1)列条件方程式,不符值以“mm ”为单位。 已知3,7==t n ,故437=-=r ,其条件方程式为 ??? ? ???=--+=-+--=-+--=++-01030707742643765521v v v v v v v v v v v v (2)列函数式: 555v h x F +== 故 15=f 0764321======f f f f f f (3)组成法方程式。 1)令每公里观测高差的权为1,按1/i i s p =,将条件方程系数及其与权倒数之乘积填于表9-2中。 2)由表9-2数字计算法方程系数,并组成法方程式:
????????????----------5221251021411013????????????d c b a k k k k +????? ???????---1377=0 表9-2 条件方程系数表 (4)法方程式的解算。 1)解算法方程式在表9-3中进行。 2)[]pvv 计算之检核。 [][]wk pvv -= []467.35=-wk 由表9-3中解得[]47.35-=pvv ,两者完全一致,证明表中解算无误。 (5)计算观测值改正数及平差值见表9-4。 (6)计算321,,P P P 点高程最或然值。 359.3611=+=x H H A P m 012.3722=+=x H H A P m
表9-4 改正数与平差值计算表 (7)精度评定。 1)单位权(每公里观测高差)中误差 2)21,P P 点间平差后高差中误差 mm 0.34 47.35±=±=μmm P m F F 2.252.00.31 ±=±=±=μ
单一闭附合图根导线近似平差计算程序(PM3-1) (2) 程序PM3-1,占用内存1848字节。 "CLOSED Or CONNECTING MAPPING TRAVERSE PM3-1"显示程序标题 Norm 1 "CLOSED(0) Or CONNECTING(1)="?Z导线类型,0为闭合导线,1为附合导线 "UNKNOWN POINT n="?P未知导线点数 Deg:Fix 3设置十进制度为单位 "XA(m),0 To BEAR A B(Deg)="?A输入已知点A的x坐标或输入≤0的数值 If A>0:Then "YA(m)="?B:Else "BEAR A B(Deg)="?R:IfEnd A>0时为输入A点y坐标,否则为输入A→B的方位角 "XB(m)="?C:"YB(m)="?D输入已知点B的坐标 If A>0:Then Pol(C-A,D-B):Cls计算A→B的方位角 If J<0:Then J+360R:Else J R:IfEnd "DIST A B(m)=":I显示A→B的水平距离 "BEAR A B(DMS)=":R显示A→B的方位角 IfEnd If Z=1:Then "XC(m)="?E:"YC(m)="?F附合导线,继续输入已知点C的坐标 "XD(m),0 To BEAR C D(Deg)="?G输入已知点D的x坐标或输入≤0的数值 If G>0:Then "YD(m)="?H:Else "BEAR C D(Deg)="?S:IfEnd G>0时为输入D点y坐标,否则为输入C→D的方位角 If G>0:Then Pol(G-E,H-F):Cls计算C→D的方位角 If J<0:Then J+360S:Else J S:IfEnd "DIST C D(m)=":I显示C→D的水平距离 "BEAR C D(DMS)=":S显示C→D的方位角 IfEnd Else If R>180:Then R-180S:Else R+180S:IfEnd闭合导线计算A→B的反方位角"BEAR B A(DMS)=":S显示B→A方向的方位角 IfEnd ClrStat:FreqOn清除统计串列List X,List Y,List Freq,打开频度串列 0M累加边长和变量清零 For 1I To P+1 Norm 1:"POINT n=":I显示当前输入的观测数据计数 "ANGLE(Deg)="?List X[I]输入水平角观测值 "DIST(m)="?List Y[I]输入水平距离观测值 List Y[I]+M M累加水平距离和 If I=1:Then R+List X[I]L:Else List Freq[I-1]+List X[I]L:IfEnd推算导线边方位角 If L>180:Then L-180L:Else L+180L:IfEnd If L>360:Then L-360L:IfEnd判断方位角是否大于360 L List Freq[I]存储导线边方位角 Next "LAST ANGLE(Deg)="?List X[P+2]输入最后一个水平角 List Freq[P+1]+List X[P+2]L If L>180:Then L-180L:Else L+180L:IfEnd If L>360:Then L-360L:IfEnd判断方位角是否大于360 L List Freq[P+2]存储最后一个方位角 3600(L-S)U以秒为单位的方位角闭合差 Fix 1:"ANGLE CLOSE ERROR(S)=":U显示方位角闭合差 60(P+2)W以秒为单位的方位角闭合差限差
《测绘程序设计(https://www.doczj.com/doc/fd7732269.html,)》 上机实验报告 (Visual C++.Net) 班级:测绘0901班 学号:0405090204 姓名:代娅琴 2012年4月29日
实验八平差程序设计基础 一、实验目的 ?巩固过程的定义与调用 ?巩固类的创建与使用 ?巩固间接平差模型及平差计算 ?掌握平差程序设计的基本技巧与步骤 二、实验内容 水准网平差程序设计。设计一个水准网平差的程序,要求数据从文件中读取,计算部分与界面无关。 1.水准网间接平差模型: 2.计算示例:
近似高程计算:
3.水准网平差计算一般步骤 (1)读取观测数据和已知数据; (2)计算未知点高程近似值; (3)列高差观测值误差方程; (4)根据水准路线长度计算高差观测值的权; (5)组成法方程; (6)解法方程,求得未知点高程改正数及平差后高程值; (7)求高差观测值残差及平差后高差观测值; (8)精度评定; (9)输出平差结果。 4.水准网高程近似值计算算法 5.输入数据格式示例
实验代码: #pragma once class LevelControlPoint { public: LevelControlPoint(void); ~LevelControlPoint(void); public: CString strName;//点名 CString strID;//点号 float H; bool flag;//标记是否已经计算出近似高程值,若计算出则为,否则为}; class CDhObs { public: CDhObs(void); ~CDhObs(void); public: LevelControlPoint* cpBackObj;//后视点 LevelControlPoint* cpFrontObj;//前视点 double ObsValue;//高差值 double Dist;//测站的距离 }; #include"StdAfx.h" #include"LevelControlPoint.h" LevelControlPoint::LevelControlPoint(void) {
工程测量案例 ●隧道控制测量案例 ●大比例尺地形图测量案例 ●变形监测案例 ●施工测量案例 ●市政工程测量案例 一、隧道控制测量案例 背景材料 在某新建铁路线上,已有首级控制网数据。有一隧道长10Km,平均海拔500m,进出洞口以桥梁和另外两标段的隧道相连。为保证双向施工,需要按GPS C级布设平面控制网和进行二等水准测量。 仪器设备:单、双频 GPS 各6台套、S3光学水准仪5台、数字水准仪 2台(0.3mm/Km)、2 秒级全站仪 3台。 计算软件:GPS 数据处理软件、水准测量平差软件。 分析要点: 建立隧道控制网的主要作用是保证隧道的正确贯通。隧道控制包括地面和洞内两部分。 原有地面控制点精度、点位不满足贯通要求时,建立隧道独立控制网。如点位不满足,则进行加密。平面控制网按GPS C级布设,每个洞口3个点,进洞点和方位点间要通视,如边长小于500 m 应设强制对中观测墩。高程为二等水准,每个洞口 2个点。 GPS控制网采用6台双频GPS观测,二等水准采用 2台数字水准仪分两组观测。 考试样题 单项选择题: 1.长度大于4Km的隧道地面平面控制测量优先采用( C )。 A.导线测量 B.三角形网测量 C.GPS测量 2.二等水准测量往返测高差不符值为( A )。 A.4√K B.6√K C.8√K 简答题: 1.在控制测量观测之前,需要做哪些准备工作? 资料收集、现场踏勘、选点埋石、方案设计。 2.为满足工程需要,应选用哪些仪器进行测量?
采用6台双频GPS接收机和2台数字水准仪。 3.最终提交的成果应包括哪些内容? (1)技术设计书 (2)仪器检验校正资料 (3)控制网图、点之记 (4)控制测量外业观测资料 (5)控制测量计算及成果资料 (6)所有测量成果及图件电子文件 二、大比例尺地形图测量案例 背景材料: 某水库规划为城市供水,需进行水库地区地形测量。测区面积15Km2,为丘陵地区,海拔高50~120m。山上灌木丛生,通视较差。需遵照《城市测量规范》1︰1000地形图,工期 60 天。 已有资料:国家二等三角点 1 个、D 级GPS点 1 个,国家一等水准点 2 个。作为平面和高程控制起算点。 坐标和高程系统、基本等高距、图幅分幅:采用54北京坐标系和1956年黄海高程系。基本等高距1.0m。50×50矩形分幅。 提交成果资料: (1)技术设计书 (2)仪器检验校正资料 (3)控制网图 (4)控制测量外业观测资料 (5)控制测量计算及成果资料 (6)地形图 (7)所有测量成果及图件电子文件 分析要点: 地形图基本内容: 数学要素包括比例尺、坐标格网、控制点坐标等。地形要素包括各种地物(以比例符号、非比例符号、半比例符号表示)、地貌(以等高线表示)。图内注记要素和图廓整饰要素。 碎部测量: 碎部测量是以控制点为基础,测定地物、地貌的平面位置和高程,并绘制成地形图。大比例尺地形图测量案例
//////////////////////////////////////////////////// // visual C++6.0 编译通过 // //////////////////////////////////////////////////// /////////////////////////////////////////////////// // 参考资料 // // 部分网络资料 // // 宋力杰《测量平差程序设计》 // //连壁《基于matlab的控制网平差程序设计》 // /////////////////////////////////////////////////// #include
全站仪观测导线测量平差方法的研究 邱健壮1,赵燕2,李宗才3 (1.山东农业大学水利土木工程学院,山东泰安 271018;2.龙口市土地管理局;3.临沂市岸 堤水库管理局) 摘要:针对全站仪观测导线能够即时直接得到待定点的近似坐标的特点,从而提出了便于实际应用的近似坐标平差和严密坐标平差方法。分析了其原理和优点,并给出了实际操作的公式。 关键词:导线;平差;方位角;间接平差 中图分类号: TU204 文献标识码:A 文章编号:1000-2324(2003)01-0096-04 RESEARCH OF TRAVERSE ADJUSTMENT METHOD USING GENERAL TOTAL STATION QIU Jian-zhuang,ZHAO Yan,LI Zong-cai (College of Water Conservancy and CivilEngineering,Shandong Agricultural University,Taian,271018,China) Abstract:On the basis of the characteristic that General Total Station can obtain immediately the approximate coordinates of point during observing traverse.This paper introduces the adjustment method of approximate and rigorous coordinates convenient to realistic application,and analysizes its theory and application advantages,and gives the formula convenient to realistic operation. Key words: traverse,adjustment,azimuth,adjustment by observation equations 1 问题的提出 随着全站仪在工程测量中应用的逐渐普及,采用导线作为测量的平面控制越来越广泛,导线一般多布设成单一导线。应用全站仪观测导线,可以通过机内的微处理器,直接得到地面点的平面近似坐标,因此在成果处理时可以应用这些近似坐标直接按坐标平差(即间接平差)法进行平差。这将优于过去导线计算过程中先进行边、角平差后,再求取坐标的方法。本文主要针对采用全站仪观测导线的近似平差和严密平差方法进行探讨。 2 导线的近似坐标平差 导线测量用于图根控制等低精度测量中,往往采用近似平差即可。由于全站仪直接测定各导线点的近似坐标值,平差计算就不用像传统的导线近似平差计算那样,先进行角度闭合差计算和调整,然后推算方位角,再进行坐标增量闭合差的计算和调整,最后根据平差后的坐标增量计算导线点的坐标。全站仪观测导线直接按坐标平差计算,将更为简便。直接按坐标平差法计算步骤如下:
测绘程序设计实验八水准网平差程序设计报告 Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】
《测绘程序设计》上机实验报告 (Visual C++.Net) 班级:测绘0901班 学号: 04 姓名:代娅琴 2012年4月29日
实验八平差程序设计基础 一、实验目的 巩固过程的定义与调用 巩固类的创建与使用 巩固间接平差模型及平差计算 掌握平差程序设计的基本技巧与步骤 二、实验内容 水准网平差程序设计。设计一个水准网平差的程序,要求数据从文件中读取,计算部分与界面无关。 1.水准网间接平差模型: 2.计算示例:
近似高程计算: 3.水准网平差计算一般步骤 (1)读取观测数据和已知数据; (2)计算未知点高程近似值; (3)列高差观测值误差方程; (4)根据水准路线长度计算高差观测值的权; (5)组成法方程; (6)解法方程,求得未知点高程改正数及平差后高程值; (7)求高差观测值残差及平差后高差观测值; (8)精度评定; (9)输出平差结果。 4.水准网高程近似值计算算法
5.输入数据格式示例 实验代码: #pragma once class LevelControlPoint { public: LevelControlPoint(void); ~LevelControlPoint(void);
public: CString strName;trName=pstrData[0]; m_pKnownPoint[i].strID=pstrData[0]; m_pKnownPoint[i].H=_tstof(pstrData[1]); m_pKnownPoint[i].flag=1;trName=pstrData[i]; m_pUnknownPoint[i].strID=pstrData[i]; m_pUnknownPoint[i].H=0;lag=0;pBackObj=SearchPointUsingID(pstrData[0]);pFrontObj=Sea rchPointUsingID(pstrData[1]);ObsValue=_tstof(pstrData[2]);ist=_tstof(pstrData[3]);trID==ID) {return &m_pKnownPoint[i];} } return NULL; } trID==ID) {return &m_pUnknownPoint[i];} } return NULL; } LevelControlPoint* AdjustLevel::SearchPointUsingID(CString ID) { LevelControlPoint* cp; cp=SearchKnownPointUsingID(ID); if(cp==NULL) cp=SearchUnknownPointUsingID(ID); return cp; } void AdjustLevel::ApproHeignt(void)lag!=1) { pFrontObj->strID==m_pUnknownPoint[i].strID) && m_pDhObs[j].cpBackObj->flag==1 ) { =m_pDhObs[i].cpBackObj->H - m_pDhObs[i].ObsValue;*/ m_pUnknownPoint[i].H=m_pDhObs[j].cpBackObj->H + m_pDhObs[j].HObsValue; m_pUnknownPoint[i].flag=1; break; } } if(m_pUnknownPoint[i].flag!=1)pBackObj- >strID==m_pUnknownPoint[i].strID) && m_pDhObs[j].cpFrontObj->flag==1 ) { =m_pDhObs[j].cpFrontObj->H-m_pDhObs[j].HObsValue;
闭合导线平差计算步骤: 1、绘制计算草图。在图上填写已知数据和观测数据。 2、角度闭合差的计算与调整 (1)计算闭合差: (2)计算限差:(图根级) (3)若在限差内,则按平均分配原则,计算改正数: (4)计算改正后新的角值: 3、按新的角值,推算各边坐标方位角。 4、按坐标正算公式,计算各边坐标增量。 5、坐标增量闭合差的计算与调整 (1)计算坐标增量闭合差。有: 导线全长闭合差: 导线全长相对闭合差: (2)分配坐标增量闭合差 若 K<1/2000 (图根级),则将、以相反符号,按边长成正比分配到各坐标增量上去。并计算改正后的坐标增量。
6、坐标计算 根据起始点的已知坐标和经改正的新的坐标增量,来依次计算各导线点的坐标。 [ 例题 ] 如图所示闭合导线,试计算各导线点的坐标。 计算表格见下图:
闭合水准路线内业计算的步骤: (1) 填写观测数据 (2) 计算高差闭合差 h f =∑h ,若h f ≤容h f 时,说明符合精度要求,可以进行高差闭合差的调整;否则,将重新进行观测。 (3) 调整高差闭合差 各段高差改正数: i h i i h i L L f V n n f V ·· ∑-= ∑-= 或 各段改正高差: i i i V h h +=改 (4) 计算待定点的高程 闭合差(fh ) 水准路线中各点间高差的代数和应等于两已知水准点间的高差。若不等两者之差称为闭合差 高差闭合差的计算 .支水准路线闭合差的计算方法 .附合水准路线闭合差的计算方法 .闭合水准路线闭合差的计算方法 高差闭合差容许值 (n 为测站数,适合山地) (L 为测段长度,以公里为单位,适合平地) 水准测量中,消除闭合差的原则一般按距离或测站数成正比地改正各段的观测高差
导线实例 这就是一条符合导线的测量数据与简图,A、B、C与D就是已知坐标点,2、3与4就是待测的控制点。 测站点角度(°′″) 距离(米) X (米) Y(米) B 8345、8709 5216、6021 A 85、30211 1474、4440 7396、2520 5530、0090 2 254、32322 1424、7170 3 131、04333 1749、3220 4 272、20202 1950、4120 C 244、18300 4817、6050 9341、4820 D 4467、5243 8404、7624 导线原始数据表 导线图如下: 导线图 在平差易软件中输入以上数据,如下图“数据输入”所示:
数据输入 在测站信息区中输入A、B、C、D、2、3与4号测站点,其中A、B、C、D为已知坐标点,其属性为10,其坐标如“原始数据表”;2、3、4点为待测点,其属性为00,其它信息为空。如果要考虑温度、气压对边长的影响,就需要在观测信息区中输入每条边的实际温度、气压值,然后通过概算来进行改正。 根据控制网的类型选择数据输入格式,此控制网为边角网,选择边角格式。 如下图“选择格式”所示: 选择格式 在观测信息区中输入每一个测站点的观测信息,为了节省空间只截取观测信息的部分表格示意图,如下表 B、D作为定向点,它没有设站,所以无观测信息,但在测站信息区中必须输入它们的坐标。 以A为测站点,B为定向点时(定向点的方向值必须为零),照准2号点的数据输入如下图“测站A的观测信息”所示: 测站A的观测信息 以C为测站点,以4号点为定向点时,照准D点的数据输入如下图“测站C的观测信息”所示: 测站C的观测信息 2号点作为测站点时,以A为定向点,照准3号点,如下图“测站2的观测信息”所示: 测站2的观测信息 以3号点为测站点,以2号点为定向点时,照准4号点的数据输入如下图“测站3的观测信息”所示: 测站3的观测信息 以4号点为测站点,以3号点为定向点时,照准C点的数据输入如下图“测站4的观测信息”所示:
导线测量平差常见问答 一、为何有时计算结果与其它计算有些差异? 答:a.观测角度使用的是前进方向的左角还是右角,本软件采用前进方向的左角,输入负号时表示是前进方向的右角,并转换为左角平差。 b.是否选用了概算,及概算的各选项是否正确。 c.是否使用严密平差,严密平差与近似平差计算结果是不同的。 d.严密平差是否使用迭代平差,有些软件尽管使用严密平差,但只进行单次平差,精度不高。 e.严密平差的先验误差设置是否一致,是否使用了Helmert验后方差定权,软件使用的定权方式可能不一样,导致部分差异。 f.近似平差是否选用了反算等,可以在“项目设置”中更改以适合您的需要。 g.近似平差时是否选用了角度改正前的坐标增量闭合差,这会导致坐标增量闭合差的不一致。 h.高程平差时,水准和三角高程因为定权的不同而有差异,坐标导线按三角高程计算,其它则提供了高差类型的选择。 二、如何选择严密平差或近似平差?近似平差是否需要进行方位角边长反算? 答: 《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。当采用简化方法平差时,应以平差后坐标反算的角度和边长作为成果。 《城市测量规范》规定:四等以下平面控制网可采用近似平差法和按近似方法评定其精度。......采用近似平差方法的导线网,应根据平差后坐标反算的方位角与边长作为成果。 因此,严密平差适用于各等级导线,而近似平差适用于较低等级导线,采用近似平差时应对方位角、角度、边长等进行反算,以便方位角、边长、角度等可以作为最终成果使用。 三、为什么软件中默认的计算表格样式与我们的习惯不一样? 答:成果表格可以自定义,计算表因方案设置的不同而有所不同。 这里主要是因为您使用的是近似平差且不进行反算的格式,而本软件默认是严密平差,当选择近似平差时默认也是进行反算的。可以在项目设置中选择近似平差,并且去掉“方位角、边长反算”等即可获得您所需的格式。 四、近似平差时的坐标增量闭合差为什么与有些书上不一样? 答:近似平差中,计算方案里有一个选项,以让用户选择近似平差是否使用在角度闭合差分配前计算的坐标增量闭合差来反映导线精度。使用角度闭合差分配前计算的坐标增量闭合差将与严密平差一致,否则与通常的手工计算一致。 五、验后测角中误差有时相对于角度闭合差为何显得很大? 答:这主要有以下情况: a.先验误差设置不切实际,相对于测角,将测距先验误差设置过高会导致程序认为误差主要来源于角度,而对角度加以较大的改正数,使得评定的测角中误差较大。 b.测量发生错误,主要可能是边长测量错误,使得坐标增量闭合差太大。 c.已知点精度不高。 六、为什么角度闭合差不是平均分配的? 答:严密平差是按最小二乘法平差,角度闭合差不是平均分配的。 近似平差角度闭合差是平均分配的,但如果计算方案里选择了进行反算,则角度、方位角、边长等都是反算后的最终成果,并不是计算的中间成果,角度改正数也就可能有正有负。
《测量平差程序》课程设计 (报告) 学生姓名:罗正材 学号:1108030128 专业:2011级测绘工程 指导教师:肖东升
目录 一、前言 (3) 二、平差程序的基本要求 (3) 三、平差程序模块化 (3)
图1 四、平差中的重要函数 (一)、角度制与弧度制的相互转化 C/C++程序设计中,关于角度的计算以弧度制为单位,而在测量以及具体工作中我们通常习惯以角度制为单位。这样,在数据处理中,经常需要在角度制与弧度制之间进行相互转化。这里,我们利用C/C++数学函数库math.h中的相关函数完成这两种功能。 这里,我们使用double类型数据表示角度制数和弧度制数。例如:123度44分58.445秒,用double类型表示为123.4458445,其中分、秒根据小数位确定。 在角度制与弧度制的转化中,涉及如下图2所示的两个环节。 度.分秒度弧度 图2 1.角度化弧度函数 double d_h(double angle) //角度化弧度 { double a,b; angle=modf(angle,&a);//a为提取的度值(int类型),angle为分秒值(小数) angle=modf(angle*100.0,&b); // b为提取的分值(int类型),angle为秒值(小数) return (a+b/60.0+angle/36.0)*(PI+3.0E-16)/180.0; } 2.弧度化角度函数 double h_d(double angle) //弧度化角度
{ double a,b,c; angle=modf(angle*180.0/(PI-3.0E-16),&a); angle=modf(angle*60.0,&b); angle=modf(angle*60.0,&c); return a+b*0.01+c*0.0001+angle*0.0001; } 其中,函数modf(angle,&a)为C语言数学库函数,返回值有两个,以引用类型定义的a 返回angle的整数部分,函数直接返回值为angle的小数部分。 (二)近似坐标计算 在平面网间接平差计算中,近似坐标计算是非常重要的一项基础工作。近似坐标是否计算成功是间接平差是否可以进行的必要条件。 1.两方向交会 已知条件:两个点的近似坐标,这两个点到未知点的方位角,如图3所示 图3两方向交会 根据图4.2,设 1 1 α tg k=, 2 2 α tg k=,则很容易写出 ? ? ? ? ? ? - = - - = B P B P A P A P y y k x x y y k 2 1 整理该式,得两方向交会的的计算公式 ?? ? ? ? ? - - = ?? ? ? ? ? ?? ? ? ? ? - - B B A A P P y x k y x k y x k k 2 1 2 1 1 1 (4.1)对(4.1)式计算,即可得到未知点的近似坐标。应用中需要注意的是,若两方向值相同或相反,则该式无解。 程序中,定义该问题的函数为:int xy0ang(obser &a1,obser &a2) 2.三边交会 如图4所示,为排除两边长交会的二义性,给出如下三边交会的模型,已知条件:三个
水准网平差 结果 #include 导线实例 这是一条符合导线的测量数据和简图,A、B、 C 和 D 是已知坐标点,2、3 和 4 是待测的控制点。 导线图如下: 导线图 在平差易软件中输入以上数据,如下图“数据输入”所示: 数据输入 在测站信息区中输入A、B、C、D、2、3和4号测站点,其中A、B、C、D 为已知坐标点,其属性为10,其坐标如“原始数据表”;2、3、4 点为待测点,其属性为00,其它信息为空。如果要考虑温度、气压对边长的影响,就需要在观测信息区中输入每条边的实际温度、气压值,然后通过概算来进行改正。 根据控制网的类型选择数据输入格式,此控制网为边角网,选择边角格式如下图“选择格式”所示: 选择格式 在观测信息区中输入每一个测站点的观测信息,为了节省空间只截取观测信息的部分表格示意图,如下表 B、D 作为定向点,它没有设站,所以无观测信息,但在测站信息区中必须输入它们的坐标。 以A为测站点,B为定向点时(定向点的方向值必须为零),照准2号点的数据输入如下图“测站A 的观测信息”所示: A 的观测信息 以C 为测站点,以4 号点为定向点时,照准D 点的数据输入如下图“测站C 的观测信息”所示: C 2 2 以3 号点为测站点,以2 号点为定向点时,照准4 号点的数据输入如下图“测站3 的观测信息”所示: 3 以4 号点为测站点,以3 号点为定向点时,照准C 点的数据输入如下图“测站4 的观测信息”所示: 测站 4 的观测信息 说明:①数据为空或前面已输入过时可以不输入(对向观测例外) ②在电子表格中输入数据时,所有零值可以省略不输。 以上数据输入完后,点击菜单“文件另存为”,将输入的数据保存为平差易数据格式文件(格式内容详见附录A ): [STATION] (测站信息) B,10,8345.870900,5216.602100 A,10,7396.252000,5530.009000 C, 10,4817.605000,9341.482000 D, 10,4467.524300,8404.762400 2,00 3,00 4,00 [OBSER] (观测信息) A,B,,1000.0000 A,2,85.302110,1474.4440 C,4 C,D,244.183000,1000.0000 2,A 2,3,254.323220,1424.7170 3,2 3,4,131.043330,1749.3220 4,3 4,C,272.202020,1950.4120 上面[STATION] (测站点)是测站信息区中的数据,[OBSER] (照准点)是观测信息区中的数据。 水准实例 这是一条符合水准的测量数据和简图,A和B是已知高程点,2、3和4是待测的 目录 目录 (1) 观测误差 (2) 摘要: (2) 关键词: (2) 引言 (3) 1水准测量 (4) 1.1水准测量的原理 (4) 1.2水准网 (5) 2条件平差 (6) 2.1衡量精度的指标 (6) 2.2条件平差的原理 (8) 3水准网的平差 (14) 3.1必要观测与多余观测 (14) 3.2条件方程 (14) 3.3条件平差法方程式 (14) 3.4条件平差的精度评定 (15) 3.5水准网的条件平差 (18) 致谢 (20) 参考文献 (21) 观测误差 —由观测者、外界环境引起的偶然误差 学生: xxx 指导教师:xxx 摘要: 对一系列带有偶然误差的观测值,采用合理的的方法消除它们间的不符值,得出未知量的最可靠值;以及评定测量成果的精度。 关键词: 偶然误差;观测值;精度 引言 测量工作中,要确定地面点的空间位置,就必须进行高程测量,确定地面点的高程。几何水准测量是高程测量中最基本、最精密的一种方法。通过测量仪器,工具等任何手段获得的以数字形式表示的空间信息,即观测量。然而,测量是一个有变化的过程,受仪器、观测值、外界环境因素的影响,观测的结果与客观上存在的一个能反映其真正大小的数值,即真值(理论值),有一定的差异。可以说在测量中产生误差是不可避免的。所以,观测值不能准确得到,在测量上称这种差异为观测误差。根据其对观测结果影响的性质,可将误差分为系统误差和偶然误差两种。前者可以通过在观测过程中采取一定的措施和在观测结果中加入改正数,消除或减弱它的影响,使其达到忽略不计的程度。但是,观测结果中,不可避免地包含了后者,它是不可消除的,但可以选择较好的观测条件或采用适当的数据处理方法减弱它。现在我们要讨论的就是采用适当的数据处理方法来减弱其对水准测量中的影响。 前言 随着测绘科学技术的不断发展,在测量数据的处理中产生很多种平差的方法。附和导线近似平差程序是利用C#编程实现的,我们需要将导线网的已知数据信息按照特定的规则输入到.txt文本中,利用C#程序读取文本数据信息后,对其进行一系列的平差计算,最终获得平差后的结果,并以.txt文本的形式输出,这样就可为测量工作提供一定的参考。 平差程序的基本要求 平差程序的设计与其他程序设计相同,应满足一定要求。 1.程序逻辑结构简单,清晰易读,符合结构化程序设计要求,便于拓展; 2.运算速度快,占用内存小,内外存储之间的交换不宜过于频繁; 3.数学模型及计算方法正确且先进,计算结果精度高; 4.适用性强,便于移植,充分考虑各种可能形式,满足不同需求; 5.方便用户,操作简单,输出明了、齐全,人机交互良好。 上述要求,既体现现在平差程序的总体设计中,也贯穿于平差程序设计的各个环节中。 平差程序中的重要函数 (一)角度制与弧度制的相互转化 C#程序设计中,关于角度的计算以弧度制为单位,而在测量工作中我们通常以角度制记录数据。所以,在数据处理中,通常需要在角度制与弧度制之间进行相互转化。这里我们需要利用相关函数完成这两种功能。 1.角度化弧度函数: static public double DEG(double ang) { int fuhao = (int)(ang / Math.Abs(ang)); ang = Math.Abs(ang); int d = (int)ang; int m = ((int)(ang * 100)) - d * 100; double s = ang * 10000 - m * 100 - d * 10000; return ((d + m / 60.0 + s / 3600.0) * fuhao) / 180.0 * Math.PI; } 2.弧度化角度函数: static public double DMS(double ang) { ang += 1.0E-15;//加上一个小量,以保证进位 int fuhao = (int)(ang / Math.Abs(ang)); 计算方案的设置 一、导线类型: 1.闭、附合导线(图1) 2.无定向导线(图2) 3.支导线(图3) 4.特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有的导线,但不计算闭合差。而且该类型不需要填写未知点数目。当点击表格最后一行时自动添加一行,计算时删除后面的空行。 5.坐标导线。指使用全站仪直接观测坐标、高程的闭、附合导线。 6.单面单程水准测量记录计算。指仅进行单面读数且仅进行往测而无返测的水准测量记录计算。当数据中没有输入“中视”时可以用作五等、等外水准等的记录计算。当输入了“中视”时可以用作中平测量等的记录计算。 说明:除“单面单程水准测量记录计算”仅用于低等级的水准测量记录计算外,其它类型选项都可以进行平面及高程的平差计算,输入了平面数据则进行平面的平差,输入了高程数据则进行高程的平差,同时输入则同时平差。如果不需进行平面的平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。 二、概算 1.对方向、边长进行投影改化及边长的高程归化,也可以只选择其中的一项改正。 2.应选择相应的坐标系统,以及Y坐标是否包含500KM。选择了概算时,Y坐标不应包含带号。 三、等级与限差 1.在选择好导线类型后,再选择平面及高程的等级,以便根据《工程测量规范》自动填写限差等设置。如果填写的值不符合您所使用的规范,则再修改各项值的设置。比如现行的《公路勘测规范》的三级导线比《工程测量规范》的三级导线要求要低一些。 2.导线测量平差4.2及以前版本没有设置限差,打开4.2及以前版本时请注意重新设置限差。 四、近似平差与严密平差的选择及近似平差的方位角、边长是否反算 1.近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。 2.严密平差:按最小二乘法原理平差。 3.《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。当采用简化方法平差时,应以平差后坐标反算的角度和边长作为成果。 《城市测量规范》规定:四等以下平面控制网可采用近似平差法和按近似方法评定其精度。......采用近似平差方法的导线网,应根据平差后坐标反算的方位角与边长作为成果。 因此,严密平差适用于各种等级的控制网,而近似平差适用于较低等级。当采用近似平差时,应进行方位角、边长反算。 显示角度改正前的坐标闭合差:勾选此项后,程序在“平面计算表”备注栏内显示角度改正前的坐标闭合差,否则显示角度改正后的坐标增量闭合差。为了以示区别,角度改正前的坐标闭合差以Wx、Wy、Ws表示,角度改正后的坐标增量闭合差以fx、fy、fs表示。 五、近似平差设置 1.方位角、边长反算:根据近似平差后的坐标反算方位角、边长、角度等。反算后的方位角、边长、角度等是平差后的最终值,可以作为最终成果使用,否则仅为平差计算的中间结果,不应作为最终成果使用。反算与不反算表格形式是不一样的。注意:反算后,按最终的角度值平差易软件数据输入实例
水准网的条件平差
C#附和导线平差程序设计实习报告
导线测量平差教程
相关主题
文本预览