ARM 环境搭建步骤
一:安装软件
1)先安装jre-6u7-windows-i586-p-s.exe
2)再安装yagarto-bu-2.21_gcc-4.6.2-c-c++_nl-1.19.0_gdb-7.3.1_eabi_20111119.exe 3)再安装yagarto-tools-20100703-setup.exe
4)最后安装setup.exe
5)用eclipse.exe 程序来测试是否安装成功,只要能进入,那么安装成功;
二:仿真器驱动安装
1)将仿真器与电脑连接
2)弹出usb安装窗口,选择自主安装,路径选择到DRIVER所在文件位置
3)安装,会安装三次
三:开发板的接通
1)开发板断电,将开发板与电脑相连,先不连USB数据线
2)将跳线开关置于初始状态(开关全在1234面)
3)使用来确定连通,步骤为:
1.首先,查看是否连接成功:在设备管理器中查看
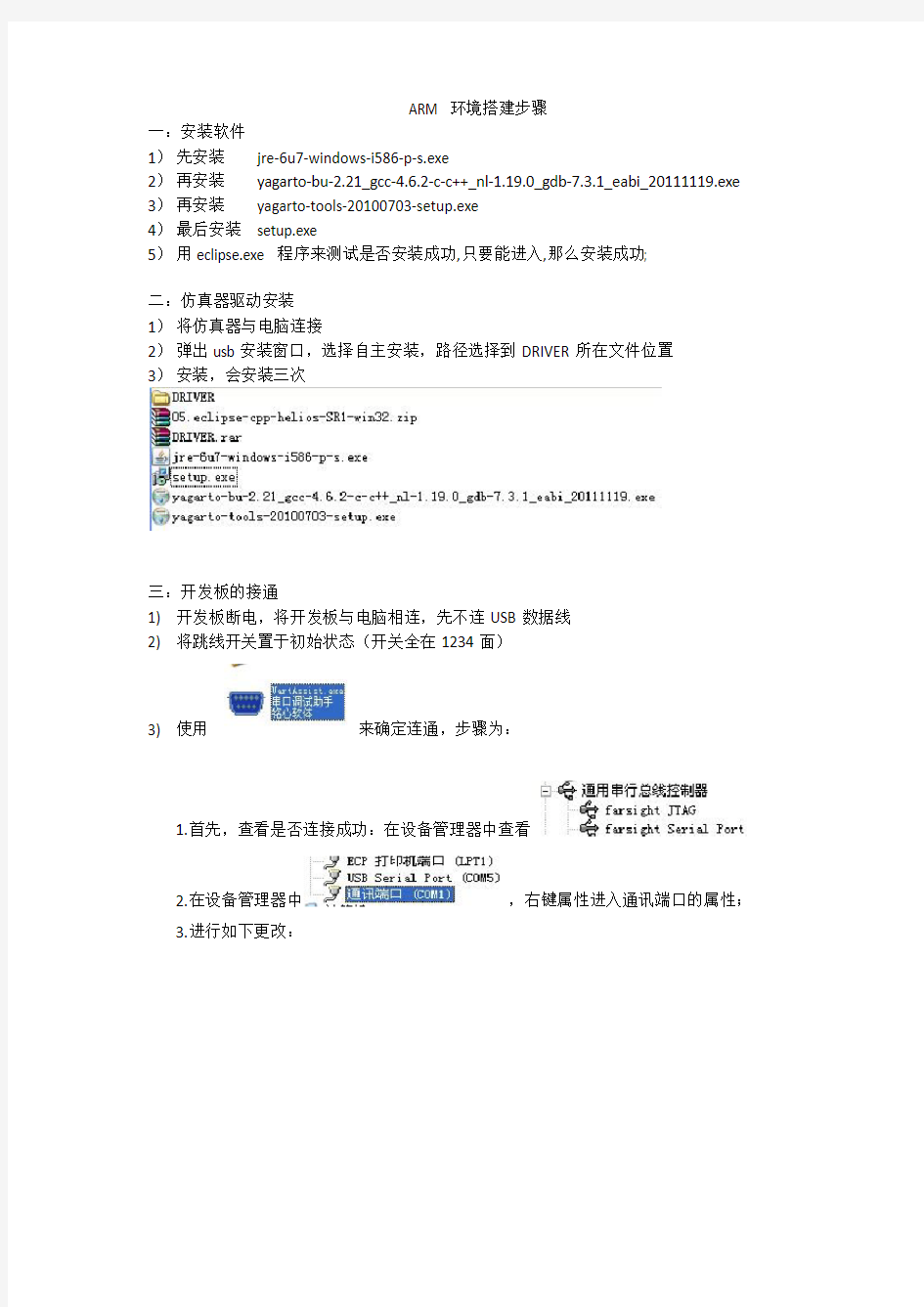
2.在设备管理器中,右键属性进入通讯端口的属性;
3.进行如下更改:
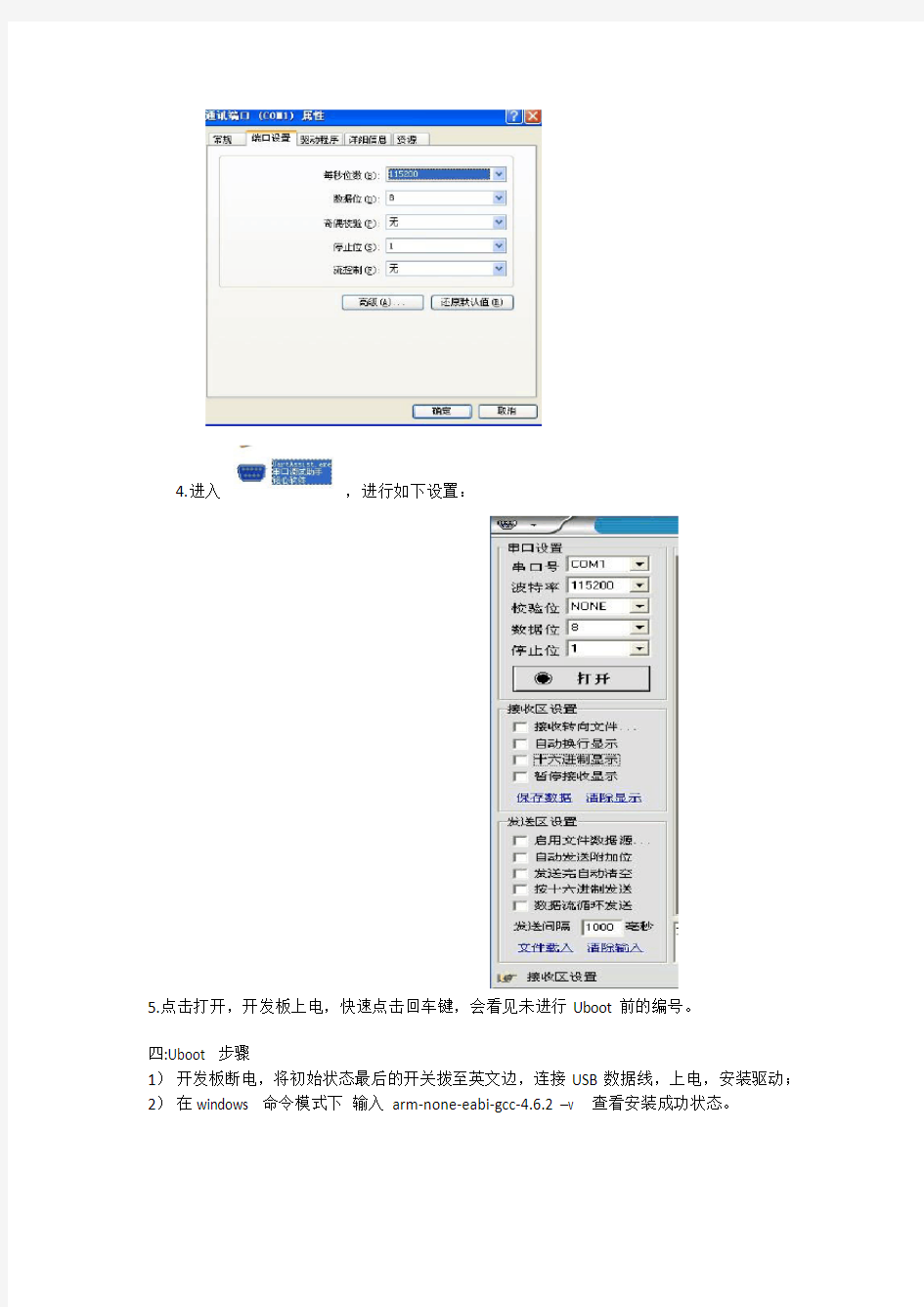
4.进入,进行如下设置:
5.点击打开,开发板上电,快速点击回车键,会看见未进行Uboot前的编号。
四:Uboot 步骤
1)开发板断电,将初始状态最后的开关拨至英文边,连接USB数据线,上电,安装驱动;2)在windows 命令模式下输入arm-none-eabi-gcc-4.6.2 –v 查看安装成功状态。
3)进入
4)开发板断电,设置,进入option,进行如下设置:
5)开发板上电,进入,点击connect。
6)进入,点击transmat ->Transmat 选择Uboot的.bin 文件,顺序不能错,顺序为下图由下到上传送:
1.先传送USB Installer_DDR
2.bin
2.再传送u-boot-dnw.bin 在倒计时结束之前快速点击回车, 输入:dnw 20008000
回车
3.最后传送u-boot.bin 输入nand erase 0 40000 回车;nand write 20008000 0 40000 回
车。
4.断电,拨回初始状态,启动,快速回车,查看是否成功。
5.取消倒计时:setenv bootcmd 回车;save 回车。
实验报告 课程名称:嵌入式系统 学院:信息工程 专业:电子信息工程 班级: 学生姓名: 学号: 指导教师: 开课时间:学年第一学期
实验名称:IO接口(跑马灯) 实验时间:11.16 实验成绩: 一、实验目的 1.掌握 STM32F4 基本IO口的使用。 2.使用STM32F4 IO口的推挽输出功能,利用GPIO_Set函数来设置完成对 IO 口的配置。 3.控制STM32F4的IO口输出,实现控制ALIENTEK 探索者STM32F4开发板上的两个LED实现一个类似跑马灯的效果。 二、实验原理 本次实验的关键在于如何控制STM32F4的IO口输出。IO主要由:MODER、OTYPER、OSPEEDR、PUPDR、ODR、IDR、AFRH和AFRL等8个寄存器的控制,并且本次实验主要用到IO口的推挽输出功能,利用GPIO_Set函数来设置,即可完成对IO口的配置。所以可以通过了开发板上的两个LED灯来实现一个类似跑马灯的效果。 三、实验资源 实验器材: 探索者STM32F4开发板 硬件资源: 1.DS0(连接在PF9) 2.DS1(连接在PF10) 四、实验内容及步骤 1.硬件设计 2.软件设计 (1)新建TEST工程,在该工程文件夹下面新建一个 HARDWARE文件夹,用来存储以后与硬件相关的代码。然后在 HARDWARE 文件夹下新建一个LED文件夹,用来存放与LED相关的代码。 (2)打开USER文件夹下的test.uvproj工程,新建一个文件,然后保存在 LED 文件夹下面,保存为 led.c,在led.c中输入相应的代码。
(3)采用 GPIO_Set 函数实现IO配置。LED_Init 调用 GPIO_Set 函数完成对 PF9 和 PF10 ALIENTEK 探索者 STM32F407 开发板教程 119 STM32F4 开发指南(寄存器版) 的模式配置,控制 LED0 和 LED1 输出 1(LED 灭),使两个 LED 的初始化。 (4)新建一个led.h文件,保存在 LED 文件夹下,在led.h中输入相应的代码。 3.下载验证 使用 flymcu 下载(也可以通过JLINK等仿真器下载),如图 1.2所示: 图1.2 运行结果如图1.3所示:
拆字程序 Org 0000h Mov A , 2000H Add A ,#F0H MOV 2001H ,A MOV A ,2000H ADD A , #0FH MOV 2002H , A MOV A , 2001H ADD A , 2002H END 拆分BCD 码 ? *************************************************************************** ;此程序是用单片机的p1口接八个led灯作跑马灯试验,八个led依次亮了又熄灭,形成漂亮;的跑马灯。本人已经试验成功。 ;单片机教程网https://www.doczj.com/doc/f43568711.html, 原创
;该8路单片机跑马灯程序代码简单,电路也容易搭建,只需把led接在p1口上就可以了,希望大家能试验成功顺利的完成跑马灯报告 ;*************************************************************************** org 0000h loop0:cjne r0 ,#01h,rel,loop0 ;判断开关打开情况 ajmp start;跳转到程序开始 org 0030h;定义起始汇编地址 start: mov a,#0ffh ; clr c ; mov r2,#08h ;循环八次。 loop: rlc a ;带进位左移。 mov p1,a ;此时led灯开始有反映了。 call delay ;延时 djnz r2,loop ;循环(djnz条件判断) mov r2,#07h ; loop1: rrc a ;带进位右移 mov p1,a ;此时led灯开始有反映了。 call delay ; djnz r2,loop1 ;反复循环 jmp start ;回到程序的开头 delay: mov r3,#20 ;延时子程序 d1: mov r4,#20 d2: mov r5,#248 djnz r5,$ djnz r4,d2 ```````````````````````````````````````````````---------3路单片机跑马灯程序---------------------------------------
实验三搭建嵌入式系统开发环境 一、实验目的: 1.掌握嵌入式开发环境的配置; 2.掌握开发工具链的安装与配置; 3.掌握嵌入式系统内核和根文件系统的烧写的过程。 二、实验内容: 1)安装配置嵌入式开发环境; 2)安装与配置工具链; 3)内核和根文件系统的烧写 三、实验设备及工具: 硬件:UP-NETARM2410-S嵌入式实验仪、PC机pentumn500以上、硬盘40G以上、内存大于256M。 软件:PC机操作系统Red Hat Enterprise Linux 4、MINICOM 、AMRLINUX开发环境。 四、实验步骤: 1.共享windows下内核文件至linux环境下,并将文件复制至个人开发目录中 2.进入目录,输入make menuconfig,对内核进行裁剪配置 3.编译内核之前输入make clean清理编译环境 4.输入make dep 编译相关依赖文件 5.输入make zImage 输出最终编译后的镜像文件 6.将镜像文件共享至windows环境下 7.在windows打开超级终端,进入vivi,将镜像文件烧录至实验箱开发板中 五、实验总结: 通过本次实验,熟悉了Linux 开发环境,学会了如何进行linux内核的烧写。在实验
过程中了解到Linux内核模块的组成结构,通过本次实验,初步了解嵌入式开发的基本过程。 实验四嵌入式驱动程序设计 一、实验目的: 1.学习在LINUX 下进行驱动设计的原理 2.掌握使用模块方式进行驱动开发调试的过程 二、实验内容: 在PC 机上编写简单的虚拟硬件驱动程序并进调试,实验驱动的各个接口函数的实现,分析并理解驱动与应用程序的交互过程。 三、实验设备及工具: 硬件:UP-NETARM2410-S嵌入式实验仪、PC机pentumn500以上、硬盘40G以上、内存大于256M。 软件:PC机操作系统Red Hat Enterprise Linux 4、MINICOM 、AMRLINUX开发环境。 四、预备知识: 1.有 C 语言基础。 2.掌握在Linux 下常用编辑器的使用。 3.掌握Makefile 的编写和使用。 4.掌握Linux 下的程序编译与交叉编译过程。 5.有驱动开发的基本知识。 五、实验步骤: 1.进入/arm2410cl/exp/drivers/01_demo,使用vi 编辑器或其他编辑器阅读理解源代码 2.使用makefile编译驱动模块与测试程序,编译器采用armv4l-unknown-linux-gcc 3.将编译后的驱动模块demo.o和测试程序test_demo挂载到实验箱上 4.插入驱动模块demo.o 执行命令insmod demo.o 5.查看驱动是否插入成功,执行命令lsmod demo.o 6.运行测试程序,查看执行结果
第一章Ubuntu 8.10的安装和网络配置 1.安装虚拟机软件Vmware 6.0.2 虚拟机安装版本Vmware 6.0.2的版本 在winxp操作系统下用鼠标双击VMware-workstation-6.0.2-59824图标,开始安装虚拟机Vmware,如下图所示: 双击VMware-workstation-6.0.2-59824图标,出现vmware的安装界面,所有的选项都采用默认值,用鼠标点【下一步】,然后出现安装进度条,系统开始安装vmware,等待安装完成后,出现如下安装完成界面: 用鼠标点【Finish】,虚拟机安装完成。系统提示重新启动计算机,选择【是】重新启动计算机,电脑重新启动后,虚拟机安装完成。 2.新建虚拟机 打开Vmware虚拟机软件,选【File】->【New】->【Virtual Machine】,弹出新建虚拟机向导对话框,注意以下几个重要的选项,其他都采用默认选项即可。 选择操作系统和版本,如下图所示:
选择虚拟机名称和存放的路径,如下图所示: 设置虚拟机硬盘大小为20G ,如下图所示:
点击【完成】按钮,这样我们就新建了一个虚拟机,下面我们设置一下虚拟机的内存,步骤如下: 点击虚拟机Vmware的【VM】->【settings】时菜单,弹出虚拟机设置对话框,设置虚拟机使用的内存为512M或1024M,如下图所示:
点击【OK】按钮,这样我们就新建了一个虚拟机,该虚拟机的硬盘为20G, 内存为512M .接着我们就可以在该虚拟机上安装ubuntu操作系统了。 注: 键盘和鼠标控制权在虚拟机和Windows系统之间的切换是通过组合键【Ctrl】+【Alt】来实现的。 3 安装Linux操作系统ubuntu Ubuntu安装版本ubuntu 8.10 点击vmware软件工具栏上的【绿色箭头】启动虚拟机,如下图所示:
实训总结 班级:卓越1301姓名:刘* 短短三周的很快就过去了,在中软国际嵌入式方向班的第二次实习马上就要结束了。虽然只有短短的三周,但我学会了很多知识,学习了在Linux-Fedora14操作系统 的环境下完成基于Smart210SDK开发板和DS18B20的温度采集及显示系统还有按键控制LED灯并实现开机和关机的相关功能,这些知识让我们对嵌入式有了更进一步的了解与熟悉。 作为一名大学生,纵观现在的就业形势,国家高校的扩招,世界金融危机的 横扫,大学生应该有一种居安思危的紧迫感,特别是对已经度过几年大学的我来说,毕业并不是一个遥远的词汇。宝剑锋从磨砺出,梅花香自苦寒来,缺少了平时的锻炼,没有厚积当然不能有薄发。首先我得有思想上的紧迫感,在学校学习的都是理论知识,实践经验则是少之又少。综合能力强的人才才是这个社会需要的,成长成为社会需要的人才是我的个人奋斗目标。有了强大的精神动力,有了坚如磐石的毅力,相信成功并不遥远。 首先,通过这些天的实训我学到了很多知识。这一阶段在Linux-Fedora14操作系统的环境使用Smart210SDK开发板做一些程序设计并烧写到SD卡中通过 Smart210SDK开发板来实现程序的执行,通过对Smart210SDK开发板的一步一步的 熟悉和了解我们开展了嵌入式的基本的程序烧写、调试、执行这些相关的锻炼过程。 最后我们做了两个项目: 第一个是基于Smart210SDK开发板的按键控制LED灯并且实现开机和关机的 相关功能与实现---项目功能是:实现长按开发板上的K1键实现开机或关机,在开机状态下能够实现K1短按控制LED1的点亮与熄灭、K2短按控制LED2的点亮与熄灭、K3短按控制LED3的点亮与熄灭、K4短按控制LED4的点亮与熄灭。项目涉及 的相关技术是:相关寄存器的调用,延时子函数的调用,LED灯的初始化,实现按 键的长按与短按的控制的C语言程序的设计与实现。 第二个是基于Smart210SDK开发板和DS18B20的测量并在minicom上显示的 功能与实现---项目功能:首先实现DS18B20的初始化,然后在DS18B20中写数据、数据转换、读数据、进行数据间的格式转换,最后在minicom上显示出所读出的温度,并且实现当温度高于32°C的时候LED灯闪烁,当温度高于35°C的时候蜂鸣
摘要:AT89C51是美国ATMEL公司生产的AT89系列单片机中的一种,该 器件采用ATMEL高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。由于将多功能8位CPU和闪烁存储器组合在单个芯片中,ATMEL的AT89C51是一种高效微控制器。AT89C单片机为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。 关键字:AT89C51 兼容高效微控制器 目录 一、实训目的 (2) 二、电路设计与生成 (2) 1、设计跑马灯 (2) 2、生成PCB板 (2) 三、程序设计 (3) 1、程序设计 (3) 2、运行结果 (4) 四、实训总结 (4)
一、实训目的 了解AT89C51管脚的基本功能,学会运用Protel 99 se设计电路,并生成PCB 板,印刷线路板。使用KEIL C51设计单片机程序,生成HEX文件,将程序下载到单片机内并运行。从而达到初步掌握简单单片机小程序的设计,制作,调试的目的。 二、电路设计与生成 1、设计跑马灯 利用单片机最小系统,使P1口八个发光二极管做跑马灯和流水灯显示。设计的电路图如下: 2、生成PCB板 (1)保存电路图,单击菜单栏DESIGN项,选择其中的更新PCB; (2)在弹出的对话框中,单击preview change; (3)校对弹出界面中的相关元件的信息,再单击Execute,生成元器件;(4)最后对生成的元器件进行排版,生成如下图所示:
三、程序设计 1、程序设计 #include"reg51.h" unsigned char tab[]={1,2,4,8,0x10,0x20,0x40,0x80,0x80,0x40,0x20, 0x10,8,4,2,1}; void delay(unsigned char n) { unsigned int d; unsigned char i; for(i=0;i 嵌入式linux开发环境的建立 一、创建文件:vi hello.c如下: 二、安装交叉编译器: arm-linux-gcc-3.4.6-glibc-2.3.6.tar 步骤1、把交叉编译链考贝到任意目录下,并解压:tar zxvf arm-linux-gcc-3.4.6-glibc-2.3.6.tar –C / 2、把以上路径添加到/etc/profile文件的最后:export PATH=$PATH:/gcc-3.4.6-glibc-2.3.6/arm-linux/bin 3、输入命令使环境变量立即生效:source /tec/profile 4、测试是否安装成功:arm-linux-gcc–v 如果显示版本号,则安装成功。 5、编译C文件:arm-linux-gcc hello.c–o hello 三、配置tftp服务步骤 1、检查系统有无安装包:用命令:rpm –aq | grep tftp,如有安装包的版本号,说明系统已有相应的安装包; 2、配置服务器,打开文件:vi /etc/xinetd.d/tftp,显示如下桌面service tftp { socket_type = dgram protocol = udp wait = yes user = root server = /usr/sbin/in.tftpd server_args = -s /tftpboot disable = yes } 然后编辑将disable改为no,其他不变 3、重启xinetd服务:service xinetd restart, 停止 xinetd: [ 确定 ] 启动 xinetd: [ 确定 ] 4、输入如下命令:netstat –a | grep tftp,如果出现如下画面 嵌入式实验心得体会 嵌入式实验心得体会是计算机专业应该具备的常用知识,以下这篇范文整理个人对嵌入式系统的认识,和进行操作之后的个人体会,对操作的疑难的反思。下面是这篇嵌入式实验心得体会 嵌入式实验心得体会 学期开始,我们开始学习《嵌入式系统及应用》,由于初次接触嵌入式系统,感觉蛮难的,所以收获不是很大,很多的概念都比较模糊,等到学期结束开始做嵌入式课程设计时,真是茫然无从下手,自,从拿到设计主题后,我就从像热锅像上的蚂蚁,一个字“急”。最后实在没有办“法,逼着自己去学法 习,查资料,总算对嵌入式有了资浅层理解。浅 嵌入式系统本本身是一个相对模糊的定义义,一个手持的mp3和一个一pc104的微型工业业控制计算机都可以认为是嵌入是式系统。总体来说,嵌入式系统是“用于控,制,监视或者辅制 助操作机器器和设备的装备”。一个典典型的桌面linux系统统包括3个主要的软件层---linux-内核、cc库和应用程序代码。内核核是唯一可以完全控制硬件的层,内核驱动程序代件表应用程表序与硬件之间进行行会话。内核之上是c 库,,负责把posixapii转换为内核可以识别的形形式,然后调用内核,从应应用程序向内核传递参数。应用程序依靠驱动内核。来完成特定的任务。来在了解了基础知识之后,我了开始进行上机操作,当然开,,其中遇到很多的难题,很多东西都是第一次接触很,又没有别,人在旁边指导操作,完全凭借自己去摸操索索练习。其中的困难可想而知。然而坚持就是胜利而,,牙一咬眼一闭坚持做下去去,而通过本次实验,我感觉收获还是蛮多的。可感能我对于嵌入能式的知识学习的还是不太多,但是这习之外的东西收获颇丰。之 目录 一、了解跑马灯............................. .... . (2) 二、AT89C52 单片机 ........................... .3 三、识别与检测元器件 (4) 四、电路设计...................................... (4) 1. 单片机最小应用系统 (4) 2. 复位电路图..................................... .5 3. 彩灯原理图 (6) 4. 彩灯仿真图 (7) 5. 彩灯布局图 (8) 五、焊接电路 (8) 六、程序流程 (9) 七、跑马灯程序 (10) 八、下载调试程序 (10) 九、实训总结 (11) 十、微控制器应用技术实训评价表 (12) 、了解跑马灯 在生活和生产的各领域中,凡是有自动控制要求的地方都会有单片机的身影出现;从简单到复杂,从空中、地面带地下,凡是能想象到的地方几乎都有使用单片机的需求。现在尽管单片机的应用已经很普遍了,但仍有许多可以用单片机控制而没有实现的项目,因此,单片机的应用大有想象和拓展空间。单片机的应用有利于产品的小型化、多功能化和智能化,有助于提高劳动效率,减轻劳动强度,提高产品质量,改善劳动环境,减少能源和材料消耗,保真安全等。但是单片机应用的意义绝不仅限于它的广阔范围以及所带来的经济效益上,更重要的意义还在于单片机的应用正从根本上改变者传统的控制系统设计思想和设计方法。从前必须有模拟电路或数字电路实现的大部分功能,现在 已能使用单片机通过软件方法来实现了。这种以软件取代硬件并提高系统系能的控制系统是一种全新的概念,是对传统控制技术的一次革命。随着单片机应用的推广普及,微控制技术必将不断发展、日益完善和更加充实。 在众多的微控技术实验中,老师为我们选择了用单片机制作8个灯的跑马机这一较为基本的科目,单片机使用我们熟悉的AT89C52型单片机,采用覆铜板手工焊制的方法来制作电路板,使用Proteus进行仿真。 本设计选择采用AT89C51单片机为核心。AT89C51是一个低电压、高性能CMOS8 位单片机带有K字节的可反复擦写的程序存储器。和128字节的存取数据存储器RAM这种器件采用ATMEL公司的高密度、不容易丢失存储技术生产,并且能够与MCS-51系列的单片机兼容。片内含有8位中央处理器和闪烁存储单位,有较强的功能的AT89C51单片机能够被应用到控制领域中AT89C51提供以下的功能标准:4K字节闪烁存储器,128字节随机存取数据存储器,32个I/O 口,2个16位定时/计数器,1个5向量两级中断结构,1个串行通信口,片内振荡器和时钟电路。另外,AT89C51还可以进行OHZ的静态逻辑操作,并支持两种软件的节电模式。闲散方式 停止中央处理器的工作,能够允许随机存取数据存储器、定时/计数器、串行通信口及中断系统继续工作。掉电方式保存随机存取数据存储器中的内容,但振荡器停止工作 并禁止其它所有部件的工作直到下一个复位。 实验三ARM编程环境熟悉及寻址方式实验 注意:本实验在模拟环境下进行!! 一、实验目的: 1、进一步熟悉ARM的编程工具MDK; 2、深刻理解ARM汇编指令中标号的本质; 3、熟悉ARM寻址方式(寄存器寻址、寄存器间接寻址等); 二、实验步骤: 1、参照实验二的步骤,建立工程exp 2、设置工程、建立源文件 exp2.s并将其添加到工程,在exp2.s中输入如下代码(可复制):;广州大学华软软件学院 ;文件名:exp2.s ;功能: ;作者: ;日期: ;修改: area init,code,readonly entry ldr r0,=data1;将标号data1的值送给r0 ldr r1,=data2; ldr r2,=data3 ldr r0,[r0] ldr r1,[r1] add r0,r0,r1 str r0,[r2] b .;相当于while(1) data1 dcd 12;定义一个字,初值为12 data2 dcd 13;定义一个字,初值为13 data3 dcd 0;定义一个字,初值为0 end 2、编译正确后调试(可参照实验二),注意Ro_Base设置为 0x30000000,点击下图菜单中的菜单项,调出内存单元观察窗口。 会弹出如下界面: 点击current,就会看到当前模式下的寄存器 按F10进行单步调试,同时观察寄存器中的变化; 反汇编界面: 出现如下界面:鼠标右键,如图选中,即可看到源代码的反汇编窗口。 我们发现data1代表的地址是0x30000020,data2代表的地址是0x30000024,data3代表的地址是0x30000028。好,我们现在通过memory窗口来查看这些内存单元的内容: 在存储单元窗口输入0x30000020(如下图所示),观察存储单元中的 值,是不是我们程序所运行的结果呢? 嵌入式开发,通常都是在Linux环境下编译Uboot、Linux和android代码。编译uboot/Linux可以选择任何的Linux发行版,如redhat,suse,ubuntu,fedora,debian等,只要你配置好ARM交叉工具编译工具就可以了。 编译android,搭建环境最容易的就是ubuntu。google的官方网站上,也有搭建编译android的简单介绍,可以搜索下,网络上有相当多这方面的说明。 考虑到我们学习嵌入式的平台是Fast Models,以及自动的Realview EB模型硬件平台。而ARM官方推荐是在Redhat Enterprise(4,5,6)下安装Fast Models。所以,我们采用Redhat Enterprise 6作为开发环境。我们可以直接在电脑上安排RHEL6,也可以先安装vmware,然后在vmware中创建一个虚拟机,在虚拟机上安装RHEL6。在这里,小编是采用后者方式。 搭建Redhat Enterprise 6开发环境,建议做以下配置: 1)设置静态IP。在之前使用vmware的经历,发现如何网站采用dhcp方式,那么rhel6的IP地址有可能会发现改变。而我们需要网络IP最好是固定的,所以需要设置静态IP。RHEL6的静态IP的设置方法,可以搜索到。 2)开启ssh,samba服务 ARM嵌入式开发,基本上都是在命令(shell)方式下进行的,不需要图形界面。所以,在windows上运行vmware,vmware上虚拟机再运行rdel6的情况下,为了不增加windows系统的负荷,可以把vmware放在后台运行,使用ssh服务登陆到rdel6就可 以进行嵌入式开发了。 小编在开发嵌入式时,通常都是使用sourceinsight阅读、修改代码,然后在shell运 行命令进行编译。所以,开通samba服务,然后使用windows已安装的sourceinsight 工具,阅读放在rdel6上的Linux/uboot代码。 在Redhat发行版下,有关服务器的开启或关闭,可以在root用户下,使用setup命 令进入配置选项的“System Services”菜单下进行设置。 samba服务在菜单选项为:“smb”;ssh服务在菜单选项为:“sshd” 需要注意的是:windows下,要使用ssh服务/samba服务登陆vmware虚拟机上的rhel6,必须把rhel6上的防火墙关掉。setup命令--->Firewall Configuration--->去掉Enable。 嵌入式实验报告心得 篇一:嵌入式系统原理实验总结报告 嵌入式系统原理实验总结报告 车辆座椅控制系统实验 XX/5/23 嵌入式系统原理实验总结报告 一、技术性总结报告 (一)题目:车辆座椅控制系统实验(二)项目概述: 1.为了实现车辆座椅控制的自动化与智能化。 2.方便用户通过智能手机与车载传感器之间的联动。 3.使车辆作为当今物联网中重要的一个节点发挥作用。 4.通过车辆座椅控制系统实验实现对嵌入式系统原理课程的熟练掌握与对嵌入式系统原理知识的深化记忆。 5. 加强本组学生对嵌入式系统原理的更深层次的理解与运用。 (三)技术方案及原理 本次试验分为软件、硬件两个部分。 1.软件部分。 A.智能手机部分,包括通过智能手机对座椅的控制部分、手机所携带的身份信息部分。 本部分软件使用Java编写,其程序部分为:主程序:package ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ; import ;import ; import ; import ; public class MainActivity extends ActionBarActivity { private Button Up = null; private Button Left = null; private Button Dowm = null; private Button Right = null; private Socket socket = null; private static final String HOST = "";private static final int PORT = 10007; public void onCreate(Bundle savedInstanceState) { super.onCreate(savedInstanceState); setContentView(; initControl();} private void initControl() { 单片机课程设计报告-跑马灯 武汉纺织大学 单 片 机 课 程 设 计 报 告 设计课题:跑马灯 指导教师:刘丰 姓名:颜珊曹坤 班级:应电092 一、设计任务 利用单片机制作让LED灯依次闪烁时间间隔为0.5S二次后时间加快为 0.2S并循环闪烁的跑马灯. 二、设计要求 (1)采用单片机STC89C52来控制,下载器由芯片MAX232来对程序的下载。 (2)LED灯的闪烁间隔时间为0.5S-0.25S-1S,每循环两圈更改闪烁速度。 (3)供电采用USB方口的方式。 三、方案设计与论证 跑马灯电路的组成方框图为: 四,主要元件介绍 (1)单片机STC89C52引脚介绍 stc89c52的内核和AT51系列单片机一样,故引脚也相同: 1~8:I/OP1口(P1.0~P1.7); 9:复位脚(RST/Vpd); 10~17:I/OP3口(P3.0=RXD,P3.1=TXD,P3.2=-INT0,P3.3=-INT1,P3.4=T0,P3.5=T1,P3.6=-WR,P3.7=-RD)主要是此引脚; 18、19:晶振(18=XTAL2,19=XTAL1);20:地(Vss); 21~28:I/OP2口(P2.0~P2.7); 29:-PSEN; 30:ALE/-PROG; 31:-EA/Vpp 32~39:I/OP0口(P0.7~P0.0); 40:+5V电源。 注:引脚功能前加“-”,说明其是低电平有效。如P3.2=-INT0。 (2)MAX232介绍 MAX232芯片是美信公司专门为电脑的RS-2 32标准串口设计的接口电路,使用+5v单电源供电。 实验1:嵌入式Linux开发环境 一、实验目的 熟悉Linux开发环境,学会基于S3C2410的Linux开发环境的配置和使用。使用Linux的armv4l-unknown-linux-gcc编译,使用基于NFS方式的下载调试,了解嵌入式开发的基本过程。 二、实验内容 1、在linux系统下,利用C语言来编写应用程序,并进行交叉编译,生成可在目标实验台上运行的目标文件。 2、建立宿主机与目标实验台仿真终端连接,为目标实验台建立Linux系统终端窗口。 3、建立宿主机与目标实验台的共享连接,以便下载和运行最终可执行文件。 三、预备知识 C语言的基础知识、程序调试的基础知识和方法,Linux的基本操作。 四、实验设备及工具(包括软件调试工具) 硬件:UP-NETARM2410-S嵌入式实验平台、PC机Pentium 500以上, 硬盘10G以上。 软件:PC机操作系统REDHAT LINUX 9.0+MINICOM+ARM-LINUX开发环境 五、主要实验步骤: 1、打开PC宿主机电源,选择进入Linux系统。在PC宿主机的/arm2410s/exp/Basic目录中创建用户个人工作目录,例如“cao”。 2、单击鼠标右键选择“新建终端”,建立宿主机Linux命令终端窗口,在[root@localhost root]#命令提示符下进入个人工作目录“cao”中。 即:[root@localhost root]#cd /arm2410s/exp/basic/cao 3、利用“vi”编辑hello应用程序,并保存为hello.c文件。 即:#cd /arm2401s/exp/Basic/cao #vi hello.c 进入vi编辑窗口,编辑hello.c文件…… 4、利用“gcc –o”命令对hello.c文件进行编译,生成可在PC宿主机上执行的目标文件hello.pc。 即:#gcc –o hello.pc hello.c, 为了验证结果正确性,可在PC宿主机上执行hello.pc文件。 即:#./hello.pc 5、为了在实验台上下载运行hello文件,需要对hello源文件进行交叉编译,以便生成能够在实验台上运行的目标文件。利用“armv4l-unknown–Linux-gcc –o命令”进行交叉编译,生存目标文件hello.o。 即:# armv4l-unknown-Linux-gcc -o hello.o hello.c (注意:这里的“armv4l-unknown–Linux-gcc –o”交叉编译命令输入方法是使用键盘输 嵌入式实训报告 班级:电子信息1301 :钟海明 学号:3138702144 同组人:胡晓海 指导老师:韦龙新 目录: 一、实训目的---------------------3 二、实训要求---------------------3 三、实训容---------------------3 1、嵌入式系统开发环境的搭建----------3 2、嵌入式程序的编译与下载------------3 3、uboot的移植----------------------4 4、linux核的移植------------------4 5、NFS网络文件挂载------------------5 6、FTP和TFTP的运用-----------------6 7、试验箱镜像的烧写-----------------7 8、串口实验和TCP实验同时传送AD值--7 四、实训心得体会及体会----------8 一、实训目的: 学习和掌握ARM嵌入式Linux系统的体系结构和基本指令,熟悉Linux下的设计流程和编程流程,能够实现一定功能的嵌入式的设计,为之前的理论课程实践验证和为今后的学习及将来从事的技术工作打下一定的基础。 二、实训要求: 1、嵌入式系统开发环境的搭建 2、嵌入式程序的编译与下载 3、uboot的移植 4、linux核的移植 5、NFS网络文件挂载 6、FTP和TFTP的运用 7、试验箱镜像的烧写 8、串口实验和TCP实验同时传送AD值 三、实训容: 1、嵌入式系统开发环境的搭建: 首先在笔记本电脑下安装虚拟机VMware,安装成功后拷贝安装好的Fedora到本机上在虚拟机上找到路径打开。打开虚拟机进入Fedora选择用户为root密码为123456。交叉环境的安装,下载好arm-linux-gcc的编译包,解压安装到/opt下。 2、嵌入式程序的编译与下载: 用vi编辑一个(.C)的文件,保存退出后使用(arm-linux-gcc -o 编译后的文件名编译文件名)的指令编译,编译成功后用FTP 或TFTP将可执行文件拷贝到实验开发板中,chmod +x 文件名修改权限(./文件名)执行编译文件。 3、uboot的移植 下载U-boot的安装包,解压到/opt路径下进入u-boot。修改 单片机实训实验报告 课题:单片机实训 院系:电子信息工程学院 班级 学号: 姓名: 指导老师:熊老师、罗老师 日期:2011.6.10 一、硬件系统 1、自制单片机实验板由七部分组成: (1).8路跑马灯 (2)动态扫描共阳型数码管 (3)4X4矩阵键盘 (4)蜂鸣器 (5)4路独立键盘 (6)温度传感器 (7)I2C通信方式的EEPROM芯片24C02 二、Keil C u Vision2 简述与使用 1.打开 u Vision2 2.新建工程:菜单【project】→【New Project】选择工程存放的路径,并输入工程文件名,然后点“保存” 3.进入器件选择界面树列表框内选择“Atmel”→“AT89C52”,然后点“确定”完成器件选择。 4.编辑源程序: 新建文件:菜单【File】→【new…】。然后输入代码,编辑完成后菜单【File】→【Save】或【Save As…】把代码文件存入硬盘。C源文件存为.C后缀,汇编源文件存为.a或.src后缀,并存放在同一个工程文件夹下。 5.加入源文件到工程中: 在左边浮动窗口【File】选项卡里展开“Target 1”树,在“Source Group 1”上右键单击,弹出菜单,选【Add File to Group“Source Group 1”】,选择需要加入的源文件,点“Add”按钮加入,加入完成后按“Close”关闭。 6.设置编译选项:先选中左边浮动窗口【File】选项卡里“Target1“树节点,然后选菜单【Project】→【Options for Target “Target 1”】。 7.在弹出的“Options for Target “Target 1””对话框中选择[output]选项卡,勾选“Create HEX File”然后按“确定”完成设置。 8.按“F7”开始编译,编译成功后会在工程文件夹内生成.Hex目标文件生成的.hex文件就可以用来对AT89S52芯片进行编程和运行了。 三.STC-ISP V29 Beta5 下载软件的使用 1.连接好电源线与串口线(附件中的九孔对九孔线分别连接电脑和点偏激开发板)。 2.检查电源板上电源指示灯是否亮起,如果亮起则检查USB电源线,如果已亮则关掉电源看后面的步骤。 3.启动软件。 4.选择好STC单片机的型号(STC89CF52RC). 5.选择好你使用的计算机串口号. 6.点击OPEN FILE选择你用KEIL编译好的HEX文件. 湖南科技学院ARM嵌入式设计实验报告题目:基于ARM嵌入式系统跑马灯的设计 专业:电子信息工程 班级:电信1102班 姓名:段相辉 学号:201106002232 指导教师:陈光辉 2014年11 月 目录 摘要............................................. 错误!未定义书签。ABSTRACT .......................................... Ⅰ错误!未定义书签。 1 题目要求 (1) 2 设计软件的安装 (2) 3 开发平台的搭建 (22) 4 项目设计 (23) 4.1 设计思路概述 (2) 4.1.1 设计层次介绍 (2) 4.1.2 设计模块介绍 (3) 5总结 (6) 致谢 (25) 参考文献 (26) 附录 (27) 引言 随着生活水平的提高和IT技术的进步,8位处理器的处理能力已经不能满足嵌入式系统的需要了;而16位处理器在性能和成本上都没有很大的突破。并且在8位机的开发中,大多使用汇编语言来编写用户程序。这使得程序的可维护性、易移植性等都受到了极大的挑战。正是基于此,ARM公司适时的推出了一系列的32位嵌入式微控制器。目前广泛使用的是ARM7和ARM9系列,ARM7TDMI内核的ARM7处理器广泛应用于工业控制、仪器仪表、汽车电子、通讯、消费电子等嵌入式设备。 1、题目要求 构建嵌入式Linux开发环境,熟悉linux的命令操作,并在嵌入式Linux 开发环境中设计跑马灯。 2、设计软件的安装 2.1 VMware Player简介 (a) VMware Workstation是一个“虚拟机”软件.它使用户可以在一台机 器上同时运行多个操作系统. (b) VMware Player是VMware Workstation的精简版,最初只是虚拟机的“播放机”, 但最新版本的已经具有创建虚拟机的功能.具有体积小,使用灵活,免费等特点. (c) 多个操作系统在主系统的平台上,可像Windows应用程序那样切换.而且每个操作系统都可以进行虚拟的分区、配置而不影响真实硬盘的数据. (d) 利VMware Player创建虚拟机 对于电焊,虽然一点都不陌生,但亲手操作的机会却只有几次,因此我很庆幸能够有这样的焊接机会,进行这样的实践。 焊接看似容易,实则需要长时间练习才能掌握。刚开始的时候,手一直在抖,尤其这次焊的还是贴片电容、电阻,原器件比以前焊的小好多,用镊子的手一抖就夹不住了,拿着烙铁的手抖得都不容易将器件焊上,焊出来的焊点也特别难看,在不断尝试,不断挑战自我的过程中,我的手不抖了,也基本能掌握锡的用量了,当焊点终于不再“丑不忍睹”的时候,对焊接也没有当初的恐惧了。对自己的动手能力也有了信心。 在焊接的过程中我学到了许多以前我不知道的东西,比如,以前我只知道有电烙铁,但不知道它还有好多种类,有单用式、两用式、调温式、恒温式、直热式、感应式、内热式和外热式。松香可以将多余的锡弄下来,用酒精可以把板擦的干净些。通过视频和查找资料,知道了在焊不同的器件时用的电烙铁的头不同,比如在焊引脚时要用尖头,焊CPU时要用刀口,为防止锡将焊引脚的小孔堵住,用松香把纸条粘在小孔上,把小孔盖住,把CPU的引脚对齐,用锡先涂满两边,固定好芯片,在焊另外两边,然后用尖头的电烙铁沾着松香将多余的锡弄下来。 本次课程设计的是信号发生器,信号发生器在EDA课程,数字信号处理课程中都曾涉及,所以还是较为熟悉的,在设计之前查阅了一些相关书籍,也从网上查找了一些相关资料,程序代码中运用到了C语言,将程序加入到嵌入式结构框架中,进行定义变量,端口,设定所用的GPIO参数等等。 在焊接的过程中我不仅学到了知识,而且让我深深地体会到一个团队中各成员合作的重要性,要善于团队合作,在进行团队合作的时候,还要耐心听取每个成员的意见,每个人都有长处和短处,只有在包容别人的同时我们才可以取长补短,不断完善和不断进步,交到更多的朋友,学到更多的知识。同时还让我明白:做任何事都要一心一意,严谨认真,反复琢磨,不能畏惧,要有信心和勇气,一定要做好充分的准备。不能盲目去做,要坚持,还要学会反思跟总结,我们不是为了完成任务而完成,这还是一个学习跟提高的过程。 在大学里学的不是知识,而是一种叫做自学的能力。在这个知识爆炸的时代,知识更新太快,靠原有的一点知识肯定不行。以后的工作中肯定会用到一些新的 电子系统综合设计报告 学号 201009120229 姓名李文海年级专业 2010级电子信息工程(二) 指导 教师刘怀强 学院理学院 走马灯实验论文--《嵌入式系统技术》 1、实验目的 1、学会dp-51pro实验仪监控程序下载、动态调试等联机调试功能的使用; 2、理解和学会单片机并口的作为通用i/o的使用; 3、理解和学会单片机外部中断的使用; 4、了解单片机定时器/计数器的应用。 2、实验设备 z pc 机、arm 仿真器、2440 实验箱、串口线。 3、实验内容 z 熟悉 arm 开发环境的建立。 z 使用 arm 汇编和 c 语言设置 gpio 口的相应寄存器。 z 编写跑马灯程序。 5、实验原理 走马灯实验是一个硬件实验,因此要求使用dp-51pro 单片机综合仿真实验仪进行硬件 仿真,首先要求先进行软件仿真,排除软件语法错误,保证关键程序段的正确。然后连接仿 真仪,下载监控程序,进行主机与实验箱联机仿真。 为了使单独编译的 c 语言程序和汇编程序之间能够相互调用,必须为子程序间的调用规 定一定的规则。atpcs ,即 arm , thumb 过程调用标准(arm/thumb procedure call standard),是 arm 程序和 thumb 程序中子程序调用的基本规则,它规定了一些子程序间调 用的基本规则,如子程序调用过程中的寄存器的使用规则,堆栈的使用规则,参数的传递规 则等。 下面结合实际介绍几种 atpcs 规则,如果读者想了解更多的规则,可以查看相关的书 籍。 1.基本 atpcs 基本 atpcs 规定了在子程序调用时的一些基本规则,包括下面 3 方面的内容: (1)各寄存器的使用规则及其相应的名称。 (2)数据栈的使用规则。 (3)参数传递的规则。 相对于其它类型的 atpcs,满足基本 atpcs 的程序的执行速度更快,所占用的内存更少。 但是它不能提供以下的支持: arm 程序和 thumb 程序相互调用,数据以及代码的位置无关 的支持,子程序的可重入性,数据栈检查的支持。 而派生的其他几种特定的 atpcs 就是在基本 atpcs 的基础上再添加其他的规则而形成 的。其目的就是提供上述的功能。 2.寄存器的使用规则 寄存器的使用必须满足下面的规则: (1) 子程序间通过寄存器 r0~r3 来传递参数。这时,寄存器 r0~r3 可以记作 a0~a3。 被调用的子程序在返回前无需恢复寄存器 r0~r3 的内容。 (2) 在子程序中,使用寄存器 r4~rll 来保存局部变量。这时,寄存器 r4~r11 可以记 作 v1~v8。如果在子程序中使用到了寄存器 v1~v8 中的某些寄存器,子程序进入时必须保建立嵌入式linux开发环境实验
嵌入式实验心得体会
单片机跑马灯实训报告
实验三(ARM编程环境的熟悉及寻址方式实验)
嵌入式开发环境搭建步骤
嵌入式实验报告心得
单片机课程设计报告-跑马灯
实验1(嵌入式开发环境实验)
嵌入式实训报告
单片机实训实验报告
ARM实验报告
嵌入式心得体会
跑马灯实验报告
相关主题
文本预览