基于北斗的公安勤务车辆管理系统
一,系统组成
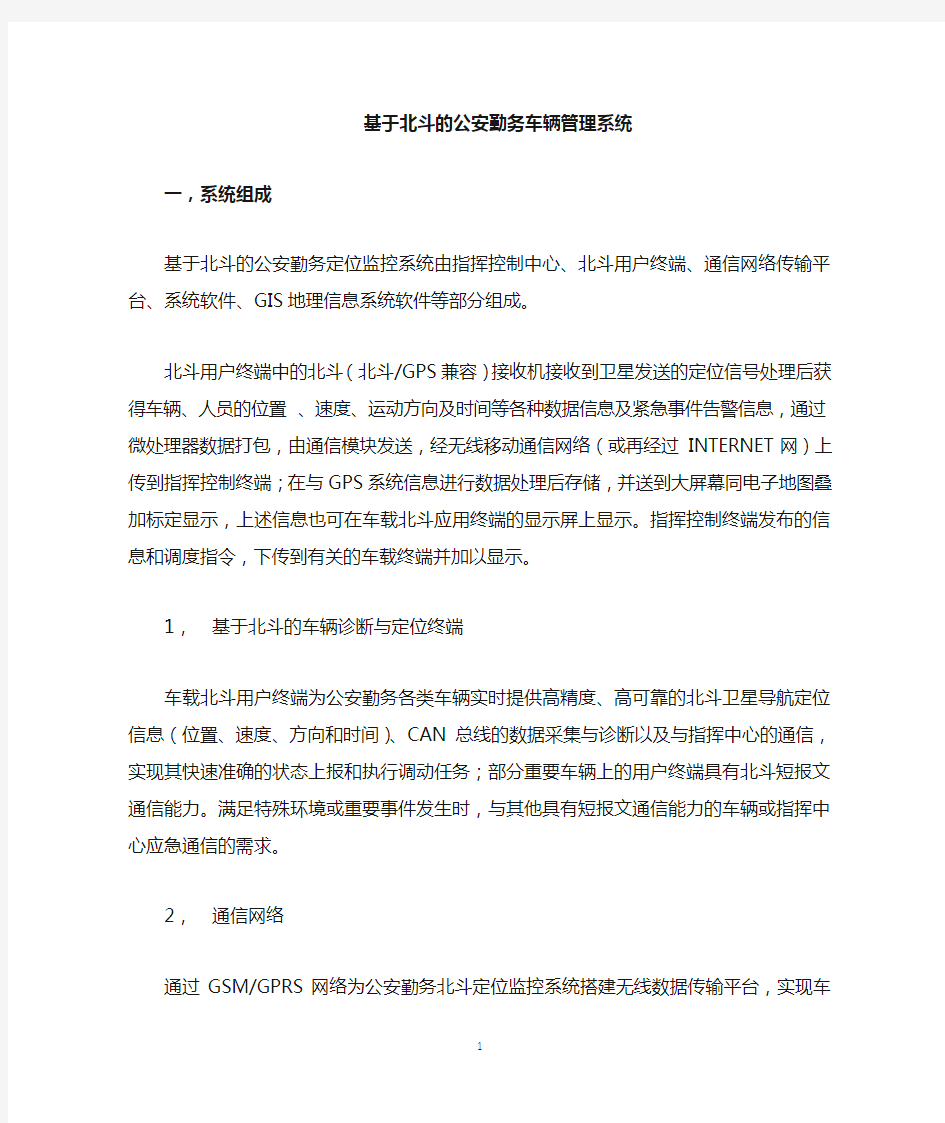
基于北斗的公安勤务定位监控系统由指挥控制中心、北斗用户终端、通信网络传输平台、系统软件、GIS地理信息系统软件等部分组成。
北斗用户终端中的北斗(北斗/GPS兼容)接收机接收到卫星发送的定位信号处理后获得车辆、人员的位置、速度、运动方向及时间等各种数据信息及紧急事件告警信息,通过微处理器数据打包,由通信模块发送,经无线移动通信网络(或再经过INTERNET网)上传到指挥控制终端;在与GPS系统信息进行数据处理后存储,并送到大屏幕同电子地图叠加标定显示,上述信息也可在车载北斗应用终端的显示屏上显示。指挥控制终端发布的信息和调度指令,下传到有关的车载终端并加以显示。
1,基于北斗的车辆诊断与定位终端
车载北斗用户终端为公安勤务各类车辆实时提供高精度、高可靠的北斗卫星导航定位信息(位置、速度、方向和时间)、CAN总线的数据采集与诊断以及与指挥中心的通信,实现其快速准确的状态上报和执行调动任务;部分重要车辆上的用户终端具有北斗短报文通信能力。满足特殊环境或重要事件发生时,与其他具有短报文通信能力的车辆或指挥中心应急通信的需求。
2,通信网络
通过GSM/GPRS网络为公安勤务北斗定位监控系统搭建无线数据
传输平台,实现车辆实际位置、速度、运行方向等信息上报指挥中心,并传输指挥中心对车辆进行监控、管理和调度指令。
二,基于北斗/GPS的公安勤务车在北斗中的功能实现如下:
1,智能预案管理,实时警力目标的实时定位监控,指挥部门可实时掌握警力部署情况,根据事发地点就近调动部署警力,
实现快速反映、精确指导、精确打击,实现勤务工作时间上的
“零缝隙”和指挥调度空间上的“零距离”,大大提高警务工
作效率。
2,实现特殊环境下的警用目标定位跟踪,利用北斗导航系统提供的短报文通信功能,可以将定位目标卫星信息通过卫星通
路实时回传指挥中心,解决特殊环境下位置信息回传没有通信
链路的问题,保障指挥控制中心对定位目标的掌控。
3,结合警用地理信息系统,指挥控制中心根据警力目标位置,迅速掌握事发地周边的人、地、物、事、组织情况,同时调动
周边视频监控资源,使指挥人员及时掌控事发地周边整体态势,
为警务指挥决策提供科学依据。
4,警用车辆巡逻及出警管理;偏离线路报警、偏离区域报警、一个班次巡逻次数的监控、巡逻时间的监控、岗位考勤监督管理;利用北斗/GPS定位系统将车辆实施定位数据及执法终端定位数据回传到指挥中心并作数据存储,保证指挥控制中心可动态掌控警力在岗实际情况,改变以往由各单位上报警力部署,而指挥部门无法实施有效监督的现状,利用高新技术手段实现了“机器管人,机器帮人”
5,实现重大自然灾害时的应急通信保障,由于目前警用指挥调度系统大部分基于地面通信网进行建设,当发生重大自然灾害地面通信网受损时,可以利用北斗短报文功能,第一时间进行警情警令的上传下达,为极端恶劣条件下的应急指挥通信提供安全可靠的手段。
6,里程及油耗统计;统计单位时间内的里程,同时根据里程算出油耗,防止偷油及公车私用。
7,警用车辆身份认证,确认驾驶人身份信息及驾驶权限。
网址:https://www.doczj.com/doc/f85184154.html, 北斗gps卫星定位系统定位原理 北斗卫星定位系统哪家好?北斗卫星定位系统的原理是什么?八杰科技为您解答。 定位原理 35颗卫星在离地面2万多千米的高空上,以固定的周期环绕地球运行,使得在任意时刻,在地面上的任意一点都可以同时观测到4颗以上的卫星。 由于卫星的位置精确可知,在接收机对卫星观测中,我们可得到卫星到接收机的距离,利用三维坐标中的距离公式,利用3颗卫星,就可以组成3个方程式,解出观测点的位置(X,Y,Z)。考虑到卫星的时钟与接收机时钟之间的误差,实际上有4个未知数,X、Y、Z和钟差,因而需要引入第4颗卫星,形成4个方程式进行求解,从而得到观测点的经纬度和高程。 事实上,接收机往往可以锁住4颗以上的卫星,这时,接收机可按卫星的星座分布分成
网址:https://www.doczj.com/doc/f85184154.html, 若干组,每组4颗,然后通过算法挑选出误差最小的一组用作定位,从而提高精度。 卫星定位实施的是“到达时间差”(时延)的概念:利用每一颗卫星的精确位置和连续发送的星上原子钟生成的导航信息获得从卫星至接收机的到达时间差。 卫星在空中连续发送带有时间和位置信息的无线电信号,供接收机接收。由于传输的距离因素,接收机接收到信号的时刻要比卫星发送信号的时刻延迟,通常称之为时延,因此,也可以通过时延来确定距离。卫星和接收机同时产生同样的伪随机码,一旦两个码实现时间同步,接收机便能测定时延;将时延乘上光速,便能得到距离。 每颗卫星上的计算机和导航信息发生器非常精确地了解其轨道位置和系统时间,而全球监测站网保持连续跟踪。 卫星导航原理 踪卫星的轨道位置和系统时间。位于地面的主控站与其运控段一起,至少每天一次对每颗卫星注入校正数据。注入数据包括:星座中每颗卫星的轨道位置测定和星上时钟的校正。这些校正数据是在复杂模型的基础上算出的,可在几个星期内保持有效。 卫星导航系统时间是由每颗卫星上原子钟的铯和铷原子频标保持的。这些星钟一般来讲精确到世界协调时(UTC)的几纳秒以内,UTC是由美国海军观象台的“主钟”保持的,每台主钟的稳定性为若干个10^-13秒。卫星早期采用两部铯频标和两部铷频标,后来逐步改变为更多地采用铷频标。通常,在任一指定时间内,每颗卫星上只有一台频标在工作。 卫星导航原理:卫星至用户间的距离测量是基于卫星信号的发射时间与到达接收机的时间之差,称为伪距。为了计算用户的三维位置和接收机时钟偏差,伪距测量要求至少接收来自4颗卫星的信号。
基于北斗卫星系统精确定位的关键技术研究北斗卫星导航系统是我国自主建设的基础性定位导航系统,无论从国家的军事安全还是社会经济效益考虑,都使得我国有更加长远的发展。近年来,我国北斗系统的组建正在一步步完善,服务范围也随之扩大,北斗系统及其相关产品的使用已经越来越深入到人们的日常生活中,对提高国民经济和推动社会发展有着重大的意义。 关于北斗卫星精确定位相关技术的研究也越来越重要,本文对北斗精确定位中的伪距定位和载波相位数据中周跳的相关问题进行分析和讨论,主要的研究工作内容如下:(1)在精确定位中,利用伪距定位技术对接收机的位置作初始定位,首先分析了北斗伪距定位的原理,研究了伪距定位的相关算法,用最小二乘定位解算法对接收机的位置定位,又采用扩展卡尔曼滤波定位算法做位置解算,两种方法均有线性误差存在。(2)北斗定位系统的解算模型具有非线性特点,研究了无迹卡尔曼滤波方法,验证了其定位解算的结果较好,优势明显。 对于定位中存在的噪声特性未知或者不确定的情况,本文提出了一种具有自适应性的无迹卡尔曼算法来解算,在传统的滤波定位算法的基础上,通过噪声估计器对接收机定位过程中的噪声做出实时估计,具有很好的定位效果,且有较强的和收敛性。(3)对于北斗卫星系统载波相位数据中存在的周跳问题,首先对传统的经典探测方法做出了验证,探讨了经典方法对不同类型周跳的探测性能。 对三频载波相位中存在的组合周跳探测特性作了研究,和一般的单频双频数据的探测方法相比较,三频数据组合探测周跳的方法在探测范围上的选择性更大,且探测的准确度也更高。(4)本文采用伪距相位与三频相位GF-IF法联合探测的方法,后者方法能够消除载波观测数据中电离层和伪距带来的误差,根据两种方
北斗、Galileo、GLONASS、GPS定位导航系统对比 世界有四大定位导航系统,分别是中国的北斗卫星定位系统、欧盟的Galieo、俄罗斯的GLONASS、美国人的GPS定位系统。 1.GPS 2.GLONASS全球导航卫星系统 GLONASS的起步晚于GPS9年。从前苏联 1982年10月12日发射第一颗GLONASS卫星开始,到1996年,13年时间内历经周折,虽然遭遇了苏联的解体,由俄罗斯接替部署,但始终没有终止或中断GLONASS卫星的发射。1995年初只有16颗GLONASS卫星在轨工作,1995年进行了三次成功发射,将9颗卫星送入轨道,完成了24颗工作卫星加1颗备用卫星的布局。经过数据加载、调整和检验,已于 1996年1月18日.整个系统正常运行。 1卫星星座 GLONASS卫星星座的轨道为三个等间隔椭圆轨道,轨道面间的夹角为120度,轨道倾角 64.8度,轨道的偏心率为o.01,每个轨道上等间隔地分布8颗卫星。卫星离地面高度19100km,绕地运行周期约11小时15分,地迹重复周期8天,轨道同步周期17困。 由于GLONASS卫星的轨道倾角大于GPS卫星的轨道倾角,所以在高纬度(50度以上)地区的可视性较好。 每颗GLONASS卫星上装有艳原子钟以产生卫星上高稳定时标,并向所有星载设备的处理提供同步信号。星载计算机将从地面控制站接收到的专用信息进行处理,生成导航电文向用户广播。导航电文包括:
①星历参数;②星钟相对于GLONASS时的偏移值;③时间标记; ④GLONA SS历书。 GLONASS卫星向空间发射两种载波信号。L1频率为 1.602— 1.616MHz.L2频率为 1.246— 1.256MHz为民用,L2供军用。 2.地面探制系统 地面控制站组包括一个系统控制中心,一个指令跟踪站,网络分布于俄罗斯境内。 CTS跟踪着GLoNAs5可视卫星,它遥测所有卫星,进行测距数据的采集和处理,并向各卫星发送控制指令和导航信息。 3用户设备 接收GUNASS卫星信号并测量其伪距和速度,同时从卫星信号中选出并处理导航电文。 接收机中的计算机对所有输入数据处理并算出位置坐标的三个分旦、速度矢量的三个分量和时间。利用两个独立的卫星定位系统进行导航和定位测量,可有效地削弱美俄两国对各自定位系统的可能控制,提高定位的可靠性和安全性。 4伐罗斯联邦政府对GLONA5S系统的使用政策 早在1991年俄罗斯首先宣称;GLoNAs5系统可供国防民间使用、不带任何限制,也不计划对用户收费.该系统将在完全布满星座后遵照已公布的性能运行至少15年。民用的标准精度通道(csA)精度数据为:
北斗卫星定位系统工作原理 北斗卫星定位系统是全球卫星定位系统的一种,他工作的基本原理是测量出已知位置的卫星到用户接收机之间的距离,然后综合多颗卫星的数据就可知道接收机的具体位置。要达到这一目的,卫星的位置可以根据星载时钟所记录的时间在卫星星历中查出。而用户到卫星的距离则通过纪录卫星信号传播到用户所经历的时间,再将其乘以光速得到(由于大气层电离层的干扰,这一距离并不是用户与卫星之间的真实距离,而是伪距(PR):当北斗卫星行为系统的卫星正常工作时,会不断地用1和0二进制码元组成的伪随机码(简称伪码)发射导航电文。北斗卫星定位系统使用的伪码一共有两种,分别是民用的C/A码和军用的P(Y)码。C/A码频率1.023MHz,重复周期一毫秒,码间距1微秒,相当于30 0m;P码频率10.23MHz,重复周期266.4天,码间距0. 1微秒,相当于30m。而Y码是在P码的基础上形成的,保密性能更佳。导航电文包括卫星星历、工作状况、时钟改正、电离层时延修正、大气折射修正等信息。它是从卫星信号中解调制出来,以50b/s调制在载频上发射的。导航电文每个主帧中包含5个子帧每帧长6s。前三帧各10个字码;每三十秒重复一次,每小时更新一次。后两帧共15000b。导航电文中的内容主要有遥测码、转换码、第1、2、3数据块,
其中最重要的则为星历数据。当用户接受到导航电文时,提取出卫星时间并将其与自己的时钟做对比便可得知卫星与用户的距离,再利用导航电文中的卫星星历数据推算出卫星发射电文时所处位置,用户在WGS-84大地坐标系中的位置速度等信息便可得知。可见北斗卫星定位系统卫星部分的作用就是不断地发射导航电文。然而,由于用户接受机使用的时钟与卫星星载时钟不可能总是同步,所以除了用户的三维坐标x、y、z外,还要引进一个Δt即卫星与接收机之间的时间差作为未知数,然后用4个方程将这4个未知数解出来。所以如果想知道接收机所处的位置,至少要能接收到4个卫星的信号。 工作原理1 北斗卫星定位系统接收机可接收到可用于授时的准确至纳秒级的时间信息;用于预报未来几个月内卫星所处概略位置的预报星历;用于计算定位时所需卫星坐标的广播星历,精度为几米至几十米(各个卫星不同,随时变化);以及北斗卫星定位系统信息,如卫星状况等。 北斗卫星定位系统接收机对码的量测就可得到卫星到接收机的距离,由于含有接收机卫星钟的误差及大气传播误差,故称为伪距。对0A码测得的伪距称为UA码伪距,精
基于北斗的车辆监控调度系统 解决方案 北京国翼恒达导航科技有限公司
目录 1系统概述 (1) 2系统建设目标 (1) 3系统总体设计 (2) 3.1 系统总体结构 (2) 3.2 系统组成 (3) 4车辆监控管理平台分系统设计 (3) 4.1 车辆实时监控管理软件 (3) 4.1.1 地图服务 (3) 4.1.2 车辆位置监控 (4) 4.1.3 车辆轨迹回放 (4) 4.1.4 车辆状态监控 (5) 4.1.5 车辆报警管理 (5) 4.1.6 车辆指挥调度 (6) 4.1.7 车辆统计分析 (6) 4.1.8 系统管理 (7) 4.2 北斗指挥机 (7) 5智能车载终端分系统设计 (7) 5.1 北斗RDSS车载终端 (8) 5.1.1 产品功能 (8) 5.1.2 产品技术指标 (8) 5.1.3 产品结构特征 (10) 5.2 导航仪 (11) 5.2.1 产品性能指标 (11) 5.2.2 产品结构特征 (12) 5.3 嵌入式软件 (13) 6 系统预算 (14)
1系统概述 在不同行业领域的应用中,车辆不再简单充当运输载体,车辆管理部门往往把车辆作为一个信息点对其进行数据采集跟踪指挥布控。在现阶段,车辆监控普遍采用GPS(全球定位系统)与其他通信系统相结合的方式,实现对车辆监控的要求。但是采用这种车辆监控方式也存在着诸多的弊端,如在移动基站信号覆盖弱的地方,通信成功率低、车队之间无法远距离通信、上级管理部门无法指挥调度等问题,都将影响监控系统的稳定可靠性。北斗卫星导航系统是我国自行研制开发的全球卫星定位与通信系统,随着我北斗二代系统投入使用,北斗系统运用于各特种车辆及重点车辆监控,是必然的发展趋势。 基于北斗的车辆监控调度系统将北斗卫星导航定位技术、GIS地理信息系统技术、互联网技术有机结合,针对不同类型车辆如危化品运输车、客运车、政府部门车辆及各种特种车辆如警用车、运钞车、消防车,救护车、邮政车、工程抢险车等,可提供系统监控中心的整体解决方案。监控中心通过北斗卫星网络,能够实现全天候网络无缝覆盖获取车辆的地理位置、运行方向、运行速度及各种状态信息,对车辆进行实时监控、调度、发布服务信息、受理各种类型的报警信息等。本系统扩展性强,配置灵活方便,规模可大可小,监控中心可适应小到几辆车,大到数万辆车的监控和管理。 2系统建设目标 基于北斗的车辆监控调度系统以北斗卫星导航系统作为车辆定位和监控调度及监控中心与车辆间通信的支持平台。本系统能够在广阔疆域全天候、无缝隙、
北斗卫星导航定位系统,是中国自行研制开发的区域性有源三维卫星定位与通信系统(CNSS),是除美国的全球定位系统(GPS)、俄罗斯的GLONASS之后,第三个成熟的卫星导航系统。卫星导航系统是重要的空间基础设施,它综合了传统天文导航定位和地面无线电导航定位的优点,相当于一个设置在太空的无线电导航台,可带来巨大的社会经济效益。在测绘、电信、水利、公路交通、铁路运输、渔业生产、勘探、森林防火和国家安全等诸多领域会逐步发挥重要作用。 世界上第一个全球卫星导航系统是美国从1973年开始实施的GPS系统,军民两用。但长期以来,美国对本国军方提供的是精确定位信号,对其他用户提供的则是加了干扰的低精度信号――也就是说,地球上任何一个目标的准确位置,只有美国人掌握,其他国家只知道个“大概”。为打破美国的垄断,俄罗斯耗资30多亿美元建起了自己的全球卫星导航系统GLONASS。2002年,欧盟启动了伽利略(Galileo)全球卫星导航定位系统计划,将在2008年投入运营,预计投资36亿欧元。2003年,我国与欧盟签署了有关伽利略计划的合作协定,目前双方合作项目已有14个。我国自上世纪80年代引进首台GPS接收机以来,已成为GPS应用大国。作为一个拥有广阔领土和海域的国家,中国有能力也有必要拥有自己的全球定位系统。 北斗卫星导航定位系统的系统构成有:由两颗地球静止卫星(800E和1400E)、一颗在轨备份卫星(110.50E)、中心控制系统、标校系统和各类用户机等部分组成。可向用户提供全天候、二十四小时的即时定位服务,定位精度可达20纳秒的同步精度,水平精度100米(1σ),设立标校站之后为20米(类似差分状态)。其精度与GPS相当。工作频率为2491.75MHz,系统容纳的最大用户数达每小时540000户,短报文通信一次可传送多达120个汉字的信息(GPS不具备此项功能),精密授时的精度达20纳秒。 2007年2月3日,第四颗试验“北斗星”在西昌成功发射。 这一系统目前共有四颗导航定位卫星,其发射时间分别为: 2000年10月31日; 2000年12月21日; 2003年5月25日,第三颗是备用卫星。 2007年2月3日,北斗导航试验卫星升空。 中国向着努力开发一个堪与美国GPS系统和欧洲伽利略系统(Galileo)媲美的定位系统又迈进了一步。“北斗”导航卫星通过“长征三号甲”运载火箭成功发射,凸显中国政府发展航天工业的决心。此前数周,中国用一种由导弹发射的“动能拦截器”击毁了一颗老化气象卫星,美国对此表示担忧。 北斗卫星导航定位系统——英文名为“Compass”——的计划一直处于保密状态,官方一再拒绝透露意图。不过,最近的卫星发射,似乎是要加强一个相对不很精确的系统,该系统以2000年至2003年发射的三颗北斗卫星为基础。今年初将发射两颗地球静止卫星,使北斗卫星导航系统到2008年能够覆盖中国全境和邻近国家部分区域。北斗卫星导航系统最终将通过由30颗非静止轨道卫星组成的卫星“星座”,扩展到覆盖全球。它将类似于美国的GPS系统(全球定位系统)和欧洲的伽利略卫星网络。 更为精确的定位,对于中国军队来说将是一项重大财富。扩展后的北斗卫星导航系统,将使用与伽利略系统相同的无线电频率,可能也会与GPS系统相同,在战时使敌方更难以干扰网络。 北斗卫星导航系统的开发,可能会对伽利略系统的商业成功构成挑战。虽然中国是伽利略项目的合作方之一,中国政府和企业在相关设施及商业应用研究方面投入了2亿欧元(合2.6亿美元),但中国正成为该 项目的一个潜在竞争者。
xxxx导航系统定位原理及其应用 北斗卫星定位系统是由中国建立的区域导航定位系统。该系统由四颗(两颗工作卫星、2颗备用卫星)北斗定位卫星(北斗一号)、地面控制中心为主的地面部份、北斗用户终端三部分组成。北斗定位系统可向用户提供全天候、二十四小时的即时定位服务,授时精度可达数十纳秒(ns)的同步精度,北斗导航系统三维定位精度约几十米,授时精度约100ns。美国的GPS三维定位精度P码目前己由16m提高到6m,C/A码目前己由25-100m提高到12m,授时精度日前约20ns。。 北斗一号导航定位卫星由中国空间技术研究院研究制造。四颗导航定位卫星的发射时间分别为: 2000年10月31日; 2000年12月21日; 2003年5月25日, 2007年4月14日,第三、四颗是备用卫星。2008年北京奥运会期间,它将在交通、场馆安全的定位监控方面,和已有的GPS卫星定位系统一起,发挥?双保险?作用。北斗一号卫星定位系统的英文简称为BD,在ITU(国际电信联合会)登记的无线电频段为L波段(发射)和S波段(接收)。北斗二代卫星定位系统的英文为Compass(即指南针),在ITU登记的无线电频段为L波段。北斗一号系统的基本功能包括: 定位、通信(短消息)和授时。北斗二代系统的功能与GPS相同,即定位与授时。 其工作原理如下: ?北斗一号?卫星定位系出用户到第一颗卫星的距离,以及用户到两颗卫星距离之和,从而知道用户处于一个以第一颗卫星为球心的一个球面,和以两颗卫星为焦点的椭球面之间的交线上。另外中心控制系统从存储在计算机内的数字化地形图查寻到用户高程值,又可知道用户出于某一与地球基准椭球面平行的椭球面上。从而中心控制系统可最终计算出用户所在点的三维坐标,这个坐标
北斗卫星导航系统测量型终端通用规范(预) 2014.08.14 1 范围 本标准规定了北斗卫星导航系统测量型终端(以下简称北斗测量型终端)的技术要求、检验方法、检验规则以及标志、包装、运输和贮存等。 本标准适用于利用载波相位观测值进行静态测量、后处理动态测量、RTK测量的北斗测量型终端的研制、生产和使用。 2 规范性引用文件 下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。 ?GB/T 191 包装储运图标志 ?GB/T 2828.1—2003 计数抽样检验程序第1部分:按接收质量限(AQL)检索的逐批检验抽样计划 ?GB 4208—2008 外壳防护等级(IP代码) ?GB/T 4857.5 包装运输包装件跌落试验方法 ?GB/T 5080.1—1986 设备可靠性试验总要求 ?GB/T 5080.7—1986 设备可靠性试验恒定失效率假设下的失效率与平均无故障时间的验证试验方案 ?GB/T 5296.1—1997 消费品使用说明总则 ?GB/T 6388 运输包装收发货标志 ?GB 9254—2008 信息技术设备的无线电骚扰限值和测量方法 ?GB/T 9969—2008 工业产品使用说明书总则 ?GB/T 12267-1990 船用导航设备通用要求和试验方法 ?GB/T 12858-1991 地面无线电导航设备环境要求和试验方法 ?GB/T 13384—2008 机电产品包装通用技术条件 ?GB/T 15868—1995 全球海上遇险与安全系统(GMDSS)船用无线电设备和海上导航设备通用要求、测试方法和要求的测试结果 ?GB/T 16611—1996 数传电台通用规范 ?GB/T 17626.3—2006 电磁兼容试验和测量技术射频电磁场辐射抗扰度试验 ?GB/T 19391—2003 全球卫星定位系统(GPS)术语及定义 ?GB/T 20512 GPS接收机导航定位数据输出格式
车辆G P S/北斗定位监控方案 河北任安电子科技有限公司 2014年7月20日 目录
一、概述 北斗系统是自行研制的全球与(BDS),是继美(GPS)和俄之后第三个成熟的。系统由空间端、地面端和用户端组成,可在全球范围内全天候、全天时为各类用户提供高精度、高可靠定位、导航、授时服务,并具短报文通信能力,已经初步具备区域导航、定位和授时能力,定位精度高,授时精度高。2012年12月27日,北斗系统空间信号接口控制文件正式版1.0正式公布,北斗导航业务正式对亚太地区提供无源定位、导航、授时服务。北斗卫星导航系统和、格洛纳斯系统及欧盟一起,是卫星导航委员会已认定的供应商。 采用BD2B1/GPS/北斗L1双模模块,实现北斗/GPS/北斗双模卫星定位监控,结合汽车行驶记录?仪,信息显示屏,TF卡存储,打印机,驾驶员IC卡身份识别,语音通话,多媒体监控存储,多种数据接口。汽车标准安装嵌入式结构设计,一体化结构。完全符合国标GB-T19056-2012/?部标JT/T794-2011标准和交通部《道路运输车辆卫星定位系统北斗兼容车载终端技术规范》的要求。适合于交通部推广客车、货车和危险品车北斗应用的要求。
1.1系统设计目标及原则 1.1.1系统设计目标 通过对GPS/北斗应用需求的认真分析与仔细研究,确定以下设计目标: 车辆监控平台与TMS之间无缝对接,能够实现车辆状态实时查询,提升客户满意度。系统设计为各类车辆分别提供各种专有报表,系统统采用分组管理,不同类型的车辆归入不同分组,便于管理。保证系统安全的前提下采用国际通用的系统规范、传输协议和子系统接口,能比较容易的实现与其他系统的网络连接和数据共享以及系统扩容。 1.1.2系统设计原则 系统设计必须遵循以下原则: 1)经济高效性。技术方案设计充分考虑市场经济原则,既有利于车辆的安全方便管 理,又有利于降低系统投资成本,特别是运营成本,能够充分考虑主控中心的市场化经营模式。 2)系统的开放性。系统设计遵循开放性原则,能够支持多种硬件设备和网络系统,并 支持二次开发。 3)系统的继承性。最大限度利用原有部分设备,充分利用已有硬件设备和网络资源。 4)系统的可扩展性。对系统终期容量及网络发展设想进行方案设计,实现平滑扩容。 对于不同的通信平台,只需要在主控中心分别设置一台前置设备进行数据交换即可实现连接。降低系统维护升级的复杂程度,提高系统更新、维护、升级的效率。 5)系统安全性。在互联网络中,防止非法用户享受服务,防止计算机病毒的入侵,总 体方案中提出了对车辆智能调度系统的闭环检测及网管方案。实现对整个网络的实时监控。软件设计及数据调度中采用纠错冗余技术,保证系统安全及准确性。
北斗三频差分定位关键算法研究与实现北斗卫星导航系统是中国自行研制的全球卫星导航系统,不同于美国的GPS 系统和俄罗斯的GLONASS系统,北斗系统还是全球首个具备全星座播发三种频率卫星导航信号能力的卫星导航系统。多频观测值是未来全球卫星导航系统发展的趋势,多频观测值的出现不仅极大地增加了多余观测值,提高了卫星定位系统的稳定性和可靠性,同时更意味着可以形成更多性质优良的组合观测值,这些组合观测值一般都具有较长的波长,同时其电离层延迟及组合噪声较小,利用这些组合观测值可以显著提高导航定位的精度。 鉴于多频观测值的诸多优势,开展对北斗三频组合定位算法的研究有着十分重要的现实意义。本文重点研究了北斗三频观测值组合理论、基于三频观测值的三频周跳探测算法和三频模糊度解算算法以及基于奇异谱分析法的北斗恒星日滤波算法,主要研究工作如下:(1)从北斗系统观测方程出发,推导了三频组合观测值的观测方程及其各项误差的表达式,并分析了各项误差之间的关系,最后以波长、电离层延迟以及观测噪声为标准选取了最优整系数线性组合,结果表明:满足较长波长并且电离层延迟和观测噪声较小的组合观测值其系数之和等于零;(2)研究了两种基于三频观测值的周跳探测与修复方法:伪距相位组合法和无几何相位组合法。 介绍了两种方法的周跳探测原理,然后分析了两种周跳探测方法各自存在的局限性,并针对伪距相位组合法探测周跳时容易受到电离层延迟影响的不足,提出了一种新的顾及伪距组合系数的弱电离层周跳探测方法。首先在构造周跳检测量时通过设定伪距相位组合的电离层延迟系数阈值并以周跳估值的标准差最小为原则搜索得到具有最小电离层延迟系数的伪距相位组合系数,筛选出的伪距相
北斗GPS卫星导航系统 建 设 方 案 贵州迪辰安信科技发展有限公司 二〇一三年五月
目录 目录 (2) 第一章建设背景 (4) 第二章北斗GPS卫星导航系统简介 (7) 2.1、什么北斗卫星导航系统 (7) 2.2、北斗卫星定位原理 (8) 2.3、北斗卫星工作原理图 (8) 2.3、北斗GPS卫星导航技术指标 (9) 第二章系统设计原则 (10) 第三章系统总体设计 (11) 3.1系统架构 (11) 3.2 技术架构 (12) 3.3 平台运行环境配置 (13) 3.4 服务端程序平台 (13) 3.5 GPS数据接入公安内网 (14) 3.6 北斗GPS监控客户端功能设计 (14) 3.7系统安全 (19) 第四章项目实施 (21) 4.1实施进度 (21) 4.2实施和验收方法 (21) 4.2.1项目的实施 (21) 4.2.2项目的验收 (21) 4.3项目管理及质量控制 (22) 4.3.1项目责任制 (22) 4.3.2项目质量控制 (22) 第五章运行维护体系 (23) 5.1系统的维护 (23) 第六章经费预算 (24) 6.1 硬件配置及费用预算 (24)
6.2 软件系统费用预算 (24)
第一章建设背景 1. 概述 随着我市城市建设规模的扩大,车辆日益增多,交通运输的经营管理和合理调度,警用车辆的指挥和安全管理已成为公安、交通系统中的一个重要问题。过去,用于交通管理系统的设备主要是无线电通信设备,由调度中心向车辆驾驶员发出调度命令,驾驶员只能根据自己的判断说出车辆所在的大概位置,而在生疏地带或在夜间则无法确认自己的方位甚至迷路。因此,从调度管理和安全管理方面,其应用受到限制。北斗GPS定位技术的出现给车辆、轮船等交通工具的导航定位提供了具体的实时的定位能力。通过车载GPS接收机使驾驶员能够随时知道自己的具体位置。通过车载电台将GPS定位信息发送给调度指挥中心,调度指挥中心便可及时掌握各车辆的具体位置,并在大屏幕电子地图上显示出来。目前,用于公安、交通系统的主要是车辆GPS定位与无线通信系统相结合的指挥管理系统。 2. 车辆GPS定位管理系统 车辆GPS定位管理系统主要是由车载GPS自主定位,结合无线通信系统对车辆进行调度管理和跟踪。已经研制成功的如车辆全球定位报警系统,警用GPS 指挥系统等。分别用于城市公共汽车调度管理,风景旅游区车船报警与调度,海关、公安、海防等部门对车船的调度与监控。监控中心部分的主要功能有:?数据跟踪功能。将移动车辆的实时位置以贞列表的方式显示出来。如车号、经度、速度、航向、时间、日期等
北斗卫星定位车载终端技术方案 三、技术原理 北斗卫星导航系统是中国自行研制开发的区域性有源三维卫星定位与通信系统(CNSS),是除美国的全球定位系统(GPS)、俄罗斯的GLONASS之后第三个成熟的卫星导航系统。北斗卫星导航系统为用户提供高质量的定位、导航和授时服务,其建设与发展则遵循开放性、自主性、兼容性、渐进性。北斗卫星定位车载终端采用了多模块化、组合式优化设计,内置高性能芯片,各模块之间的接口采用标准接口,充分利用系统平台、移动通讯网络、因特网络,将汽车行驶记录仪、卫星定位、卫星导航、油耗检测功能集于一体,通过无线数据通讯接口(GSM、GPRS、CDMA)和GPS接口,能与监控中心系统进行数据通信和移动位置的定位,能够满足用户的多种需求。 除具有传统行驶记录仪的功能外增加了定位导航、监控跟踪、数据实时传送、油耗检测等功能,并且能够实现对车辆实时监管、调度,遇险报警远程网络监控,彻底改变了现有汽车行驶记录仪只能实地监管、事后监督的弊端;GPS/北斗2双模卫星定位模块,可以灵活配置信号处理通道工作于单GPS模式,或单北斗2模式,或GPS/北斗2混合模式;兼容目前现有的GPS单模定位,且能实现双模捕获、双模跟踪更加智能化、集成化。因此,基于以上原理设计的卫星车载终端监控系统,大大超出了传统行驶记录仪的功能,具有极为光明的发展前景。 四、设计方案 (一)设计原则 1、先进性和适用性相结合 系统采用成熟的高新科技,以目前较为先进的方法实现需要的功能,保证系统具有深厚的发展潜力,在相当长的时间内具有领先水平。 2、通用性和安全性相结合 在系统设计过程中,均留有相应的通信接口,系统的各个模块构成一个有机的整体。系统数据库中的各种数据在交换和共享的过程中,充分考虑到了系统的安全性。对每一个用户的权限有严格的认证(司机卡身份识别)体制,对每一个用户的权限进行分级控制和限定。
ISSN 1000-0054CN 11-2223/N 清华大学学报(自然科学版)J T singh ua Un iv (Sci &Tech ),2009年第49卷第1期 2009,V o l.49,N o.1w 13 http://qhx bw.chinajo https://www.doczj.com/doc/f85184154.html, 北斗无源定位的虚拟卫星算法 刘家兴, 陆明泉, 崔晓伟, 冯振明 (清华大学电子工程系,北京100084) 收稿日期:2007-10-16 作者简介:刘家兴(1981—),男(汉),北京,博士研究生。通讯联系人:冯振明,教授,E-mail:fz m@tsingh https://www.doczj.com/doc/f85184154.html, 摘 要:为了解决现有的气压高度计辅助卫星定位算法计算繁琐或者难于分析定位精度的问题,该文提出虚拟卫星定位算法。该算法根据用户的位置估计值生成一颗“虚拟”卫星,对应的“虚拟”伪距由气压高度计提供,结合用户的可见卫星和测得的伪距来更新用户的位置估计值,反复执行上述过程直至收敛。该算法计算步骤简单,可直接进行定位精度分析。将该算法应用于北斗三星无源定位当中,仿真结果表明:设定气压测高误差标准差为8m,则中国及邻近地区的位置精度因子为8.8至22.4;在清华大学校园进行的静态测试显示,在各个历元上迭代过程只有4~9次,定位均方根误差为42.7m 。 关键词:虚拟卫星定位;北斗无源定位;气压高度计;定位 精度 中图分类号:T N ;T U 2 文献标识码:A 文章编号:1000-0054(2009)01-0049-04 Virtual satellite algorithm for Beidou passive positioning LIU Jiaxing ,LU Mingquan ,CUI Xiaowei ,FENG Zh enming (Department of Electronic Engineering ,Tsinghua University , Beij ing 100084,China ) Abstract :Curr ent satellite pos itioning alg orith ms that rely on barometric altimeters are either complex or have d ifficu lty to analyze positioning accuracies. T his paper presents a virtual s atellite positioning algorithm that gen erates a “virtual ”s atellite based on the user ’s estim ated position us ing the “virtual ”ps eudorange provided by the barometer.T he user ’s estimated position is iteratively renew ed based on the real and virtual s atellite ps eud or anges until convergen ce.Th e alg or ith m s implifies the computations and can accur ately analyze the positioning.Ap plication of the algorithm to passive pos itioning w ith th ree Beid u geostationary satellites show s that the position dilu tion of the p recision factor ranges from 8.8to 22.4across China and near by regions if the barometr ic altitude error is 8m.A static test on the T singh ua University campus show s that only 4to 9iterations are requ ired for each ep och,and that the root-mean-squ are pos ition ing error is 42.7m. Key words :virtual satellite positionin g;b eidou pass ive positioning ; barometr ic altim eter ;positionin g accuracy “北斗一号”卫星定位系统是中国自主研发的全天候、区域性、具备较高精度的卫星定位系统[1] 。它由3颗地球同步卫星、地面控制中心、标校系统和各 种用户机组成。它采用两颗地球静止轨道卫星以双向测距结合数字地图实现主动式的有源定位[2],定位结果在地面控制中心完成,然后通过卫星转发至用户机。相比全球定位系统(GPS)采用的被动定位方式,主动式定位有如下缺点:用户的数量有限;用户的服务频度受到制约;定位结果的实时性差;定位精度不理想;在军事应用中其用户更容易暴露目标。如果利用气压高度计辅助已有的3颗北斗卫星实现被动式定位,则上述问题可以迎刃而解。 某些时候GPS 也需要气压高度计辅助,用以解决由遮挡造成的可见卫星数目不足的问题,从而提高可用性和连续性。 文[3]给出一种气压高度计辅助GPS 的定位算法,它基于本地用户(NED)坐标系,必须对所有坐标点反复进行从地心地固(ECEF )坐标系到NED 坐标系的转换,计算的复杂度较高。文[4-6]介绍了北斗无源定位算法。文[4]利用气压测高增建一个关于接收机的近似椭球方程,该方法不适于计算精度因子(DOP ),根源在于定位解算线性方程组的常数误差量并不服从相同分布。文[5]利用气压测高消去ECEF 的z 坐标,因此给出的位置精度因子(PDOP)(7~9)略小于真实值。文[6]则缺乏足够的定位精度分析。 本文提出虚拟卫星定位算法。该算法计算简洁,便于精度分析。在北斗三星无源定位的应用中,提供一些具有参考价值的仿真结果和静态测试结果。
北斗导航定位系统如何定位和通信 对于北斗导航,目前来说只有行业相关的人对此导航系统有所了解,普通人们在生活中了解的并不多,这主要是因为人们普遍使用gps导航系统,北斗导航定位系统普及性比较低,所以人们知道了解的并不多。但是,北斗导航定位系统,目前正在不断的向前发展,不管是专业领域的发展,也在不停的向民用领域延伸发展。 1、北斗导航定位系统的组成 北斗导航定位系统是自主研发的全球四大导航之一,此系统主要是由空间端、地面端和用户端三部分组成。空间端主要有5颗静止轨道卫星和30颗非静止轨道卫星。地面端主要包括主控站和注入站以及监测站等若干个地面站。 简单的来说,卫星导航技术主要是利用一组导航卫星,来对地面、海洋和空间用户进行精准的定位。北斗导航定位系统具有全时空、全天候、高精度、连续实时地提供导航、定位和授时的特点,已成为应用广泛的导航定位技术。 2、一代北斗导航定位系统的工作过程 北斗卫星一代导航系统的工作过程是:首先由中心控制系统向卫星I和卫星II同时发送询问信号,经卫星转发器向服务区内的用户广播。用户响应其中一颗卫星的询问信号,并同时向两颗卫星发送响应信号,经卫星转发回中心控制系统。中心控制系统接收并解调用户发来的信号,然后根据用户的申请服务内容进行相应的数据处理。 3、北斗导航定位系统的四大功能 1)北斗短报文通信功能:北斗系统用户终端具有双向报文通信功能,用户可以一次传送多达120个汉字的信息。目前在远洋航行中有重要的应用价值。 2)精密授时:北斗系统具有精密授时功能,可向用户提供20ns-100ns时间同步精度。
3)定位精度:水平精度100米(1σ),设立标校站之后为20米(类似差分状态)。 4)工作频率:2491.75MHz。 系统容纳的最大用户数:每小时540000户。 4、二代北斗导航定位系统 第二代“北斗”卫星导航定位系统需要发射35颗卫星,相比GPS,多出11颗卫星。“北斗“卫星导航定位系统将提供开放服务和授权服务。开放服务在服务区免费提供定位,测速和授时服务,定位精度为10米,授时精度为50纳秒,测速精度为0.2米/秒。授权服务则主要的是军事用途,将向授权用户提供更安全与更高精度的定位,测速,授时服务。 5、北斗导航定位系统的未来 目前我国的导航市场主要是gps的天下,随着北斗的发展,更多的北斗+gps 产品出现,这对于用户来说是具有重大的好处,可以获得更加精准的定位导航服务。作为北斗导航定位系统的专业的服务者,我们莱特不仅提供北斗导航定位设备,短报文通信设备,主要也在提供更多的导航教学设备,为北斗教学提供更有利的支持。
基于北斗的公安勤务车辆管理系统 一,系统组成 基于北斗的公安勤务定位监控系统由指挥控制中心、北斗用户终端、通信网络传输平台、系统软件、GIS地理信息系统软件等部分组成。 北斗用户终端中的北斗(北斗/GPS兼容)接收机接收到卫星发送的定位信号处理后获得车辆、人员的位置、速度、运动方向及时间等各种数据信息及紧急事件告警信息,通过微处理器数据打包,由通信模块发送,经无线移动通信网络(或再经过INTERNET网)上传到指挥控制终端;在与GPS系统信息进行数据处理后存储,并送到大屏幕同电子地图叠加标定显示,上述信息也可在车载北斗应用终端的显示屏上显示。指挥控制终端发布的信息和调度指令,下传到有关的车载终端并加以显示。 1,基于北斗的车辆诊断与定位终端 车载北斗用户终端为公安勤务各类车辆实时提供高精度、高可靠的北斗卫星导航定位信息(位置、速度、方向和时间)、CAN总线的数据采集与诊断以及与指挥中心的通信,实现其快速准确的状态上报和执行调动任务;部分重要车辆上的用户终端具有北斗短报文通信能力。满足特殊环境或重要事件发生时,与其他具有短报文通信能力的车辆或指挥中心应急通信的需求。 2,通信网络 通过GSM/GPRS网络为公安勤务北斗定位监控系统搭建无线数据传输平台,实现车辆实际位置、速度、运行方向等信息上报指挥中心,并传输指挥中心对车辆进行监控、管理和调度指令。
二,基于北斗/GPS的公安勤务车在北斗中的功能实现如下: 1,智能预案管理,实时警力目标的实时定位监控,指挥部门可实时掌握警力部署情况,根据事发地点就近调动部署警力,实现快速反映、精确指导、精确打击,实现勤务 工作时间上的“零缝隙”和指挥调度空间上的“零距离”,大大提高警务工作效率。 2,实现特殊环境下的警用目标定位跟踪,利用北斗导航系统提供的短报文通信功能,可以将定位目标卫星信息通过卫星通路实时回传指挥中心,解决特殊环境下位置信 息回传没有通信链路的问题,保障指挥控制中心对定位目标的掌控。 3,结合警用地理信息系统,指挥控制中心根据警力目标位置,迅速掌握事发地周边的人、地、物、事、组织情况,同时调动周边视频监控资源,使指挥人员及时掌控事 发地周边整体态势,为警务指挥决策提供科学依据。 4,警用车辆巡逻及出警管理;偏离线路报警、偏离区域报警、一个班次巡逻次数的监控、巡逻时间的监控、岗位考勤监督管理;利用北斗/GPS定位系统将车辆实施定 位数据及执法终端定位数据回传到指挥中心并作数据存储,保证指挥控制中心可动 态掌控警力在岗实际情况,改变以往由各单位上报警力部署,而指挥部门无法实施 有效监督的现状,利用高新技术手段实现了“机器管人,机器帮人” 5,实现重大自然灾害时的应急通信保障,由于目前警用指挥调度系统大部分基于地面通信网进行建设,当发生重大自然灾害地面通信网受损时,可以利用北斗短报文功 能,第一时间进行警情警令的上传下达,为极端恶劣条件下的应急指挥通信提供安 全可靠的手段。 6,里程及油耗统计;统计单位时间内的里程,同时根据里程算出油耗,防止偷油及公车私用。 7,警用车辆身份认证,确认驾驶人身份信息及驾驶权限。 中国航天科工信息技术研究院 2014.5.24
北斗卫星导航系统 ——世界第三套全球卫星导航系统 工程总投资:100亿元 工程期限:1994年——2020年 北京时间2007年2月3日凌晨零时28分,中国在西昌卫星发射中心用“长征三号甲”运载火箭,成功将第四颗北斗导航试验卫星送入太空。 北斗卫星导航定位系统是由中国自行研发的区域性有源三维卫星定位与通信系统(CNSS),
是继美国的全球定位系统(GPS)、俄罗斯的格洛纳斯(GLONASS)定位系统之后世界第三个成熟的卫星导航系统。 该系统分为“北斗一代”和“北斗二代”,分别由4颗(两颗工作卫星、两颗备用卫星)和35颗北斗定位卫星、地面控制中心为主的地面部份、北斗用户终端三部分组成。北斗定位系统可向用户提供全天候、二十四小时的即时定位服务,定位精度可达数十纳秒(ns)的同步精度,其精度与GPS相当。中国在2000年至2007年先后发射了四颗“北斗一号”卫星,这种区域性(中国境内)的卫星导航定位系统,正在为中国陆地交通、航海、森林防火等领域提供着良好服务。 北斗一号导航定位卫星由中国空间技术研究院研究制造,四颗导航定位卫星的发射时间分别为: 日期火箭卫星轨道 2000年10月31日长征三号甲北斗-1A 地球静止轨道140°E 2000年12月21日长征三号甲北斗-1B GEO 80°E 2003年05月25日长征三号甲北斗-1C GEO 110.5°E 第三颗是备用卫星 2007年02月03日长征三号甲北斗-1D GEO 86°E 第四颗是备用卫星 2007年04月14日长征三号甲北斗-2A 中地球轨道(21500KM) 北斗二代首颗卫星
军用新型北斗卫星导航手持机 北斗卫星导航系统的历史 我国早在60年代末就开展了卫星导航系统的研制工作,但由于多种原因而夭折。在自行研制“子午仪”定位设备方面起步较晚,以致后来使用的大量设备中,基本上依赖进口。70年代后期以来,国内开展了探讨适合国情的卫星导航定位系统的体制研究。先后提出过单星、双星、三星和3-5星的区域性系统方案,以及多星的全球系统的设想,并考虑到导航定位与通信等综合运用问题,但是由于种种原因,这些方案和设想都没能够得到实现。 1983年,“两弹一星”功勋奖章获得者陈芳允院士和合作者提出利用两颗同步定点卫星进行定位导航的设想,经过分析和初步实地试验,证明效果良好,这一系统被称为“双星定位系统”。双星定位导航系统为我国“九五”列项,其工程代号取名为“北斗一号”。 双星定位导航系统是一种全天候、高精度、区域性的卫星导航定位系统,可实现快速导航定位、双向简短报文通信和定时授时3大功能,其中后两项功能是全球定位系统(GPS)所不能提供的,且其定位精度在我国地区与GPS定位精度相当。整个系统由两颗地球同步卫星(分别定点于东经80度和东经140度36000公里赤道上空)、中心控制系统、标校系统和用户机4大部分组成,各部分间由出站链路(即地面中心至卫星至用户链路)和入站链路(即用户机至卫星