直流电动机的模型
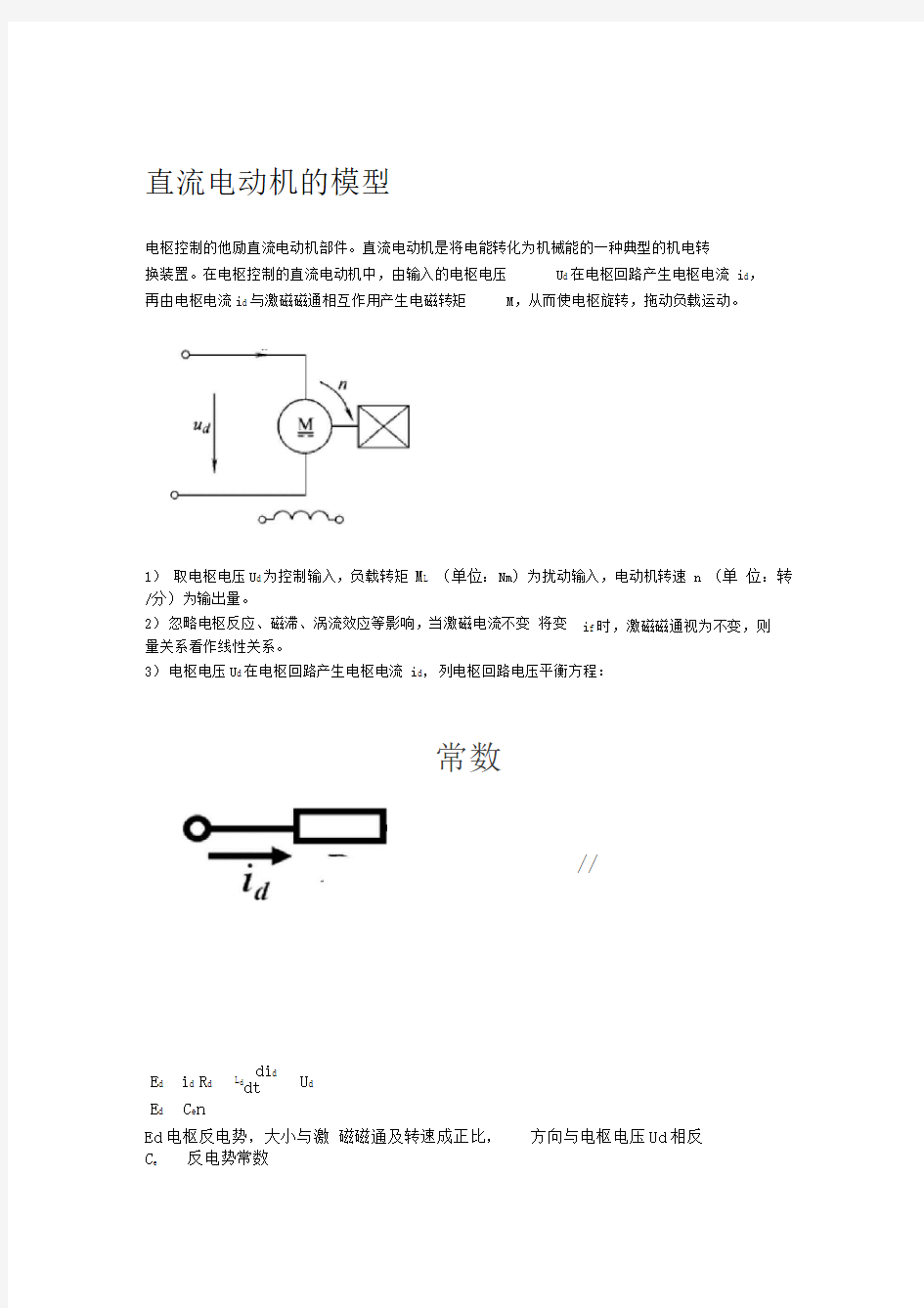
电枢控制的他励直流电动机部件。直流电动机是将电能转化为机械能的一种典型的机电转 换装置。在电枢控制的直流电动机中,由输入的电枢电压
U d 在电枢回路产生电枢电流 i d , 再由电枢电流i d 与激磁磁通相互作用产生电磁转矩 M ,从而使电枢旋转,拖动负载运动。
1) 取电枢电压U d 为控制输入,负载转矩 M L (单位:Nm )为扰动输入,电动机转速 n (单 位:转/分)为输出量。
2) 忽略电枢反应、磁滞、涡流效应等影响,当激磁电流不变 将变量关系看作线性关系。
3) 电枢电压U d 在电枢回路产生电枢电流 i d ,列电枢回路电压平衡方程:
常数
Ed 电枢反电势,大小与激 磁磁通及转速成正比,
方向与电枢电压Ud 相反 C e
反电势常数
i f 时,激磁磁通视为不变,则 //
E d i d R d
di d E d C e n
L d dt U d
4)电枢电流i d与激磁磁通相互作用产生电磁转矩M,在激磁磁通不变时M与电枢电流成正比,M C m i d
5)电磁转矩拖动负载运动,列电机轴上的转矩平衡方程:
J J
dt
其中,f是电动机和负载折合到电动机轴上的粘性摩擦系数, 机轴上的转动惯量。
(工程计算中,往往不用转动惯量
差一个倍数。J m 2 m D)/ 其中P ---惯性半径(单位:米),
m---旋转部分的质量n---转速(转/分)2
M M L , 是电动机角速度,单位rad/s, —n
60
J是电动机和负载折合到电动
J,而用飞轮矩GD2,类似转动惯量J,只是单位不同,相
GD2/4g
(单位: D---惯性直径(单位:米)
kg),G---旋转部分的重量
2
,g---重力加速度,9.81m/s,
(单位:N)
则,转矩平衡方程变为: Jd^
2 2
GD22 dn GD2 dn 4g 60 dt 375 dt
(教材中,采用的是电动机的飞轮矩GD2,且电动机空载,并忽略粘性摩擦,所以f和M L
C 2 H n
均为零,即为方程M
)
6)消去中间变量,整理可得电动机的微分方程
L, GD2 R d d2n 375 C m C e dt2"
GD2尺dn
375C m C e d?
n C e U d
n
C e
7)在工程应用中,由于电枢电路电感Ld较小,通常忽略不计,则上式可简化为一阶方程: T m号n严
dt C e
画出电动机的动态结构图:
E d i d R d L d
di
d U d
dt
l d(S
)
L d s R d(U d(s)E d(s)) M(s) C m l d(s)
GD2 dn 375 dt
375 N(s)尿M⑸
E d C e n E d(s) C e N(s)
若以角速度为输出量,贝y J —
dt
M M L(S)占
bl]
(9)
(此处Kb与Ce相差一个倍数)
若以角位移为输出量,
d
dt
1
(s) - (s)
s
图2-53位置随动系统u1 3k0( r c) u 2k o( r c)
实验一直流并励电动机 一.实验目的 1.掌握用实验方法测取直流并励电动机的工作特性和机械特性。 2.掌握直流并励电动机的调速方法。 二.预习要点 1.什么是直流电动机的工作特性和机械特性? 答:工作特性:当U = U N , R f + r f = C时,η, n ,T分别随P 2 变; 机械特性:当U = U N , R f + r f = C时, n 随 T 变; 2.直流电动机调速原理是什么? 答:由n=(U-IR)/Ceφ可知,转速n和U、I有关,并且可控量只有这两个,我们可以通过调节这两个量来改变转速。即通过人为改变电动机的机械特性而使电动机与负载两条特性的交点随之改变,从而达到调速的目的。 三.实验项目 1.工作特性和机械特性 保持U=UN和If=IfN不变,测取n=f(Ia)及n=f(T2)。 2.调速特性 (1)改变电枢电压调速 保持U=UN、If=IfN=常数,T2=常数,测取n=f(Ua)。 (2)改变励磁电流调速 保持U=UN,T2 =常数,R1 =0,测取n=f(If)。 (3)观察能耗制动过程 四.实验设备及仪器 1.MEL-I系列电机教学实验台的主控制屏。 2.电机导轨及涡流测功机、转矩转速测量(MEL-13)、编码器、转速表。 3.可调直流稳压电源(含直流电压、电流、毫安表) 4.直流电压、毫安、安培表(MEL-06)。
I S :涡流测功机励磁电流调节,位于MEL-13。 (2)测取电动机电枢电流I a 、转速n和转矩T 2 ,共取数据7-8组填入表1-8中 表1-8U=U N=220V I f=I f N=K a=Ω 2.调 速 特 性 (1) 改变 电枢 端电 压的调速 f fN2 (2)改变励磁电流的调速 2= 一7接线 MEL-09) MEL-03中两只900Ω电阻 MEL-05) .直流电动机起动前, 测功机加载旋钮调至零. 实验做完也要将测功机负载钮调到零,否则电机起动时,测功机会受到冲击。 2.负载转矩表和转速表调零.如有零误差,在实验过程中要除去零误差。 3.为安全起动, 将电枢回路电阻调至最大, 励磁回路电阻调至最小。 4.转矩表反应速度缓慢,在实验过程中调节负载要慢。 5.实验过程中按照实验要求, 随时调节电阻, 使有关的物理量保持常量, 保证实验数据的正确性。 七.实验数据及分析
他励、串励、并励、复励直流电动机的机械 特性,及其工作特性与应用领域 一、他励直流电动机的机械特性,及其工作特性与应用领域 图中:n0为理想空载转速 n’0是实际空载转速。 他励电机的机械特性曲 线斜率小,机械硬度高。 他励直流电动机工作特性 1. 转速特性 2. 转矩特性 T T C C '=Φ 3. 效率特性 a a e e R U n I C C = + Φ Φ e T a T a T C I C I '==Φ2Fe mec Cuf a a a c 21a f 2Δ100%1() p p p I R I U P P U I I ??++++η= ?=- ?? +? ?
应用领域 他励电动机常用于转速不受负载影响又便于在大范围内调速的生产机械。如大型车床、龙门刨床。 二、串励直流电动机的机械特性, 串励电动机的机械特性为双曲线, 转速随转矩的增加而下降速率很快,称为软特性 Rj=0为自然机械特性 Rj不等于零为人工机械特性 工作特性
电动势平衡方程式 电动势公式 转矩平衡方程式 转矩公式 (其中,R fc 为串励绕组电阻) 应用领域 串励电机因转速可调范围广,启动扭矩大的特点被广泛的应用于电动工具,厨房用品,地板护理产品领域。 a e a a E C n C I n '==Φe 20 T T T =+2e T a T a T C I C I '==Φa e f C C K '=T T f C C K '=2e 200 602πP T T T T n =+=+?
三、并励直流电动机的机械特性 n0为理想空载转速,与端电压有关, 直线斜率k<0,表明n是T的减函数, 其下降速率与调节电阻Rj大小有关。 Rj=0为自然机械特性 Rj不等于零为人工机械特性 Rj=0时,特征曲线接近于水平线,表示硬特性。即硬度高。工作特性
直流电动机直接起动仿真 直流电动机直接起动时,起动电流很大,可以达到额定电流的10-20倍,由此产生很大的冲击转矩。适用Simulink对直流电动机的直接起动过程建立仿真模型,通过仿真获得直流电动机的直接起动电流和电磁转矩的变化过程。 设备及器件: 计算机,一台(MA TLAB)。 内容: 建立仿真模型;通过图形验证。 要求: 能够正确使用simulink建立仿真模型,并观察分析图形。 直流电动机直接起动仿真模型图 图中的模块有直流电源(DC Voltage Source)、理想开关、直流电动机、开关、增益、电阻(RLC branch)、示波器(scope)、信号分离模块(Demux)。仿真模型中通过理想开关模块控制直流电源的接通和断开,使用开关模块控制电机的转矩,使电机在起动过程中的转矩为空载起动,当转速达到设定值后,使电机工作再给定的负载转矩。 直流电机模块参数:
直流电源模块参数: 定时模块:0s时输出为0, 0.5s时输出为1 理想开关:
开关模块:增益模块 常量模块:
电阻设置: 仿真时间为5s
通过这次课程设计使我懂得了理论与实际相结合是很重要的,只有理论知识是远远不够的,只有把所学的理论知识与实践相结合起来,从理论中得出结论,才能真正为社会服务,从而提高自己的实际动手能力和独立思考的能力。在设计的过程中遇到问题,可以说得是困难重重,这毕竟第一次做的,难免会遇到过各种各样的问题,同时在设计的过程中发现了自己的不足之处,对以前所学过的知识理解得不够深刻,掌握得不够牢固。 这次课程设计终于顺利完成了,在设计中遇到了很多专业知识问题,最后在老师的辛勤指导下,终于游逆而解。同时,在老师的身上我们学也到很多实用的知识,在次我们表示感谢!
实验一直流他励电动机在各种运转状态下的机械特性 一、实验目的 测定他励直流电动机的自然机械特性及各种电气参数变化时的人为机械特性。 通过试验掌握直流电动机在各种运行状态时的特点和能量转换的规律。 二、预习要点 1、改变他励直流电动机机械特性有哪些方法? 2、他励直流电动机在什么情况下,从电动机运行状态进入回馈制动状态?他励直流电动机回馈制动时,能量传递关系,电动势平衡方程式及机械特性又是什么情况? 3、他励直流电动机反接制动时,能量传递关系,电动势平衡方程式及机械特性。 三、实验项目 1、电动及回馈制动状态下的机械特性 2、电动及反接制动状态下的机械特性 3、能耗制动状态下的机械特性 四、实验设备及挂件排列顺序 1、实验设备 序 型号名称数量 号 1 DD01 电源控制屏1台 2 DD0 3 不锈钢电机导轨、测速系统及数显转速表1件 3 DJ15 直流并励电动机1台 4 DJ23 校正直流测功机1台 5 D51 波形测试及开关板1件 2、屏上挂件排列顺序D51 五、实验方法及步骤
按图1-1接线,图中M用编号为DJ15的直流并励电动机(接成他励方式),MG用编号为DJ23的校正直流测功机,直流电压表V1的量程为500V,直流电流表A2、A4的量程为200mA,A1、A3的量程为5A。R2 、R4选用R1、R3上的900Ω电阻分压接法,R1选用R2、R4上4个90Ω串联,R3选用R5上的900Ω并联加上R6上的90Ω串联和实验台面上两个1300Ω并联。开关S1、S2选用D51上的双刀双掷开关。 直流电动机运行于电动及回馈制动状态下的自然机械特性 (一)试验概述: (1)测定被试直流电动机M运行于电动状态的机械特性时,在其轴上可加负载的形式是多种多样的,然而要获得反接、回馈及能耗制动等状态时的机械特性,其最可行的方法是采用一台直流电机来做负载,利用负载机MG工作在不同的运行状态,来测出受试电动机M于不同运转状态的机械特性。 (2)本实验的自然机械特性从额定运行点开始,向空载、回馈发电方向进行,测取被试机M的n、I a然后计算它的转矩T,求得n=f(T )机械特性(由于直流电机T=C TφI,在φ保持不变时则T=I)。 (3)当被试机M运行于电动状态时(即第一象限运行),其负载机MG处于制动运行状态(可以是发电制动状态也可以是电枢反接、转速反向的制动状态)。本实验建议采用电枢反接、转速反向的制动状态运行,使MG服从于M的转向,因此负载机MG合闸时电枢串联的电阻R3应足够大,以免负载转矩太大,引起电枢电流太大,我们可以通过调节MG的电枢串联电阻R3的大小,而调节被试机M的负载的大小。 (4)当被试机M运行于回馈发电状态时(即第二象限运行),这时它需要负载机MG为原动机来拖动。因此负载机MG应处于正向高转速下的电动运行,这可以通过减小R3的阻值;或减小I4值而得到实现。 (二)原理和步骤 A)原理: (1)实验线路如图1-1,直流电动机的自然机械特性试验的条件是U=U N;I f=I fN;R1 = 0 求n=f(T),因此实验 过程中应注意保持试验条件不变。 (2)当被试机M正向电动时(即运行于第一象限): M:电枢正接,起动后R1 = 0 。 MG:电枢反接,(在R3于阻值最大时接通电源) 使负载机MG 处于反接制动运行,改变R3的阻值可以得到负载机MG的各个 不同斜率的负载特性曲线与被试机M的被测机械特性曲线相交 平衡,从而调节被试机M的负载,其运行图如图1-2所示的虚 线a、b、c、d、e点。 (3)当被试机M回馈制动运行时(即运行于第Ⅱ象限): M:电枢正接,(被负载机MG正拖到转速大于理想空载转速)。 MG:电枢正接,通过改变磁场电阻R4使负载机的理想空载转速大于被试机的理想空载转速。然后改变R3的阻值可以得到负载机MG的各个不同斜率的负载特性曲线与被试机M的被测机械特性曲线相交平衡,从而调
第一章课程设计内容及要求 1. 直流电动机的机械特性仿真; 2. 直流电动机的直接起动仿真; 3. 直流电动机电枢串联电阻启动仿真; 4. 直流电动机能耗制动仿真; 5.直流电动机反接制动仿真; 6. 直流电动机改变电枢电压调速仿真; 7. 直流电动机改变励磁电流调速仿真。 要求:编写M文件,在Simulink环境画仿真模型原理图,用二维画图命令画仿真结果图或用示波器观察仿真结果,并加以分析
第二章直流电动机的电力拖动仿真绘制 1)直流电动机的机械特性仿真 clear; U_N=220;P_N=22;I_N=115; n_N=1500;R_a=;R_f=628; Ia_N=I_N-U_N/R_f; C_EPhi_N=(U_N-R_a*Ia_N)/n_N; C_TPhi_N=*C_EPhi_N; Ia=0;Ia_N; n=U_N/C_EPhi_N-R_a/(C_EPhi_N)*Ia; Te=C_TPhi_N*Ia; P1=U_N*Ia+U_N*U_N/R_f; T2_N=9550*P_N/n_N; figure(1); plot(Te,n,'.-'); xlabel('电磁转矩Te/'); ylabel('转矩n/rpm'); ylim([0,1800]); figure(2); plot(Te,n,'rs'); xlabel('电磁转矩Te/'); ylabel('转矩n/rpm');
hold on; R_c=0; for coef=1:;; U=U_N*coef; n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'k-'); str=strcat('U=',num2str(U),'V'); s_y=1650*coef; text(50,s_y,str); end figure(3); n=U_N/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'rs'); xlabel('电磁转矩Te/'); ylabel('转矩n/rpm'); hold on; U=U_N;R_c=; for R_c=0::; n=U/C_EPhi_N-(R_a+R_c)/(C_EPhi_N*C_TPhi_N)*Te; plot(Te,n,'k-'); str=strcat('R=',num2str(R_c+R_a),'\Omega'); s_y=400*(4-R_c*; text(120,s_y,str);
直流电动机数学模型的建立 4.1 数学模型的建立 建立电动机动态数学模型的方法的要点是:首先列写出电动机主电路电压平衡方程式,轴上力矩平衡方程式和励磁电路电压平衡方程式等基本关系式,加以整理,然后进行拉普拉斯变换,根据此变换,即可求出电动机的动态结构图和传递函数的表达式[1,10]。 图4—1 上图为一他励直流电动机的等效电路,其中: a U E----分别为电动机电枢端电压和反电势; d I f I ---电动机电枢电流和励磁电流; a R a L ---电枢电路电阻和电感; f R f L ---励磁电路电阻和电感; f U -------电动机的励磁电压; ω-------电动机的角速度; J--------电动机轴上的转动惯量; e T l T ----电动机转矩和负载阻转矩。 4.1.1 写出平衡方程式、拉普拉斯变换 由上图可写出下列基本关系式: a U -E= a R (1+a T S ?) d I e T -l T =J ?S ? ω
f U = f R ()f f I T S ??+1 E= ω ωφ???=??f e I M p K Te= d f d m I I M p I K ???=??φ 其中:a a a R L T = 为电枢电路时间常数;f f f R L T = 为励磁电路时间常数;p 为电动机磁极对数;M 为励磁绕组和电枢绕组的互感; 4.1.2 动态结构图 将S=d/dt 看作算子,则上述诸式也就是它们的拉氏变换。所以由上式可画出直流电动机的结构。如图4—2所示。 图4—2 如果将讨论的问题限制在稳态工作点附近的小偏差情况,经过化简,可得此时系统的增量方程为:d a a a I T S R E U ??+?=-)1( ω ??=-S J T T l e f f f f I T S R U ??+?=)1( 0Ω???+???=f f I M p I M p E ω 0 0d f d f e I I M p I I M p T ???+???= 为简化起见,式中表示增量的下标1已删去。由诸式可画出直流电动机在独立电枢电压和磁场控制下的动态结构图如下所示: