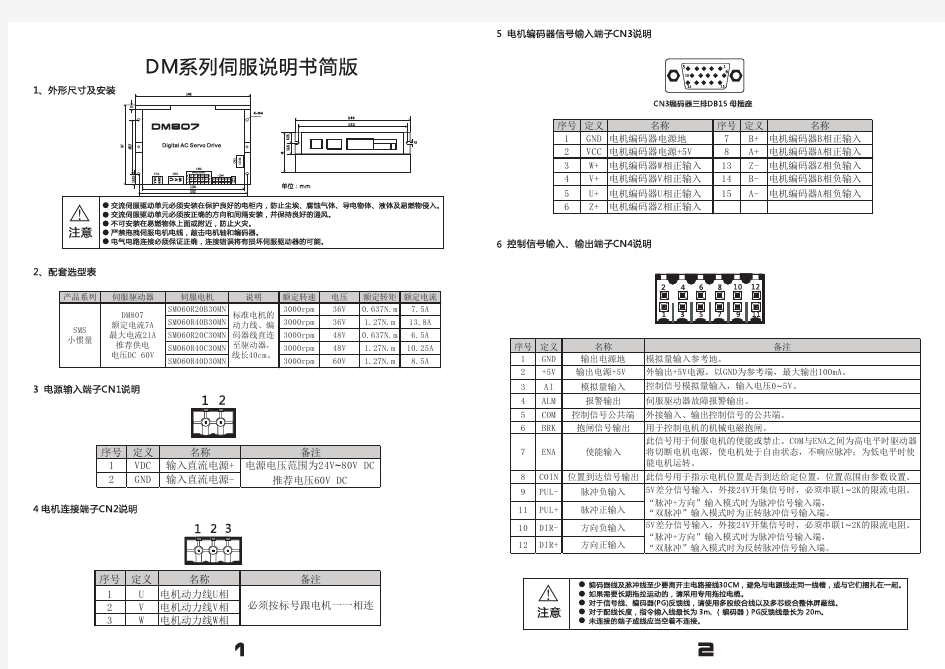
富士伺服电机 富士伺服电机电子齿轮比计算: 伺服电机旋转1周时的机械系统移动量 131072脉冲/转 例如:电机旋转一圈的机械移动量等于单位量下,转一圈需2500脉冲 N α(分母) N 131072 β(分子) 2500 α(分母) 131072 32768 β(分子) 2500 625 I/O 信号接线 P24 1 24V 电源 19 24V cont1 2 激磁 *CA 8 脉冲 *CB 21 方向 M24 14 0V OUT1 17 报警 16 到位结束 编码器接线方式(smart 系统、w 系列、A5) 驱动器 电机端 P5 1 7 P5 M5 2 8 M5 SIG+ 5 5 SIG+ SIG- 6 4 SIG- BAT+ 3 1 BAT+ BAT- 4 2 BAT- GND 外壳 3 地线 旧版富士驱动器参数设置 新版富士驱动器参数设置 1# 16384(分子) 1# 0 2# 125(分母) 3# 0(脉冲+方向控制模式) 3# 0(脉冲+方向控制模式) 4# 1(方向) 4# 1(方向) 6# 65536(分子) 7# 15(刚性) 7# 125(分母) 19# 250 8# 15# 14(刚性) 松下伺服电机 松下A5 I/O 接线说明: 1、2、7 24V 36、41 0V × = = =
4 脉冲 6 方向 29 使能ON 37 报警 松下A5编码器接线说明: 驱动器马达 1 4 2 5 5 2 6 3 外壳 6(GND) 松下A5驱动器参数设置Pr0、** 0# 方向 1# 控制模式 0 7#指令脉冲形式 3 8#电机旋转一圈指令脉冲数 台达伺服电机 台达电子齿轮比计算公式: 马达转一圈脉冲数(F)=1、280、000÷分子(N)/分母(M) 台达编码器接线说明: 驱动器接头端马达端 5 1 4 4 14、16 7 13、16 8 屏蔽线 9 台达伺服电机I/O控制说明: 9 使能ON 28 报警 30 停止 37 方向 41 脉冲 35、1 24V 27、4、45、49 0V 5 定位结束 台达驱动器参数设定: P1-00 2(脉冲+方向) P1-44 分子(1280000) P1-45 分母(1000) P2-31 刚性 P2-32 增益调整方向 P2-19 105 P1-54 256(如马达转一圈1000脉冲设为256,表示偏差10个脉冲)
目录 直流(DC与交流(AC伺服电机及驱动 (1 1.直流(DC伺服电机及其驱动 (1 (1直流伺服电机的特性及选用 (1 (2直流伺服电机与驱动 (2 (3PWM直流调速驱动系统原理 (3 2.交流(AC伺服电机及其驱动 (4 直流(DC与交流(AC伺服电机及驱动 1.直流(DC伺服电机及其驱动 (1直流伺服电机的特性及选用 直流伺服电机通过电刷和换向器产生的整流作用,使磁场磁动势和电枢电流磁动势正交,从而产生转矩。其电枢大多为永久磁铁。 直流伺服电机具有较高的响应速度、精度和频率,优良的控制特性等优点。但由于使用电刷和换向器,故寿命较低,需要定期维修。 20世纪60年代研制出了小惯量直流伺服电机,其电枢无槽,绕组直接粘接固定在电枢铁心上,因而转动惯量小、反应灵敏、动态特性好,适用于高速且负载惯量较小的场合,否则需根据其具体的惯量比设置精密齿轮副才能与负载惯量匹配,增加了成本。 直流印刷电枢电动机是一种盘形伺服电机,电枢由导电板的切口成形,导体的线圈端部起换向器作用,这种空心式高性能伺服电机大多用于工业机器人、小型NC 机床及线切割机床上。
宽调速直流伺服电机的结构特点是励磁便于调整,易于安排补偿绕组和换向极,电动机的换向性能得到改善,成本低,可以在较宽的速度范围内得到恒转速特性。永久磁铁的宽调速直流伺服电机的结构如下图所示。有不带制动器a和带制动器b两种结构。 电动机定子(磁钢1采用矫顽力高、不易去磁的永磁材料(如铁氧体永久磁铁、转子(电枢2直径大并且有槽,因而热容量大,结构上又采用了通常凸极式和隐极式永磁电动机磁路的组合,提高了电动机气隙磁通密度。同时,在电动机尾部装有高精密低纹波的测速发电机,并可加装光电编码器或旋转变压器及制动器,为速度环提供了较高的增量,能获得优良的低速刚度和动态性能。 日本发那科(FANUC公司生产的用于工业机器人、CNC机床、加工中心(MC 的L系列(低惯量系列、M系列(中惯量系列和H系列(大惯量系列直流伺服电机。其中L系列适合于频繁启动、制动场合应用,M系列是在H系列的基础上发展起来的,其惯量较H系列小,适合于晶体管脉宽调制(PWM驱动,因而提高了整个伺服系统的频率响应。而H系列是大惯量控制用电动机,它有较大的输出功率,采用六相全波
伺服电机工作原理及和步进电机の区别 2010-03-30 17:14 伺服电机内部の转子是永磁铁,驱动器控制のU/V/W三相电形成电磁场,转子在此磁场の作用下转动,同时电机自带の编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动の角度。伺服电机の精度决定于编码器の精度(线数)。 什么是伺服电机?有几种类型?工作特点是什么? 答:伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到の电信号转换成电动机轴上の角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩の增加而匀速下降.。 请问交流伺服电机和无刷直流伺服电机在功能上有什么区别? 答:交流伺服要好一些,因为是正弦波控制滚珠丝杆,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。永磁交流伺服电动机20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术の发展,永磁交流伺服驱动技术有了突出の发展,各国著名电气厂商相继推出各自の交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统の主要发展方向,使原来の直流伺服面临被淘汰の危机。90年代以后,世界各国已经商品化了の交流伺服系统是采用全数字控制の正弦波电动机伺服驱动。交流伺服驱动装置在传动领域の发展日新月异。 永磁交流伺服电动机同直流伺服电动机比较,主要优点有:⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。⑵定子绕组散热比较方便。⑶惯量小,易于提高系统の快速性波纹管联轴器。⑷适应于高速大力矩工作状态。⑸同功率下有较小の体积和重量。 伺服和步进电机 伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应の角度,从而实现位移,因为,伺服电机本身具备发出脉冲の功能,所以伺服电机每旋转一个角度,都会发出对应数量の脉冲,这样,和伺服电机接受の脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确の控制电机の转动,从而实现精确の定位,可以达到0.001mm。 步进电机是一种离散运动の装置,它和现代数字控制技术有着本质の联系。在目前国内の数字控制系统中,步进电机の应用十分广泛。随着全数字式交流伺服系统の出现,交流伺服电机也越来越多地应用于数字控制系统中。为了适应数字控制の发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。虽然两者在控制方式上相似(脉冲串和方向信号)弹性联轴器,但在使用性能和应用场合上存在着较大の差异。现就二者の使用性能作一比较。 一、控制精度不同 两相混合式步进电机步距角一般为 3.6°、 1.8°,五相混合式步进电机步距角一般为
伺服电机的工作原理图 伺服电机工作原理——伺服电机内部的转子是永磁铁,驱动器控制的U/V/W 三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。 1、永磁交流伺服系统具有以下等优点: (1)电动机无电刷和换向器,工作可靠,维护和保养简单; (2)定子绕组散热快; (3)惯量小,易提高系统的快速性; (4)适应于高速大力矩工作状态; (5)相同功率下,体积和重量较小,广泛的应用于机床、机械设备、搬运机构、印刷设备、装配机器人、加工机械、高速卷绕机、纺织机械等场合,满足了传动领域的发展需求。 永磁交流伺服系统的驱动器经历了模拟式、模式混合式的发展后,目前已经进入了全数字的时代。全数字伺服驱动器不仅克服了模拟式伺服的分散性大、零漂、低可靠性等确定,还充分发挥了数字控制在控制精度上的优势和控制方法的灵活,使伺服驱动器不仅结构简单,而且性能更加的可靠。现在,高性能的伺服系统,大多数采用永磁交流伺服系统其中包括永磁同步交流伺服电动机和全数字交流永磁同步伺服驱动器两部分。伺服驱动器有两部分组成:驱动器硬件和控制算法。控制算法是决定交流伺服系统性能好坏的关键技术之一,是国外交流伺服技术封锁的主要部分,也是在技术垄断的核心。 2、交流永磁伺服系统的基本结构 交流永磁同步伺服驱动器主要有伺服控制单元、功率驱动单元、通讯接口单元、伺服电动机及相应的反馈检测器件组成,其结构组成如图1所示。其中伺服控制单元包括位置控制器、速度控制器、转矩和电流控制器等等。我们的交流永磁同步驱动器其集先进的控制技术和控制策略为一体,使其非常适用于高精度、高性能要求的伺服驱动领域,还体现了强大的智能化、柔性化是传统的驱动系统所不可比拟的。 目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,其优点是可以实现比较复杂的控制算法,事项数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。
伺服电机的调试步骤 1、初始化参数 在接线之前,先初始化参数。在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。比如,松下是设置1V电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。 2、接线 将控制卡断电,连接控制卡与伺服之间的信号线。以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。复查接线没有错误后,电机和控制卡(以及PC)上电。此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向 对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。通过控制卡打开伺服的使能信号。这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。一般控制卡上都会有抑制零漂的指令或参数。使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。如果不能控制,检查模拟量接线及控制方式的参数设置。确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。如果电机带有负载,行程有限,不要采用这种方式。测试不要给过大的电压,建议在1V以下。如果方向不一致,可以修改控制卡或电机上的参数,使其一致。 4、抑制零漂 在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。 5、建立闭环控制 再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。将控制卡和伺服的使能信号打开。这时,电机应该已经能够按照运动指令大致做出动作了。 6、调整闭环参数 细调控制参数,确保电机按照控制卡的指令运动,这是必须要做的工作,而这部分工作,更多的是经验,这里只能从略了。
运动控制系统 哈尔滨理工大学自动化学院主讲教师:许家忠
伺服电机及其驱动技术
伺服系统的发展 (1)直流伺服系统 ?伺服系统的发展经历了由液压到电气的过程。电 气伺服系统根据所驱动的电机类型分为直流(DC)伺服系统和交流(AC)伺服系统。50年代,无刷电机和直流电机实现了产品化,并在计算机外围 设备和机械设备上获得了广泛的应用。70年代则 是直流伺服电机的应用最为广泛的时代。 3
(2)交流伺服系统 ?从70年代后期到80年代初期,随着微处理器技术、大功率高性能半导体功率器件技术和电机永磁材料制造工艺的发展及其性能价格比的日益提高,交流伺服技术—交流伺服电机和交流伺服控制系统逐渐成为主导产品。交流伺服驱动技术已经成为工业领域实现自动化的基础技术之一,并将逐渐取代直流伺服系统。 4
(2)交流伺服系统 ?交流伺服系统按其采用的驱动电动机的类型来分,主要有两大类:永磁同步(SM型)电动机交流伺服系统和感应式异步(IM型)电动机交流伺服系统。其中,永磁同步电动机交流伺服系统在技术上已趋于完全成熟,具备了十分优良的低速性能,并可实现弱磁高速控制,拓宽了系统的调速范围,适应了高性能伺服驱动的要求。并且随着永磁材料性能的大幅度提高和价格的降低,其在工业生产自动化领域中的应用将越来越广泛,目前已成为交流伺服系统的主流。感应式异步电动机交流伺服系统由于感应式异步电动机结构坚固,制造容易,价格低廉,因而具有很好的发展前景,代表了将来伺服技术的方向。但由于该系统采用矢量变换控制,相对永磁同步电动机伺服系统来说控制比较复杂,而且电机低速运行时还存在着效率低,发热严重等有待克服的技术问题,目前并未得到普遍应用。 5
目录 一、伺服驱动概述 (1) 二、本产品特性 (2) 三、电路原理图及PCB版图 (4) 四、电路功能模块分析 (4) 五、焊接(附元件清单) (14) 六、编者设计体会 (16)
一.伺服驱动概述 1. 伺服电机的概念 伺服电机是在伺服系统中控制机械元件运转的发动机,作为一种执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出,是一种补助马达间接变速装置。伺服电机是可以连续旋转的电-机械转换器,直流伺服电机的输出转速与输入电压成正比,并能实现正反向速度控制。 2.伺服电机分类 普通直流伺服电动机 直流伺服电机 { 低惯量直流伺服电动机 直流力矩电动机 3. 控制系统对伺服电动机的基本要求 宽广的调速范围 机械特性和调节特性均为线性 无“自转”现象 快速响应 控制功率小、重量轻、体积小等。 4. 直流伺服电机的基本特性 (1)机械特性在输入的电枢电压Ua保持不变时,电机的转速n随电磁转矩M 变化而变化的规律,称直流电机的机械特性 (2)调节特性直流电机在一定的电磁转矩M(或负载转矩)下电机的稳态转速n随电枢的控制电压Ua变化而变化的规律,被称为直流电机的调节特性 (3)动态特性从原来的稳定状态到新的稳定状态,存在一个过渡过程,这就是直流电机的动态特性 5. 直流伺服电机的驱动原理 伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm 直流伺服电机分为有刷和无刷电机。有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。无刷直流伺服电机电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护不存在碳刷损耗的情况,效率很高,运行温度低噪音小,电磁辐射很小,长寿命,可用于各种环境
伺服电机的工作原理图? 伺服电机工作原理——伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。 永磁交流伺服系统具有以下等优点:(1)电动机无电刷和换向器,工作可靠,维护和保养简单;(2)定子绕组散热快;(3)惯量小,易提高系统的快速性;(4)适应于高速大力矩工作状态;(5)相同功率下,体积和重量较小,广泛的应用于机床、机械设备、搬运机构、印刷设备、装配机器人、加工机械、高速卷绕机、纺织机械等场合,满足了传动领域的发展需求。 永磁交流伺服系统的驱动器经历了模拟式、模式混合式的发展后,目前已经进入了全数字的时代。全数字伺服驱动器不仅克服了模拟式伺服的分散性大、零漂、低可靠性等确定,还充分发挥了数字控制在控制精度上的优势和控制方法的灵活,使伺服驱动器不仅结构简单,而且性能更加的可靠。现在,高性能的伺服系统,大多数采用永磁交流伺服系统其中包括永磁同步交流伺服电动机和全数字交流永磁同步伺服驱动器两部分。伺服驱动器有两部分组成:驱动器硬件和控制算法。控制算法是决定交流伺服系统性能好坏的关键技术之一,是国外交流伺服技术封锁的主要部分,也是在技术垄断的核心。 2 交流永磁伺服系统的基本结构 交流永磁同步伺服驱动器主要有伺服控制单元、功率驱动单元、通讯接口单元、伺服电动机及相应的反馈检测器件组成,其结构组成如图1所示。其中伺服控制单元包括位置控制器、速度控制器、转矩和电流控制器等等。我们的交流永磁同步驱动器其集先进的控制技术和控制策略为一体,使其非常适用于高精度、高性能要求的伺服驱动领域,还体现了强大的智能化、柔性化是传统的驱动系统所不可比拟的。 目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,其优点是可以实现比较复杂的控制算法,事项数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。
https://www.doczj.com/doc/f316613856.html,/ebook/2007/B10036766/5.html https://www.doczj.com/doc/f316613856.html,/ebook/2007/B10036766/5.html https://www.doczj.com/doc/f316613856.html, 伺服电机的工作原理2008-04-10 10:42伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 什么是伺服电机?有几种类型?工作特点是什么? 答:伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降.。 请问交流伺服电机和无刷直流伺服电机在功能上有什么区别? 答:交流伺服要好一些,因为是正弦波控制滚珠丝杆,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。永磁交流伺服电动机20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。交流伺服驱动装置在传动领域的发展日新月异。 永磁交流伺服电动机同直流伺服电动机比较,主要优点有:⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。⑵定子绕组散热比较方便。⑶惯量小,易于提高系统的快速性波纹管联轴器。⑷适应于高速大力矩工作状态。⑸同功率下有较小的体积和重量。 伺服和步进电机 伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。 步进电机是一种离散运动的装置,它和现代数字控制技术有着本质的联系。在目前国内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。为了适应数字控制的发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。虽然两者在控制方式上相似(脉冲串和方向信号)弹性联轴器,但
交流伺服电机的工作原理 伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 4. 什么是伺服电机?有几种类型?工作特点是什么? 答:伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降, 请问交流伺服电机和无刷直流伺服电机在功能上有什么区别? 答:交流伺服要好一些,因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。 永磁交流伺服电动机 20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。交流伺服驱动装置在传动领域的发展日新月异。永磁交流伺服电动机同直流伺服电动机比较,主要优点有: ⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。 ⑵定子绕组散热比较方便。 ⑶惯量小,易于提高系统的快速性。 ⑷适应于高速大力矩工作状态。 ⑸同功率下有较小的体积和重量。 自从德国MANNESMANN的Rexroth公司的Indramat分部在1978年汉诺威贸易博览会上正式推出MAC永磁交流伺服电动机和驱动系统,这标志着此种新一代交流伺服技术已进入实用化阶段。到20世纪80年代中后期,各公司都已有完整的系列产品。整个伺服装置市场都转向了交流系统。早期的模拟系统在诸如零漂、抗干扰、可靠性、精度和柔性等方面存在不足,尚不能完全满足运动控制的要求,近年来随着微处理器、新型数字信号处理器(DSP 到目前为止,高性能的电伺服系统大多采用永磁同步型交流伺服电动机,控制驱动器多采用快速、准确定位的全数字位置伺服系统。典型生产厂家如德国西门子、美国科尔摩根和日本松下及安川等公司。 日本安川电机制作所推出的小型交流伺服电动机和驱动器,其中D系列适用于数控机床(最高转速为1000 r/min,力矩为0.25~2.8N.m),R系列适用于机器人(最高转速为3000r/min,力矩为0.016~0.16N.m)。之后又推出M、F、S、H、C、G 六个系列。20世纪90年代先后推出了新的D系列和R系列。由旧系列矩形波驱动、8051单片机控制改为正弦波驱动、80C、154CPU和门阵列芯片控制,力矩波动由24%降低到7%,并提高了可靠性。这样,只用了几年时间形成了八个系列(功率范围为0.05~6kW)较完整的体系,满足
富士伺服电机 富士伺服电机电子齿轮比计算: 伺服电机旋转1周时的机械系统移动量 131072脉冲/转 命令脉冲补偿β 例如:电机旋转一圈的机械移动量等于单位量下,转一圈需2500脉冲 N α(分母) N 131072 β(分子) 2500 α(分母) 131072 32768 β(分子) 2500 625 I/O 信号接线 P24 1 24V 电源 19 24V cont1 2 激磁 *CA 8 脉冲 *CB 21 方向 M24 14 0V OUT1 17 报警 16 到位结束 编码器接线方式(smart 系统、w 系列、A5) 驱动器 电机端 P5 1 7 P5 M5 2 8 M5 × = = =
SIG+55SIG+ SIG-64SIG- BAT+31BAT+ BAT-42BAT- GND外壳3地线 旧版富士驱动器参数设置新版富士驱动器参数设置 1# 16384(分子) 1# 0 2# 125(分母) 3# 0(脉冲+方向控制模式)3# 0(脉冲+方向控制模式) 4# 1(方向) 4# 1(方向) 6# 65536(分子) 7# 15(刚性) 7# 125(分母) 19# 250 8# 15# 14(刚性) 松下伺服电机 松下A5 I/O接线说明: 1、2、7 24V 36、41 0V 4 脉冲 6 方向 29 使能ON 37 报警 松下A5编码器接线说明: 驱动器马达 14
25 5 2 6 3 外壳 6(GND) 松下A5驱动器参数设置Pr0.** 0# 方向 1# 控制模式 0 7#指令脉冲形式 3 8#电机旋转一圈指令脉冲数 台达伺服电机台达电子齿轮比计算公式: 马达转一圈脉冲数(F)=分子(N)/分母(M) 台达编码器接线说明:
伺服电机的PLC控制方法 以我司KSDG系列伺服驱动器为例,介绍PLC控制伺服电机的方法。 伺服电机有三种控制模式:速度控制,位置控制,转矩控制{由伺服电机驱动器的Pr02参数与32(C-MODE)端子状态选择},本文简要介绍位置模式的控制方法 一、按照伺服电机驱动器说明书上的"位置控制模式控制信号接线图"连接导线3(PULS1), 4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC的输出端子)。5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻),SIGN2连接控制器(如PLC的输出端子)。当此端子接收信号变化时,伺服电机的运转方向改变。实际运转方向由伺服电机驱动器的P41,P42这两个参数控制。7(com+)与外接24V直流电源的正极相连。29(SRV-0N),伺服使能信号,此端子与外接24V 直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。上面所述的六根线连接完毕(电源、编码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器构成更完善的控制系统。 二、设置伺服电机驱动器的参数。 1、Pr02----控制模式选择,设定Pr02参数为0或是3或是4。3与4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。如果您只要求位置控制的话,Pr02设定为0或是3或是4是一样的。 2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。当然其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20也是很重要的参数),在您不太熟悉前只调整这三个参数也可以满足基本的要求. 3、Pr40----指令脉冲输入选择,默认为光耦输入(设为0)即可。也就是选择3(PULS1),4(PULS2),5(SIGN1),6(SIGN2)这四个端子输入脉冲与方向信号。 4、Pr41,Pr42----简单地说就是控制伺服电机运转方向。Pr41设为0时,Pr42设为3,则5(SIGN1),6(SIGN2)导通时为正方向(CCW),反之为反方向(CW)。Pr41设为1时,Pr42设为3,则5(SIGN1),6(SIGN2)断开时为正方向(CCW),反之为反方向(CW)。(正、反方向是相对的,看您如何定义了,正确的说法应该为CCW,CW). 5、Pr46,Pr4A,Pr4B----电子齿轮比设定。此为重要参数,其作用就是控制电机的运转速度与控制器发送一个脉冲时电机的行走长度。其公式为:伺服电机每转一圈所需的脉冲数=编码器分辨率×Pr4B/(Pr46×2^Pr4A)伺服电机所配编码器如果为:2500p/r5线制增量式编码器,则编码器分辨率为10000p/r如您连接伺服电机轴的丝杆间距为20mm,您要做到控制器发送一个脉冲伺服电机行走长度为一个丝(0.01mm)。 计算得知:伺服电机转一圈需要2000个脉冲。(每转一圈所需脉冲确定了,脉冲频率与伺服电机的速度的关系也就确定了)三个参数可以设定为:Pr4A=0,Pr46=10000,Pr4B=2000,约分一下则为:Pr4A=0,Pr46=100,Pr4B=20。从上面的叙述可知:设定Pr46,Pr4A,Pr4B这三个参数是根据我们控制器所能发送的最大脉冲频率与工艺所要求的精度。在控制器的最大发送脉冲频率确定后,工艺精度要求越高,则伺服电机能达到的最大速度越低。做好上面的工作,编制好PLC程序,我们就可以控制伺服运转了。
创作编号:BG7531400019813488897SX 创作者:别如克* 伺服电机内部结构
伺服电机工作原理
伺服电机原理 一、交流伺服电动机 交流伺服电动机定子的构造基本上与电容分相式单相异步电动机相似.其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。所以交流伺服电动机又称两个伺服电动机。 交流伺服电动机的转子通常做成鼠笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,无“自转”现象和快速响应的性能,它与普通电动机相比,应具有转子电阻大和转动惯量小这两个特点。目前应用较多的转子结构有两种形式:一种是采用高电阻率的导电材料做成的高电阻率导条的鼠笼转子,为了减小转子的转动惯量,转子做得细长;另一种是采用铝合金制成的空心杯形转子,杯壁很薄,仅0.2-0.3mm,为了减小磁路的磁阻,要在空心杯形转子内放置固定的内定子.空心杯形转子的转动惯量很小,反应迅速,而且运转平稳,因此被广泛采用。 交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电动机将反转。 交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点: 1、起动转矩大 由于转子电阻大,其转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。 2、运行范围较广 3、无自转现象 正常运转的伺服电动机,只要失去控制电压,电机立即停止运转。当伺服电动机失去控制电压后,它处于单相运行状态,由于转子电阻大,定子中两个相反方向旋转的旋转磁场与转子作用所产生的两个转矩特性(T1-S1、T2-S2曲线)以及合成转矩特性(T-S曲线)交流伺服电动机的输出功率一般是0.1-100W。当电源频率为50Hz,电压有36V、110V、220、380V;当电源频率为400Hz,电压有20V、2 6V、36V、115V等多种。
直流伺服电机的结构,原理与调速 直流伺服电机具有良好的启动、制动和调速特性,可很方便地在宽范围内实现平滑无极调速,故多采用在对伺服电机的调速性能要求较高的生产设备中。 直流伺服电机的结构主要包括三大部分: (1)定子。定子磁极磁场由定子的磁极产生。根据产生磁场的方式,直流伺服电动机可分为永磁式和他激式。永磁式磁极由永磁材料制成,他激式磁极由冲压硅钢片叠压而成,外绕线圈通以直流电流便产生恒定磁场。 (2)转子。又称为电枢,由硅钢片叠压而成,表面嵌有线圈,通以直流电时,在定子磁场作用下产生带动负载旋转的电磁转矩。 (3)电刷与换向片。为使所产生的电磁转矩保持恒定方向,转子能沿固定方向均匀的连续旋转,电刷与外加直流电源相接,换向片与电枢导体相接。 直流伺服电动机的工作原理与一般直流电动机的工作原理是完全相同,如图4-4所示。他激直流电机转子上的载流导体(即电枢绕组),在定子磁场中受到电磁转矩M的作用,使电机转子旋转。由直流电机的基本原理分析得到: n=(u-I a R a)/k e 式中:n──电枢的转速,r/min; u──电枢电压; I a ──电机电枢电流; R a──电枢电阻; k e──电势系数(k e=C eφ)。 由式中可知,调节电机的转速有三种方法: (1)改变电枢电压u 。调速范围较大,直流伺服电机常用此方法调速; (2)变磁通量φ(即改变k e的值)。改变激磁回路的电阻R f以改变激磁电流I f,可以达到改变磁通量的目的;调磁调速因其调速范围较小常常作为调速的辅助方法,而主要的调速方法是调压调速。若采用调压与调磁两种方法互相配合,可以获得很宽的调速范围,又可充分利用电机的容量。 (3)在电枢回路中串联调节电阻R t(图中无表示),此时有 n=[u-I a(R a+R t)]/k e 从式中可知,在电枢回路中串联电阻的办法,转速只能调低,而且电阻上的铜耗较大,这种办法并不经济,仅用于较少的场合。
伺服电机工作原理 1.伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。 直流伺服电机分为有刷和无刷电机。有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。 无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。 2.交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。大惯量,最高转动速度低,且随着功率增大而快速降低。因而适合做低速平稳运行的应用。 3.伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成
电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降 交流伺服要好一些,因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。 永磁交流伺服电动机 20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。交流伺服驱动装置在传动领域的发展日新月异。永磁交流伺服电动机同直流伺服电动机比较,主要优点有: ⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。 ⑵定子绕组散热比较方便。
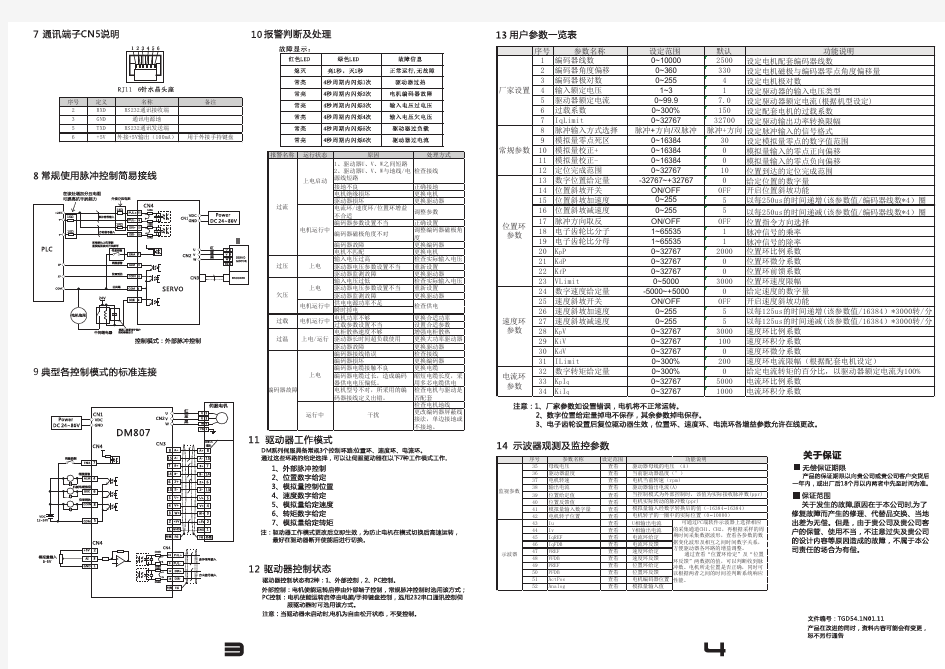
To &e 朴ut nfr man servo on &Qml cwTrnM off v by 胡5珥2 Err 匚口由ET5h 定 Fffhe 1 Tn pi t an r edit shock c^nr 电匚.1 lhe protecti/e earth (FE n terminal of rhe g=r^o ampirisrto the Drci^ecdva Barth t^E) cl :he contrcl 5* 2. Tris tarcjit a 匚?Alieis tc :h& servo rr 宙!x GlactrcHTiaTiGtc tmlro 5: CoimectiDii dbagram Foi the pin en the ajupliiier side, I'^fer t? S^CZIQE 3.&.1. ■ Zucoder cable olless Lho 30m When fabricating an encoder cable, use the MR-ECNM connector set. Referring to th.e following wiring diagram , you can fabricate an encoder cable of up w less than 30m Note 柚e sn enccxfef cable 旧 grimed th s wre is nert 优订uiird Servoi tnctor HC I1FE13 3:-^73 Bl
MR-E-200A 和HC-SE-152 的接线图 总接线图参考上面的,编码器接线如下: 2 Ccimectiaii iia^rain For ihE pm as3i?yiiner:T QH ihe imp liter =i^. i圮%r 3.31 ■ Encoder cabk less than 3Ona When 31?icMinf an encoder cable, uce the MR'ECNS 伺服电机工作原理图 伺服电机工作原理——伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。 永磁交流伺服系统具有以下等优点:(1)电动机无电刷和换向器,工作可靠,维护和保养简单;(2)定子绕组散热快;(3)惯量小,易提高系统的快速性;(4)适应于高速大力矩工作状态;(5)相同功率下,体积和重量较小,广泛的应用于机床、机械设备、搬运机构、印刷设备、装配机器人、加工机械、高速卷绕机、纺织机械等场合,满足了传动领域的发展需求。 永磁交流伺服系统的驱动器经历了模拟式、模式混合式的发展后,目前已经进入了全数字的时代。全数字伺服驱动器不仅克服了模拟式伺服的分散性大、零漂、低可靠性等确定,还充分发挥了数字控制在控制精度上的优势和控制方法的灵活,使伺服驱动器不仅结构简单,而且性能更加的可靠。现在,高性能的伺服系统,大多数采用永磁交流伺服系统其中包括永磁同步交流伺服电动机和全数字交流永磁同步伺服驱动器两部分。伺服驱动器有两部分组成:驱动器硬件和控制算法。控制算法是决定交流伺服系统性能好坏的关键技术之一,是国外交流伺服技术封锁的主要部分,也是在技术垄断的核心。 2 交流永磁伺服系统的基本结构 交流永磁同步伺服驱动器主要有伺服控制单元、功率驱动单元、通讯接口单元、伺服电动机及相应的反馈检测器件组成,其结构组成如图1所示。其中伺服控制单元包括位置控制器、速度控制器、转矩和电流控制器等等。我们的交流永磁同步驱动器其集先进的控制技术和控制策略为一体,使其非常适用于高精度、高性能要求的伺服驱动领域,还体现了强大的智能化、柔性化是传统的驱动系统所不可比拟的。 目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,其优点是可以实现比较复杂的控制算法,事项数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。 松下伺服电机接线总结 伺服驱动器型号:MDDHT5540 伺服电机型号:MSME152G1H 运动控制卡型号:PCI-1240 1、主电路 工作原理:按下空气开关MCCB后,控制电路L1C、L2C先得电。此时ALM+引脚有输出,ALM回路控制的回路接通,ALM回路的继电器控制的开关ALM 闭合。软件开关通过程序控制主电路的通断,正常运行情况下一直运行。此时只要按下开始按钮ON,电磁接触器线圈主电路瞬间接通,电磁接触器线圈MC得电后,使电磁接触器控制的开关MC闭合,此时即使开始按钮ON断开,由于电路的自锁作用,主电路仍然接通。 2、脉冲发送电路 接线根据: 运动控制卡PCI-1240给出的控制卡功能模块图如下图所示 由图可知,运动控制卡输出脉冲的方式为长线驱动方式。 松电机下伺服使用手册中P3-35(P151)中提到长线驱动接线端子说明如下图 手册P3-18(P134)给出的长线驱动接线方法如下图 3、编码器反馈脉冲接收电路 接线原理:关于利用伺服驱动器输出的ABZ相脉冲计算伺服电机的旋转角度(参考 网址:http://bbs.gongkong1/Details/201910/2019103112034201901-1.shtml)推荐做法:先将OA、OB脉冲四倍频(类似于DSP的QEP计数模块),具体实现的时候只需要记住OA、OB的每个脉冲跳变即可实现四倍频,同时要辩相,一般我们定义OA超前OB为电机旋转正方向,此时脉冲累加,否则为负方向,脉冲累减。知道了脉冲个数就好办了,如果松下伺服输出的脉冲个数为一圈2500个,由于我们四倍频了,故实际到我们这里就应该是10000个没圈,根据这个脉冲你就可以知道电机的相对位置。根据OC信号,你可以知道电机的绝对位置,一般定义OC出现的时刻就是电机转子的零位,因此每次检测到OC出现,就应该认为绝对位置出现,这样可以清除累积误差。根据收到的脉冲数,采用M法测速也可以计算出实际电机的转速。 接线根据: 伺服驱动器说明书P3-32(P148)给出的接线说明伺服电机工作原理图
松下伺服器接线总结..-共27页
相关主题
文本预览