FANUC Oi系统操作编程说明书
- 格式:pdf
- 大小:803.33 KB
- 文档页数:66
1第一篇:编程 51.综述 51.1可编程功能 51.2准备功能 51.3辅助功能72.插补功能72.1快速定位(G00)72.2直线插补(G01)82.3圆弧插补(G02/G03) 93.进给功能103.1进给速度103.2自动加减速控制103.3切削方式(G64) 10 3.4精确停止(G09)及精确停止方式(G61) 113.5暂停(G04) 114.参考点和坐标系114.1机床坐标系114.2关于参考点的指令(G27、G28、G29及G30) 114.2.1 自动返回参考点(G28) 114.2.2 从参考点自动返回(G29) 124.2.3 参考点返回检查(G27) 124.2.4 返回第二参考点(G30) 124.3工件坐标系134.3.1 选用机床坐标系(G53) 134.3.2 使用预置的工件坐标系(G54~G59) 134.3.3 可编程工件坐标系(G92) 144.3.4 局部坐标系(G52) 144.4平面选择155.坐标值和尺寸单位155.1绝对值和增量值编程(G90和G91) 156.辅助功能156.1M代码156.1.1 程序控制用M代码 16 6.1.2 其它M代码166.2 T代码166.3主轴转速指令(S代码) 166.4刚性攻丝指令(M29) 177.程序结构177.1程序结构177.1.1 纸带程序起始符(Tape Start) 177.1.2 前导(Leader Section) 177.1.3 程序起始符(Program Start) 177.1.4 程序正文(Program Section) 177.1.5 注释(Comment Section) 177.1.6 程序结束符(Program End) 1727.1.7 纸带程序结束符(Tape End) 187.2程序正文结构187.2.1 地址和词187.2.2 程序段结构187.2.3 主程序和子程序 198.简化编程功能208.1孔加工固定循环(G73,G74,G76,G80~G89) 208.1.1 G73(高速深孔钻削循环) 248.1.2 G74(左螺纹攻丝循环) 258.1.3 G76(精镗循环) 258.1.4 G80(取消固定循环) 26 8.1.5 G81(钻削循环) 268.1.6 G82(钻削循环,粗镗削循环) 278.1.7 G83(深孔钻削循环) 27 8.1.8 G84(攻丝循环) 288.1.9 G85(镗削循环) 288.1.10 G86(镗削循环) 28 8.1.11 G87(反镗削循环) 29 8.1.12 G88(镗削循环) 29 8.1.13 G89(镗削循环) 30 8.1.14 刚性攻丝方式308.1.15 使用孔加工固定循环的注意事项 319.刀具补偿功能319.1刀具长度补偿(G43,G44,G49) 319.2刀具半径补偿329.2.1 补偿向量329.2.2 补偿值329.2.3 平面选择329.2.4 G40、G41和G42 32 9.2.5 使用刀具半径补偿的注意事项 33第二篇:NC操作341.自动执行程序的操作 34 1.1CRT/MDI操作面板 34 1.1.1 软件键341.1.2 系统操作键341.1.3 数据输入键341.1.4 光标移动键341.1.5 编辑键和输入键 34 1.1.6 NC功能键341.1.6 电源开关按钮351.2MDI方式下执行可编程指令 351.3自动运行方式下执行加工程序 351.3.1 启动运行程序351.3.2 停止运行程序352.程序验证和安全功能 36 2.1程序验证功能3632.1.1 机床闭锁362.1.2 Z轴闭锁362.1.3 自动进给的倍率 36 2.1.4 快速进给的倍率 36 2.1.5 试运行362.1.6 单程序段运行362.2安全功能362.2.1 紧急停止362.2.2 超程检查363.零件程序的输入、编辑和存储 373.1新程序的注册373.2搜索并调出程序373.3插入一段程序373.4删除一段程序373.5修改一个词383.6搜索一个词384.数据的显示和设定384.1刀具偏置值的显示和输入 384.2G54~G59工件坐标系的显示和输入 394.3NC参数的显示和设定 394.4刀具表的修改395.显示功能405.1程序显示405.2当前位置显示406.在线加工功能406.1有关参数的修改: 406.2有关在线加工的操作. 417.机床参数的输入﹑输出 418.用户宏B功能448.1变量448.1.1变量概述448.1.2系统变量458.2算术和逻辑操作508.3分支和循环语句518.3.1无条件分支(GOTO语句) 518.3.2条件分支(IF语句) 528.3.3循环(WHILE语句) 52 8.3.4注意538.4宏调用538.4.1简单调用(G65) 54 8.4.2、模调用(G66、G67) 558.4.3G码调用宏568.4.4、M码调用宏568.4.5M码调用子程序 57 8.4.6T码调用子程序578.5附加说明574附录1:报警代码表591.程序报警(P/S报警) 592.伺服报警603.超程报警614.过热报警及系统报警 61 附录2:CRT/MDI面板图错误!未定义书签。
目录编程简介 2 第1 节准备代码表 3 第2 节辅助功能表 5 第3 节刀具运动 6 第4 节绝对值坐标8 第5 节增量值坐标9 第6 节线形插补12 第7 节圆弧插补13 第8 节平面选择14 第9 节编程圆弧15 第10节机床参考17 第11节自动换刀命令18 第12节工件坐标系编程19 第13节Z轴值20 第14节刀具测量方法21 第15节刀具长度偏置23 第16节初始平面和快速平面25 第17节固定循环26 第18节刀具半径偏置33 第19节子程序35 第20节多个工件坐标系统的使用38 第21节螺线插补选用功能40 第22节后台编辑41 第23节编程选项42 第24节刚性攻丝44 第25节PMC“KEEP RELAY”参数---------------------------------------- 45编程简介本加工中心的编程是指:用给定的工艺方法(产品工程方法)制定出制造工件所需的一系列操作运行步骤。
第一步是写出FANUC控制系统能认识的格式,这叫做字地址编程格式。
每一个“字”都是一个完整的命令,用以指示控制系统执行某种特定的操作。
例:S1000 设置主轴转速为1000rpm;但控制系统不能确定主轴的旋转方向(顺时针/逆时针),因此编程员必须既确定主轴速度,也确定主轴旋转方向。
例:S1000 M03 将主轴转速设置为1000rpm(S1000)并顺时针启动主轴旋转(M03)。
在同一程序行中可编制多个“字”(如上例所示),因此减少了程序员所需的程序步骤。
每一个“字”的字母地址后需跟上数值,例S1000,其数值不能超越编程范围。
例:对S为0至9999,这些在同一行中写出的“字”,将组成程序信息的一“段”。
例如:N100 S1000 M03(程序段号)(转速)(方向)连续列出的“段”组成了“程序”。
第1节准备代码表(G功能)下列的G地址,确定了相关程序的指令含义。
G代码分为下列两类:一次有效代码----这种代码仅在写入的当段有效。
![FANUC Oв[1]](https://uimg.taocdn.com/17357b2bbd64783e09122b9c.webp)
参考资料:FANUC O系列操作编程说明书第一篇:编程5 1.综述5 1.1可编程功能5 1.2准备功能51.3辅助功能72.插补功能8 2.1快速定位(G00)8 2.2直线插补(G01)82.3圆弧插补(G02/G03)93.进给功能11 3.1进给速度11 3.2自动加减速控制11 3.3切削方式(G64)11 3.4精确停止(G09)及精确停止方式(G61) 123.5暂停(G04) 124.参考点和坐标系13 4.1机床坐标系13 4.2关于参考点的指令(G27、G28、G29及G30) 13 4.2.1 自动返回参考点(G28)13 4.2.2 从参考点自动返回(G29)13 4.2.3 参考点返回检查(G27)14 4.2.4 返回第二参考点(G30)14 4.3工件坐标系15 4.3.1 选用机床坐标系(G53)15 4.3.2 使用预置的工件坐标系(G54~G59)15 4.3.3 可编程工件坐标系(G92)16 4.3.4 局部坐标系(G52) 164.4平面选择175.坐标值和尺寸单位185.1绝对值和增量值编程(G90和G91)186.辅助功能19 6.1M代码19 6.1.1 程序控制用M代码19 6.1.2 其它M代码19 6.2T代码19 6.3主轴转速指令(S代码) 206.4刚性攻丝指令(M29)207.程序结构21 7.1程序结构21 7.1.1 纸带程序起始符(Tape Start) 21 7.1.2 前导(Leader Section) 21 7.1.3 程序起始符(Program Start) 217.1.4 程序正文(Program Section) 21 7.1.5 注释(Comment Section) 21 7.1.6 程序结束符(Program End) 21 7.1.7 纸带程序结束符(Tape End) 22 7.2程序正文结构22 7.2.1 地址和词22 7.2.2 程序段结构227.2.3 主程序和子程序238.简化编程功能25 8.1孔加工固定循环(G73,G74,G76,G80~G89) 25 8.1.1 G73(高速深孔钻削循环)28 8.1.2 G74(左螺纹攻丝循环)29 8.1.3 G76(精镗循环) 29 8.1.4 G80(取消固定循环) 30 8.1.5 G81(钻削循环) 30 8.1.6 G82(钻削循环,粗镗削循环) 31 8.1.7 G83(深孔钻削循环) 31 8.1.8 G84(攻丝循环) 32 8.1.9 G85(镗削循环) 32 8.1.10 G86(镗削循环) 32 8.1.11 G87(反镗削循环) 33 8.1.12 G88(镗削循环) 33 8.1.13 G89(镗削循环) 34 8.1.14 刚性攻丝方式348.1.15 使用孔加工固定循环的注意事项359.刀具补偿功能36 9.1刀具长度补偿(G43,G44,G49) 36 9.2刀具半径补偿36 9.2.1 补偿向量36 9.2.2 补偿值36 9.2.3 平面选择36 9.2.4 G40、G41和G4236 9.2.5 使用刀具半径补偿的注意事项37第二篇:NC操作381.自动执行程序的操作38 1.1CRT/MDI操作面板38 1.1.1 软件键38 1.1.2 系统操作键38 1.1.3 数据输入键38 1.1.4 光标移动键38 1.1.5 编辑键和输入键38 1.1.6 NC功能键38 1.1.6 电源开关按钮39 1.2MDI方式下执行可编程指令39 1.3自动运行方式下执行加工程序39 1.3.1 启动运行程序391.3.2 停止运行程序392.程序验证和安全功能40 2.1程序验证功能40 2.1.1 机床闭锁402.1.2 Z轴闭锁40 2.1.3 自动进给的倍率40 2.1.4 快速进给的倍率40 2.1.5 试运行40 2.1.6 单程序段运行402.2安全功能402.2.1 紧急停止402.2.2 超程检查403.零件程序的输入、编辑和存储41 3.1新程序的注册41 3.2搜索并调出程序41 3.3插入一段程序41 3.4删除一段程序41 3.5修改一个词423.6搜索一个词424.数据的显示和设定43 4.1刀具偏置值的显示和输入43 4.2G54~G59工件坐标系的显示和输入43 4.3NC参数的显示和设定434.4刀具表的修改445.显示功能45 5.1程序显示455.2当前位置显示456.在线加工功能46 6.1有关参数的修改:466.2有关在线加工的操作. 467.机床参数的输入﹑输出478.用户宏B功能49 8.1变量49 8.1.1变量概述498.1.2系统变量508.2算术和逻辑操作55 8.3分支和循环语句56 8.3.1无条件分支(GOTO语句)56 8.3.2条件分支(IF语句)57 8.3.3循环(WHILE语句)57 8.3.4注意58 8.4宏调用58 8.4.1简单调用(G65)58 8.4.2、模调用(G66、G67)60 8.4.3G码调用宏61 8.4.4、M码调用宏618.4.5M码调用子程序62 8.4.6T码调用子程序62 8.5附加说明62附录1:报警代码表641.程序报警(P/S报警) 642.伺服报警653.超程报警664.过热报警及系统报警66第一篇:编程1. 综述1.1 可编程功能通过编程并运行这些程序而使数控机床能够实现的功能我们称之为可编程功能。
数控车床编程入门知识数控车床的程序编制必须严格遵守相关的标准,数控编程是一项很严格的工作,首先必须掌握一些基础知识,才能学好编程的方法并编出正确的程序。
一、数控车床的坐标系与运动方向的规定(一)建立坐标系的基本原则1.永远假定工件静止,刀具相对于工件移动。
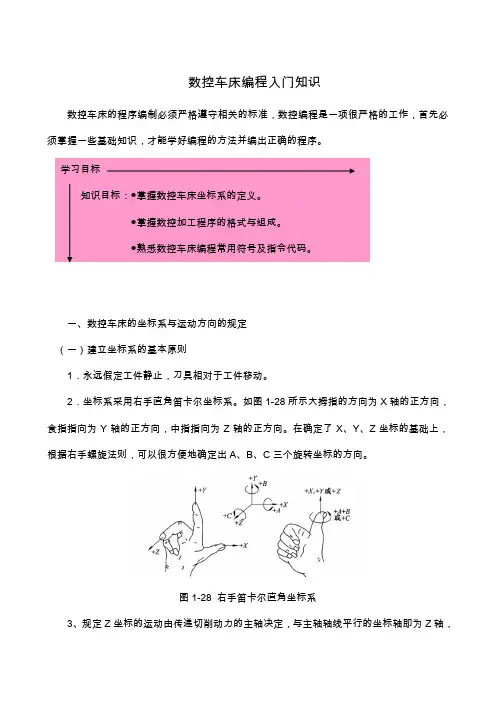
2.坐标系采用右手直角笛卡尔坐标系。
如图1-28所示大拇指的方向为X轴的正方向,食指指向为Y轴的正方向,中指指向为Z轴的正方向。
在确定了X、Y、Z坐标的基础上,根据右手螺旋法则,可以很方便地确定出A、B、C三个旋转坐标的方向。
图1-28 右手笛卡尔直角坐标系3、规定Z坐标的运动由传递切削动力的主轴决定,与主轴轴线平行的坐标轴即为Z轴,学习目标知识目标:●掌握数控车床坐标系的定义。
●掌握数控加工程序的格式与组成。
●熟悉数控车床编程常用符号及指令代码。
X轴为水平方向,平行于工件装夹面并与Z轴垂直。
4、规定以刀具远离工件的方向为坐标轴的正方向。
依据以上的原则,当车床为前置刀架时,X轴正向向前,指向操作者,如图1-29所示;当机床为后置刀架时,X轴正向向后,背离操作者,如图1-30所示。
图1-29 水平床身前置刀架式数控车床的坐标系图1-30 倾斜床身后置刀架式数控车床的坐标系(二)机床坐标系机床坐标系是以机床原点为坐标系原点建立起来的ZOX轴直角坐标系。
1.机床原点机床原点(又称机械原点)即机床坐标系的原点,是机床上的一个固定点,其位置是由机床设计和制造单位确定的,通常不允许用户改变。
数控车床的机床原点一般为主轴回转中心与卡盘后端面的交点,如图1-31所示。
图1-31 机床原点2.机床参考点机床参考点也是机床上的一个固定点,它是用机械挡块或电气装置来限制刀架移动的极限位置。
作用主要是用来给机床坐标系一个定位。
因为如果每次开机后无论刀架停留在哪个位置,系统都把当前位置设定成(0,0),这就会造成基准的不统一。
数控车床在开机后首先要进行回参考点(也称回零点)操作。

FANUC-OI-A系统参数说明书范文1-图文◆BEIJING一FANUCOI-A系统参数说明书B-63510C/01●本说明书中任何部分不得以任何形式复制。
●所有规格和设计如有变化,公司不作另行通知。
本说明书中,我们将尽力叙述各种事件。
但由于篇幅所限,不能对所有不必做和不能做的事件进行叙述。
因此本说明书中没有特别指明为可能的事件即视为“不可能’’的事件。
B-63510C/01前言本说明书适合以下机种系统名称BEIJING-FANUC0i—TABEIJING-FANUC0i—MAT系列:OI-TA M系列:OI-MA2、本说明书所叙述的某些功能,可能不适应某些产品。
详细情况,参照规格说明书。
(B63502C)相关说明书下表列出了和oi系列MODELA相关的说明书。
带(·)的为本说明书。
表l相关说明书说明书名称规格说明书连接说明书(硬件)连接说明书(功能)操作说明书(车床用)操作说明书(力11512中心用)维修说明书参数说明书编程说明书(宏程序编译器/宏程序执行器)FAPT宏程序编译器编程说明书PMCSAI/SA3编程说明书规格号B-63502CB-63503CB-63503C-1B-63504CB-63514CB-63505CB-63510CB-61803E-1B-66102EB-61863C^简称Oi—TA0i-MA0i系列注1、为了便于记忆系统划分为:—B-6—3510C/01目录前言P-11.参数的显示一12.用MDI设定参数23、通过阅读机/穿口机接口输入/输出参数43.1通过阅读机/穿口机接口输出参数53.2通过阅读机/穿口机接口输入参数64.参数说明74.1有关“SETTING”的参数94.2有关阅读机/穿口机接口的参数124.2.1所有通道共用的参数124.2.2有关通道1的参数(I/O=0)134.2.3有关通道1的参数(I/O=1)..144.2.4有关通道2的参数(I/O=2)154.3有关POWERMATE管理器的参数164.4有关轴控制/设定单位的参数..174.5有关座标系的参数234.6有关存储式行程检测的参数274.7有关进给速度的参数314.8有关加减速控制的参数414.17有关刚性攻丝的参数1414.18有关缩放/坐标旋转的参数1574.19有关单一方向定位的参数1594.20有关极坐标插补的参数1604.21有关法线方向控制的参数1624.22有关分度盘分度的参数1644.23有关用户宏程序的参数1664.24有关图案数据输入的参数1724.25有关跳步功能的参数1734.26有关自动刀具补偿(T系列)和自动刀具长度补偿(M系列)的参数1754.27有关外部数据输入/输出的参数1764.28有关图形显示的参数1774.29有关运行时间和加工零件数显示的参数1784.30有关刀具寿命管理的参数1814.31有关位置开关功能的参数1854.32有关手动运行和自动运行的参数1864.33有关手动手轮进给和手动插入的参数1874.34有关用档块设定参考点的参数1894.35有关软操作面板的参数1914.36有关程序再起动的参数1954.37有关多边形加工的参数..1964.38有关PMC轴控制的参数1974.39有关基本功能的参数2014.40有关简易同步控制的参数·2034.41有关顺序号校对停止的参数2054.42其它参数2064.43有关维修的参数206附录A。
fanuc oitc操作说明书“一个”基本的编程概念<br介绍“三化”单一固定循环“四大”复合固定循环“两节”常见G代码/> “十二五”的用户宏“六个一”线程“七”T代码和刀具补偿“八”F代码和G98,G99“九”S码和G96,G97(注:这是对学习材料参考编程的宽一些实际操作中应GSK980T车床数控系统使用手册为准)>编程“一”的基本概念:一般用在一次装夹过程中一个完整的车床程序根据工件加工的NC程序,包括程序号,程序段的要求完成。
(一)程序号:等同于程序名,程序号系统通过从存储器中的程序,以确定一些程序要处理,用字母O程序号和四位数字。
(2)块:一个程序语句的等价物,由多个领域,最后是一个分号(EOB打字;)输入后会自动添加关键。
由多个块,一个块或一组完成该工具的移动或实现一些机器的特征构成的程序。
领域(或词)(三):一个英文字母叫“地址”加了一些数字。
根据其功能可分为字段的以下几种类型:▲座数:字母N和数字组成,位于挡在前面,主要作用是使程序更易于阅读,可以省略,但一些特殊的程序段(如跳转指令,表示程序段的目标)必须标明的块号。
程序,以方便插入,当一个新的块,每个句子的块数一般间隔一些数字(如N0010,N0020,N0030)。
▲ready函数:G代码,用字母G和两位数字,大部分的G代码来表示刀具的运动。
(如G00,G01,G02)▲表示的大小的字段的(坐标):一般用在后面的G代码字段提供的坐标数据,在G代码表示从一个信移动到的坐标值??(整数或小数)组件。
信件包括:表示绝对坐标:X,Y,Z表示相对坐标:U,V,W说,园心坐标:I,J,K(仅使用X中的实际车床坐标,Z,那么Y,V,J没有必要)▼饲料中的字段,表示:?用字母F的值添加到该组合物中,通常以该内插指令块,提供高速插补运动。
▼S码:表示主轴转速领域。
rpm主轴以字母S加(或主轴速度:米/分钟)的组件。
▼T代码:那ATC刀具补偿▼辅助功能:组成以字母M和两位数字,这意味着该机器是开放的,停止等。
◆BEIJING一FANUC OI-A系统参数说明书 B-63510C/01●本说明书中任何部分不得以任何形式复制。
●所有规格和设计如有变化,公司不作另行通知。
本说明书中,我们将尽力叙述各种事件。
但由于篇幅所限,不能对所有不必做和不能做的事件进行叙述。
因此本说明书中没有特别指明为可能的事件即视为“不可能’’的事件。
B-63510C/01前言本说明书适合以下机种注1、为了便于记忆系统划分为:T系列:OI-TAM系列:OI-MA2、本说明书所叙述的某些功能,可能不适应某些产品。
详细情况,参照规格说明书。
(B63502C)相关说明书下表列出了和oi系列MODEL A相关的说明书。
带(·)的为本说明书。
表l相关说明书—B-6—3510C/01 目录前言……… P-11.参数的显示........................一 (1)2.用MDI设定参数 (2)3、通过阅读机/穿口机接口输入/输出参数 (4)3.1通过阅读机/穿口机接口输出参数 (5)3.2通过阅读机/穿口机接口输入参数 (6)4.参数说明 (7)4.1有关“SETTING”的参数 (9)4.2有关阅读机/穿口机接口的参数 (12)4.2.1所有通道共用的参数 (12)4.2.2有关通道1的参数(I/O=0) (13)4.2.3有关通道1的参数(I/O=1).. (14)4.2.4有关通道2的参数(I/O=2) (15)4.3有关POWER MATE管理器的参数 (16)4.4有关轴控制/设定单位的参数................................... (17)4.5有关座标系的参数 (23)4.6有关存储式行程检测的参数 (27)4.7有关进给速度的参数 (31)4.8有关加减速控制的参数 (41)4.9有关伺服的参数 (54)4.10有关DI/DO的参数 (68)4.1 1有关MDI、显示和编辑的参数 (71)4.12有关程序的参数 (85)4.13有关螺距误差补偿的参数 (92)4.14有关主轴控制的参数 (96)4.15有关刀具补偿的参数 (124)4.16有关固定循环的参数 (131)4.16.1有关钻削固定循环的参数 (131)4.16.2有关螺纹切削循环的参数 (135)4.16.3有关多重固定循环的参数 (135)4.16.4有关小孔钻削循环的参数 (137)4.17有关刚性攻丝的参数 (141)4.18有关缩放/坐标旋转的参数 (157)4.19有关单一方向定位的参数 (159)4.20有关极坐标插补的参数 (160)4.21有关法线方向控制的参数 (162)4.22有关分度盘分度的参数 (164)4.23有关用户宏程序的参数 (166)4.24有关图案数据输入的参数 (172)4.25有关跳步功能的参数 (173)4.26有关自动刀具补偿(T系列)和自动刀具长度补偿(M系列)的参数 175 4.27有关外部数据输入/输出的参数 (176)4.28有关图形显示的参数 (177)4.29有关运行时间和加工零件数显示的参数 (178)4.30有关刀具寿命管理的参数 (181)4.31有关位置开关功能的参数 (185)4.32有关手动运行和自动运行的参数 (186)4.33有关手动手轮进给和手动插入的参数 (187)4.34有关用档块设定参考点的参数 (189)4.35有关软操作面板的参数 (191)4.36有关程序再起动的参数 (195)4.37有关多边形加工的参数................................... (196)4.38有关PMC轴控制的参数 (197)4.39有关基本功能的参数 (201)4.40有关简易同步控制的参数 (203)4.41有关顺序号校对停止的参数 (205)4.42 其它参数 (206)4.43有关维修的参数 (206)附录 A。

fanuc series oi-tf plus参数说明书参数简介:Fanuc Series OI-TF Plus是一款高性能的数控系统,它具有多项可调参数,以满足各种机床的需求。
本文将对其参数进行详细说明,以帮助用户更好地了解和使用这款系统。
1. 系统参数1.1 系统版本:Fanuc Series OI-TF Plus具有多个版本,用户可以根据具体需求选择合适的版本进行安装和使用。
1.2 通信参数:系统支持多种通信方式,包括以太网、串口和USB 等,用户可以根据需要进行相应的设置。
2. 运动控制参数2.1 速度参数:用户可以根据加工要求设置系统的最大速度、加速度和减速度等参数,以实现精准的运动控制。
2.2 位置参数:系统支持绝对坐标和相对坐标两种方式,用户可以根据具体需求进行设置。
2.3 插补参数:系统支持直线插补和圆弧插补,用户可以根据实际情况进行参数设置,以实现高精度的插补运动。
3. 输入输出参数3.1 输入参数:用户可以根据外部传感器信号设置系统的输入参数,以实现对外部环境的灵活响应。
3.2 输出参数:系统支持多种IO输出方式,用户可以根据需求设置IO端口的功能和输出信号。
4. 程序参数4.1 程序号参数:用户可以设置系统的程序号范围和程序号步长等参数,以方便程序管理和编写。
4.2 G代码参数:系统支持多种G代码语言,用户可以根据需要选择合适的语言进行设置。
4.3 循环参数:系统支持多种循环功能,用户可以根据加工需求进行相应的设置,以提高加工效率。
5. 内部参数5.1 机床参数:用户可以根据具体机床的结构和功能进行参数设置,以确保系统与机床的良好适配。
5.2 诊断参数:系统内置了多种诊断功能,用户可以根据需要设置诊断参数,以实现故障诊断和排除。
总结:本文对Fanuc Series OI-TF Plus参数进行了详细的说明,包括系统参数、运动控制参数、输入输出参数、程序参数和内部参数等。
通过合理设置这些参数,用户可以更好地利用该系统进行加工操作,提高生产效率和产品质量。
FANUC Series 0+-MODEL F加工中心系统操作说明书B-64604CM-2/01·本说明书的任何内容不得以任何方式复制。
·本机的外观及规格如需改良而变更,恕不另行通知。
本说明书中所载的产品,受到日本国《外汇和外国贸易法》的限制。
从日本将这些出口到其他国家时,必须获得日本国政府的出口许可。
另外,将该产品再出口到其他国家时,应获得再出口该产品的国家的政府许可。
此外,该产品可能还受到美国政府的再出口法的限制。
若要出口或者再出口此类产品,请向FANUC公司洽询。
本说明书中记载的商品是在严格的质量管理下制造的,在因本商品的故障而预测会导致重大事故或者损失时,请对安全进行充分考虑。
我们试图在本说明书中描述尽可能多的情况。
然而,要在本说明书中注明所有禁止或不能做的事宜,需要占用说明书的大量篇幅,所以本说明书中没有一一列举。
因此,对于那些在说明书中没有特别指明可以做的事,都应解释为“不可”。
B-64604CM-2/01安全使用须知安全使用须知为了更加安全地使用CNC装置附带的机床(以下简称“机床”),“安全使用须知”描述与CNC装置相关的安装注意事项。
用户所使用的某些CNC装置虽然没有相对应的功能,但已经标上了该项注意事项,用户在阅读时可以忽略。
有关机床的安全注意事项,请参阅机床制造商提供的说明书。
凡是编写机床程序和进行机床操作的作业人员,必须在充分理解机床制造商提供的说明书和本说明书的内容后再使用。
目录警告、注意和注释........................................................................................................................................................................s-1 一般警告和注意............................................................................................................................................................................s-1 与编程有关的警告和注意............................................................................................................................................................s-2 与操作有关的警告和注意............................................................................................................................................................s-3 与日常维护有关的警告................................................................................................................................................................s-4警告、注意和注释本说明书包括保证操作人员人身安全以及防止机床损坏的有关安全的注意事项,并根据它们在安全方面的重要程度,在正文中以“警告”和“注意”来叙述。
第三章FANUC oi数控车床第一节FANUC O-T DⅡ控制面板一、系统功能指令表在表3-1中列出的是FANUC O-TD Ⅱ系统常用指令。
表3-1 系统功能指令表注1). *号表示电源接通时G代码状态。
注2). 00组的代码为一次性代码。
注3). 一但指定了G代码一览表中没有的G代码,系统显示报警。
(NO.010)注4). 无论有几个不同组的G代码,不能在同一程序段内指令,果同组的G代码在同一程序段内指令了2个以上的代码时,指令后者有效。
注5).以上所述同样适用于M代码。
二、FANUC O-TDⅡCK6136A 数控车床的操作1、开机机床在开机之前应先接通380 V±2%相交流电源,并且确定以下几项注意事项:1)、机床不得处于-5℃以下和40℃以上温度环境下运行。
2)、机床不得处于湿度大于75%环境下运行。
3)、机床不得在高粉尘杂质空气和含污染腐蚀的物质的[空气中运行。
确定以上几项之后,接通电源,打开机床电源开关,按下CNC启动按钮后等待系统启动正常即可对其进行操作,系统启动过程中不要碰MDI面板上的任何键。
2、熟悉机床操作面板CK6136A数控车床的操作面板由CRT/MDI面板和机床操作面板组成。
(见图3-1)图3-1 机床操作面板1).CRT/MDI面板CRT/MDI面板是由一个9英寸.CRT显示器和一个MDI键盘构成的。
(见图3-2)按任何一个功能按钮和“CAN”画面的显示就会消失,这时系统内部照常工作。
之后再按其中任何一个功能键,画面会再次显示。
长时间接通电源而不使用CRT时,要先清除画面,以防止画面质量下降。
图3-2. CRT/MDI 面板键 名称 功用说明RESET 复位键 按下此键,复位CNC 系统。
包括取消报警、主轴故障复位、中途退出自动操作循环和中途退出输入、输出过程等 CURSOR 光标移动键 用于CRT 页面上,一步步移动光标:向前移动光标 :向后移动光标 PAGE 页面变换键 用于在CRT 屏幕选择不同的页面:向前变换页面 :向后变换页面等键-地址/数字输入键按下这些键,输入字母、数字和其他字符(CNC 系统先确认字母,后确认数字。
1版权声明佳泰数控(泉州)有限公司保留所有权力本操作手册由佳泰数控(泉州)有限公司编制,公司有权力不通知用客的情况下,修改本手册。
佳泰数控不承由于不正确使用本手册和机床的情况下,所造成的一切间接,直接或附带的损失和人员伤害。
在未经许可的情况下,不得擅自修改,复制,出售本手册,由此造成的法律纠纷,本公司概不负责。
前言感谢您使用我公司的数控机床我们以领先世界的数控技术,可靠性能,完善的售后服务,高效的技术支持,为你的发展尽一臂之力。
关于我们更多的信息佳泰数控(泉州)有限公司网址:想了解更多关于我们公司或者产品信息可以登陆。
您可以通过电话或者信件的方式,和我们的技术人员进行沟通。
你可以通过以下的途径获得我们的技术支持和售后服务电话:电子邮箱:传真:通信地址:本手册的目的:·了解熟练地使用我公司的数控机床·能对机床进行日常维护和保养·能正确地使用我公司数控机床的各项功能本手册的使用对象:·数控机床操作人员·数控编程工程师·数控机床的维护和保养人员本手册的主要内容11.操作面板说明1.1 操作面板的外观1.2 操作面板功能说明 紧急停止1.21 按下该按钮可以使机床各马达处于停止状及外部电源,机床处开启状态。
1.22 机床处于以下状态中:(A ) 所有轴(包括第四轴)停止移动。
(B ) 主轴停止转动。
(C ) 显示屏显示异警信息。
(D ) 异警红灯亮。
(E )刀库的旋转及换刀的动作停止。
1.23解除方法:将此按钮顺时针方向旋转,即可。
但是有下列几点必须要考虑: (A ) 只有在解除了紧急停止的问题来源后,才可以复归这个按钮。
(B )紧急停止的命令和状态解除后,机床必须再重新执行。
当在更换刀具的过程中,按下紧急停止按钮后所有的动作都会停止,所以可能刀库会未定位,必须让它回到正确位置。
操作模式1.24 操作前请确定好操作模式。
1.25 共有七种模式可供选择 (A )增量有四档: ×1、×10、×100、×1000。
FANUC 0i-MC系统指令介绍与应用第一节FANUC 0i-MB系统介绍一、FAMUC 0i-MB系统功能加工中心在编程时,对加工中心自动运行的各个动作,如主轴的转、停;刀具的自动换刀;切削的进给速度;切削液的开、关等,都要以指令的形式予以给定。
我们把这类指令称为功能指令,它有准备功能G 指令、辅助功能M指令以及F、S、T、H、D指令等几种。
1.准备功能G指令准备功能G指令有模态和非模态两种指令。
非模态G指令只在指令它的程序段中有效;模态G指令一直有效,直到被同一组的其它G指令所替代。
FANUC 0i-MB加工中心的准备功能G指令见表3-1。
②00组G指令中,除了G10和G11以外其它的都是非模态G指令。
③一旦指令了G指令表中没有的G指令,显示报警。
(NO.010)④不同组的G指令在同一个程序段中可以指令多个,但如果在同一个程序段中指令了两个或两个以上同一组的G指令时,则只有最后一个G指令有效。
⑤在固定循环中,如果指令了01组的G指令,则固定循环将被自动取消,变为G80的状态。
但是,01组的G指令不受固定循环G指令的影响。
⑥G指令按组号显示。
2.辅助功能M指令M指令主要用于机床操作时的工艺性指令,如主轴的启停、切削液的开关等。
它分为前指令和后指令两类。
前指令是指该指令在程序段中首先被执行(不管该指令是否写在程序段的前或后),然后执行其它指令;后指令则相反。
具体的M指令参见表3-2。
表3-2 FANUC 0i-MB系统辅助功能M指令在切削加工过程中,CNC将刀具移动到指定位置,而刀具位置由刀具在坐标系中的坐标值表示。
在系统中有三种坐标系:(1)机床坐标系;(2)工件坐标系;(3)局部坐标系。
(一)机床坐标系机床上的一个用作为加工基准的特定点称为机床零点,机床制造厂对每台机床设置机床零点。
用机床零点作为原点设置的坐标系称为机床坐标系。
加工中心在通电后,执行手动返回参考点来设置机床坐标系,机床坐标系一旦设定,就保持不变,直到电源关闭为止。
操作説明書加工中心系统操作说明书B-64304CM-2/02FANUC Series 0+-MODEL DFANUC Series 0+ Mate-MODEL D·本说明书的任何内容不得以任何方式复制。
·本机的外观和规格会随着改进而有所变更。
本说明书中所载的商品,内置有基于《外汇及对外贸易法》管制的软件。
因此,在出口本商品时,必须得到该法律的准许。
我们试图在本说明书中描述尽可能多的情况。
然而,对于那些不必做的和不可能做的情况,由于存在各种可能性,我们没有描述。
因此,对于那些在说明书中没有特别描述的情况,可以视为“不可能”的情况。
本说明书中记载有我公司产品以外的程序名称和设备名称,它们包含在各制造商的注册商标中。
但是,正文中在某些情况下并没有标注®和TM标记。
B-64304CM-2/02为了安全使用为了安全使用为了更加安全地使用CNC装置附带的机床(以下简称“机床”,“为了安全使用”描述与CNC装置相关的安装注意事项。
用户所使用的某些CNC装置虽然没有相对应的功能,但已经标上了不相符的注意事项,用户在阅读时可以忽略。
有关机床的安全注意事项,请参阅机床制造商提供的说明书。
凡是编写机床程序和进行机床操作的作业人员,必须在充分理解机床制造商提供的说明书和本说明书的内容后再使用。
目录警告、注意和注释............................................................................................................................................ ............................s-1 一般警告和注意............................................................................................................................................ ................................s-1 与编程有关的警告和注意............................................................................................................................................ ................s-2 与操作有关的警告和注意............................................................................................................................................ ................s-3 与日常维修有关的警告............................................................................................................................................ ....................s-4警告、注意和注释本说明书包括保证操作人员人身安全以及防止机床损坏的有关安全的注意事项,并根据它们在安全方面的重要程度,在正文中以“警告”和“注意”来叙述。
法拉克OiM数控系统操作及主要编程命令的使用方法撰写人:王成凯(严正声明:该文稿的著作权归原作者所有,谨以交流学习之用。
未经许可,不得用于商业或其他用途,否则追究法律责任。
)世界第一台数控机床于1952年在美国麻省理工学院诞生,经历了半个多世纪的发展,目前已经出现最先进的六轴联动加工数控机床,进入新世纪以来,国内先后多家公司研制出五轴加工数控机床,数控机床不仅仅是一台先进的机器,更代表着一个国家的工业机械水平。
在国防,科研人民生活生产方面正发挥着不可替代的作用。
数控编程主要步骤方法:1.程序号;(法拉克OiM系统一般默认以O开头的四位数值,即O0001或其他。
法拉克机床中的程序都是保留的,便于下次的再次调用。
但是每一个程序号都不得重复。
我们如果删除全部程序可以按O-9999,然后按delete键删除全部程序。
)2.设置零点,系统初始状态;(建立机床坐标系以及工件坐标系)3.快速定位至下刀点;4.下刀;(下刀时,我们应当圆弧切入尽量避免刀具与实际轮廓的碰擦,导致工件的受伤进而影响工件的表面粗糙度。
)5.建立刀具半径及长度补偿;6.走刀;(该部分为主要编程部分)7.抬刀;8.取消刀具半径及长度补偿;9.程序结束;(值得注意的是:机床在加工前,我们首先应将机床复位,即建立机床坐标系,然后才能够建立工件坐标系。
在解决超行程问题时,我们首先应当释放行程,然后将超行程的坐标轴方向,向反方向空行程返回,当然,解决超行程问题的方法很多,每个人的解决方法也不尽相同。
另外,在法拉克系统中,我们要知道的是始终假定工件不动,而刀具围绕工件进行的切削加工。
)主要数控编程命令:我们在编程之前,有几个字母应当首先理解。
即F,S等等。
他们是编程的基础,这些代码控制着机床主轴正转的速度及进给量间接影响着工件温度(温度对工件的热变形影响),对机床主轴的使用寿命也起着至关重要的影响。
对工件加工精度的影响尤为重要。
一般情况:铣刀转速为:45m min钻头转速为:15m min麻花钻转速:8m min攻丝转速为:3m min(以上都是经验所得,具体转速应当结合实际。
参考资料:FANUC O系列操作编程说明书第一篇:编程5 1.综述5 1.1可编程功能5 1.2准备功能51.3辅助功能72.插补功能8 2.1快速定位(G00)8 2.2直线插补(G01)82.3圆弧插补(G02/G03)93.进给功能11 3.1进给速度11 3.2自动加减速控制11 3.3切削方式(G64)11 3.4精确停止(G09)及精确停止方式(G61) 123.5暂停(G04) 124.参考点和坐标系13 4.1机床坐标系13 4.2关于参考点的指令(G27、G28、G29及G30) 13 4.2.1 自动返回参考点(G28)13 4.2.2 从参考点自动返回(G29)13 4.2.3 参考点返回检查(G27)14 4.2.4 返回第二参考点(G30)14 4.3工件坐标系15 4.3.1 选用机床坐标系(G53)15 4.3.2 使用预置的工件坐标系(G54~G59)15 4.3.3 可编程工件坐标系(G92)16 4.3.4 局部坐标系(G52) 164.4平面选择175.坐标值和尺寸单位185.1绝对值和增量值编程(G90和G91)186.辅助功能19 6.1M代码19 6.1.1 程序控制用M代码19 6.1.2 其它M代码19 6.2T代码19 6.3主轴转速指令(S代码) 206.4刚性攻丝指令(M29)207.程序结构21 7.1程序结构21 7.1.1 纸带程序起始符(Tape Start) 21 7.1.2 前导(Leader Section) 21 7.1.3 程序起始符(Program Start) 217.1.4 程序正文(Program Section) 21 7.1.5 注释(Comment Section) 21 7.1.6 程序结束符(Program End) 21 7.1.7 纸带程序结束符(Tape End) 22 7.2程序正文结构22 7.2.1 地址和词22 7.2.2 程序段结构227.2.3 主程序和子程序238.简化编程功能25 8.1孔加工固定循环(G73,G74,G76,G80~G89) 25 8.1.1 G73(高速深孔钻削循环)28 8.1.2 G74(左螺纹攻丝循环)29 8.1.3 G76(精镗循环) 29 8.1.4 G80(取消固定循环) 30 8.1.5 G81(钻削循环) 30 8.1.6 G82(钻削循环,粗镗削循环) 31 8.1.7 G83(深孔钻削循环) 31 8.1.8 G84(攻丝循环) 32 8.1.9 G85(镗削循环) 32 8.1.10 G86(镗削循环) 32 8.1.11 G87(反镗削循环) 33 8.1.12 G88(镗削循环) 33 8.1.13 G89(镗削循环) 34 8.1.14 刚性攻丝方式348.1.15 使用孔加工固定循环的注意事项359.刀具补偿功能36 9.1刀具长度补偿(G43,G44,G49) 36 9.2刀具半径补偿36 9.2.1 补偿向量36 9.2.2 补偿值36 9.2.3 平面选择36 9.2.4 G40、G41和G4236 9.2.5 使用刀具半径补偿的注意事项37第二篇:NC操作381.自动执行程序的操作38 1.1CRT/MDI操作面板38 1.1.1 软件键38 1.1.2 系统操作键38 1.1.3 数据输入键38 1.1.4 光标移动键38 1.1.5 编辑键和输入键38 1.1.6 NC功能键38 1.1.6 电源开关按钮39 1.2MDI方式下执行可编程指令39 1.3自动运行方式下执行加工程序39 1.3.1 启动运行程序391.3.2 停止运行程序392.程序验证和安全功能40 2.1程序验证功能40 2.1.1 机床闭锁402.1.2 Z轴闭锁40 2.1.3 自动进给的倍率40 2.1.4 快速进给的倍率40 2.1.5 试运行40 2.1.6 单程序段运行402.2安全功能402.2.1 紧急停止402.2.2 超程检查403.零件程序的输入、编辑和存储41 3.1新程序的注册41 3.2搜索并调出程序41 3.3插入一段程序41 3.4删除一段程序41 3.5修改一个词423.6搜索一个词424.数据的显示和设定43 4.1刀具偏置值的显示和输入43 4.2G54~G59工件坐标系的显示和输入43 4.3NC参数的显示和设定434.4刀具表的修改445.显示功能45 5.1程序显示455.2当前位置显示456.在线加工功能46 6.1有关参数的修改:466.2有关在线加工的操作. 467.机床参数的输入﹑输出478.用户宏B功能49 8.1变量49 8.1.1变量概述498.1.2系统变量508.2算术和逻辑操作55 8.3分支和循环语句56 8.3.1无条件分支(GOTO语句)56 8.3.2条件分支(IF语句)57 8.3.3循环(WHILE语句)57 8.3.4注意58 8.4宏调用58 8.4.1简单调用(G65)58 8.4.2、模调用(G66、G67)60 8.4.3G码调用宏61 8.4.4、M码调用宏618.4.5M码调用子程序62 8.4.6T码调用子程序62 8.5附加说明62附录1:报警代码表641.程序报警(P/S报警) 642.伺服报警653.超程报警664.过热报警及系统报警66第一篇:编程1. 综述1.1 可编程功能通过编程并运行这些程序而使数控机床能够实现的功能我们称之为可编程功能。
一般可编程功能分为两类:一类用来实现刀具轨迹控制即各进给轴的运动,如直线/圆弧插补、进给控制、坐标系原点偏置及变换、尺寸单位设定、刀具偏置及补偿等,这一类功能被称为准备功能,以字母G以及两位数字组成,也被称为G代码。
另一类功能被称为辅助功能,用来完成程序的执行控制、主轴控制、刀具控制、辅助设备控制等功能。
在这些辅助功能中,Tx x用于选刀,Sx x x x用于控制主轴转速。
其它功能由以字母M 与两位数字组成的M代码来实现。
1.2 准备功能本机床使用的所有准备功能见表1.1:表1.1G代码分组功能*G00 01 定位(快速移动)*G01 01 直线插补(进给速度)G02 01 顺时针圆弧插补G03 01 逆时针圆弧插补G04 00 暂停,精确停止G09 00 精确停止*G17 02 选择X Y平面G18 02 选择Z X平面G19 02 选择Y Z平面G27 00 返回并检查参考点G28 00 返回参考点G29 00 从参考点返回G30 00 返回第二参考点*G40 07 取消刀具半径补偿G41 07 左侧刀具半径补偿G42 07 右侧刀具半径补偿G43 08 刀具长度补偿+G44 08 刀具长度补偿-*G49 08 取消刀具长度补偿G52 00 设置局部坐标系G53 00 选择机床坐标系*G54 14 选用1号工件坐标系G55 14 选用2号工件坐标系G56 14 选用3号工件坐标系G57 14 选用4号工件坐标系G58 14 选用5号工件坐标系G59 14 选用6号工件坐标系G60 00 单一方向定位G61 15 精确停止方式*G64 15 切削方式G65 00 宏程序调用G66 12 模态宏程序调用*G67 12 模态宏程序调用取消G73 09 深孔钻削固定循环G74 09 反螺纹攻丝固定循环G76 09 精镗固定循环*G80 09 取消固定循环G81 09 钻削固定循环G82 09 钻削固定循环G83 09 深孔钻削固定循环G84 09 攻丝固定循环G85 09 镗削固定循环G86 09 镗削固定循环G87 09 反镗固定循环G88 09 镗削固定循环G89 09 镗削固定循环*G90 03 绝对值指令方式*G91 03 增量值指令方式G92 00 工件零点设定*G98 10 固定循环返回初始点G99 10 固定循环返回R点从表1.1中我们可以看到,G代码被分为了不同的组,这是由于大多数的G代码是模态的,所谓模态G代码,是指这些G代码不只在当前的程序段中起作用,而且在以后的程序段中一直起作用,直到程序中出现另一个同组的G代码为止,同组的模态G代码控制同一个目标但起不同的作用,它们之间是不相容的。
00组的G代码是非模态的,这些G代码只在它们所在的程序段中起作用。
标有*号的G代码是上电时的初始状态。
对于G01和G00、G90和G91上电时的初始状态由参数决定。
如果程序中出现了未列在上表中的G代码,CNC会显示10号报警。
同一程序段中可以有几个G代码出现,但当两个或两个以上的同组G代码出现时,最后出现的一个(同组的)G代码有效。
在固定循环模态下,任何一个01组的G代码都将使固定循环模态自动取消,成为G80模态。
1.3 辅助功能本机床用S代码来对主轴转速进行编程,用T代码来进行选刀编程,其它可编程辅助功能由M代码来实现,本机床可供用户使用的M代码列表如下(表1.2):表1.2M代码功能M00 程序停止M01 条件程序停止M02 程序结束M03 主轴正转M04 主轴反转M05 主轴停止M06 刀具交换M08 冷却开M09 冷却关M18 主轴定向解除M19 主轴定向M29 刚性攻丝M30 程序结束并返回程序头M98 调用子程序M99 子程序结束返回/重复执行一般地,一个程序段中,M代码最多可以有一个。
2. 插补功能2.1 快速定位(G00)G00给定一个位置。
格式:G00 IP_;IP_在本说明书中代表任意不超过三个进给轴地址的组合,当然,每个地址后面都会有一个数字作为赋给该地址的值,一般机床有三个或四个进给轴即X,Y,Z ,A所以IP_可以代表如 X12. Y119. Z-37. 或 X287.3 Z73.5 A45. 等等内容。
G00这条指令所作的就是使刀具以快速的速率移动到IP_指定的位置,被指令的各轴之间的运动是互不相关的,也就是说刀具移动的轨迹不一定是一条直线。
G00指令下,快速倍率为100%时,各轴运动的速度:X、Y、Z轴均为15m/min,该速度不受当前F值的控制。
当各运动轴到达运动终点并发出位置到达信号后,CNC认为该程序段已经结束,并转向执行下一程序段。
位置到达信号:当运动轴到达的位置与指令位置之间的距离小于参数指定的到位宽度时,CNC认为该轴已到达指令位置,并发出一个相应信号即该轴的位置到达信号。
G00编程举例:起始点位置为X-50,Y-75. ;指令G00 X150. Y25.;将使刀具走出下图所示轨迹(图2.1)。
图 2.12.2 直线插补(G01)格式:G01 IP-F-;G01指令使当前的插补模态成为直线插补模态,刀具从当前位置移动到 IP指定的位置,其轨迹是一条直线,F-指定了刀具沿直线运动的速度,单位为mm/min(X、Y、Z 轴)。