收稿日期:2007-04-11; 修回日期:2007-08-26
作者简介:李正平(1963—
),男,山东沂南人,山东临沂师范学院物理系副教授,复旦大学物理系访问学者,主要从事物理实验教学研究工作.线偏振光旋光角检测定位准确度的研究
李正平1,2,马世红2
(1.临沂师范学院物理系,山东临沂 276005;2.复旦大学物理系,上海 200433)
摘要:在线偏振光旋光实验中,对视觉检测定位进行了理论分析和实验研究,通过对各种条件下检测准确度的分析和实验验证,得出了最优准确度检测方法.同时,对使用光电技术进行检测定位与视觉检测差异进行了分析研究,指出了提高检测准确度的方法和途径.
关键词:韦伯-费希纳定律;视觉差;定位;准确度;光电检测
中图分类号:O 432.1 文献标识码:A 文章编号:100020712(2008)022*******
韦伯-费希纳定律[1]指出感觉器官的感觉与“相
对刺激”d R/R 成正比.因此在用视觉分辨线偏振光旋光的实验中,应该以光强变化率最大且为弱光下的检测点(此时的刺激量R 即为光强I )作为线偏振光的定位点,这时可获得最大检测准确度.当然在具体实验中,如何选取检测点才能获得最大检测准确度以及使用光电检测技术条件下,如何设计和选取合适技术参数,一直是实验者关心的问题.笔者就这些问题进行了理论分析和实验研究,提出了视觉检测和光电检测中韦伯-费希纳定律新的应用方法.
1 韦伯-费希纳定律及其在偏振旋光测量中
的应用
1.1 韦伯-费希纳定律[1,8]
1860年德国著名的生理学家韦伯(Weber E H )
和心理物理学家费希纳(Fechner G T )经研究得出:感觉的大小与刺激强度的对数成正比,即
S =K lg R
(1)
式中,S 表示感觉强度,R 为刺激强度,K 为韦伯常数.
在视觉分辨中,常用最小可觉差(jnd )法进行辨别或判断以及对定律的证明,对式(1)微分可得到感觉差d S :
d S =K
d R
R
(2)
式中,d R 为刺激强度差,d S 为感觉差.
可见进行感觉分辨时,在相同刺激强度下,刺激强度变化率越大,感觉就越明显;同时,由于人眼的生理特性,在刺激强度变化率相同的情况下,通常刺
激强度越小感觉差就越大.1.2 马吕斯定律[2] 在不考虑吸收和反射的条件下,强度为I 0的线偏振光通过检偏振器后,出射光的强度为
I =I 0cos 2
θ
(3)
式中,θ为检偏器的透振方向与入射偏振光的振动方向之间的夹角.1.3 线偏振光旋光实验中的视觉定位
在检测线偏振光或其旋光的振动方向时,根据马吕斯定律,在检偏器后观测出射光强的变化确定其偏振方位.实验时常用两种方法[3-5]测量:1)消光位置定位法;2)近消光位置半荫法
.
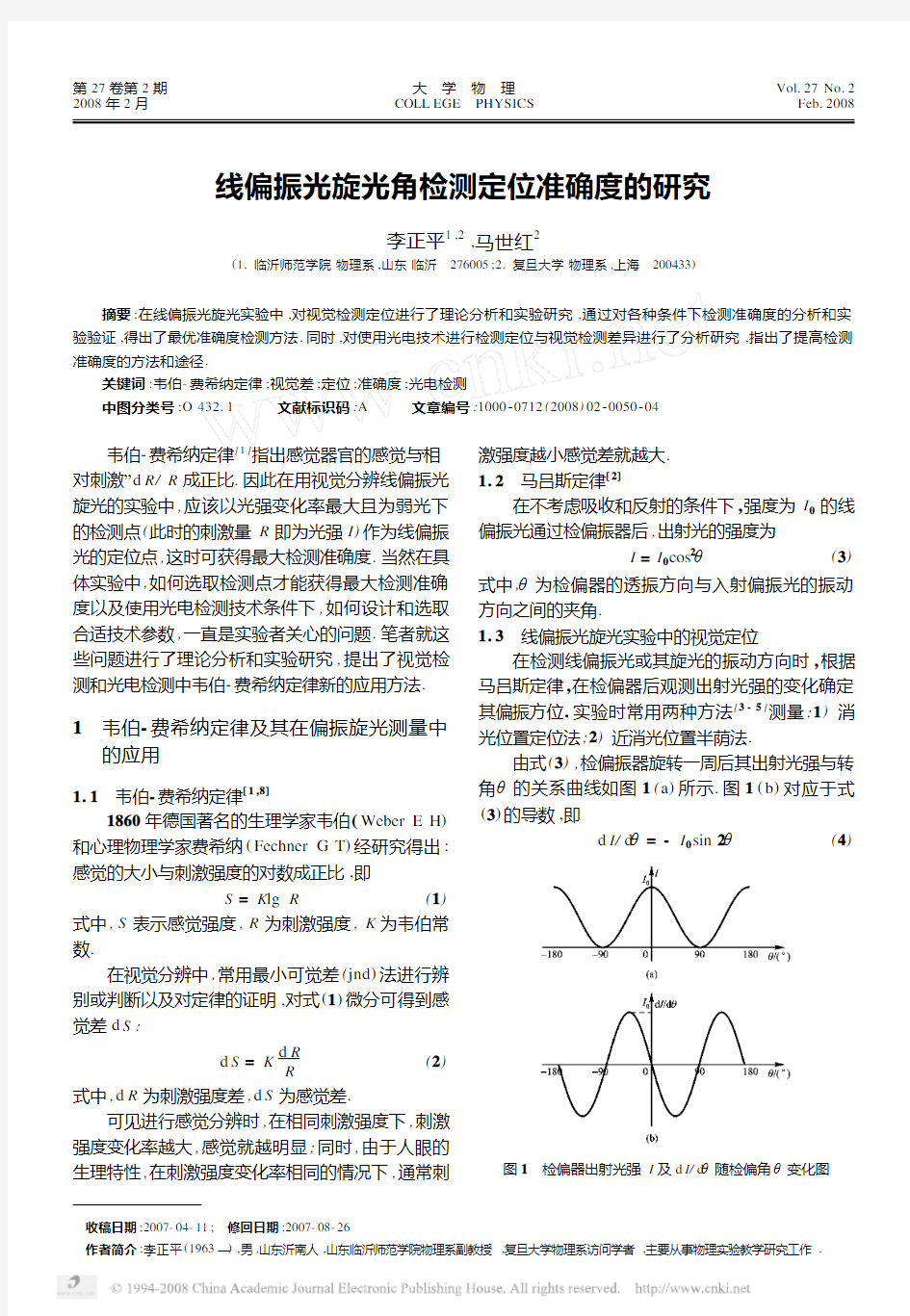
由式(3),检偏振器旋转一周后其出射光强与转角θ的关系曲线如图1(a )所示.图1(b )对应于式(3)的导数,即
d I/d θ=-I 0sin 2θ
(4)图1 检偏器出射光强I 及d I/d
θ随检偏角θ变化图第27卷第2期大 学 物 理Vol.27No.2
2008年2月COLL EGE PHYSICS Feb.2008
光学实验中,对应于韦伯-费希纳定律,刺激差
即光强差,所以感觉差为
d S =K d I
I
=-2K tan θd θ
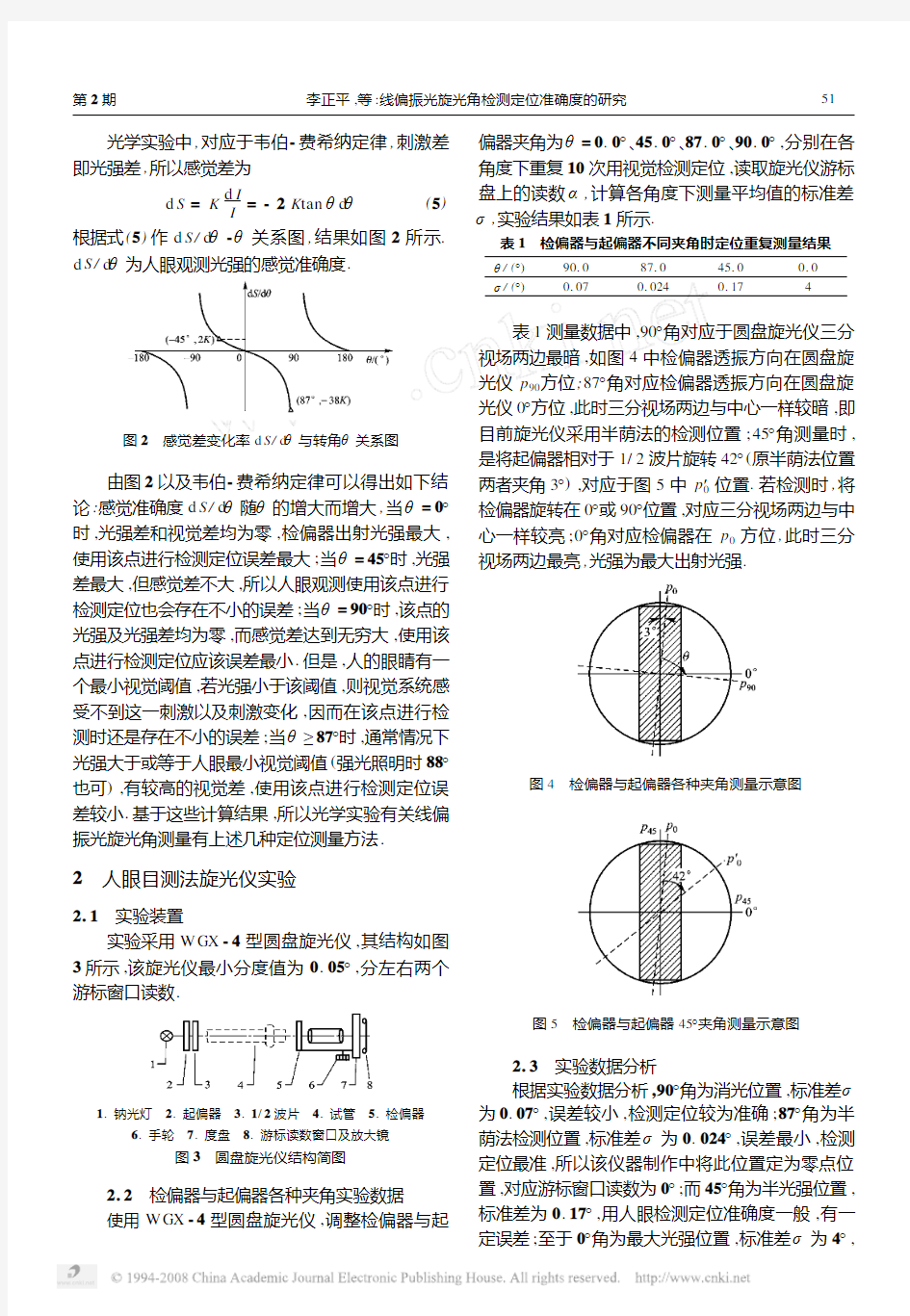
(5)根据式(5)作d S /d θ-θ关系图,结果如图2所示.
d S /d θ为人眼观测光强的感觉准确度
.
图2 感觉差变化率d S/d θ与转角θ关系图
由图2以及韦伯-费希纳定律可以得出如下结论:感觉准确度d S /d θ随θ的增大而增大,当θ=0°时,光强差和视觉差均为零,检偏器出射光强最大,使用该点进行检测定位误差最大;当θ=45°时,光强差最大,但感觉差不大,所以人眼观测使用该点进行检测定位也会存在不小的误差;当θ=90°时,该点的光强及光强差均为零,而感觉差达到无穷大,使用该点进行检测定位应该误差最小.但是,人的眼睛有一个最小视觉阈值,若光强小于该阈值,则视觉系统感受不到这一刺激以及刺激变化,因而在该点进行检测时还是存在不小的误差;当θ≥87°时,通常情况下光强大于或等于人眼最小视觉阈值(强光照明时88°也可),有较高的视觉差,使用该点进行检测定位误差较小.基于这些计算结果,所以光学实验有关线偏振光旋光角测量有上述几种定位测量方法.
2 人眼目测法旋光仪实验
2.1 实验装置
实验采用W GX -4型圆盘旋光仪,其结构如图
3所示,该旋光仪最小分度值为0.05°,分左右两个游标窗口读数
.
1.钠光灯
2.起偏器
3.1/2波片
4.试管
5.检偏器
6.手轮
7.度盘
8.游标读数窗口及放大镜
图3 圆盘旋光仪结构简图
2.2 检偏器与起偏器各种夹角实验数据
使用W GX -4型圆盘旋光仪,调整检偏器与起
偏器夹角为θ=0.0°、45.0°、87.0°、90.0°,分别在各
角度下重复10次用视觉检测定位,读取旋光仪游标盘上的读数α,计算各角度下测量平均值的标准差σ,实验结果如表1所示.
表1 检偏器与起偏器不同夹角时定位重复测量结果
θ/(°)90.087.045.00.0σ/(°
)0.07
0.024
0.17
4
表1测量数据中,90°角对应于圆盘旋光仪三分视场两边最暗,如图4中检偏器透振方向在圆盘旋光仪p 90方位;87°角对应检偏器透振方向在圆盘旋光仪0°方位,此时三分视场两边与中心一样较暗,即目前旋光仪采用半荫法的检测位置;45°角测量时,
是将起偏器相对于1/2波片旋转42°
(原半荫法位置两者夹角3°),对应于图5中p ′0位置.若检测时,将检偏器旋转在0°或90°位置,对应三分视场两边与中
心一样较亮;0°角对应检偏器在p
0方位,此时三分视场两边最亮,光强为最大出射光强.
图4 检偏器与起偏器各种夹角测量示意图
图5 检偏器与起偏器45°夹角测量示意图
2.3 实验数据分析
根据实验数据分析,90°角为消光位置,标准差σ
为0.07°,误差较小,检测定位较为准确;87°角为半荫法检测位置,标准差σ为0.024°,误差最小,检测定位最准,所以该仪器制作中将此位置定为零点位置,对应游标窗口读数为0°;而45°角为半光强位置,标准差为0.17°,用人眼检测定位准确度一般,有一定误差;至于0°角为最大光强位置,标准差σ为4°,
第2期 李正平,等:线偏振光旋光角检测定位准确度的研究51
误差最大,检测定位不准.
通过实验结果与理论分析比较得到结果如表2所示.
表2 检偏器与起偏器不同夹角θ时实验检测误差分析
θ/(°)光强光强差视觉差检测误差
0.0最大值I000最大
45.0I0/2最大值1较小2较大
87.0较小I0/365较小0.1较大38最小
90.000最大值∞较小
根据以上分析比较,半荫法是检测定位误差最小、准确度最高的方法,但是半荫法需要特别设置1/2波长片,如果实验条件不允许,或定位测量要求不高时,可采取偏离消光位置至最小阈值光强单边定位测量(θ=90°-θ0,其中θ0为最小阈值光强对应的检偏器偏离消光位置的转角),或测双边最小阈值取中点定位测量(θ=90°±θ0),这样可近似达到半荫法测量的最大准确度.
3 光电传感器检测定位问题
3.1 光电检测的特性分析
光电技术和计算机结合,应用于定位检测会大大提高测量的精度[6,7].笔者对应用于偏振光实验及旋光实验(包括法拉第磁致旋光、克尔电光效应、克尔磁光效应、量糖计、干涉衍射条纹检测等)的光电检测仪器进行实验和分析,发现很多仪器仍然采用视觉检测的定位思路,没有根据光电检测的特点进行设计,从而使检测准确度没有发挥到最大极限,其主要原因是光敏元器件如硅光电池在短路情况下的光照特性是线性的,即硅光电池的短路电流与入射光强(在光敏接收面不变的情况下)在一定范围内呈线性关系,而非视觉的对数关系,因此光敏器件的检测准确度只与光强差成正比,而不与光强成反比,故完全可以把检测点定位在最大光强差45°处.当然该处的光强较大,在进行前置放大时可通过调整基准电平的办法,或采用补偿法调零,既可做到很高的放大倍数,同时也有很高的准确度.
补偿法调零参考电路如图6、图7所示
.
3.2 光电检测准确度分析
设光电检测的准确度为M,则
M=d N
dθ
(6)
式中dθ为入射的线偏振光与检偏器的相对转角, d N为光电放大设备显示的光强变化值.
如果光电检测设备的光电转换系数为G,电放
图6 光敏电阻补偿法调零电路
图7 硅光电池补偿法调零电路
大系数为E,则
d N=EG d I(7)式中d I为光电检测设备当线偏振光与检偏器的相对转角为dθ时的输出光强变化值,即光强差.
将式(7)代入式(6)
得
M=EG
d I
dθ
(8)由式(8)可以看出当E、G相同的情况下,光电检测准确度与光强差成正比.由式(4)计算分析,45°处要比87°处准确度提高一个量级.
图8 检偏器与起偏器各种夹角测量示意图
3.3 光电传感器测量偏振光实验与分析
笔者在光电检测偏振光实验、电光效应、磁光效应中对此进行了验证,得到结果一致.表3列出了FD-OE-2型光偏振实验仪的实验数据.检偏器与起偏器各种夹角测量原理如图8所示,测量时起偏器透振方向在p0位置,检偏器分别放于p90、p87、p45、p0位置,观测在光功率计读数不变的情况下,检偏器游标度盘的读数α,重复测量,计算其标准差,其中检偏器采用分度值为0.02′的读数装置.
52
大 学 物 理 第27卷
表3 检偏器与起偏器不同夹角θ时实验
仪检偏器刻度盘的测量数据
α/(°)序号
θ/(°
)90.087.045.00.0
132°26′35°06′77°10′123°38′232°18′35°12′77°12′122°10′332°08′35°10′77°08′120°20′432°22′35°14′77°10′121°16′531°34′35°18′77°08′120°30′631°30′35°10′77°12′121°08′732°20′35°16′77°10′120°58′831°36′35°08′77°12′121°46′931°42′35°02′77°08′121°40′10
31°50′
35°10′
77°10′
121°02′
σ 22′ 5′ 2′ 57′
表3测量数据中σ为检偏器与起偏器夹角为θ
=0.0°、45.0°、87.0°、90.0°时光电检测定位读数α测量平均值的标准差.
结果与分析
1)在光电检测中,光强差最大的位置,如检偏器与偏振光夹角为45.0°的位置,检测定位误差是最小的.
2)由于45°位置光强较大,在仪器设计中,要保持较大的光电放大倍数,电路设计中须用调零补偿电路,会使设计略复杂一些.
4 结束语
长期以来人们对视觉检测中应该以消光位置进
行检测,还是偏离消光位置进行检测,存在理论上的
模糊,更无具体的实验验证.本文通过韦伯-费希纳定律以及详细的实验验证,得出了在消光位置检测
误差不是最小的,而需偏离2°~3°进行检测误差最
小.在光电检测中,消光位置的误差同样也不是最小的,而是在偏离45°时误差最小.这一研究结果可以为偏振光有关实验和仪器的设计提供重要依据,也可供其他物理实验参考.
参考文献:
[1] Fechner G T.Elemente der psychophysik [M ],New
Y ork :Holt ,Rinehart &Winston ,1966:7—9.[2] 姚启钧.光学教程[M ].北京:高等教育出版社,2002:
304—369.
[3] 袁长坤.物理量测量[M ].北京:科学出版社,2004:
242—247.
[4] 是度芳.基础物理实验[M ].武汉:湖北科学出版社,
2003:174—178.
[5] 沈元华,陆申龙.基础物理实验[M ].北京:高等教育出
版社,2003:256—261.
[6] 胡解生,向东,郭萍,等.光电等厚干涉实验仪[J ].大学
物理,2004,23(10):43—45.
[7] 李文成,谷晋骐,王涌萍.双光束干涉条纹间距的在线
测量[J ].大学物理,2003,22(8):28—30.
[8] [德]卫斯特法尔.物理实验[M ].王福山,译.上海:上
海科学技术出版社,1981:173—179.
Investigation on detection sensitivity of linearly
polarized rotatory angle
L I Zheng 2ping 1,2,MA Shi 2hong 2
(1.Department of Physics ,Linyi Teachers University ,Linyi ,Shandong 276005,China ;
2.Department of Physics ,Fudan University ,Shanghai 200433,China )
Abstract :It is analyzed theoretically and investigated experimentally for the vision detection and positioning in an experiment of linear polarization rotatory.Under various conditions ,the best method of sensitivity detec 2tion is suggested by means of detection sensitivity analysis and verification.Finally ,the investigation on differ 2ence between the detection positioning and vision using photoelectric technique are carried out and the new method and way of increasing detection sensitivity are pointed out.
K ey w ords :Weber -Fechner ’s law ;vision difference ;positioning ;sensitivity ;photoelectric detection
第2期 李正平,等:线偏振光旋光角检测定位准确度的研究
53
定位精度、重复定位精度的概念以及国家相关标准 许多人经常听到定位精度和重复定位精度的说法但却对它们的概念以及检测方法很模糊本文将阐明其概念并就给出国家标准GB/T 17421.2-2000等同于国际ISO230-21997---数控轴线的定位精度和重复定位精度的确定。GB/T 17421.2-2000 数控轴线的定位精度和重复定位精度的确定 1. 范围本标准规定了通过直接测量机床的单独轴线来检验和评定数控机床的定位精度和重复定位精度的方法。这种方法对直线运动和回转运动同样适用。本标准适用机床的型式检验验收检验比较检验定期检验也可用于机床的补偿调整检验。本标准不适用于需同时检验几个轴线的机床。 2. 定义和符号本标准采用以下定义和符号 2.1. 轴线行程在数字控制下运动部件沿轴线移动的最大直线行程或绕轴线回转的最大行程。 2.2. 测量行程用于采集数据的部分轴线行程。选择测量行程时应保证可以双向趋近第一个和最后一个目标位置。 2.3. 目标位置i 1 至m 运动部件编程要达到的位置。下标i表示沿轴线或绕轴线选择的目标位置中的特定位置。 2.4. 实际位置Piji 1 至mj 1 至n 运行部件第j次向第i个目标位置趋近时实际测得的到达位置。 2.5. 位置偏差Xij 运动部件到达的实际位置减去目标位置之差。Xij Pij Pi 2.6. 单向以相同的方向沿轴线或绕轴线趋近目标位置的一系列测量。符号↑表示从正方向趋近所得的参数符号↓表示从负方向趋近所得的参数。 2.7. 双向从两个方向沿线轴线或绕轴线趋近某目标位置的一系列测量所测得的参数。 2.8. 扩展不确定度定量地确定一个测量结果的区间该区间期望包含大部分的数值分布。 2.9. 覆盖因子为获得扩展不确定度而用标准不确定度倍率的一个数值因子。 2.10. 某一位置的单向平均位置偏差由n次单向趋近某一位置Pi所得的位置偏差的算术平均值。 2.11. 某一位置的双向平均位置偏差从两个方向趋近某一位置Pi所得的单向平均位置偏差 2.12. 某一位置的反向差值Bi 从两个方向趋近某一位置时两单向平均位置偏差之差。2.1 3. 轴线反向差值B 沿轴线或绕轴线的各个目标位置的反向差值的绝对值Bi中的最大值。 2.14. 轴线平均反向差值B 沿轴线或绕轴线的各个目标位置反向差值Bi的算术平均值。 2.15. 在某一位置的单向定位标准不确定度的估算值Si↑或Si↓ 通过对某一位置Pi的n次单向趋近所得获得的位置偏差标准不确定度的估算值。 2.16. 某一位置的单向重复定位精度Ri↑或Ri↓ 由某一位置Pi的单向位置偏差的扩展不确定度确定的范围覆盖因子为 2.18. 轴线单向重复定位精度R↑或R↓以及轴线双向重复定位精度R 沿轴线或绕轴线的任一位置Pi的重复定位精度的最大值。 2.19. 轴线单向定位系统偏差E↑或E↓ 沿轴线或绕轴线的任一位置Pi上单向趋近的单向平均位置偏差的最大值与最小值的代数差。 2.20. 轴线双向定位系统偏差E 沿轴线或绕轴线的任一位置Pi上双向趋近的单向平均位置差的最大值与最小值的代数差。 2.21. 轴线双向平均位置偏差M 沿轴线或绕轴线的任一位置Pi的双向平均位置偏差的最大值与最小值的代数差。
数控车床几何精度检测 1.床身导轨的直线度和平行度 ☆纵向导轨调平后,床身导轨在垂直平面内的直线度 检验工具:精密水平仪 检验方法:如0001 所示,水平仪沿Z 轴向放在溜板上,沿导轨全长等距离地在各位置上检验,记录水平仪的读数,并记入“报告要求”中的表 1 中,并用作图法计算出床身导轨在垂直平面内的直线度误差。 ☆横向导轨调平后,床身导轨的平行度 检验工具:精密水平仪 检验方法:如0002 所示,水平仪沿X 轴向放在溜板上,在导轨上移动溜板,记录水平仪读数,其读数最大值即为床身导轨的平行度误差。
2.溜板在水平面内移动的直线度 检验工具:指示器和检验棒,百分表和平尺 检验方法:如0003 所示,将直验棒顶在主轴和尾座顶尖上;再将百分表固定在溜板上,百分表水平触及验棒母线;全程移动溜板,调整尾座,使百分表在行程两端读数相等,检测溜板移动在水平面内的直线度误差。 3.尾座移动对溜板移动的平行度 ☆垂直平面内尾座移动对溜板移动的平行度 ☆水平面内尾座移动对溜板移动的平行度 检验工具:百分表 检验方法:如0004 所示,将尾座套筒伸出后,按正常工作状态锁紧,同时使尾座尽可能的靠近溜板,把安装在溜板上的第二个百分表相对于尾座套筒的端面调整为零;溜板移动时也要手动移动尾座直至第二个百分表的读数为零,使尾座与溜板相对距离保持不变。按此法使溜板和尾座全行程移动,只要第二个百分表的读数始终为零,则第一个百分表相应指示出平行度误差。或沿行程在每隔300mm 处记录第一个百分表读数,百分表读数的最大差值即为平行度误差。第一个指示器分别在图中ab 位置测量,误差单独计算。
4.主轴跳动 ☆主轴的轴向窜动 ☆主轴的轴肩支承面的跳动 检验工具:百分表和专用装置 检验方法:如0005 所示,用专用装置在主轴线上加力 F ( F 的值为消除轴向间隙的最小值),把百分表安装在机床固定部件上,然后使百分表测头沿主轴轴线分别触及专用装置的钢球和主轴轴肩支承面;旋转主轴,百分表读数最大差值即为主轴的轴向窜动误差和主轴轴肩支承面的跳动误差 5.主轴定心轴颈的径向跳动 检验工具:百分表 检验方法:如0006 所示,把百分表安装在机床固定部件上,使百分表测头垂直于主轴定心轴颈并触及主轴定心轴颈;旋转主轴,百分表读数最大差值即为主轴定心轴颈的径向跳动误差
数控机床精度的检测 论文关键词: 数控机床;几何精度;定位精度;切削精度;检测与注意事项。 论文摘要: 现代数控机床集合了电子计算机、伺服系统、自动控制系统、精密测量系统及新型机构等先进技术,能够加工形状复杂、精密、批量零件,并且具有加工精度高、生产效率高、适应性强等特点。随着我国制造业的快速发展,数控机床在机械制造业已得到广泛应用,且对数控机床的精度要求也越来越高。如何检测数控机床的精度,正成为各行业用户在验收与维护数控机床时非常关注的问题。机床的精度主要包括机床的几何精度、机床的定位精度和机床的切削精度。根据我在日常工作中所积累的经验,就这些精度的检测项目、检测方法及注意事项进行综合的说明: 检验目的:了解进行数控机床几何精度检测、加工精度检测常用的工具及其使用方法 检验要求:了解ISO标准、GB中常见的数控机床几何精度及加工精度检测项目标准数据,掌握数控机床几何精度、加工精度检测方法。 检验内容:机床调平、常见几何精度检测、常见加工精度检测 数控车床精度检测 1.床身导轨的直线度和平行度 检验工具:精密水平仪 检验方法:(1)水平仪沿Z 轴向放在溜板上,沿导轨全长等距离在各位置上检验,记录水平仪的读数,并计算出床身导轨在垂直平面内的直线度误差。(2)水平仪沿X 轴向放在溜板上,在导轨上移动溜板,记录水平仪读数,其读数最大值即为床身导轨的平行度误差。2.溜板在水平面内移动的直线度 检验工具:指示器和检验棒,百分表和平尺 检验方法:将直验棒顶在主轴和尾座顶尖上;再将百分表固定在溜板上,百分表水平触及验棒母线;全程移动溜板,调整尾座,使百分表在行程两端读数相等,检测溜板移动在水平面内的直线度误差。 3.主轴跳动 检验工具:百分表和专用装置 检验方法:用专用装置在主轴线上加力 F ( F 的值为消除轴向间隙的最小值),把百分表安装在机床固定部件上,然后使百分表测头沿主轴轴线分别触及专用装置的钢球和主轴轴肩支承面;旋转主轴,百分表读数最大差值即为主轴的轴向窜动误差和主轴轴肩支承面的跳动误差 4.主轴锥孔轴线的径向跳动 检验工具:百分表和验棒 检验方法:将检验棒插在主轴锥孔内,把百分表安装在机床固定部件上,使百分表测头垂直触及被测表面,旋转主轴,记录百分表的最大读数差值,在a、b 处分别测量。标记检棒与主轴的圆周方向的相对位置,取下检棒,同向分别旋转检棒90 度、180 度、270 度后重新插入主轴锥孔,在每个位置分别检测。取4次检测的平均值即为主轴锥孔轴线的径向跳动误差 5.主轴轴线(对溜板移动)的平行度 检验工具:百分表和验棒 检验方法:将检验棒插在主轴锥孔内,把百分表安装在溜板上,然后:(1)使百分表
【实验题目】偏振光的产生和检验【实验记录与数据处理】 1.线偏振光的获得与检验 1)器件光路示意图(2分): 3)贴图(3分):曲线(直角坐标)
2.椭圆偏振光的获得与检验 1)器件光路示意图(2分): 3)贴图(5分):15°和45°的曲线图(极坐标) 光强与检偏器角度的关系(Φ=15?)
光强与检偏器角度的关系(Φ=45?)3. 1/2波片的研究 1)器件光路示意图(2分): 3)结论(2分):关系: 根据数据可得,在误差允许的范围内,△θ=2△Φ。 4.玻璃起偏与Brewster角的测定 1)器件光路示意图(2分):
2)Brewster 角p i 的测量记录(1分) 3)玻璃的折射率(3分)。 ==p i n n tan 0 1.000277*?8.51tan 玻璃折射率为=n 1.271125 【结论与讨论】 1.由实验一可得,在振动方向与透视轴夹角从90°减少至0°过程中,透视光强度逐渐由零增至最大值,与马吕斯定律I=I o cos θ相符合。 2.由实验二可得,当入射光与玻片夹角β= 0°,透过检偏器的光强最小,可知透过1/4玻片得到的是沿玻片慢轴的线偏振光;当β=15°,旋转检偏器一周后,得到的光强呈周期性变化,且最小值与最大值差值较大,光强最大值小于实验一中线偏振光的光强,再根据θ~I 曲线图即可知透过1/4玻片得到的是椭圆偏振光;当β=45°,旋转检偏器一周后,发现得到的光强变化不大,且光强大小界于β=15°时椭圆偏振光的光强最大值和最小值之间,再根据θ~I 曲线图即可知透过1/4玻片得到的是圆偏振光。 3.由实验三可得,线偏振光经过1/2玻片后仍为线偏振光,振动方向旋转了2θ(θ为入射光的偏振方向与玻片慢轴方向的夹角)。 4.实验四产生较大误差,误差原因为由于光线变化较小,且很难做到消光。故人为判断的影响较大。 前三个实验误差产生的原因主要来源于调节玻片和检偏器时对旋转角度的读数不能十分精准。 【课后问题】(5分) 讨论:如何利用波片与偏振光片判别圆偏振光与自然光? 答:1.已知圆偏振光经过1/4玻片后形成线偏振光,而自然光经过1/4玻片后仍为自然光,故可以用1/4玻片进行区分。 2.让光束透过1/4玻片+偏振片,旋转偏振片,透射光发生变化的为圆偏振光,透射光不发生变化的为自然光。故可用玻片+偏振片进行区分。 报告成绩(满分30分):??????????? 指导教师签名:???????????????? 日期:?????????????????
数控机床精度检测 数控机床的高精度最终是要靠机床本身的精度来保证,数控机床精度包括几何精度和切削精度。另一方面,数控机床各项性能的好坏及数控功能能否正常发挥将直接影响到机床的正常使用。因此,数控机床精度检验对初始使用的数控机床及维修调整后机床的技术指标恢复是很重要的。 1、检验所用的工具 1.1、水平仪 水平:0.04mm/1000mm 扭曲:0.02mm/1000mm 水平仪的使用和读数 水平仪是用于检查各种机床及其它机械设备导轨的直线度、平面度和设备安装的水平性、垂直性。 使用方法: 测量时使水平仪工作面紧贴在被测表面,待气泡完全静止后方可读数。水平仪的分度值是以一米为基长的倾斜值,如需测量长度为L的实际倾斜值可以通过下式进行计算: 实际倾斜值=分度值×L×偏差格数
水平仪的读数:水平仪读数的符号,习惯上规定:气泡移动方向和水平移动方向相同时读数为正值,相反时为负值。 1.2、千分表
1.3、莫氏检验棒
2、检验内容 2.1、相关标准(例) 加工中心检验条件第2部分:立式加工中心几何精度检验JB/T8771.2-1998 加工中心检验条件第7部分:精加工试件精度检验JB/T8771.7-1998 加工中心检验条件第4部分:线性和回转轴线的定位精度和重复定位精度检验JB/T8771.4-1998 机床检验通则第2部分:数控轴线的定位精度和重复定位精度的确定JB/T17421.2-2000 加工中心技术条件JB/T8801-1998 2.2、检验内容 精度检验内容主要包括数控机床的几何精度、定位精度和切削精度。 2.2.1、数控机床几何精度的检测 机床的几何精度是指机床某些基础零件本身的几何形状精度、相互位置的几何精度及其相对运动的几何精度。机床的几何精度是综合反映该设备的关键机械零部件和组装后几何形状误差。数控机床的基本性能检验与普通机床的检验方法差不多,使用的检测工具和方法也相似,每一项要独立检验,但要求更高。所使用的检测工具精度必须比所检测的精度高一级。其检测项目主要有: 直线度 一条线在一个平面或空间内的直线度,如数控卧式车床床身导轨的直线度。 部件的直线度,如数控升降台铣床工作台纵向基准T形槽的直线度。 运动的直线度,如立式加工中心X轴轴线运动的直线度。 平面度(如立式加工中心工作台面的平面度) 测量方法有:平板法、平板和指示器法、平尺法、精密水平仪法和光学法。 平行度、等距度、重合度 线和面的平行度,如数控卧式车床顶尖轴线对主刀架溜板移动的平行度。 运动的平行度,如立式加工中心工作台面和X轴轴线间的平行度。 等距度,如立式加工中心定位孔与工作台回转轴线的等距度。 同轴度或重合度,如数控卧式车床工具孔轴线与主轴轴线的重合度。 垂直度 直线和平面的垂直度,如立式加工中心主轴轴线和X轴轴线运动间的垂直度; 运动的垂直度,如立式加工中心Z轴轴线和X轴轴线运动间的垂直度。 旋转 径向跳动,如数控卧式车床或主轴定位孔的径向跳动。 周期性轴向窜动,如数控卧式车床主轴的周期性轴向窜动。 端面跳动,如数控卧式车床主轴的卡判定位端面的跳动。 2.2.2、机床的定位精度检验 数控机床的定位精度是测量机床各坐标轴在数控系统控制下所能达到的位置精度。根据实测的定位精度数值判断机床是否合格。其内容有:
光学设计性实验论文
偏振光特性的研究 摘要: 实验目的: (一)学习用光电转换的方法测定相对光强, 验证马吕斯定律。 (二)研究1/4波片的光学特性 (三)研究半导体激光器的偏振特性(测出其偏振度) (四)研究物质的旋光特性 (五)观察石英晶体的旋光特性和测量旋光度 (六)观察旋光色散,并解释现象 实验要求: (一)掌握各种偏振光的特性。 (二)学会辨别各种偏振光。 (三)了解偏振光干涉和双折射现象 关键词: 偏振、马吕斯定律、1/4波片、偏振特性、偏振度、旋光特性、旋光色散。 引言: 光的干涉和衍射现象揭示了光的波动性质,而光的偏振现象进一步验证了光波是横波。我们研究偏振现象不仅可以认识光的电磁波性质,而且可以对光的传播规律有许多新的认识。 实验原理: 1.偏振光的种类 光是电磁波,它的电矢量E和磁矢量H相互垂直,且又垂直于光的传播方向.通常用电矢量代表光矢量,并将光矢量和光的传播方向所构成的平面称为光的振动面.按光矢量的不同振动状态,可以把光分为五种偏振态:如光矢量沿着一个固定方向振动,称为线偏振光或平面偏振光;如在垂直于传播方向的平面内,光矢量的方向是任意的,且各个方向的振幅相等,则称为自然光;如果有的方向光矢量的振幅较大,有的方向振幅较小,则称为部分偏振光;如果光
矢量的大小和方向随时间作周期性的变化,且光矢量的末端在垂直于光传播方向的平面内的轨迹是圆或椭圆,则分别称为圆偏振光或椭圆偏振光. 能使自然光变成偏振光的装置或器件,称为起偏器;用来检验偏振光的装置或器件,称为检偏器. 2.线偏振光的产生 (1)反射和折射产生偏振 根据布儒斯特定律,当自然光以 n i b arctan =的入射角从空气或真空入射至折射率为n 的介质 表面上时,其反射光为完全的线偏振光,振动面垂直于入射面,而透射光为部分偏振光,b i 称 为布儒斯特角. 如果自然光以b i 入射到一叠平行玻璃片堆上,则经过多次反射和折射最后从玻璃片堆透射 出来的光也接近于线偏振光.玻璃片的数目越多,透射光的偏振度越高. (2)偏振片 它是利用某些有机化合物晶体的“二向色性”制成的.当自然光通过这种偏振片后,光矢量垂直于偏振片透振方向的分量几乎完全被吸收,光矢量平行于透振方向的分量几乎完全通过,因此透射光基本上为线偏振光. (3)双折射产生偏振 当自然光入射到某些双折射晶体(如方解石、石英等)时,经晶体的双折射所产生的寻常光(o 光)和非常光(e 光)都是线偏振光. 3.波晶片 波晶片简称波片,它通常是一块光轴平行于表面的单轴晶片,一束平面偏振光垂直入射到波晶片后,便分解为振动方向与光轴方向平行的e 光和与光轴方向垂直的o 光两部分(如图1所示).这两种光在晶体内的传播方向虽然一致,但它们在晶体内传播的速度却不相同(为么?).于 是,e 光和o 光通过波晶片后就产生固定的相位差δ, 即 l n n o e )(2-= λ π δ
偏振光学实验完整实验报告 工物53 李哲 2015011783 16号 1.实验目的: (1)理解偏振光的基本概念,在概念以及原理上了解线偏振光,圆偏振光以及椭圆偏振光,并了解偏振光的起偏与检偏方法。以及线偏振光具有的一些性质。 (2)学习偏振片与玻片的工作原理。 2.实验原理: (1)光波偏振态的描述: · 单色偏振光可以分解成两个偏振方向垂直的线偏振光的叠加: t a E X ωcos 1=与()δω+=t a E Y cos 1(其中δ是两个偏振方向分量的相位延迟,21,a a 为两个光的振幅),由其中的δ,,21a a 就可以确定这个线偏振光的性质。 πδ=或0=δ就为线偏振光,2 ,21π δ==a a 为圆偏振光(就是光矢量的顶点绕 其中点做圆周运动,依然是偏振光),而一般情况下是椭圆偏振光。 · 上述式子通常描述的是椭圆偏振光,而本实验通过测量椭圆的长轴方位角ψ以及椭圆的短半轴与长半轴的比值对于椭圆偏振光进行描述。其计算式是: ()δβcos 2tan arctan 2 1 ?=ψ () 12sin sin 112222-?-+=βδa b 而对于实验中的椭圆偏振光而言,其光强在短轴对应的方向最小,在长轴的对应方向最大,所以可以通过使这个椭圆偏振光通过一个偏振片,并调整偏振片的透射轴方位,测量其最大最小值,就可以知道其长轴短轴的比值。又由于光强与振幅的平方成正比,所以测得的光强的比值是长轴短轴之比的平方。 (2)偏振片: · 理想偏振片:只有电矢量振动方向与透射轴平行方向的光波分量才能通过偏振片。 · 实验中的偏振片不是理想化的,并不能达到上述的效果,当入射光波的振动方向与透射轴平行时,其透射率不能达到1,当垂直于透射轴时,其透射率不是0。所以对于偏振片有主透射率以及消光比两个量进行描述。 · 主透射率21T T ,指沿透射轴或消光轴方向振动光的光强透射率。两者的比值
数控机床定位精度检测的方式 目前,由于数控系统功能越来越多,对每个坐喷射器标运动精度的系统误差如螺距积累误差、反向间隙误差等都可以进行系统补偿,只有随机误差没法补偿,而重复定位精度正是反映了进给驱动机构的综合随机误差,它无法用数控系统补偿来修正,当发现它超差时,只有对进给传动链进行精调修正。因此,如果允许对机床进行选择,则应选择重复定位精度高的机床为好。 1.直线运动定位精度检测 直线运动定位精度一般都在机床和工作台空载条件下进行。按国家标准和国际标准化组织的规定(ISO标准),对数控机床的检测,应以激光测量为准。在没有激光干涉仪的情况下,对于一般用户来说也可以用标准刻度尺,配以光学读数显微镜进行比较测量。但是,测量仪器精度必须比被测的精度高1~2个等级。 为了反映出多次定位中的全部误差,ISO标准规定每一个定位点按五次测量数据算平均值和散差-3散差带构成的定位点散差带。 2.直线运动重复定位精度检测 检测用的仪器与检测定位精度所用的相同。一般检测方法是在靠近各坐标行程中点及两端的任意三个位置进行测量,每个位置用快速移动定位,在凯威凯达相同条件下重复7次定位,测出停止位置数值并求出读数最大差值。以三个位置中最大一个差值的二分之一,附上正负符号,作为该坐标的重复定位精度,它是反映轴运动精度稳定性的最基本指标。 3.直线运动的原点返回精度检测 原点返回精度,实质上是该坐标轴上一个特殊点的重复定位精度,因此它的检测方法完全与重复定位精度相同。 4.直线运动的反向误差检测 直线运动的反向误差,也叫失动量,它包括该坐标轴进给传动链上驱动部位(如伺服电动机、伺趿液压马达和步进电动机等)的反向死区,各机械运动传动副的反向间隙和弹性变形等误差的综合反映。误差越大,则定位精度和重复定位精度也越低。 反向误差的检测方法是在所测坐标轴的行程内,预先向正向或反向移动一个距离并以此停止位置为基准,再在同一方向给予一定移动指令值,使之移动一段距离,然后再往相反方向移动相同的距离,测量停止位置与基准位置之差。在靠近行程的中点及两端的三个位置分别进行多次测定(一般为7次),求出各个位置上的平均值,以所得平均值中的最大值为反向误差值。
实验1. 验证马吕斯定律 实验原理:某些双折射晶体对于光振动垂直于光轴的线偏振 光有强烈吸收,而对于光振动平行于光轴的线偏振光吸收很少(吸 收o 光,通过e 光),这种对线偏振光的强烈的选择吸收性质,叫 做二向色性。具有二向色性的晶体叫做偏振片。 偏振片可作为起偏器。自然光通过偏振片后,变为振动面平行 于偏振片光轴(透振方向),强度为自然光一半的线偏振光。如图1、图2所示: 图1中靠近光源的偏振片1P 为起偏器,设经过1P 后线偏振光 振幅为0A (图2所示),光强为I 0。2P 与1P 夹角为θ,因此经2P 后 的线偏振光振幅为θcos 0A A =,光强为θθ20220cos cos I A I ==, 此式为马吕斯定律。 实验数据及图形: P 1 P 2 线偏光 单色自然光 线偏光 图1 P 1 P 2 A 0 A 0cos θ θ 图2
从图形中可以看出符合余弦定理,数据正确。 实验2.半波片,1/4波片作用 实验原理:偏振光垂直通过波片以后,按其振动方向(或振 动面)分解为寻常光(o 光)和非常光(e 光)。它们具有相同的 振动频率和固定的相位差(同波晶片的厚度成正比),若将它们投 影到同一方向,就能满足相干条件,实现偏振光的干涉。 分振动面的干涉装置如图3所示,M 和N 是两个偏振片,C 是 波片,单色自然光通过M 变成线偏振光,线偏振光在波片C 中分 解为o 光和e 光,最后投影在N 上,形成干涉。 考虑特殊情况,当M ⊥N 时,即两个偏振片的透振方向垂直时,出射光强为:)cos 1)(2(sin 420δθ-= ⊥I I ;当M ∥N 时,即两个偏振片的透振方向平行时,出射光强为:M N 图3 分振动面干涉装置 I 0 波片 偏振片 偏振片 单色自然光
数控机床各数控轴重复定位精度和反向间隙 一、重复定位精度 1、定义 重复定位精度是指机床滑板或大拖板在一定距离范围内(一般为200-300mm)往复运动7次千分表或激光干涉仪检测的精度。取这7次的最大差值。 2、影响因素 重复定位精度反映了伺服系统特性、进给系统的间隙与刚性以及摩擦特性等综合误差。一般情况下,重复定位精度是呈正态分布的偶然性误差,它影响一批零件加工的一致性,是一个非常重要的精度指标。它是影响机器能力指数CMK,工序能力指数CPK的重要因素。 3、相关标准 GB/T18400.4-2010 与ISO标准相当。300毫米长度上±0.0035 JIS 日本标准 DIN 德国标准 二、重复定位精度和定位精度的区别。 定位精度指的是数控轴实际到达的位置和数控系统要求到达的位置误差。比如要求一个轴走100 mm ,结果实际上它走了100.01 多出来的0.01 就是定位精度。 重复定位指的是同一个位置多次定位过去产生的误差。比如要求一个轴走100 mm 结果第一次实际上他走了100.01 重复一次同样的动作他走了99.99 这之间的误差0.02 就是重复定位精度。 通常情况重复定位精度比定位精度要高的多。 单件生产(比如模具制造)要求机床具有较高的定位精度,大批量生产要求机床具有较高的重复定位精度 三、重复定位精度的检测方法。 有两种,一种使用激光干涉仪,一种使用千分表。 介绍千分表检测重复定位精度。
1、选取数控轴经常使用的一段长度(200~300)毫米。 2、由作业指导员按下列要求编写一段小程序: 1)设定坐标轴的起点 2)坐标轴以工进速度(300米/分)往前走200或300毫米。 3)停住3秒。(便于观察千分表) 4)返回起点 5)重复上述步骤共七次。 程序如下:(以X 轴为例) G91 X0 G01 X300. F300 G04 X3. G01 X0 M99 3、作业指导员运行先单节运行小程序,确认程序无误。 4、保全工在停止的位置安装好千分表,并将千分表置零。 5、回到程序起点。 6、自动运行小程序,在暂停时观察百分表的度数并做好记录。 7、7次读数的最大差值即为该轴的重复定位精度。 四、重复定位误差超差处理对策: 1、当超差不大时如 0.02/300,可用激光干涉仪自带的软件对数控系统进行补偿。 当超差较大,应进一步确认是伺服系统问题、机械间隙、刚性问题、机械阻力(发卡)问题,做出相应的对策。 五、坐标轴的综合反向间隙 (背隙)(静态反向间隙) 1、通俗地讲就是伺服电机正传后变换成反转的时候,在一定的角度内,尽管电机转动,但是各传动链还要等间隙消除(受力一侧的)以后才能带动工作台运动,这个间隙就是综合反向间隙。这个间隙是一个综合值, 它 反应了丝杠螺
偏振光的应用 ————XXX 摘要: 名称与定义 横波 纵波 偏振原理 自然光 偏振光应用: 1、汽车车灯; 2、观看立体电影; 3、生物的生理机能与偏振光; 4、LCD液晶屏; 偏振光红外偏振光在医疗范围的应用: 5、红外偏振光治疗的特点: 产生 特性 定义:光波的光矢量的方向不变,只是其大小随相位变化的光。 偏振光,光学名词。光是一种电磁波,电磁波是横波。而振动方向和光波前进方向构成的平面叫做振动面,光的振动面只限于某一固定方向的,叫做平面偏振光或线偏振光。 横波 光是一种电磁波,是由与传播方向垂直的电场和磁场交替转换的振动形成的。这种振动方向与传播方向垂直的波我们称之为横波。 纵波 声波是靠空气或别的媒质前后压缩振动传播的,它的振动方向与传播相同,这类波我们称之为纵波。
偏振原理: 通常光源发出的光,它的振动面不只限于一个固定方向而是在各个方向上均匀分布的。这种光叫做自然光。光的偏振性是光的横波性的最直接,最有力的证据,光的偏振现象可以借助于实验装置进行观察,P1、P2是两块同样的偏振片。通过一片偏振片p1直接观察自然光(如灯光或阳光),透过偏振片的光虽然变成了偏振光,但由于人的眼睛没有辨别偏振光的能力,故无法察觉。如果我们把偏振片P1的方位固定,而把偏振片P2缓慢地转动,就可发现透射光的强度随着P2转动而出现周期性的变化,而且每转过90°就会重复出现发光强度从最大逐渐减弱到最暗;继续转动P2则光强又从接近于零逐渐增强到最大。由此可知,通过P1的透射光与原来的入射光性质是有所不同的,这说明经P1的透射光的振动对传播方向不具有对称性。自然光经过偏振片后,改变成为具有一定振动方向的光。这是由于偏振片中存在着某种特征性的方向,叫做偏振化方向,偏振片只允许平行于偏振化方向的振动通过,同时吸收垂直于该方向振动的光。通过偏振片的透射光,它的振动限制在某一振动方向上,我们把第一个偏振片P1叫做“起偏器”,它的作用是把自然光变成偏振光,但是人的眼睛不能辨别偏振光。必须依靠第二片偏振片P2去检 偏振光原理 查。旋转P2,当它的偏振化方向与偏振光的偏振面平行时,偏振光可顺利通过,这时在P2的后面有较亮的光。当P2的偏振方向与偏振光的偏振面垂直时,偏振光不能通过,在P2后面也变暗。第二个偏振片帮助我们辨别出偏振光,因此它也称为“检偏器”。光是一种电磁波,电磁波是横波。而振动方向和光波前进方向构成的平面叫做振动面,光的振动面只限于某一固定方向的,叫做平面偏振光或线偏振光。 自然光 光波是横波,即光波矢量的振动方向垂直于光的传播方向。通常,光源发出的光波,其光波矢量的振动在垂直于光的传播方向上作无规则取向,但统计平均来说,在空间所有可能的方向上,光波矢量的分布可看 偏振光 作是机会均等的,它们的总和与光的传播方向是对称的,即光矢量具有轴对称性、均匀分布、各方向振动的振幅相同,这种光就称为自然光。 偏振光 偏振光是指光矢量的振动方向不变,或具有某种规则地变化的光波。按照其性质,偏振
实验十一 偏振光的产生和检验 光的干涉和衍射实验证明了光的波动性质。本实验将进一步说明光是横波而不是纵波,即其E 和H 的振动方向是垂直于光的传播方向的。光的偏振性证明了光是横波,人们通过对光的偏振性质的研究,更深刻地认识了光的传播规律和光与物质的相互作用规律。目前偏振光的应用已遍及于工农业、医学、国防等部门。利用偏振光装置的各种精密仪器,已为科研、工程设计、生产技术的检验等,提供了极有价值的方法。 一、实验目的 1、观察光的偏振现象,加深对光波传播规律的认识。 2、掌握产生和检验偏振光的原理和方法。 二、实验原理 1、偏振光的概念 光的波动的形式在空间传播属于电磁波,它的电矢量E 与磁矢量H 相互垂直。E 和H 均垂直于光的传播方向,故光波是横波。 实验证明光效应主要由电场引起,所以电矢量E 的方向定为光的振动方向。 自然光源(如日光,各种照明灯等)发射的光是由构成这个光源的大量分子或原子发出的光波的合成。这些分子或原子的热运动和辐射是随机的,它们所发射的光振动,出现在各个方向的几率相等,这样的光叫做自然光。 自然光经过媒质的反射、折射或者吸收后,在某一方向上振动比另外方向上强,这种光称为部分偏振光。如果光振动始终被限制在某一确定的平面内,则称为平面偏振光,也称为线偏振光或完全偏振光。偏振光电矢量E 的端点在垂直于传播方向的平面内运动轨迹是一圆周的,称为圆偏振光,是一椭圆的则称为椭圆偏振光。 2、获得线偏振光的方法 自然光变成偏振光称作起偏,可以起偏的器件分为透射和反射2种形式。 (1) 反透射式起偏器 自然光在两种媒质的界面处反射和折射,当入射角b φ满足12tan /b n n φ=时, 反射光成为振动 方向垂直于入射面的线偏振光,这个规律称布儒斯特定律,b φ
文章编号:1001-2265(2006)11-0060-03 收稿日期:2006-03-15;修回日期:2006-06-19 *基金项目:浙江省科技计划项目(2005E10049) 作者简介:曹永洁(1982)),男,浙江台州人,浙江大学机械制造及其自动化专业硕士研究生,主要研究方向为数控机床误差检测技术相关研究, (E -m ail)donall ove @163.co m 。 数控机床定位精度检测方法比较 * 曹永洁1,2 ,傅建中 1 (1.浙江大学现代制造工程研究所,杭州 310027;2.上海工程技术大学高等职业技术学院,上海 200437) 摘要:评定机床性能的一项重要指标是机床的定位精度大小。文章介绍了两种常用的数控机床定位误差测量方法:一维球列法和激光干涉仪测量法的原理。在分析比较了两种方法的特点后,得出一维球列法在测量机床定位误差时的一些不足。同时,通过对一台数控铣床的测量后,发现激光干涉仪测量法更适合于机床定位精度的快速评定。 关键词:数控机床;定位精度;检测;激光干涉仪中图分类号:TP206+.1 文献标识码:A C o m par ison of L i n ear Positioning A ccuracy M easure m entM ethods i n M achine Tools C AO Yong -jie 1,2 ,F U Ji a n -zhong 1 (1.Depart m ent o fm echan ica lEng i n eeri n g ,Zhejiang U niversity ,H angzhou ,310027Ch i n a ;2.Shangha iUn-i versity of Eng ineeri n g Sc ience Shangha i200437,China)Abst ract :Linear positi o ning accuracy is a sign ificant para m eter i n accessing m ach i n e too ls capability .This pa -per presents t h e pri n ciple o f positi o ning errorsm easure m entm ethods by usi n g 1-D ball array and laser i n terfer -o m eter .A fter characteristic co mparison o f t h is t w o m ethods ,there r 'e so m e deficiency in the 1-D ball array .M ean -w hile ,w e found that t h e latter one is m ore su itable for m easuring m ach i n e too ls li n ear position i n g accuracy after i n specti n g a vertica lm illing m achi n e by usi n g the laser i n terfero m eter . K ey w ords :m ach i n e too ls ;positi o ning accuracy ;m easure m en;t laser i n terfero m eter 0 概述 数控机床精度是影响被加工工件尺寸精度的一个直接原因,提高工件加工精度,首先要提高机床精度,影响数控机床精度的主要因素为机床零部件和结构的几何误差,工件的最终加工精度是由机床刀具与工件之间的相对位移误差决定的[1]。定位精度是指数控工作台部件在要求的终点所达到的实际位置的精度,实际位置与理想位置之间的误差称为定位误差。它包括伺服系统、检测系统、工作台进给系统的误差和工作台导轨的几何误差,它影响加工零件的位置精度。数控机床的定位精度,是评定机床性能的一项重要指标。 在机床几何误差检测时,按照检测设备的结构特点和工作原理,可以把误差检测方法分为两类:第一类是接触式误差测量方法,主要有一维球列法、球柄仪法(DBB )等。经过误差参数辨识后,这类检测方法可以直接测量各个误差元,测量精度高,操作简便,设备成 本低,但该类方法在测量时,由于检测设备与机床相接触,在检测过程中带入了接触变形和磨损等误差。第二类是非接触式误差测量方法,主要有正交光栅检测及分离法、激光干涉测量法等。这类检测方法测量精度高,实时性强,检测速度快,操作界面友好,软件处理系统功能强大,但检测的周期相对较长。本文将分别介绍两类方法的代表:一维球列法和激光干涉仪法[2-5]。 1 一维球列定位误差测量原理 一维球列的结构如图1所示,在刚度很大的杆上,镗一系列尺寸相同的定位孔,在上面粘接一些尺寸相同、球度误差很小的钢球,就构成了一维球列。装在主轴上的三维测头在三个互相垂直方向上同时瞄准球心,以获得三维测头感受球心的位置,即为该球心的测量值。机床沿X 轴运动,三维测头依次测量杆上所有经过高精度激光干涉比较仪标定的钢球,将球心距的 #控制与检测# 组合机床与自动化加工技术
分类号密级 U D C 编号 本科毕业论文(设计) 题目偏振光检测及其研究 系别继续教育学院 专业名称光机电一体化工程 年级 2007级 姓名喻磊 学号 017607203658 指导教师姓名刘祥彪 二0一0年十一月
摘要 电磁波理论,光是横波,它的振动方向和光的传播方向垂直。光矢量在垂直于波线的平面作二维振动,光矢量的振动方式,叫做光波的偏振态。光矢量在一条直线上作简谐振动,叫线偏振光。如果光矢量的矢头的轨迹是椭圆(或圆),这种光叫椭圆偏振光。其次熟悉偏振光的物理特性及偏振光在各向异向性介质中有很多特殊的性质,比如常见的包括:双折射,眩光效应,场致双折射效应等。通过用数学表达式和矩阵对偏振光进行了详细的理论描述。在此基础上设计了几种产生完全偏振光(线偏振光.椭圆偏振光.圆偏振光)的方案,说明了设计原理并行方案选择。最简单的分析工具就是偏振片,通过两个偏振片,一个用来起偏,一个用来检偏和一个测量偏振面旋转方向和方向的功率计。提出了测定偏振态的一些方法,重点是用琼斯矢量表示的偏振态的参数测定方法,偏振光和椭圆偏振光的测量。 最后利用偏振光实验装置,完成了偏振光的综合实验。根据方案设计实验光路,在实验中得到了波形和数据,验证了设计方法的正确性。 关键词:偏振片;波片,位相位移;双折射;波晶片
Abstract The electromagnetic wave theories, only secondary wave, the dissemination direction perpendicularity of its vibration direction and lights.The light vector makes the two vibration in the flat surface of a line at the perpendicularity, the vibration method of the wide vector, be called the light wave to be partial to flap the 态.The light vector cares a straight line up make JIAN3 XIE2 vibration, call line be partial to flap the light.If the track of the head of the light vector is oval( or circle), this kind of light call oval be partial to flap the light.Acquaint with to be partial to the physics characteristic of flap the light and be partial to flap the light the next in order to have a lot of special property 〉s to include for example and familiarly in eachly to difference toward sex lie quality:The double refract, the dizzled light effect, field with the result that the double refracts effect etc..Pass to use mathematics expression type and matrix to flap the light to carry on the detailed theories description towards being partial to.Designed several creations to be partial to flap the light completely on this foundation( the line is partial to flap the light.Oval be partial to flap the light.The circle be partial to flap the light) of project, explained that the design principle proceeds together the project choice.The most in brief analytical tool is to be partial to flap the slice, pass two be partial to flap the slice,1 uses to come to rise to be partial to, a power that uses to check to be partial to is partial to flap to face to revolve the direction and direction with a diagraph account.Putting forward the measurement is partial to some methods of flap , point is mean with the vector of be partial to and flap he parameter measurement method, be partial to flap the light and oval be partial to the diagraph of flap the light. The end makes use of to be partial to flap the light experiment device, completing to be partial to comprehensive experiment of flap the light.Experiment the light road according to the project design, got a form and datas in the experiment, verify the design accuracy of method. Keywords:polarizer;compensator;Phase displacement;double booklet; Wave chip
§17-10偏振光的获得和检测 一、偏振光的获得 1. 布儒斯特定律 如果让自然光从折射率为n 1的介质射向折射率为n 2的介质而被界面反射,反射光中垂直于入射面的光振动成分将大于处于入射面内的光振动成分,当入射角等于某一特定角i 0时,反射光成为振动面垂直于入射面的线偏振光,并且i 0 满足 , (17-69) 这个规律称为布儒斯特定律,i 0称为布儒斯特角或起偏角。 当入射角为i 0时,折射角为r 0,根据折射定律,应有 . (17-70) 将这个关系代入式(17-69),得 , 即 , 这表示,当入射角为起偏角时,反射光与折射光互相垂直,如图17-40 所示。如果自然光从空气射到折射率为1.50的玻璃片上,根据布儒斯特定律, 可以求得起偏角为56.3?,此时的折射角为33.7?。 当自然光以起偏角从一种介质入射到第二种介质的表面上,反射光成为 线偏振光,而如果第二种介质没有特殊的吸收作用,那么折射光将成为部分偏振光,并且在入射面内的光振动成分将大于垂直于入射面的光振动成分。假如让这样的部分偏振光连续几次作同样的反射和折射, 最后获得的折射光也必定是线偏振光。
2. 晶体的双折射现象 在§8-7中讨论固体的一般性质时,曾涉及过晶体具有的一种普遍性质,即各向异性。这里我们所要说的各向异性,是在某些透明晶体中光沿不同的方向具有不同的传播速率,具有这种性质的晶体,称为双折射晶体。我们设想在各向同性的均匀介质中有一点光源s ,在任意瞬间光波的波面总是球面。而在均匀的双折射晶体中,点光源s 发出的光波波面却有两组,一组是球面,另一组是旋转椭球面,如图13-41所示。这两组波面在某一方向上彼此相切,如图中qq '的方向,这个方向称为晶体的光轴。 图 17-41 在一般情况下,当平行自然光垂直入射到晶体的表面时,根据惠更斯原理,被照射的晶体表面上各点都是 发射子波的波源,而子波的波面有球面和椭球面两种,所以子波波面的包络面也应有两种,即球面的包络 面和椭球面的包络面。于是折射光将分成两束,如图13-42(a)所示。由球面的包络面形成的折射光,称为寻 常光,用o 表示;由椭球面的包络面形成的折射光,称为非常光,用e 表示。寻常光o 是遵从折射定律的, 而非常光e 不遵从折射定律。如果晶体表面的法线恰好与光轴重合, 使垂直入射的自然光正好沿着光轴方 向,这时两种波面的包络面相重合,o 光和e 光相重合,即不发生双折射现象,如图13-42(b)所示。 (a) (b) 图 13-42 实验表明,当自然光射入双折射晶体时,两束折射光o 和e 都是线偏振光,并且它们的振动面通常接近于互相垂直。所以,如果能将寻常光与非常光分开,那么就可以利用双折射晶体由自然光获得线偏振光。通常采用的一种方法是使寻常光或非常光经过全反射而偏转到一侧,另一束光则无偏转地由晶体出射。尼科耳棱镜就是利用这个道理获得线偏振光的。 图17-43表示了一个尼科耳棱镜的示意图。它是由两块方解石(双折射晶体)直角棱镜(图中abd 和acd )用加拿大胶粘合而成的。光轴qq ¢与端面成48?角。当自然光沿平行于棱ac 的方向入射到端面ab 后, 折射成两束,即寻常光o 和非常光e 。寻常光o 的振动面与截面abcd 垂直,而非常光e 的振动面与截面abcd 平行。对于寻常光o ,方解石的折射率为1.658,加拿大胶的折射率为1.550,因此在方解石与加拿大胶的界面上发生全反射(入射角为76°,全反射的临界角为69?)。对于非常光e ,在此入射方向上方解石的折射率为1.516,加拿大胶的折射率仍为1.550,不会发生全反射,而进入第二个直角棱镜,并从端面cd 出射。这样就得到了线偏振光,光矢量的振动方向如图17-43(b)箭头所示。