高精度轨道调节锁紧机构设计
胡志仁、陈玉龙、金梁斌
(中船重工第七一〇研究所,湖北宜昌 443003)
[摘要]:本文从轨道调节范围、轨道直线度和水平度调节机构以及调节支座的固定三个方面进行了阐述,通过图示、分析和实例说明了两种机构的优劣,并得出了在高精度、高速度和动载荷轨道设计施工中宜采用分离式调节锁紧机构,而不宜采用斜块式调节锁紧机构。
[关键词]:轨道;调节机构;锁紧
[Abstract]:The article is epounded from the range of rail adjustion,the rail straightness ,the adjustable levelness mechanism and the fixation of adjustable bearing.It explains the advantage and disadvantage of two mechanism by diagram,analysis and examples,and gets the detached adjustable lock mechanism used in the high precision,high speed and dynamic lock rail design construction,but not adaptable for adjustable inclined block type lock mechanism.
[Keywords]:track;regulate mechanism;locking
1.前言
轨道是拖曳水池的重要设备,其精度高低是保证拖车高速稳定运行和精确定位的关键因素。轨道的精度一般由加工精度和安装精度决定,前者只要制定合理的加工工艺和选择合适的加工设备,保证加工精度不是难题;后者需要考虑轨道的调节机构和测量基准。目前国内水池一般采用斜块调节锁紧机构,辅以水准槽测量工艺,其轨道精度基本能满足拖曳运行要求,但是在轨道调节范围和精度、轨道锚固锁紧可靠性、轨道抗振性能等几个方面存在一定的问题,影响轨道的精度和稳定性。本文通过分析对比,提出一种适合水池轨道调节锁紧机构—分离式调节锁紧机构,该机构很好的解决了斜块调整锁紧机构出现的问题,实际应用效果良好。
2.两种调节锁紧机构的工作原理
2.1.斜块式调节锁紧机构
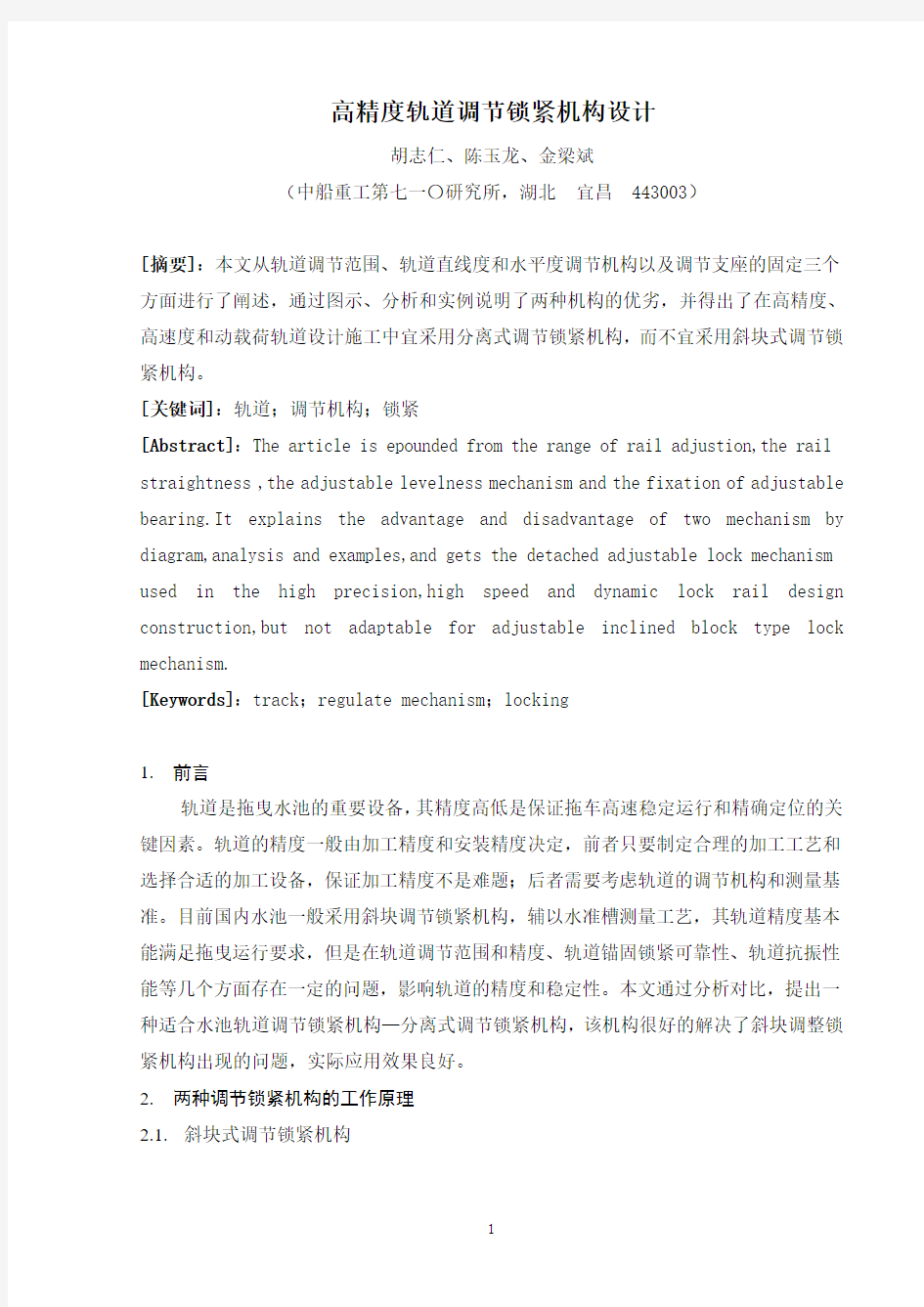
1) 轨道直线度调节通过直线度调节螺栓进行左右调节,由螺栓上的螺母进行紧固放松;
2) 水平度调节主要是通过水平度调节螺栓对斜块进行左右调节,利用斜块错位发生垂直方向位移调节轨道高低,由螺栓上的螺母进行紧固放松。效果图如图1所示。
图1斜块式调节锁紧机构
2.2. 分离式调节锁紧机构
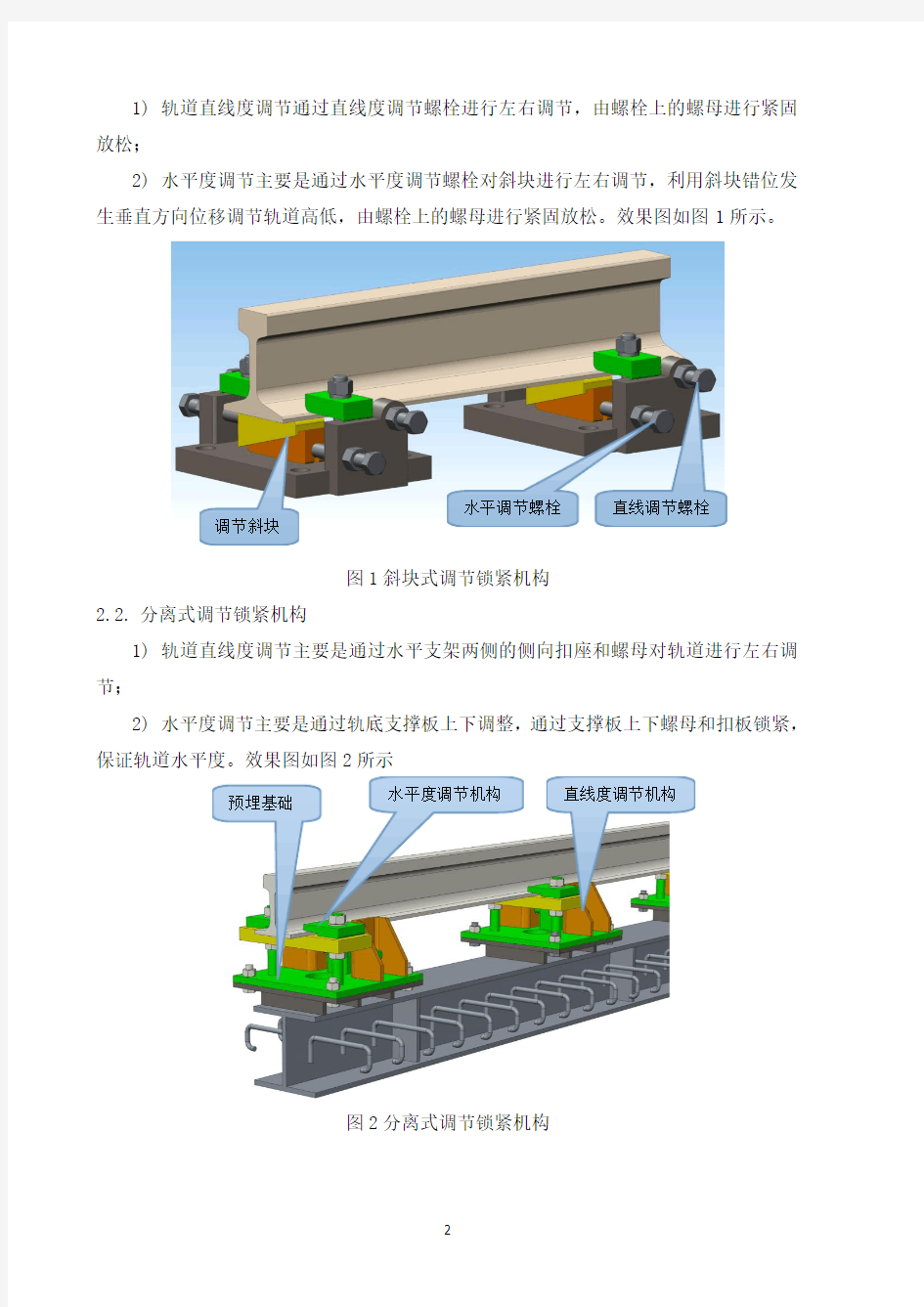
1) 轨道直线度调节主要是通过水平支架两侧的侧向扣座和螺母对轨道进行左右调节;
2) 水平度调节主要是通过轨底支撑板上下调整,通过支撑板上下螺母和扣板锁紧,保证轨道水平度。效果图如图2所示
图2分离式调节锁紧机构
3.调节范围分析
拖曳水池轨道梁为池壁,由于蓄水压力和地基沉降影响,导致轨道在垂向(±20mm 以上)和横向(±10mm以上)产生变形,影响轨道精度,因此要求轨道有较大的调节范围。斜块式调节机构受其斜面角度的限制,垂直调节量一般不超过±5mm,水平调节量不超过±10mm,显然满足不了要求。分离式调节锁紧机构采用螺杆调节,横向调节取决于支撑板腰形孔的长度,一般可达±25mm,垂向调节取决于垂直螺杆头与拖车抱轨器和导向轮的间隙,该间隙主要由轨道的高低决定,一般采用QU75钢轨,垂向调整范围可达±32mm(如图3所示)。
图3 分离式调节锁紧机构垂向调节范围
4.横向调节—轨道直线度调节锁紧机构锁紧力的分析
4.1.螺母锁紧防松要素
众所周知,螺母的锁紧防松作用的好坏主要取决于两个因素:
第一是螺纹的牙型,细牙优于粗牙,越是细牙螺纹,其锁紧防松作用就越好。
第二是锁紧螺母拧紧时,在被锁紧的螺杆上产生的最大拉力在螺杆上相应的长度。很显然,螺杆上产生最大拉力的长度越长,锁紧防松的效果越好。
因此,在机械结构设计中采用螺母防松一般用在受拉螺杆上。对于受压螺杆来说,由于这种压力不产生防松作用,还减弱螺母的拉力,螺杆上产生的压力越大,减弱的程度也越大,因此,对于受压螺杆用螺母防松是不适宜的。
4.2.斜块式调节锁紧机构横向调节受力分析
如图4所示:
图4 斜块式调节锁紧机构受力示意图
1)(a)是螺杆2上不受力时,用螺母1锁紧,在螺杆2上产生拉力的大小和长度;
2)(b)是没有螺母1起作用,仅螺杆2左右调节轨道时产生的压力图;
3)(c)是(a)+(b)的结果,即螺杆2左右调节好轨道后,用螺母1锁紧时,
螺杆2上产生力的叠加图,其受拉的长度已经减短;
4)(d)是轨道受侧向干扰附加在螺杆2上的压力;
5)(e)是(c)+(d)的结果。很显然,螺杆2上受拉力的长度更短了。
6)图4中BC段的实际长度为35mm,若螺母1最大锁紧力为10KN,螺杆2调节
轨道的压力为5KN,拖车对轨道的水平侧向干扰压力为15KN的话(40t重的拖
车产生0.075g的横向动载时,在单个轮子上的侧向压力),螺母1产生的锁紧
力在螺杆2上的影响范围:
a)由长度BC=35mm,缩短为B’C’=35/3=11.7mm,即螺纹由14扣减少为4.7
扣;
b)若侧向干扰力在增加一倍以上,受拉螺杆的长度更短,螺纹仅剩1—2扣,根
本起不到防松效果。
4.3.分离式调节锁紧机构横向调节受力分析
如图5所示,螺杆始终处于受拉状态。
图5 分离式调节锁紧机构受力示意图
1)图5中所示螺母锁紧产生拉力的最大值贯穿在全螺杆上,其螺杆受拉区域为
182mm;
2)(a)是轨道不受外力情况下,用螺母锁紧时,在螺杆上产生拉力的大小和长度;
3)(b)是轨道产生了一倍于螺母锁紧的侧向干扰力,在螺杆上产生拉力的大小和
长度;它的出现不仅没有使螺杆产生压力,反而使拉力增加一倍。这充分说明受拉螺杆采用螺母防松效果最好。
5.垂向调节--轨道水平度调节锁紧机构锁紧力的分析
5.1.斜块式调节锁紧机构垂向调节受力分析
1)详见图4,该机构调节高低的斜形块角度为14°,当钢轨承受垂直向下压力为F(AC)时,在上斜形块上可分解为:
a)斜面正压力F(AB)=F(AC)×Cin14°;
b)沿斜面向下滑力F(BC)=F(AC)×Sin14°;
c)而阻止下滑的摩擦力F m=F(AB)×f,其中f为钢的摩擦系数f=0.15;
d)则沿斜面剩余的下滑力F xh= F(BC)-F m
= F(AC)×Sin14°- F(AC)×Cin14°×f
= F(AC)×(Sin14°- f×Cin14°)
e)高度调节螺杆压力为剩余下滑力F xh在水平面上的投影:
F ss= Cin14°×F xh
= F(AC)×(Sin14°- f×Cin14°)×Cin14°
若取拖车单轮的下压力为150KN,则上斜形块上产生的侧向力(即水平力)
F ss=14.027KN,同理可得下斜块产生的侧向力F sx=F ss=14.027KN。
2)这两个力分别作用在调高低螺栓4左和4右的末端,对螺栓均产生向外压的作用。很显然,这两个力的产生和作用不是加强,而是削弱了锁紧母3的防松作用。
3)另外,钢铁的自锁角为8°31.8′,而该机构设计中把斜角设计成14°,使高低调好后不能自锁,仅是为了满足向下调低的需要及8mm调整高度的需要,而不得不牺牲斜形块的自锁作用,这就是该调节机构的主要缺点。
4)高精度轨道水平度的要求为±0.1mm。这种高低调节机构,调整时可以调整到这一要求。如果不做试验,也就是说没有动态荷载的情况下,或许调好的精度可以保持;而如果经常进行试验,有动态荷载的情况下,会对斜形块产生时有时无、时大时小的水平载荷,压在两侧的调节斜块高低的螺母3的防松效果就会更差,调整的高精度显然难以保持。
5.2.分离式调节锁紧机构垂向调节受力分析
1)详见图5,当轨道承受垂直向下的压力时,直接作用在轨底支撑板下2个承压螺母上,只要螺母的螺纹承压力设计足够,其防松效果更好;
2)只有垂直力,没有分力,轨道不会产生横向滑移;
3)当瞬间车轮载荷过后,轨道会产生向上反弹力(很小),另一方面高速导向轮运行会产生上拔力。此时由垂直螺杆上方的2个扣板和压紧螺母克服。形成螺杆受拉、螺母受压,其防松效果更佳;
4)垂向调节机构无论在什么状态下,都处于螺杆受拉,螺母受压状态,对轨道水平度为±0.1mm的要求能长久保持。
6.调节锁紧机构的锚固分析
6.1.斜块式调节锁紧机构的锚固分析
1)图4中的调节支座上制有4-φ25孔。套在4个M24的地角螺杆上,用螺母压紧力所产生的摩擦力保证,这个力显然是不足的。
2)当轨道产生的侧向干扰力大于螺母压紧力所产生的摩擦力时,调节支座就有可能在1mm(极限状态时)范围内移动。调节支座移动了,轨道的精度就无法保证了,轨道±0.2mm直线度的要求在动态条件下时难以保证。
3)调节机构底座为平面,与混凝土顶面(平整度误差至少在±5mm)很难调整到位,增加安装难度。
6.2.分离式调节锁紧机构的锚固分析
1)此调节锁紧机构主要是通过特型组件I中的垂直螺杆和特性组件II中的水平支架的二次埋设实现。
2)埋设简便,易控制埋设进度,与混凝土顶面平整度误差大小关系不大。
3)高低调整(水平度)主要是调节轨底支撑板,与垂直螺杆埋设误差无关。调整到位后,通过上下螺母锁紧,在动态条件下能长久保持。
4)直线度调整主要是调节水平支架两侧的侧向扣座和螺母,调整到位后,通过两侧螺母锁紧,在动态条件下能长久保持。
7.两种调节锁紧机构性能比较
通过图样,工作原理及受力状态的定性、定量分析,现归纳两种调节锁紧机构性能如下表。
调节锁紧机构性能表
8.结论
通过以上分析,在高精度、高速度、大载荷(动载)轨道设计中宜采用本文中所说的分离式调节锁紧机构,不宜采用斜块式调节锁紧机构。分离式调节锁紧机构主要用于中国航空救生研究所及兵器051基地等超音速运行火箭撬试验场,经过适应性改进,目
前已成功应用于上海交大船模拖曳水池和国家海洋气象试验基地综合试验水池,使用表明,该机构在轨道精度、轨道稳定性、后期维护等方面均优于传统的斜块式调节锁紧机构。
参考文献:
[1] 杨兴邦.《XB高精度火箭撬试验滑轨》[J].中国工程科学,2000,10(2):
99-104;
[2] 徐灏主编.《机械设计手册》第二版第三卷《联接与紧固》.机械工业出版社,
2001,6,ISBN 7-111-02389-7
[3] 郭欣,李广年,劳展杰.《船模水池拖车系统设计分析》[J].船海工程,2013,
42(3)
“铁路轨道”教学大纲 课程编号:30L313Q 适用专业:土木工程课程层次及学位课否:专业主修课程、学位课 学时数:32 学分数:2 执笔者:高亮编写日期:2003年12月 一、课程的任务和教学目标 《铁路轨道》是土木工程专业的专业主修课程及学位课,是从事铁路和城市轨道交通轨道结构设计、施工及轨道管理工作的重要基础课。任务是使学生系统学习铁路轨道的组成、设计原理和方法、轨道管理等相关知识。主要讲授内容有:绪论、轨道结构与部件、几何形位、轨道结构力学分析、道岔、无缝线路等。通过对此课程的学习,可以使学生较好地从事铁路、城市轨道交通设计、施工、管理等方面的工作。 二、课程教学内容和学时分配 (一)绪论(建议3学时) 了解世界铁路的发展概况、我国铁路高速与重载铁路的建设概况、铁路的性质及其在国民经济与交通体系中的地位,及该专业的发展的现状、科研动态等; 重点:使学生系统了解该课程的主要讲授内容及各部分的联系。 (二)铁路轨道结构与几何形位(建议8学时) 了解轨道结构的发展现状、轨道组成及部件(包括钢轨、轨枕、联结零件、道床、道岔、线路防爬及曲线加强设备);理解轨道各种部件的工作特点(材质、构造、类型、伤损等)和功用;掌握轨道几何形位的设置依据、要素及特征等理论和计算方法,并对高速铁路或提速线路的几何参数有一定的了解。 重点:轨道几何行位的要素及特征。 (三)轨道结构力学分析(建议7学时) 了解轨道结构力学分析的目的、意义和轨道结构的受力特点;轨道结构力学分析的几种模型;掌握轨道强度计算理论(主要是连续弹性基础梁理论)。了解轨道横向受力分析的原理;了解轨道准静态、动力学的发展动态。 重点:轨道强度理论(主要是连续弹性基础梁理论); 难点:轨道强度理论。 (四)道岔(建议6学时) 了解道岔的功能、种类;掌握单开道岔的构造特点、各部件的功能及要求等。了解道岔的几何尺寸,理解道岔的允许过岔速度、轨道连接等内容。
1、液压系统回路设计 1.1、 主干回路设计 对于任何液压传动系统来说,调速回路都是它的核心部分。这种回路可以通过事先的调整或在工作过程中通过自动调整来改变元件的运行速度,但它的主要功能却是在传递动力(功率)。 根据伯努力方程: d q C x = (1-1) 式中 q ——主滑阀流量 d C ——阀流量系数 v x ——阀芯流通面积 p ?——阀进出口压差 ρ——流体密度 其中d C 和ρ为常数,只有v x 和p ?为变量。 液压缸活塞杆的速度: q v A = (1-2) 式中A 为活塞杆无杆腔或有杆腔的有效面积 一般情况下,两调平液压缸是完全一样的,即可确定1121A A =和1222A A =所以要保证两缸同步,只需使12q q =,由式(1-2)可知,只要主滑阀流量一定,则活塞杆的速度就能稳定。又由式(1-1)分析可知,如果p ?为一定值,则主滑阀流量q 与阀芯流通面积成正比即:v q x ∞,所以要保证两缸同步,则只需满足以下条件: 11p c ?=,22p c ?=且12v v x x = 此处主滑阀选择三位四通的电液比例方向流量控制阀,如图1-1所示。 图1-1 三位四通的电液比例方向流量控制阀 它是一种按输入的电信号连续地、按比例地对油液的流量或方向进行远距离控制的阀。比例阀一般都具有压力补偿性能,所以它输出的流量可以不受负载变化的
影响。与手动调节的普通液压阀相比,它能提高系统的控制水平。它和电液伺服阀的区别见表1-1。 表1-1 比例阀和电液伺服阀的比较 所以它被广泛应用于要求对液压参数进行连续远距离控制或程序控制,但对控制精度和动态特性要求不太高的液压系统中。 又因为在整个举身或收回过程中,单缸负载变化范围变化比较大(0~50T),而且举身和收回时是匀速运动,所以调平缸的功率为P Fv =,为变功率调平,为达到节能效果,选择变量泵。 综上所可得,主干调速回路选用容积节流调速回路。容积节流调速回路没有溢流损失,效率高,速度稳定性也比单纯容积调速回路好。 为保证p?值一定,可采用负荷传感液压控制,其控制原理图如图1-2所示。它主要利用负荷传感和压力补偿技术,可用单泵(或一组泵)驱动多个执行元件,各执行元件运动速度仅依赖于各节流阀开启度,而与各执行元件的负载压力和其它执行元件的工作状态无关。即使当泵的输出流量达不到实际需要时,各执行元件运动速度的比例关系仍然可以得到保持。此系统的这一特有的独立调速功能大大减少了作业中操纵者协调各执行元件动作所花费的时间,不但显著提高了作业效率,而且有效减轻了操作者的劳动强度。另外,能够以最节省能量的方式实现调速,系统无溢流损失,并以推动执行元件动作所需的最低压力供油。在工作间隙(发动机不停机,各执行元件处于无载状态,不动作),系统自动调节泵的排量到最小值。可以有效降低功率损耗、减小液压系统的温升,所以它是一种性能较好的新型液压系统。
带密封和锁紧装置的垃圾车车厢体后门设计-汽车 带密封和锁紧装置的垃圾车车厢体后门设计 刘同举1耿其东2 1.江苏悦达专用车有限公司江苏盐城 2240512.盐城工学院江苏盐城 224051 摘要:针对传统的垃圾车厢体后门机构存在着锁紧和密封工作不可靠,锁轴和锁钩配合不到位等问题,设计了一种带密封和锁紧装置的新型机构(包括后门和厢体框架两部分)。利用双出杆定位油缸带动顶部的楔形块运动,保证后门旋转中心的位置;利用腰形孔、锁紧油缸、锁钩三平行线结构保证配合可靠,密封条开关牢靠;利用NX三维设计软件,对产品进行设计和验证,以降低手工计算的难度,提高其准确性。通过实验,该装置使用效果良好,易于推广。 关键词:垃圾车厢体后门密封锁紧装置 NX分析 中图分类号:U469.6+5.03 文献标识码:A文章编号:1004-0226(2015)10-0102-04 第一作者:刘同举,男,1981年生,工程师,现从事环卫车辆等设计工作。 1 前言 垃圾车用于收集、装载和运输生活垃圾,并可将装入的垃圾压碎、压缩,使其密度增大,体积缩小,由此极大地提高了垃圾收集和运输的效率。运输过程中需保持后门关闭,防止垃圾泄漏,在车辆到达垃圾处理场后,将后门打开,使垃圾卸下。因此,后门既要能够打开足够角度,又要保证关闭时的密封
性。 2现有的后门机构 现有的后门设计通常包括手动方式和自动方式两种,自动方式中大多采用开门油缸、导向孔、锁钩等,锁紧装置多是对锁钩处的改进,对后门下滑的问题没有解决。 2.1手动方式 较为成熟的手动后门锁紧机构为棘轮机构,广泛运用于移动垃圾箱后门锁紧,如图1所示。转动棘轮机构,正反向螺纹杆将锁钩与车厢之间的联接拉杆伸长,使锁钩顺时针旋转,后门按导向条孔向下滑行,锁钩与锁轴松开,倾翻车厢,后门将自动打开。该方式可将污水完全密封在车厢内,密封效果好,但操作麻烦。 另一种手动方式为门闩式,其操作不便、密封性差,已逐步被市场淘汰。 2.2自动方式 自动后门锁紧机构因车型不同,其外观也不大一样,但其原理是大致相同的。以后装压缩式垃圾车为例(如图2),开门油缸伸出将后门(填塞器)先按导向条孔向上滑行,使锁钩与锁轴脱开,开门油缸继续伸出,后门将随之打开。
城市轨道交通供电系统课程设计 专业:电气工程及其自动化 班级:电气091 姓名: 学号: 指导教师: 2012 年 7月 20日
1 设计原始资料 1.1具体题目 2、某地铁车辆段动力设备负荷表如表2所示。试计算该车辆段的配电变压器容量。 表2 某车辆段计算负荷分布表 额定功率 需要系数功率因数 负荷类型序号负荷种类 (kW) 1 通信设备45 0.80 0.85 2 信号设备80 0.80 0.85 一 3 消防用电设备25 0.60 0.80 二 4 防灾用电设备35 0.60 0.80 级 5 通风设备65 0.70 0.90 负 6 检修动力125 0.85 0.85 荷7 各车间照明负荷105 0.70 0.80 8 应急照明55 1.00 0.80 9 车辆设备单体设备195 0.80 0.85 三10 通风空调设备155 0.60 0.90 级11 检修动力120 0.70 0.80 负12 电热设备75 0.60 0.70 荷13 各检修库照明负荷80 0.80 0.85 1.2 要完成的内容 配电变压器容量是指注入国家电网的功率总和,即主要反映在城市轨道供电系统的系统主变压器的容量选取上。变压器的容量是在负荷统计的基础上选定的,由于负荷预计不容易做准,—般按预计的最大负荷选择。 本设计主要完成车辆段配电变压器容量的计算,包括电流、无功功率、有功功率、视在功率以及总负荷的计算功率等。
2 设计内容 2.1 设计规程 配电变压器的容量需要在动力照明低压负荷齐全的基础上进行计算。在城市轨道交通车站、车辆段或控制中心,动力照明设备种类繁多,基本上不存在各机电设备同时工作的可能,而且各单种机电设备的多台设备也不会同时工作。因此,配电变压器容量不能简单地将各低压负荷容量进行叠加求得,而是应充分考虑城市轨道交通车站、车辆段或控制中心内各动力照明设备的运行特点,在考虑多台设备需要系数的基础上,对各低压负荷在不同运行方式下取同时系数后求得。 2.2 设计方案 对于配电变压器的容量,应充分考虑用电负荷的设备构成与运行工况,优化计算统计方法,合理进行选择,以达到投资合理、运行效率高、电能损耗小、运行费用低的目的。 3 容量计算 3.1 计算内容 配电变压器的容量计算需要计算以下内容: (1) 各低压负荷的计算电流、计算功率、无功功率,总负荷的计算功率、无功功率、视在功率。 (2) 补偿前的总功率因数、需要补偿的无功功率容量、补偿后的视在功率。 (3) 正常情况下两台配电变压器分列运行承担全部低压负荷时,每台配电变压器的负载率。 (4) 非正常情况下一台配电变压器承担全部一、二级低压负荷时,单台配电变压的负载率 3.2 负荷计算 3.2.1单组用电设备计算负荷的计算公式 a) 有功计算负荷(单位为kW ) N di P K P ci (1)
换向阀在锁紧回路的合理使用 换向阀在液压系统中是一种控制调节元件。其主要功用是改变油流方向进而控制执行元件的运动方向。在液压系统设计和使用过程中,有时会因为换向阀选择不当, 使得液压系统在运行时,某些工作性能受到影响,甚至出现问题。本文列举几个换向阀在液压系统应用的实例,分析了使用不当的原因,给出了正确的使用方法。 1 换向阀在锁紧回路的合理使用 锁紧回路锁紧回路的功用是使执行元件 在任意位置上停留,并且停留后不会因为外力作用而移动位置。图1所示为使用液控单向阀的锁紧回路(双向液压锁)。液控单向阀阀心一般是锥阀式结构,内泄很少,锁紧精度只取决于执行元件的泄漏,锁紧精度比较高。为了保证液压锁的锁紧性能,在回路中应该选择H型或者Y型机能的换向阀。当执行元件处于预定停留位置时,换向阀中位,液控单向阀控制油口经过换向阀中位直接和油箱相通,控制压力充分卸荷,液控单向阀反方向截止,液压缸因两腔油液被封闭而锁紧。现场有换向阀中位机能选择不当的情况,笔者曾经接触某电厂翻滚车机,其液压系统中锁紧回路换向阀的机能是M型的,有时锁紧效果不好,经过更换Y型机能换向阀后,锁紧性能大为改善。研究其原因,是原系统换向阀的中位机能选择不当, M型机能的换向阀在中位时,液控单向阀控制油口的油压不能尽快消失,液压锁不能立即关闭,所以锁紧效果不好。 2 换向阀在夹紧油路的合理使用 在一些数控车床和半自动车床上,广泛应用着由液压传动装置控制工件夹紧与松开的液压卡盘。液压卡盘一般由液压系统中减压回路(夹紧油路)控制,通过卡盘机械装置实施对工件的夹紧与松开。因此,关于夹紧油路的设计除应考虑提供稳定的、满足需求的夹紧力外,一个十分重要的问题是保证工件夹紧的安全可靠。 图2所示,为某半自动车床液压系统中的夹紧油路,夹紧油路中减压阀的作用是调整所需要的夹紧力,满足液压卡盘夹紧需求;单向阀阻止液体反向流动,起到短时保压作用,同时由于
轨道交通课程设计报告 指导老师:江苏大学武晓辉老师 一、项目背景及镇江市轨道交通建设必要性 镇江市位于北纬31°37′~32°19′,东经118°58′~119°58′,地处长江三角洲地区的东端,江苏省的西南部,北临长江,与扬州市、泰州市隔江相望;东、南与常州市相接;西邻南京市。镇江市域总面积3847平方公里,总体规划定位城市性质为国家历史文化名城,长江三角洲重要的港口、风景旅游城市和区域中心城市之一。 2005年,镇江城市总体规划进入实施阶段,城市空间布局将极大突破现有形态,“扩充两翼、向南延伸”成为城市新的发展方向。伴随城市化进程加快、镇江跨入特大城市行列,城市空间的拓展对城市交通体系提出了新的要求。镇江市为江苏省辖地级市,现辖京口、润州、丹徒三区,代管句容、丹阳、扬中三市。另有国家级经济技术开发区-镇江新区行使市辖区经济、社会管理权限。镇江全市总面积3848平方公里,人口311万人,市区户籍人口103.3万人市,市区常住人口122.37万人,人民政府驻润州区南徐大道68号。 内部城市空间结构调整:2005年,镇江城市总体规划进入实施阶段,城市空间布局将极大突破现有形态,“扩充两翼、向南延伸”成
为城市新的发展方向。伴随城市化进程加快、镇江跨入特大城市行列,城市空间的拓展对城市交通体系提出了新的要求,建设轨道交通是未来城市规划的必然结果。 城市化发展水平规划: 近期(2000-2010):城市化水平达到:55% 城镇人口162万 中期(2010-2020):城市化水平达到:60% 城镇人口184万 远期(2020-2050):城市化水平达到:70% 城镇人口231万城市等级规模规划: 中期:形成1个大城市,1个中等城市,2个小城市和38个小城镇的等级结构。 远期:形成1个特大城市,2个中等城市,1个小城市和27个小城镇的等级结构。 镇江位于南京都市圈核心层,是一座新兴工业城。镇江拥有2个国家级开发区、6个省级开发区、5个国家级高新技术产业基地,镇江市的经济发展水平居江苏省中等偏上水平。2013年实现国内生产总值2927.09亿元,完成公共财政预算收入245.52亿元,城镇居民人均可支配收入32977元,农民人均纯收入16258元,增长18.1%,;人均GDP73947元,居江苏省第5名。“三次产业”分别实现增加值129.06亿元、1549.4亿元、1248.63亿元,同比分别增长3.1%、12.5%和12.3%。
轴向锁紧装置设计报告
1、设计概述 轴向锁紧装置在光、电缆生产设备及其他多种行业的生产设备中广泛应用。 传统的轴向锁紧装置以螺母锁紧装置、紧定螺钉套锁紧装置和销套锁紧装置最为常见: 1、螺母锁紧装置:轴端螺纹往往设计得比较长,而螺距又比较小,已造成装拆效率低或造成裸露过长而强度不高的细螺纹的局部损伤。 2、紧定螺钉套锁紧装置:为了确保锁紧的可靠性,只有增加螺钉的旋紧力,这样,既增加了拆卸难度,又增加了轴面损伤、螺钉及套螺孔螺纹损坏的可能。 3、销套锁紧装置:靠套内弹性定位锁销入轴上锁孔而定位的轴向锁紧装置;特点是可靠性高,但轴向调整连续性差。 综上所述,传统的轴向锁紧装置不太适于频繁拆装或轴向调整,且有的锁紧可靠性不高。为此我们要探究制造一种适于频繁拆装或轴向调整,且锁紧可靠性颇高的轴向锁紧装置,更好地服务应用于各行各业中的生产设备。 2、设计思路和方案 力学中有一类现象称为“自锁现象”,当自锁条件满足时,外力越大,物体保持静止的能力越强.人们利用自锁现象的力学原理开发出了各种各样的机械工具,这些工具广泛应用于工农业生产中;在日常生活中利用这一原理的现象也随处可见。 依此现象我们设计了一种光杆轴向快速锁紧装置,它的核心部件是内锥形套,其内锥面斜度角的合理选择是该装置可靠性(即反向自锁性)的首要保障,图1为内锥形套结构图。 当轴向外力作用在该装置外套及内锥形套外端面时,内锥形套通过锥面与淬火钢珠接触点作用的法向力使钢珠产生沿轴滚动及滑动的趋势。为了实现该装置的反向自锁,内锥形套锥面斜度角必须满足以下两个条件: (1)淬火钢珠相对轴滚动自锁; (2)淬火钢珠相对轴滑动自锁。 下面以淬火钢珠为研究对象,分别就这两方面进行受力分析。 图二淬火钢珠的临界自锁状态受力图。 图中:N——轴对淬火钢珠的法向反作用力; P——外力导致内锥形套通过B点作用于淬火钢珠的法向力; Ta——轴面作用于淬火钢珠的最大静摩擦力; Tb ——内锥形套作用于淬火钢珠的最大静摩擦力; f1——轴面与淬火钢珠间的静摩擦系数; f2——内锥形套锥面与淬火钢珠问的静摩擦系数; R——淬火钢珠的半径。
总 专业班级
18 页
第
1 页
编号:
机制 0901 班
设计方案报告
学生姓名
产品名称
轴向锁紧装置
生产纲领
件/年
零件名称
生产批量
件/月
1、设计概述 为克服传统锁紧装置操作复杂,可靠性差等缺点,该装置结构简单,便捷,降低操作强度低,提高劳动效率。 本产品利用双偏心轮相对轴的快速压紧,在光轴上加紧零件欲轴向移动时,通过卡紧光轴,实现轴向锁紧,轴向锁紧 的可靠度取决于偏心轮对光轴的压紧力。本装置的一大亮点为沿轴向锁紧物件时,在轴上任意位置反向拉动外套均不能产 生反向移动,内外套筒利用螺纹自锁功能对轴向运动时产生的力传递给凸轮,实现凸轮的反向运动来压紧轴,在拆卸装置 时,利用螺纹微调功能,内套筒轴向移动,轴端顶开凸轮,自锁消除。该方案制作简单,操作方便,便于拆卸。 设计过程中,我们也考虑了传统的轴向锁紧方案。螺母锁紧,利用螺纹自锁原理,实现轴向锁紧。但由于被加持零件 厚度不定,轴端螺纹设计较长,螺距较小,夹持厚度较小的材料时会造成装拆效率的降低,而且容易造成裸露过长而强度 不高的细螺纹的局部扭伤。紧定螺钉套锁紧装置,在轴套与轴间旋入紧定螺钉,进行轴向锁紧,锁紧的可靠性取决于螺钉 的旋紧力,但这样会增加了拆装难度,又增加了轴面损伤螺钉及套螺孔螺纹损伤的可能。 综合以上三种方案,我们选择安全可靠的偏心轮轴向快速锁紧装置。
2、设计思路和方案 本产品使用方法如下:轴向锁紧物件时,在光轴轴向移动时,将该装置直接套在轴上,直至压紧物件为止。压紧过程 中,在轴上任意位置反向拉动外套均不能产生反向移动,拆卸时,左手握住外套筒,右手旋转内套筒法兰,利用螺纹微调 功能,内套筒轴向移动,轴端顶开凸轮,自锁解除,可实现装置反向移动。 基于圆偏心结构简单,容易制造,应用广泛,我们采用圆偏心轮。 圆偏心的特性 下图为偏心轮直径 D,偏心距 e。 偏心夹紧圆周上各接触点的升角а 不是一个常数。 由下图知,从任意接触点 P 分别作与回转中心 O,O1 的连线, ? OPO 1 就是 P 点的升角 ? P
? P ? arctan
OM MP ? arctan es in ? D 2 ? e cos ?
式中 Θ ——偏心轮回转角,即 mn 与 O1P 的夹角。 随着回转角的增大,升角也随之增大,Θ =90 度时升角最大,此时 OO1 连线处于水平位置。
? max ? arctan
2e D
回转角大于 90 度以后,升角随回转角的增大而减小,Θ =180 度时,升角为 0 度。圆偏心轮升角变化的特性与自锁条 件,工件段选择及结构设计等关系重大。
2、圆偏心轮的自锁条件
? max ? ? 1 ? ? 2
轨道工程课程设计 直线尖轨直线辙叉 60kg钢轨12号单开道岔平面布置设计 班级: 姓名:
学号: 指导老师: 完成时间: 第一部分 设计任务与要求 1. 确定转辙器主要尺寸 2. 确定辙叉和护轨几何尺寸 3. 选择导曲线半径 4. 计算道岔主要几何尺寸 5. 导曲线支距计算 6. 配轨计算 7. 配置岔枕 8. 绘制道岔总平面布置图 第二部分 设计资料 一、轨道条件 钢轨60kg/m ,标准长度12.5m ,区间线路轨枕根数:1760根/公里,道岔类型:钢筋混凝土Ⅱ。 二、道岔型式 (1)转辙器 直线尖轨,跟端支距mm y 1440 ,跟端结构为间隔铁夹板连接, 夹板l =820mm
(2)辙叉及护轨 直线辙叉,N =12,辙叉角'''49454o =α,辙叉趾距mm n 2127=,辙叉跟距 mm m 3800=。 (3)导曲线 圆曲线形,不设超高。 三、物理参数: 动能损失允许值:220/65.0h km =ω 未被平衡的离心加速度容许值20/65.0s m =α 未被平衡的离心加速度时变率容许值30/5.0s m =ψ 四、过岔速度 侧向过岔速度要求:h km V s /45= 五、道岔中的轨缝值 尖轨跟端及辙叉趾端轨缝为6mm ,其余为8mm 。 第三部分 提交资料 1.计算说明书; 2.图纸; 3.如果计算说明书和图纸有电子版,需提交一份电子版。 第四部分 设计计算 一、确定转辙器的几何尺寸 1、计算尖轨长度
尖轨转折角''66.35'114565.0arcsin arcsin 0?==???? ??=s V ωβ 根据设计资料:跟端支距:mm y 1440= 则尖轨长度为:()mm y l 46.8037' '66.35'11sin 144 sin 00=?== β 根据尖轨长度的取值原则,采用接近于计算长度的整数长度,所以取 mm l 80500= 则对应的尖轨转折角''9.29'118050144 arcsin ?=?? ? ??=β 2、计算基本轨尖端前部长度 由设计资料可知mm q 2646= 3、计算基本轨后端长度'q 整个基本轨取为一个标准轨长即L=12.5m ,则: ()mm l q L q 29.1805''9.29'11cos 8050264612500cos 0'=??--=--=β 二、确定辙叉及护轨的几何尺寸 1、确定趾距n P 和跟距m P 根据设计资料知辙叉角''49'454?=α 前端长度n =2127mm 所以:趾距mm n P n 79.1762''49'454sin 212722sin 2=???=?? ? ??=α 后端长度m =3800mm 跟距mm m P m 84.3152sin 2=?? ? ??=α 2、计算护轨工作边延展长度 护轨工作边延展长度示意图如图1所示。
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号 (45)授权公告日 (21)申请号 201920329600.0 (22)申请日 2019.03.15 (73)专利权人 江苏阿李动力科技有限公司 地址 213300 江苏省常州市溧阳市中关村 科技产业园吴潭渡路6号 (72)发明人 余家康 余恺 王理 刘金阳 (74)专利代理机构 常州兴瑞专利代理事务所 (普通合伙) 32308 代理人 谈敏 (51)Int.Cl. B23Q 3/06(2006.01) (54)实用新型名称 快速锁紧机构 (57)摘要 本实用新型公开了一种快速锁紧机构,它用 于快速连接工装夹具和设备,它包括活动座、固 定座、卡紧机构和周向定位机构,所述活动座用 于连接工装夹具,所述活动座设置有锁紧轴,所 述锁紧轴上设有卡槽;所述固定座连接在设备 上,所述固定座上设置有用于与所述锁紧轴配合 的锁紧孔;所述卡紧机构包括锁紧卡片和卡片移 动机构,所述锁紧卡片沿锁紧孔的径向滑配在固 定座上,需要固定活动座时,所述卡片移动机构 使锁紧卡片卡入卡槽中以固定活动座的轴向位 置;所述周向定位机构设置在固定座和活动座之 间,并用于固定活动座相对于固定座的周向位 置。本实用新型用于快速更换、固定工装夹具,操 作简单,不仅保证了加工精度,还有利于提高生 产效率和降低成本。权利要求书1页 说明书4页 附图1页CN 209578891 U 2019.11.05 C N 209578891 U
权 利 要 求 书1/1页CN 209578891 U 1.一种快速锁紧机构,它用于快速连接工装夹具和设备,其特征在于:它包括活动座(1)、固定座、卡紧机构和周向定位机构,其中, 所述活动座(1)用于连接所述工装夹具,所述活动座(1)设置有锁紧轴(11),所述锁紧轴(11)上设有周向设置的卡槽(12); 所述固定座连接在设备上,所述固定座上设置有用于与所述锁紧轴(11)配合的锁紧孔; 所述卡紧机构包括锁紧卡片(2)和卡片移动机构,所述锁紧卡片(2)沿锁紧孔的径向滑配在所述固定座上,所述卡片移动机构设置在固定座上;当所述锁紧轴(11)插入所述锁紧孔内时,动作所述卡片移动机构使所述锁紧卡片(2)卡入卡槽(12)以固定所述活动座(1)相对于所述固定座的轴向位置和动作所述卡片移动机构使所述锁紧卡片(2)退出所述卡槽(12)以便所述活动座(1)的锁紧轴(11)拔出所述锁紧孔; 所述周向定位机构设置在固定座和活动座(1)之间,并用于固定所述活动座(1)相对于固定座的周向位置。 2.根据权利要求1所述的快速锁紧机构,其特征在于:所述锁紧卡片(2)具有锁紧工位和松开工位,所述锁紧卡片(2)设置有卡片孔(21),锁紧卡片(2)位于松开工位时,锁紧轴(11)可穿过所述卡片孔(21);锁紧卡片(2)位于锁紧工位时,卡片孔(21)的内壁卡入所述卡槽(12)。 3.根据权利要求2所述的快速锁紧机构,其特征在于:所述卡片移动机构包括弹性件(3)和推杆(4),所述固定座上设置有弹性件槽、卡片槽和推杆槽(8),所述卡片槽的一端部与所述弹性件槽连通,所述卡片槽的另一端部与所述推杆槽(8)连通,所述弹性件(3)设置在弹性件槽内,所述锁紧卡片(2)滑配在所述卡片槽中,所述推杆(4)滑配在推杆槽(8)中,所述弹性件(3)的一端部和所述推杆(4)的一端部分别抵接在所述锁紧卡片(2)相对的两侧端,所述弹性件(3)的另一端部与弹性件槽的侧壁相抵,所述推杆(4)的另一端部露出所述固定座,推动推杆(4),使锁紧卡片(2)压缩弹性件(3)移动至松开工位,松开推杆(4),弹性件(3)将锁紧卡片(2)推回卡紧工位。 4.根据权利要求3所述的快速锁紧机构,其特征在于:所述固定座包括底座(51)和顶盖(52),所述底座(51)和顶盖(52)相抵并固定连接在一起,所述弹性件槽、卡片槽和推杆槽(8)均设置在所述底座(51)的与所述顶盖(52)相抵的端部或设置在所述顶盖(52)的与所述底座(51)相抵的端部,所述锁紧孔包括设置在顶盖(52)上的第一锁紧孔(61)和设置在底座(51)上的第二锁紧孔(62),所述锁紧轴(11)穿过第一锁紧孔(61)到达第二锁紧孔(62)。 5.根据权利要求1所述的快速锁紧机构,其特征在于:所述周向定位机构包括定位销(71)和定位孔(72),所述定位销(71)设置在所述固定座和所述活动座(1)中的任意一个上,所述定位孔(72)设置在所述固定座和所述活动座(1)中的剩余一个上,所述定位销(71)与所述定位孔(72)配合,以固定所述活动座(1)相对于固定座的周向位置。 6.根据权利要求1所述的快速锁紧机构,其特征在于:所述锁紧轴(11)的端部设置有用于引导所述锁紧轴(11)插入锁紧孔的锥面(13)。 2
22
22 Ta ——轴面作用于淬火钢珠的最大静摩擦力; Tb ——内锥形套作用于淬火钢珠的最大静摩擦力; f1—— 轴面与淬火钢珠间的静摩擦系数; f2—— 内锥形套锥面与淬火钢珠问的静摩擦系数; R —— 淬火钢珠的半径。 淬火钢珠相对轴临界滚动自锁状态时,必有: 0=∑A M () ''cos 1sin φφ+??-??=∑ R T R P M B A 故: 0)cos 1(sin ' '=+??-??φφR T R P B 图1内锥套结构图 将P f T B ?=2代入上式,整理得: 2 '2f tg =??? ??φ 整理上式,可得滚动自锁角为: 2'2arctgf =φ 可知,淬火钢珠相对轴滚动自锁条件为: 'φφ≤ 即 22arctgf ≤φ 又有0=∑x F A B x T T P F -?-?=∑' 'cos sin φφ 所以()10cos sin ''---=-?-?A B T T P φφ 因为() ()() 4sin cos 32''21---?+?=-----------?=-----------?=φφB B A T P N P f T N f T 将式(2)、(3),(4)代人式(1),整理可得()()0cos sin 1'21'21=?+-??-φφf f f f 图2淬火钢珠的临界自锁状态受力图 则由以上可知,淬火钢珠相对轴滑动自锁条件为:'φφ≤ 即()()[]2121'1/f f f f arctg ?-+≤φ
22 综合上述受力分析的结果,可得反向自锁式轴向锁紧装置实现反向自锁的条件为: {()()[]}()51/,2m in 21212----?-+≤f f f f arctg arctgf φ 材料45钢 查得:15.015.021==f f ,得 06.17≤φ故 15=φ (实际应中,为保证装置反向自锁的可靠性及结构的紧凑性,φ值的选择应比式(5)所求得的值小2~3°为宜。) 有一点需说明,上述受力分析过程中,不需要考虑弹簧反力对钢珠的作用,其值亦与自锁角大小无关。 3、设计结果 1)外套与内锥形套间,内套与拉帽间均为过盈配合、压力装配; 2)外套与内锥形套端面比内套端面略微突出; 3)内套孔径D2比锁紧轴直径略大,均布钢珠(3—4颗)的最小公共内切圆直径D1 比锁紧轴直径略小; 4) 4)内锥形套圆柱面内孔直径比均布钢珠的最小公共外切圆直径略小,并与其内套配合面呈间隙配合; 5)圆柱螺旋压缩弹簧保证淬火钢珠与内锥形套内锥面有效接触,且操作灵活。 图三光轴快速锁紧装置三维剖分图 1-拉帽;2-内套;3-外套;4-内锥形套;5-钢珠;6-弹簧
陕西铁路工程职业技术学院2015~2016学年第二学期 《轨道工程》课程设计 专业土木工程 班级土木(本)2151 姓名赵子程 学号 07 指导老师程建红 2016年 5 月 30 日
陕西铁路工程职业技术学院 2015 —2016 学年第二学期 注:综合成绩评定中,平时表现成绩占30%,实训成绩占70%。
目录 一.任务书 (1) 二.指导书 (10) 三.有关资料 (12) 1.轨温 (12) 2.轨道特征 (12) 3.线路等级及最小曲线半径 (12) 4.行驶机车 (12) 四.设计步骤和方法 (13) 1.强度计算 (13) 2.稳定压力计算 (16) 3.锁定轨温计算 (18) 4.伸缩区长度与防爬设备的布置 (19) 5.缓冲区预留轨缝计算 (20) 6.压力峰检算 (21) 五.轨枕弯矩的检算 (21) 六.路基基床表面应力检算 (23) 七.防爬设备的布置 (23) 八.位移观测桩布置原则 (23) 九.参考书籍 (24)
十.实训总结报告 (25)
陕西铁路工程职业技术学院2015 ~ 2016 学年第二学期 课程实训 任 务 书 系别:铁道工程系 专业:土木工程 班级:土木(本)2151 指导老师:程建红 教研室意见:教研室主任(签字):2016年 5月 30 日 2015~2016学年第二学期
《轨道工程》课程设计任务书 一、课程设计性质、任务与目的 《轨道工程课程设计》是土木工程专业的一门实践性课程;本课程设计主要训练学生综合运用所学基础知识的能力,培养学生用定性分析方法对问题进行综合分析和评价。本课程设计是在学过《轨道工程》的基础知识后,对“轨道强度计算”?、“无缝线路轨道设计”?、“轨道结构组成”等知识的拓宽与综合应用。通过作业,使学生在巩固所学轨道结构组成、轨道强度计算的基本方法,熟悉并运用课堂所学内容,从而加深对所学内容的理解,提高综合分析和解决问题的能力。? 熟练掌握普通无缝线路设计步骤,了解无缝线路的特点及受力特征。通过对普通无缝线路的设计,达到对整个轨道体系的全面的认识。? 二、设计要求? 1.独立完成,有独特见解。? 2.文字清晰,条理清楚,步骤完整。? 3.文面、图面整洁,装订整齐。? 三、设计资料? 1.轨温:? (1)兰州地区;(2)石家庄地区;(3)西宁地区;(4)西安地区(5)合肥地区;(6)郑州地区;(7)长沙地区。按自己学号先后顺序选取相应地区的轨温。? 相应的轨温在教材中P145页查找。 2.轨道条件? (1)钢轨:为60kg/m的钢轨、按预期垂磨6mm计算;缓冲区钢轨采用每根长25m的标准轨;轨钢容许应力:[σs]=36500×104pa;? (2)轨枕:混凝土Ⅱ型轨枕,每公里铺设1840根,?a=544mm;? (3)扣件:接头扣件为ф24mm、级螺栓,六孔夹板;中间扣件为弹条Ⅱ型
钢轨桩设计参数及工程量表 表8 桩头锚杆工程量表 C.钢筋混泥土联系梁 考虑桩头与锚杆的 连接及抗滑桩的整体,250m 、220m 、水平设置 钢筋混泥土连续梁,参数为截面0.5×0.5m 2,总 长度92.0m ,C30混泥土量28.0m3。 设计 治理工程量及主要材料 表12 边坡加固总工程量一览表
注:本表工程量为主要工程量,预算时依相应定额标准,还应包括各种措施及辅助工作的工程量。 设计施工说明 本节主要就设计中所考虑因素以及对施工的要求作一说明,具体施工步骤及安排应由施工单位组织编写施工组织设计,本说明按单项工程及施工顺序要求如下: (1)成孔 ①成孔规格有2种:?130㎜、?150㎜、其中锚杆孔?130 ㎜,锚索孔为?150㎜。 ②造孔时,不得采取湿式钻进,以免水对边坡稳定造成不 利影响,应采用风动潜孔锤冲击回转钻进法造孔。 ③严格控制钻孔倾角a=15°(向下倾),钻孔开孔角度误 差不超过20°。 ④成孔后应吹孔清渣,孔底沉渣不得大于20㎝,保证钻 孔深度达到设计要求。 ⑤其它未尽操作事项,严格执行相应锚固工程国家规范。(2)杆体的制作与安放
①主要杆材有两种:φ25螺纹钢,用作锚杆杆材;?j15(7 ?5)钢绞线,用于锚索的杆材。 ②锚索体中间为镀锌钢管(1时、1?时两种,锚杆杆体除 外)作为外围6根(8)钢绞线的支撑架(见相应结构图),同时又作为二次高压补充注浆的注浆管。钢管上焊有隔离架和导向架,锚索体锚固段的镀锌钢管上应间隔50㎝预留?80㎜小孔,以利于二次补浆浆体的扩散,充填和密实锚固段。 ③杆体自山段的钢绞线(6束、8束)应图上钙基黄油后, 用于?18㎜的聚乙烯所塑料管套种住,并用铁丝绑扎住,段头用于包装胶带密封,从而达到既防腐,同时又利于设计锚固张拉的专递。 ④沿杆体轴线方向,每隔3.0m设置一隔离架和导正保持 架,以保证注浆浆体充填密实且充分握裹和保护钢绞线,锚体保护层厚不小于20㎜。 ⑤锚体各钢绞线必须平顺且不交叠,以防止张拉时受力不 均匀,应力过分集中而将钢绞线拉断。 ⑥锚杆(索)下料时应留有一定余地,孔口预留暂定1.5m (施工时,根据张拉设备型号可调整),下料过短将会造成无法张拉锁定。 ⑦一次注浆管随锚体一同放入钻孔,注浆管头部距孔底 100mm,以防止注浆管头被堵塞。锚体应充分安装到位,
你好,液压锁紧回路总共有四种: 第一,用换向阀锁紧的回路。因受换向阀内泄漏的影响,采用换向阀锁紧,锁紧精度较低。如图1 第二,用单向阀锁紧的回路。当液压泵停止工作时,液压缸活塞向右方向的运动被单向阀锁紧,向左方向则可以运动。只有当活塞向左运动到极限位置时,才能实现双向锁紧。这种回路的锁紧精度也受换向阀内泄漏量的影响。如图2 第三,用液控单向阀锁紧的回路。当换向阀处于中位时,使液控单向阀进油及控制油口与油箱相通,液控单向阀迅速封闭,液压缸活塞向左方向的运动被液控单向阀锁紧,向右方向则可以运动,仅能实现单向锁紧。如图3 第四种,双液控单向阀(液压锁)锁紧回路。在工程机械液压系统中常用此类锁紧回路。当三位四通电磁换向阀处于中位时,两个液控单向阀进油及控制油口都与油箱相通,使两个液控单向阀迅速关闭,可实现对液压缸的双向锁紧。如图4 液压锁实质是由两个液控单向阀组成。液压锁公司介绍,液压锁是用于防止液压缸或马达在重物作用下自行下滑,需要动作时,须向另一路供油,通过内部控制油路打开单向阀使油路接通,液压缸或马达才能动作。 液压锁公司介绍,由于该产品结构本身的原因,液压缸运动过程中,由于负载的自重,往往在主工作腔造成瞬间失压,产生真空,而使单向阀关闭,然后继续供油,使得工作腔压力上升再开启单向阀。由于频繁地发生打开关闭动作,而会使负载在下落的过程中产生较大的冲击和振动,因此,双向液压锁通常不推荐用于高速重载工况,而常用于支撑时间较长,运动速度不高的闭锁回路。在液压系统中.以液压缸作为执行器时.经常需要使液压缸在任意位置停留并承受一定的负载力,工作中常用液压锁来锁紧回路.目前,国内普遍采用普通双向液压锁、内泄压式液压锁等,它们都能使工作部件在任意位置停留;另外.还有一类型液压锁,即端位固定液压锁,它包括液控端位机械锁和弹性卡端位液压锁。 以上就是关于液压锁的原理的介绍,希望阅读后对您有帮助,如果您还有其它问题想要咨询可以联系我们。
专业班级机制本11-04 设计方案报告总 5 页第页编号: 产品名称 光轴快速锁 紧装置 生产纲领件/年 学生姓名程彦娜、丰利、杨振玲、曾春艳、祁鹏 飞、沈建成零件名称生产批量件/月 1、设计概述 轴向锁紧装置在光、电缆生产设备及其他多种行业的生产设备中广泛应用。 传统的轴向锁紧装置以螺母锁紧装置、紧定螺钉套锁紧装置和销套锁紧装置最为常见: 螺母锁紧装置:轴端螺纹往往设计得比较长,而螺距又比较小,已造成装拆效率低或造成裸露过 长而强度不高的细螺纹的局部损伤。 。紧定螺钉套锁紧装置:为了确保锁紧的可靠性,只有增加螺钉的旋紧力,这样,既增 加了拆卸难度,又增加了轴面损伤、螺钉及套螺孔螺纹损坏的可能。 销套锁紧装置:靠套内弹性定位锁销入轴上锁孔而定位的轴向锁紧装置;特点是可靠性高,但轴向 调整连续性差。 综上所述,传统的轴向锁紧装置不太适于频繁拆装或轴向调整,且有的锁紧可靠性不高。 为此我们要探究制造一种适于频繁拆装或轴向调整,且锁紧可靠性颇高的轴向锁紧装置,更好地服务应用于各行各业中的生产设备。
2、设计思路和方案 力学中有一类现象称为“自锁现象”,当自锁条件满足时,外力越大,物体保持静止的能力越强.人们利用自锁现象的力学原理开发出了各种各样的机械工具,这些工具广泛应用于工农业生产中;在日常生活中利用这一原理的现象也随处可见。 依此现象我们设计了一种光杆轴向快速锁紧装置,它的核心部件是内锥形套,其内锥面斜度角的合理选择是该装置可靠性(即反向自锁性)的首要保障,下图为内锥形套结构图。 当轴向外力作用在该装置外套及内锥形套外端面时,内锥形套通过锥面与淬火钢珠 接触点作用的法向力使钢珠产生沿轴滚动及滑动的趋势。为了实现该装置的反向自 锁,内锥形套锥面斜度角必须满足以下两个条件: (1)淬火钢珠相对轴滚动自锁; (2)淬火钢珠相对轴滑动自锁。 下面以淬火钢珠为研究对象,分别就这两方面进行受力分析。 右图淬火钢珠的临界自锁状态受力图。 图中: N——轴对淬火钢珠的法向反作用力; P——外力导致内锥形套通过B点作用于淬火钢珠的法向力;
专业班级 团队成员
总 4 页 第 页 编号:
设计方案报告 光轴快速锁
产品名称
生产纲领
紧装置
件/年
零件名称
生产批量
件/月
1、设计概述
轴向锁紧装置在光、电缆生产设备及其他多种行业的生产设备中广泛应用。 传统的轴向锁紧装置以螺母锁紧装置、紧定螺钉套锁紧装置和销套锁紧装置最为常见: 1、螺母锁紧装置:轴端螺纹往往设计得比较长,而螺距又比较小,已造成装拆效率低或造成裸露过长而强度不高的细螺纹的局 部损伤。 2、紧定螺钉套锁紧装置:为了确保锁紧的可靠性,只有增加螺钉的旋紧力,这样,既增加了拆卸难度,又增加了轴面损伤、螺 钉及套螺孔螺纹损坏的可能。 3、销套锁紧装置:靠套内弹性定位锁销入轴上锁孔而定位的轴向锁紧装置;特点是可靠性高,但轴向调整连续性差。 综上所述,传统的轴向锁紧装置不太适于频繁拆装或轴向调整,且有的锁紧可靠性不高。为此我们要探究制造一种适于频繁拆装 或轴向调整,且锁紧可靠性颇高的轴向锁紧装置,更好地服务应用于各行各业中的生产设备。
2、设计思路和方案
力学中有一类现象称为“自锁现象”,当自锁条件满足时,外力越大,物体保持静止的能力越强.人们利用自锁现象的力学原理 开发出了各种各样的机械工具,这些工具广泛应用于工农业生产中;在日常生活中利用这一原理的现象也随处可见。
依此现象我们设计了一种光杆轴向快速锁紧装置,它的核心部件是内锥形套,其内锥面斜度角的合理选择是该装置可靠性(即反 向自锁性)的首要保障,图 1 为内锥形套结构图。
当轴向外力作用在该装置外套及内锥形套外端面时,内锥形套通过锥面与淬火钢珠接触点作用的法向力使钢珠产生沿轴滚动及滑 动的趋势。为了实现该装置的反向自锁,内锥形套锥面斜度角必须满足以下两个条件:
(1)淬火钢珠相对轴滚动自锁; (2)淬火钢珠相对轴滑动自锁。 下面以淬火钢珠为研究对象,分别就这两方面进行受力分析。
图二淬火钢珠的临界自锁状态受力图。 图中:N——轴对淬火钢珠的法向反作用力;
P——外力导致内锥形套通过 B 点作用于淬火钢珠的法向力; Ta——轴面作用于淬火钢珠的最大静摩擦力;
城市轨道交通课程设计报告很齐全很完整的课程设计
轨道交通课程设计报告 指导老师:江苏大学武晓辉老师 一、项目背景及镇江市轨道交通建设必要性 镇江市位于北纬31°37′~32°19′,东经118°58′~119°58′,地处长江三角洲地区的东端,江苏省的西南部,北临长江,与扬州市、泰州市隔江相望;东、南与常州市相接;西邻南京市。镇江市域总面积3847平方公里,总体规划定位城市性质为国家历史文化名城,长江三角洲重要的港口、风景旅游城市和区域中心城市之一。 ,镇江城市总体规划进入实施阶段,城市空间布局将极大突破现有形态,“扩充两翼、向南延伸”成为城市新的发展方向。伴随城市化进程加快、镇江跨入特大城市行列,城市空间的拓展对城市交通体系提出了新的要求。镇江市为江苏省辖地级市,现辖京口、润州、丹徒三区,代管句容、丹阳、扬中三市。另有国家级经济技术开发区-镇江新区行使市辖区经济、社会管理权限。镇江全市总面积3848平方公里,人口311万人, 市区户籍人口103.3万人市, 市区常住人口122.37万人,人民政府驻润州区南徐大道68号。
内部城市空间结构调整:,镇江城市总体规划进入实施阶段,城市空间布局将极大突破现有形态,“扩充两翼、向南延伸”成为城市新的发展方向。伴随城市化进程加快、镇江跨入特大城市行列,城市空间的拓展对城市交通体系提出了新的要求,建设轨道交通是未来城市规划的必然结果。 城市化发展水平规划: 近期( - ):城市化水平达到:55% 城镇人口162万 中期( -2020):城市化水平达到:60% 城镇人口184万 远期(2020-2050):城市化水平达到:70% 城镇人口231万 城市等级规模规划: 中期:形成1个大城市,1个中等城市,2个小城市和38个小城镇的等级结构。 远期:形成1个特大城市,2个中等城市,1个小城市和27个小城镇的等级结构。 镇江位于南京都市圈核心层,是一座新兴工业城。镇江拥有2个国家级开发区、6个省级开发区、5个国家级高新技术产业基地,镇江市的经济发展水平居江苏省中等偏上水平。实现国内生产总值2927.09亿元,完成公共财政预算收入245.52亿元,城镇居民人均可支配收入32977元,农民人均纯收入16258元,增长18.1%,;人均GDP73947元,居江苏省第5名。“三次产业”分