
第五章 存储器
5-4 (1) 字节= 16KB 142 (2) 16K x 8/ 1K x 1 = 128片
(3) = 10 共需要14 位地址,其中低10 位用于片内地址,余下的高4位经译码后作为个芯片的片选信号
10242
log
5-5 (1) 16K x 8/ 1K x 4 = 32片 (2) 2/64 = 0.03125 s (3) 64, 100%。
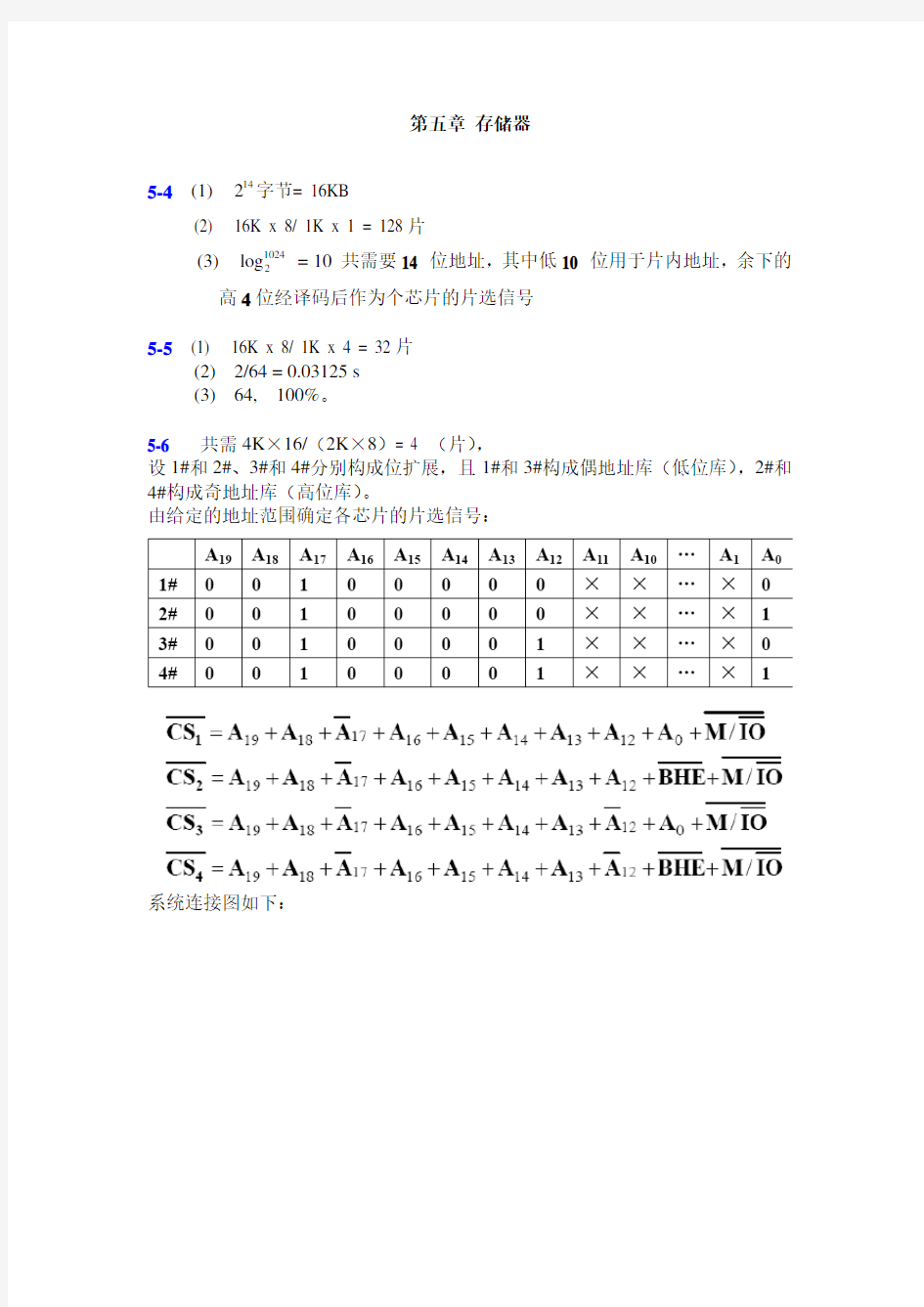
5-6 共需4K ×16/(2K ×8)= 4 (片),
设1#和2#、3#和4#分别构成位扩展,且1#和3#构成偶地址库(低位库),2#和4#构成奇地址库(高位库)。
由给定的地址范围确定各芯片的片选信号:
系统连接图如下:
5-7 16K x 8/ 1K x 1 = 128片,地址线中有 = 10 位参与片内寻址,6位组成片选信号。 10242log
5-8 地址分配不连续,相当数量的地址不能使用,当同时有两个及以上出现低电平时会造成片选混乱。
1512~A A 芯片地址分配如下: 000~3E H E FFH 000~3D H D FFH 000~3B H B FFH 7000~73H FFH
5-9从偶地址读取一个字节数据只需一个总线周期。在此总线周期中,存储器所
需的控制信号及其有效电平分别为:
A 0=0, BHE#=1, RD#=0, WR#=1
5-10 将一个字数据(16位)写入奇地址开始的单元需要两个总线周期才能完成。 第一个总线周期,将低字节写入奇地址单元,所需的控制信号有:
A 0=1, BHE#=0, RD#=1, WR#=0
第二个总线周期,将高字节写入下一个偶地址单元,所需的控制信号有:
A 0=0, BHE#=1, RD#=1, WR#=0
5-112764和6264分别需要4片,分别设为1#~4#。
假设单元地址从00000开始,则可写出各芯片的地址范围如下:
各信片的片选信号逻辑表达式分别为:
4片2764:
4片6264:
系统连接图参考图5-30~图5-32,这里给出译码电路的设计:
5-12第一个地址:57FFH-8K+1=3800H 最后一个地址:57FFH+16K=97FFH
5-158位CPU地址总线共16位。由图可见只用了A
12-0,其余的A
15-13
未参与译码,
因此必然存在地址重叠。 根据存储器连接图得到各芯片的地址范围确定如下表所示:
《微机原理及应用》试题库 1. 8086和8088的引脚信号中, D 为地址锁存允许信号引脚。 A.CLK B.INTR C.NMI D.ALE 2. 下面的哪项是有效标识符: B A . 4LOOP: B. DELAYIS: C. MAIN A/B: D. GAMA$1: 3. 如图所示的三态输出电路,当 A 时,V B≈V DD。 A. E(ENABLE)=1, A=1 B. E(ENABLE)=1, A=0 C. E(ENABLE)=0, A=1 D. E(ENABLE)=0, A=0 4. 设(SS)=2000H,(SP)=0100H,(AX)=2107H,则执行指令PUSH AX 后,存放数据21H的物理地址是 D 。 A. 20102H B. 20101H C. 200FEH D. 200FFH 5. 汇编语言中,为了便于对变量的访问, 它常常以变量名的形式出现在程序中, 可以认为它是存放数据存储单元的 A 。 A.符号地址B.物理地址C.偏移地址D.逻辑地址 6. 下列四个寄存器中,不能用来作为间接寻址方式的寄存器是 A 。 A. CX B. BX C. BP D. DI (C)7. 执行下列程序段: MOV AX,0 MOV BX,1 MOV CX,100 AA:ADD AX,BX INC BX LOOP AA HLT 执行后的结果:(AX)= ,(BX)= 。 A. 5050,99 B. 2500,100 C. 5050,101 D. 2550,102 8. 假设V1和V2是用DW定义的变量,下列指令中正确的是 A 。 A.MOV V1, 20H B.MOV V1, V2 C.MOV AL, V1 D.MOV 2000H, V2 9. – 49D的二进制补码为 A 。
本次作业是本门课程本学期的第3次作业,注释如下: 一、单项选择题(只有一个选项正确,共11道小题) 1. 一点作曲线运动,开始时速度 v0=10m/s , 某瞬时切向加速度a t=4m/s2,则2s末该点的速度的大小为。 (A) 2 m/s (B) 18 m/s (C) 12 m/s (D) 无法确定 你选择的答案:[前面作业中已经做正确] [正确] 正确答案:B 解答参考: 2. 点作曲线运动,若其法向加速度越来越大,则该点的速度。 (A) 越来越大 (B) 越来越小 (C) 大小变化不能确定 你选择的答案: C [正确] 正确答案:C 解答参考: 3. 若点的运动方程为,则它的运动轨迹是。 (A) 半圆弧 (B) 圆周 (C) 四分之一圆弧 (D) 椭圆 你选择的答案: B [正确] 正确答案:B 解答参考: 4. 图示均质杆的动量p= 。杆的质量为m,绕固定轴O转动,角速度均为 。
(A) mlω (B) mlω (C) mlω (D) 0 你选择的答案: A [正确] 正确答案:A 解答参考: 5. 图示均质圆盘质量为m,绕固定轴O转动,角速度均为ω。对转轴O的动量矩L O的大小和方向为。 (A) L O=mr2ω (顺时针方向) (B) L O=m r2ω (顺时针方向) (C) L O=m r2ω (顺时针方向)
你选择的答案:[前面作业中已经做正确] [正确] 正确答案:C 解答参考: 6. 已知P= kN,F1=,物体与地面间的静摩擦因数f s=,动摩擦因数f d=则 物体所受的摩擦力的大小为。 (A) kN (B) kN (C) kN (D) 0 你选择的答案:[前面作业中已经做正确] [正确] 正确答案:B 解答参考: 7. 已知物块与水平面间的摩擦角,今用力F1=推动物块,P=1kN。则物块将。 (A) 平衡 (B) 滑动 (C) 处于临界平衡状态 (D) 滑动与否不能确定 你选择的答案:[前面作业中已经做正确] [正确]
····································密························封························线································ 学生答题不得超过此线 一、单项选择题(每小题1分,共20分。请将答案填入答题单) 1.8086CPU由两个独立的工作单元组成,它们是执行单元EU和( ). A)总线控制逻辑器 B)内部通信寄存器 C)指令寄存器 D)总线接口单元 2.8086系统若用256KB*1动态存储器芯片可望构成有效存储系统的最小容量是( ). A)256KB B)512KB C)640KB D)1MB 3.Intel8255A使用了()个端口地址。 A)1 B)2 C)3 D)4 4.PC机中为使工作于一般全嵌套方式的8259A中断控制器能接受下一个中断请求,在中断服务程序结束处就( ). A)发送OCW2指令 B)发送OCW3指令 C)执行IRET指令 D)执行POP指令 5.RAM是随机存储器,它分为( )两种. A)ROM和SRAM B)DRAM和SRAM C)ROM和DRAM D)ROM和CD-ROM 6.在程序运行过程中,确定下一条指令的物理地址的计算表达式是() A)CS×16+IP B)DS×16+SI C)SS×16+SP D)ES×16+DI 7.( )是以CPU为核心,加上存储器,I/O接口和系统总线构成的. A)微处理器 B)微型计算机 C)微型计算机系统 D)计算机 8.对于掉电,8086/8088CPU是通过( )来处理的. A)软件中断 B)可屏蔽中断 C)非屏蔽中断 D)DMA 9.计算机的存储器采用分级存储体系的主要目的是()。 A)便于读写数据 B)减小机箱的体积 C)便于系统升级 D)解决存储容量、价格和存取速度之间的矛盾 10.8259A的OCW1----中断屏蔽字( )设置. A)在ICW之前 B)只允许一次 C)可允许多次 D)仅屏蔽某中断源时11.将十六进制数163.5B转换成二进制数是)( ) A)1101010101.1111001 B)110101010.11001011 C)1110101011.1101011 D)101100011.01011011 12.Intel 8086/8088微处理器有()地址线,直接寻址内存空间的范围是()。 A)10条,64KB B)20条,64KB C)16条,1M D)20条,1M 13.Intel 8086/8088微处理器的标志寄存器中,作为记录指令操作结果的标志是()。 A)CF,OF,PF,AF,SF,ZF B) CF,PF,ZF,SF C) OF,DF,IF,SF,ZF,CF D) IF,DF,OF,CF 14.下述对标志寄存器中标志位不产生影响的指令是()。 A)JMP NEXT B) TEST AL,80H C) SHL AL,1 D) INC SI 15.简单的汇编语言程序可以通过()来建立、修改和执行。 A)连接程序 B) 调试程序 C) 汇编程序 D) 编辑程序 16.累加器AL中的内容是74H,执行CMP AL,47H指令后,累加器AL中的内容是()。
本次作业是本门课程本学期的第1次作业,注释如下: 一、单项选择题(只有一个选项正确,共26道小题) 1. 考虑力对物体作用的运动效应和变形效应,力是。 (A) 滑动矢量 (B) 自由矢量 (C) 定位矢量 正确答案:C 解答参考: 2. 考虑力对物体作用的运动效应,力是。 (A) 滑动矢量 (B) 自由矢量 (C) 定位矢量 正确答案:A 解答参考: 3. 图示中的两个力,则刚体处于。 (A) 平衡 (B) 不平衡 (C) 不能确定 你选择的答案:[前面作业中已经做正确] [正确] 正确答案:B 解答参考: 4.
作用力的大小等于100N,则其反作用力的大小为。 (A) (B) (C) 不能确定 你选择的答案:[前面作业中已经做正确] [正确] 正确答案:B 解答参考: 5. 力的可传性原理只适用于。 (A) 刚体 (B) 变形体 (C) 刚体和变形体 你选择的答案:[前面作业中已经做正确] [正确] 正确答案:A 解答参考: 6. 图示结构,各杆自重不计,则杆BC是。
(A) 二力杆 (B) 不能确定 你选择的答案:[前面作业中已经做正确] [正确] 正确答案:A 解答参考: 7. 图示作用于三角架的杆AB中点处的铅垂力如果沿其作用线移动到杆BC的中点,那么A、C处支座的约束力的方向。 (A) 不改变 (B) 改变 (C) 不能确定 你选择的答案:[前面作业中已经做正确] [正确] 正确答案:B 解答参考: 8.
图示构架ABC中,力作用在销钉C上,则销钉C对杆AC的作用力与销钉C对杆B C的作用力。 (A) 等值、反向、共线 (B) 分别沿AC和BC (C) 不能确定 你选择的答案:[前面作业中已经做正确] [正确] 正确答案:B 解答参考: 9. 如图所示,物体处于平衡,,自重不计,接触处是光滑的,图中所画受力图。 (A) 正确 (B) 不正确
《微机原理及应用》试题库 1. 8086 和 8088 的引脚信号中,D为地址锁存允许信号引脚。 A. CLK B. INTR C.NMI D.ALE 2.下面的哪项是有效标识符:B A . 4LOOP : B. DELAYIS : C. MAIN A/ B : D.GAMA$1 : 3.如图所示的三态输出电路,当 A 时, V B≈V DD。 A. E(ENABLE)=1, A=1 B.E(ENABLE)=1, A=0 C. E(ENABLE)=0, A=1 D.E(ENABLE)=0, A=0 4. 设 (SS)=2000H , (SP)=0100H , (AX)=2107H ,则执行指令PUSH AX后,存放数据21H 的物理地址是 D。 A. 20102H B. 20101H C. 200FEH D. 200FFH 5. 汇编语言中,为了便于对变量的访问, 它常常以变量名的形式出现在程序中, 可以认为它是存放数据存储单元的A。 A.符号地址B.物理地址C.偏移地址 D .逻辑地址 6. 下列四个寄存器中,不能用来作为间接寻址方式的寄存器是A。 A. CX B. BX C. BP D. DI (C)7. 执行下列程序段: MOV AX ,0 MOV BX ,1 MOV CX , 100 AA : ADD AX ,BX INC BX LOOP AA HLT 执行后的结果:(AX)=,(BX)=。 A. 5050 , 99 B. 2500, 100 C. 5050 , 101 D. 2550 , 102 8. 假设 V1 和 V2 是用 DW 定义的变量,下列指令中正确的是A。 A . MOV V1, 20H B. MOV V1, V2 C . MOV AL, V1D. MOV2000H, V2 9. –49D 的二进制补码为A。
重庆科技学院试卷库系统试卷库导出试卷 微机原理及应用-编程题(43题) 题序:0017题型:06难度:01分值:10.0章号:03节号:02 知识点: 。8086/8088指令系统 题干: 变量DATAX和DATAY定义如下: DATAX DW 0148H DW 2316H DA TAY DW 0237H DW 4052H 试编写一个程序段,实现将DATAX和DA TAY两个字数据相乘(用MUL)。答案: 解:(1) MOV AX, DATAX MUL DATAY MOV DATAY,AX MOV DATAY+2,DX 题序:0018题型:06难度:02分值:10.0章号:03节号:02 知识点: 。8086/8088指令系统 题干: 变量DATAX和DATAY定义如下: DATAX DW 0148H DW 2316H DA TAY DW 0237H DW 4052H 试编写一个程序段,实现将DATAX除以23(用DIV)。 答案: 解:(1) MOV AX, DATAX MOV BL, 23 DIV BL MOV BL,AH
MOV AH, 0 MOV DATAY, AX 。存放商 MOV AL,BL MOV DATAY+2, DX 。存放余数 题序:0002题型:06难度:03分值:10.0章号:03节号:02 知识点: 。8086/8088指令系统 题干: 试编写一个程序段,实现将BX中的数除以10,结果仍放在BX中。 答案: 解: MOV CL,0AH MOV AX,BX DIV CL MOV BX,AX 题序:0016题型:06难度:03分值:10.0章号:03节号:02 知识点: 。8086/8088指令系统 题干: 变量DATAX和DATAY定义如下: DATAX DW 0148H DW 2316H DA TAY DW 0237H DW 4052H 试编写一个程序段,实现将DATAX和DA TAY中的两个双字数据相加, 和存放在DA TAY和答案: 解:(1) MOV AX, DATAX ADD AX, DATAY MOV BX, DATAX+2 ADD BX, DATAY+2 MOV DATAY, AX MOV DATAY+2, BX
理论力学B 1只要知道作用在质点上的力,那么质点在任一瞬时的运动状态就完全确定了。()正确答案:错误 2在惯性参考系中,不论初始条件如何变化,只要质点不受力的作用,则该质点应保持静止或等速直线运动状态。()正确答案:正确 3作用于质点上的力越大,质点运动的速度也越大。()正确答案:错误 4牛顿定律适用于任意参考系。()正确答案:错误 5二力平衡条件中的两个力作用在同一物体上;作用力和反作用力分别作用在两个物体上。()正确答案:正确 6分力一定小于合力。()正确答案:错误 7 刚体的平衡条件是变形体平衡的必要条件,而非充分条件。()正确答案:正确 8 物体的最大静摩擦力总是与物体的重量P成正比,即Fmax = fs P。正确答案:错误 9若系统的总动量为零,则系统中每个质点的动量必为零。()正确答案:错误 10冲量的量纲与动量的量纲相同。()正确答案:正确 11质点系的内力不能改变质点系的动量与动量矩。()正确答案:错误 12质点系内力所做功之代数和总为零。()正确答案:错误 13如果某质点系的动能很大,则该质点系的动量也很大。()正确答案:错误 14点的牵连速度是动参考系相对于固定参考系的速度。()正确答案:错误 15点的牵连加速度是动参考系相对于固定参考系的加速度。()正确答案:错误 16当牵连运动为平动(移动)时,相对加速度等于相对速度对时间的一阶导数。()正确答案:正确 17力对任一点之矩在通过该点的任意轴上的投影等于力对该轴之矩。()正确答案:正确 18当力与轴共面时,力对该轴之矩等于零。()正确答案:正确 19在空间问题中,力偶对刚体的作用完全由力偶矩矢决定。()正确答案:正确 20定轴转动刚体上与转动轴平行的任一直线上的各点加速度的大小相等,而且方向也相同。()正确答案:正确 21刚体作平动(移动)时,其上各点的轨迹相同,均为直线。()正确答案:错误 22 刚体作定轴转动时,垂直于转动轴的同一直线上的各点,不但速度的方向相同而且其加速度的方向也相同。()正确答案:正确 23两个作定轴转动的刚体,若其角加速度始终相等,则其转动方程相同。()正确答案:错误 24刚体平动时,若刚体上任一点的运动已知,则其它各点的运动随之确定。()正确答案:正确 25运动学只研究物体运动的几何性质,而不涉及引起运动的物理原因。()正确答案:正确 26在某瞬时,点运动的切向加速度和法向加速度都等于零,则该点一定作匀速直线运动。()正确答案:正确 27已知点运动的轨迹,并且确定了原点,则用弧坐标s(t)可以完全确定动点在轨迹上的位置。()正确答案:正确 1.质点系内力所做功之代数和总为零。()说法错误 2.刚体作平动(移动)时,其上各点的轨迹相同,均为直线。()说法错误 3. 在自然坐标系中,如果速度的大小ν=常数,则其切向加速度at=0. 说法正确 4. 在惯性参考系中,不论初始条件如何变化,只要质点不受力的作用,则该质点应保持静
CH04 存储系统 习题与思考题 1.存储器的哪一部分用来存储程序指令及像常数和查找表一类的固定不变的信息?哪一部分用来存储经常改变的数据? 解答:只读存储器ROM;随机存储器RAM。 2.术语“非易失性存储器”是什么意思?PROM和EPROM分别代表什么意思? 解答:“非易失性存储器”是指当停电后信息会丢失;PROM--可编程序的只读存储器PROM(Programmable ROM),EPROM--可擦除的可编程的只读存储器EPROM(Erasible Programmable ROM)。 3.微型计算机中常用的存储器有哪些?它们各有何特点?分别适用于哪些场合? 解答: 双极型半导体存储器 随机存储器(RAM) MOS存储器(静态、动态) 主存储器可编程只读存储器PROM 可擦除可编程只读存储器EPROM,EEPROM 只读存储器(ROM)掩膜型只读存储器MROM 快擦型存储器 存储器磁盘(软盘、硬盘、盘组)存储器 辅助存储器磁带存储器 光盘存储器 缓冲存储器 4.现代计算机中的存储器系统采用了哪三级分级结构,主要用于解决存储器中存在的哪些问题? 解答:目前在计算机系统中通常采用三级存储器结构,即使用高速缓冲存储器、主存储器和辅助存储器,由这三者构成一个统一的存储系统。从整体看,其速度接近高速缓存的速度,其容量接近辅存的容量,而位成本则接近廉价慢速的辅存平均价格。三级结构主要用于解决速度、容量和成本的问题。 5.试比较静态RAM和动态RAM的优缺点,并说明有何种方法可解决掉电时动态RAM中信息的保护。 解答:静态RAM----存储一位信息的单元电路可以用双极型器件构成,也可用MOS器件构成。双极型器件构成的电路存取速度快,但工艺复杂,集成度低,功耗大,一般较少使用这种电路,而采用MOS器件构成的电路。静态RAM的单元电路通常是由6个MOS 管子组成的双稳态触发器电路,可以用来存储信息“0”或者“1”,只要不掉电,“0” 或“1”状态能一直保持,除非重新通过写操作写入新的数据。同样对存储器单元信息的读出过程也是非破坏性的,读出操作后,所保存的信息不变。使用静态RAM的优点是访问速度快,访问周期达20~40ns。静态RAM工作稳定,不需要进行刷新,外部电
第一学期西南交大理论 力学C第次作业答案 Document number【980KGB-6898YT-769T8CB-246UT-18GG08】
本次作业是本门课程本学期的第1次作业,注释如下: 一、单项选择题(只有一个选项正确,共26道小题) 1. 考虑力对物体作用的运动效应和变形效应,力是。 (A) 滑动矢量 (B) 自由矢量 (C) 定位矢量 正确答案:C 解答参考: 2. 考虑力对物体作用的运动效应,力是。 (A) 滑动矢量 (B) 自由矢量 (C) 定位矢量 正确答案:A 解答参考: 3. 图示中的两个力,则刚体处于。 (A) 平衡 (B) 不平衡 (C) 不能确定 正确答案:B 解答参考: 4. 作用力的大小等于100N,则其反作用力的大小为。 (A)
(B) (C) 不能确定 正确答案:B 解答参考: 5. 力的可传性原理只适用于。 (A) 刚体 (B) 变形体 (C) 刚体和变形体 正确答案:A 解答参考: 6. 图示结构,各杆自重不计,则杆BC是。 (A) 二力杆 (B) 不能确定 正确答案:A 解答参考: 7. 图示作用于三角架的杆AB中点处的铅垂力如果沿其作用线移动到杆BC的中点,那么A、C处支座的约束力的方向。 (A) 不改变 (B) 改变 (C) 不能确定 正确答案:B 解答参考: 8. 图示构架ABC中,力作用在销钉C上,则销钉C对杆AC的作用力与销钉C对杆BC的作用力。 (A) 等值、反向、共线
(B) 分别沿AC和BC (C) 不能确定 正确答案:B 解答参考: 9. 如图所示,物体处于平衡,,自重不计,接触处是光滑的,图中所画受力图。 (A) 正确 (B) 不正确 (C) 不能确定 正确答案:A 解答参考: 10. 如图所示,物体处于平衡,自重不计,接触处是光滑的, 图中所画受力图是。 (A) 正确 (B) A处约束力不正确 (C) 不能确定 正确答案:B 解答参考: 11. 如图所示,各杆处于平衡,杆重不计,接触处是光滑的,图中所画受力图。 (A) 正确 (B) A处及B处约束力不正确 (C) 不能确定 正确答案:B 解答参考: 12. 如图所示,梁处于平衡,自重不计,接触处是光滑的,图中所画受力图是。 (A) 正确 (B) B处约束力不正确
达朗伯原理作业B 参考解答 1.如题图所示,均质细圆环的质量为m ,半径为r ,C 为质心。圆环在铅垂平面内,可绕位于圆环周缘的光滑固定轴O 转动。圆环于OC 水平时,由静止释放,要求用达朗伯原理求释放瞬时圆环的角加速度及轴承O 的约束力。 解: 将惯性力向质心C 简化,其受力(含惯性力)图见右下。 其中 αα2I I , mr M mr F C == 由动静法得 0 , 0Ox =?=∑F F x r g rmg rF M F M O 2 ,0 , 0)(I IC =?=?+=∑αv 2 , 0 , 0I mg F mg F F F Oy Oy y = ?=?+=∑
2.重物A 质量为m 1,系在绳子上,绳子跨过不计质量的固定滑轮D ,并绕在鼓轮B 上,如题图所示。由于重物下降,带动了轮C ,使它沿水平轨道滚动而不滑动。设鼓轮半径为r ,轮C 的半径为R ,两者固连在一起,总质量为m 2,对于其过质心C 的水平轴的回转半径为ρ 。要求用达朗伯原理求鼓轮B 的角加速度和鼓轮B 所受摩擦力。 解:在定滑轮质量不计的假设下,定滑轮两端绳子拉力相等。受力图(含惯性力)如右下所示 对物块A 对轮C 注意有运动学关系 和 可解得 0 ,011T =?+=∑g m a m F F y 0)( ,0)(0 ,02T S 2T =++?==??=∑∑C C E C x a Rm F R r J M F a m F F αF R a R r R r a C )()(+=+=α2 2ρ m J C =212221)()() (r R m R m r R g m ++++= ραa a 1 A m 2 12222 21S )()()(r R m R m Rr g m m F +++?=ρρ
微机原理与应用试卷 一、单项选择题(每小题 1 分共 10 分) 1.十进制33.25转换成十六进制数为( ) A. B1.4H B. 1B.19H C. 21.4H D. 33.4H 2. 若有16条地址线,那么可访问的内存地址范围为。( ) A. 0001H~FFFFH B. 0000H~FFFFH C. 00000H~FFFFFH D. 00001H~FFFFFH 3. 8086 CPU内有指示下条指令有效地址的指示器是( ) A. IP B. SP C. BP D. SI 4.下列指令中语法有错误的是( ) A. IN AX,20H B. LEA SI,[2000H] C. OUT DX,AL D. SHL AX,2 5. 8088CPU内部的数据总线有多少条( ) A. 8条 B. 16条 C. 20条 D. 32条 6. 若(AL)=0FH,(BL)=04H,则执行CMP AL,BL后,AL和BL的内容为( ) A. 0FH和04H B. 0BH和04H C. 0FH和0BH D. 04H和0FH 7. 指令MOV AX,[BX][SI]中源操作数的寻址方式是。( ) A. 寄存器间接寻址 B. 变址寻址 C. 基址变址寻址 D. 相对寻址 8. 与MOV BX,OFFSET X等价的指令是( ) A. MOV BX,X B. LDS BX,X C. LES BX,X D. LEA BX,X 9. 不能实现将AX清零和CF清零的指令是() A. SUB AX,AX B. MOV AX,0 C. XOR AX,AX D. AND AX,0 10.可编程计数/定时器8253的工作方式有几种() A. 3 B. 4 C. 5 D. 6 二、填空题(每空2分,共20分) 1. 计算机通常___________和___________是核心部件,合称为中央处理单元CPU。 2. 8086CPU通过数据总线对__________进行一次访问所需要的时间为一个总线周期,一个总线周期至少包括__________时钟周期。 3. 组成16M*8位的存储器,需要1M*4位的存储芯片___________片。 4. 微机中一般采用__________芯片作为串行通信接口。 5.在8086CPU系统中,设某中断源的中断类型码为08H,中断矢量为0100H:1000H,则相应的中断矢量存储地址为__________;从该地址开始,连续的4个存储单元存放的内容依次为__________。
《微机原理及应用》习题答案 教材:《80X86/Pentium 微型计算机原理及应用》答案第一章 计算机基础 1-3 (1)01101110 真值=110 (2)10001101 真值=-13 1-4 (1)+010111 [+010111]原=[+010111]反=[+010111]补=00010111 (2) +101011 [+101011]原=[+101011]反=[+101011]补=00101011 (3) - 101000 [-101000]原=10101000 [-101000]反= 11010111 [-101000]补=11011000 (4) -111111 [-111111]原=10111111 [-111111]反= 11000000 [-111111]补=11000001 1- 6 (1) [x1+y1] 补=[x1]补+ [y1]补 =00010100+00100001=00110101 (2) [x2-y2]补=[x2]补+ [-y2]补 =11101100+00100001=00001101 1- 7 (1) 85+60 解:[-85] 补=10101011 [60] 补=00111100 [-85] 补+[60] 补=10101011+00111100=11100111 (11100111)补=10011001 真值=—25 CS= 0, CP=0, CS? CP= 0 无溢出 (4)-85-60 [-85] 补=10101011 [-60] 补=11000100 [-85] 补+[-60] 补=10101011+11000100=101101111 CS=1, CP=0 CS? CP=1 有溢出1- 8 (1) [x] 补+ [y] 补=01001010+01100001=10101011 CS=0, CP=1 CS? CP=1 有溢出⑵[X] 补-[y]补=[x]补+ [-y]补 =01001010- 01100001=01001010+10101010 =100010110 CS=1, CP=1 CS? CP=0 无溢出1- 9 (1) (127)10=(000100100111)BCD (2) (74)H=(116)10=(000100010110)BCD (1) 41H 代表 A (2) 72H 代表r (3) 65H 代表e (4) 20H 代表SP 1-14 (1) 69.57 (69.57)10=(1000101.100)B=0.1000101100 X 27 =0.1000101100 X 2+111 浮点规格数为011101000101 (2) -38.405 (-38.405)10=(-100110.011)B -100110.011= -0.100110011 x 26 = - 0.100110011 x 2110 浮点规格数为011011001100 (3) - 0.3125 (-0.3125)10=(-0.0101)2=(-0.101)2 x 2-001 浮点规格数为111111010000 1. +0.00834 2. (+0.00834)10=(0.000000100010001)2=(0.100010 001)2 x 2-110 3. 浮点规格数为101001000100 4. 1-15 5. (1) (69.57)10=(1000101.10010001111010111)2 6. =(1.00010110010001111010111)2 x 2110 7. p=6+127=133=(10000101)2 8. 单精度浮点数为 01000010100010110010001111010111 9. ( 2) (-38.405)10=(-100110.011001111010111000)2 10. = - (1.00110011001111010111000)2 x 2101 11. p=5+127=132=(10000100)2 12. 单精度浮点数为 11000010000110011001111010111000 13. (3) (-0.3125)10=(-0.0101)2=(-1.01)2 x 2-10 14. p=-2+127=125=(1111101)2 15. 单精度浮点数为 10111110101000000000000000000000 第二章80X86/Pentium 微处理器 2- 3 IO/M DT/R DEN RD WR 读存储器0 0 0 0 1 写存储器0 1 0 1 0 2- 17 PA=CS x 16+IP IP 的范围为OOOOH?FFFFH而CS 为 A000H 因此PA的范围即现行代码段可寻址的存储空间范围为 1-10
扬州大学试题纸Array ( 2009-2010学年第1学期) 广陵学院07 班(年)级课程微机原理及应用 (A)卷 1. 以程序存储和程序控制为基础的计算机结构提出者是(B ) A.布尔 B.冯﹒诺依曼 C.图灵 D.帕斯卡尔 2.十进制数95转换成二进制数是(D ) A. 10010101 B. 01100101 C. 0100110 D. 01011111 3.大写字母C的ASCII码是(C ) A. 11001100B B. 00001100B C. 01000011B D. 01000111B 4.在微机中,主机和高速硬盘进行数据交换,一般采用的方式是( D) A. 程序直接控制方式 B. 程序中断控制方式 C. 无条件传送方式 D. DMA方式 5.将寄存器AX的内容求反的正确指令是( C ) A. NEG AX B. CMP AX,0FFFFH C. NOT AX D. CMP AX,AX 6. 指令MOV ARRAY[DI],DX 源操作数的寻址方式是(B ) A.变址寻址 B.寄存器寻址 C.基址寻址 D.基址变址寻址 7. 8086/8088响应不可屏蔽中断时,其中断类型号是(A ) A.由CPU自动产生 B.从外设取得 C.由指令INT给出 D.由中断控制器提供 8.8086指令队列的长度是 ( C ) A. 4个字节 B.5个字节 C.6个字节 D.8个字节 M/、WR、RD信号的状态依次9. 在最小模式下,CPU从外设读取数据操作,IO 为( A ) A. 0,1,0 B. 0,三态,0 C. 0,0,1 D. 1,1,0 10.在8086系统中,CPU被启动后,IP及四个段寄存器的初始状态是(D )
达朗伯原理作业参考答案及解答 1.汽车以加速度a 作水平直线运动,如图所示。若不计车轮质量,汽车的总质量为m ,质心距地面的高度为h 。若汽车的前后轮轴到过质心的铅垂线的距离分别等于l 1和l 2。试求前后轮的铅垂压力;并分析汽车行驶加速度a 为何值时其前后轮的压力相等(滚动摩擦阻力不计)? 答案:h l l g a 2) (21?=
2.为了用实验方法测定无轨电车的减速度,采用了液体加速度计,它是由一个盛有油并安放在铅垂平面内的折管构成。当电车掣动时,安放在运动前进方向的一段管内的液面上升到高度h 2,而在反向的一段管内的液面则下降到高度h 1。加速度计的安放位置如图所示,θ1=θ2=45°,且已知h 1=250mm ,h 2=750mm 。试求此时电车的减速度大小。 2 211cot cot θθh h d += 当电车掣动时,筒中两端油的高差为12h h ?,取油面上一滴油为研究对象,其受力图(含虚加惯性力)如下图。 由 0sin cos ,0=??=∑θθmg ma F x 注意到几何关系 2 2111 212cot cot tan θθθh h h h d h h +?=?= 解得 g h h h h g h h h h g g a 5.0) (cot cot )(tan 2 112221112=+?=+?= =θθθ
3.题图所示均质杆AB 的质量为4kg ,置于光滑的水平面上。在杆的B 端作用一水平推力F = 60N ,使杆AB 沿F 力方向作直线平移。试求AB 杆的加速度和角 θ 之值。 答案:o 33.2 ,654.0 tan ,m/s 152====== θθF mg a g m F a 4.在题图所示系统中,已知:均质杆AB 的长为l ,质量为m ,均质圆盘的半径为r ,质量也为m ,在水平面上作纯滚动。在图示位置由静止开始运动。试求该瞬时:(1)杆AB 的角加速度;(2)圆盘中心A 的加速度a A 。 解:先进行运动分析,显然杆AB 和轮A 均作平面运动,由运动学关系有 AB t CA t CA A C A A l a a a a r a αα2 ,,=+== 取整体为研究对象,加上惯性力,其受力图见下左图 各惯性力和力偶为 (1) 2 1 , , 121 ,21 21y I x I I 2I 2I AB C A C A AB C A A A ml F ma F F ml M mra mr M ααα======
第一次课外作业题参考答案 1微型计算机由哪5个主要部件组成?微型计算机系统包含哪些部分 答:微型计算机的5个主要组成部分:运算器、控制器、存储器、输入设备、输出设备。微型计算机系统包含:硬件和软件,其中硬件包括微型计算机和外设,软件包括系统软件和应用软件。 2微机总线包括哪几类总线? 答:地址总线AB, 数据总线DB,控制总线CB。 3请简要描述数据总线、地址总线和控制总线的基本特点。 答:地址总线AB:单向,用来传送CPU输出的地址信号,确定被访问的存储单元、I/O端口,地址总线的条数决定CPU的寻址能力。 数据总线DB:双向,用来在CPU与存储器、I/O接口之间进行数据传送,其条数决定一次可最多传送数据的宽度。 控制总线CB:双向,用于传送各种控制信号。 1.CPU内部由哪几个主要功能部件构成?各自的主要作用是什么? 答:CPU是微机的核心芯片,它包括运算器、控制器和寄存器。 运算器的功能是完成数据的算术和逻辑运算。 控制器一般由指令寄存器、指令译码器和控制电路组成。控制器的功能是根据指令的要求,对微型计算机各部件发出相应的控制信息,使它们协调工作,从而完成对整个计算机系统的控制。 CPU内部的寄存器是用来存放经常使用的数据的。 2.指令译码器起什么作用? 答:指令译码器对指令寄存器中的操作码字段进行分析,识别该指令规定的操作,向操作控制器发出具体操作的特定信号。 3.请简述诺依曼计算机的工作原理(指令执行过程或计算机是如何执行一条指 令的)。 答:先由指令寄存器IP给出指令所在内存的地址,地址经地址寄存器—地址总线—地址译码器,选中指令所在的内存的单元,CPU发出内存读控制信
第一学期西南交大理论 力学c第次作业答案 Revised as of 23 November 2020
本次作业是本门课程本学期的第1次作业,注释如下: 一、单项选择题(只有一个选项正确,共26道小题) 1. 考虑力对物体作用的运动效应和变形效应,力是。 (A) 滑动矢量 (B) 自由矢量 (C) 定位矢量 正确答案:C 解答参考: 2. 考虑力对物体作用的运动效应,力是。 (A) 滑动矢量 (B) 自由矢量 (C) 定位矢量 正确答案:A 解答参考: 3. 图示中的两个力,则刚体处于。 (A) 平衡 (B) 不平衡 (C) 不能确定 正确答案:B 解答参考: 4. 作用力的大小等于100N,则其反作用力的大小为。 (A) (B)
(C) 不能确定 正确答案:B 解答参考: 5. 力的可传性原理只适用于。 (A) 刚体 (B) 变形体 (C) 刚体和变形体 正确答案:A 解答参考: 6. 图示结构,各杆自重不计,则杆BC是。 (A) 二力杆 (B) 不能确定 正确答案:A 解答参考: 7. 图示作用于三角架的杆AB中点处的铅垂力如果沿其作用线移动到杆BC的中点,那么A、C 处支座的约束力的方向。 (A) 不改变 (B) 改变 (C) 不能确定 正确答案:B 解答参考: 8. 图示构架ABC中,力作用在销钉C上,则销钉C对杆AC的作用力与销钉C对杆BC的作用力。 (A) 等值、反向、共线 (B) 分别沿AC和BC (C) 不能确定
正确答案:B 解答参考: 9. 如图所示,物体处于平衡,,自重不计,接触处是光滑的,图中所画受力图。 (A) 正确 (B) 不正确 (C) 不能确定 正确答案:A 解答参考: 10. 如图所示,物体处于平衡,自重不计,接触处是光滑的, 图中所画受力图是。 (A) 正确 (B) A处约束力不正确 (C) 不能确定 正确答案:B 解答参考: 11. 如图所示,各杆处于平衡,杆重不计,接触处是光滑的,图中所画受力图。 (A) 正确 (B) A处及B处约束力不正确 (C) 不能确定 正确答案:B 解答参考: 12. 如图所示,梁处于平衡,自重不计,接触处是光滑的,图中所画受力图是。 (A) 正确 (B) B处约束力不正确 (C) 不能确定 正确答案:B
电气工程及其自动化专业《微机原理及应用》试题 一、填空题(每空1分) 1. 微型计算机系统的主要性能指标有:字长、存储容量、指令系统、运算速度、系统配置。 2.微型计算机系统硬件包括:运算器、控制器、存储器、输入设备、输出设备等部 件,这些部件通过数据总线、地址总线、控制总线相连接。 3. 8086的标志寄存器中控制标志有:IF、DF、TF。 4. 8086的标志寄存器中状态标志有: CF 、 AF 、 ZF 、 PF 、 SF 、 OF 。 5. 随机存储器RAM可分为双极型和 MOS型两大类。 6. 只读存储器ROM可分为:ROM、PROM、EPROM、EEPROM。 7. 8255A是可编程并行输入/输出接口,它有3个8位端口,3种工作方式。 8. 8253是可编程定时器/计数器,它有 3 个计数通道, 6 种工作方式。 9. 串行通信中的数据传送模式有:单工,半双工,全双工。 10. 串行通信中最基本的通信方式:异步通信,同步通信。 11. ADC0809有 8 个模拟量输入信号,可用 3 位地址信号控制,有 8 位数据输出。 12. DAC0832是可编程数/模转换器,有8位数字量输入信号,2个模拟量输出信号,可设置3 种工作方式。 13. 8259A是可编程中断控制器,它有 4 个初始化命令字, 3 个操作命令字。 14.汇编语言指令语句格式: [标号:]操作码助记符[操作数1][,操作数2][;注释] 15.CPU和输入/输出设备之间传送的信息有数据信息、状态信息、控制信息。 16. 串行通信中信号传输时的调制解调方式有:调频、调幅、调相。 17. DAC0832可工作在直通、单缓冲、双缓冲三种方式。 18.地址译码的方式有线译码、部分译码、全译码三种。 19.RS-232C串行通信接口T X D和R X D信号的电气性能中“1”= -3~-25V ;“0”= +3~+25V 。20.8237是可编程DMA控制器,它有 4个独立的DMA 通道。 21. 8253每个计数器有 2 种计数方式,计数范围分别为: BCD 0~9999 ;二进制 0~FFFFH 。22.TTL电平经 1488 转换为RS-232C电平,RS-232C电平经 1489 转换为TTL电平。 23. 8086处理器的基本数据类型是字节、字、双字。 24. 8086指令的操作数寻址方式有:立即数、寄存器、存储单元、 I/O端口。25.常见A/D转换器的类型有:并行比较型、双积分型、逐次比较型。 26. 一个计算机系统所具有的物理地址空间的大小是由地址总线的宽度决定的,8086系统的物 理空间的地址为 1M 。 27. 8086EU的主要部件有算术逻辑单元寄存器组,主要完成编码和运算工作。 28. 堆栈段的基值存入 SS 寄存器,数据段的基值存入 DS 寄存器,代码段的基值存于 CS 寄 存器,扩展段的基值存入 ES 寄存器。 29. 8086CPU引脚中,用来控制8086工作方式的引脚为 MN/MX 。 30. 8086CPU引脚中BP默认的段寄存器是(SS),BX默认的段存器是(DS)。
武汉大学2007~2008年第一学期 微机原理与接口技术考试试卷(A) 专业学号姓名成绩 一、填空题(每空1分,共20分) 1. 完成下列程序段,从240H端口读取数据,测试其是否为20H,若不是则将241H端口清0,否则转向NEXT。 MOV DX , (1) (2) AL, DX (3) AL, 20H (4)______ MOV DX,(5) MOV AL,0 OUT DX,AL ….. NEXT: …… 2. 图1中的一个共阴极数码管通过8255A和系统ISA总线相连,请完成下列程序段,使该数码管稳定显示“8”(字型编码为7FH)。 图1 MOV DX, (6) MOV AL, (7) OUT DX, AL ;初始化82C55 MOV DX, (8) MOV AL, (9) (10) ;数码管稳定显示“8” 3..8086 CPU有条地址线,可形成的存储器地址空间,地址范围为。 4..中断类型号为24H的中断向量存放在开始的存储单元。 5..一台微机的地址总线为16条,其RAM存储器容量为16KB,首地址为2000H,且地址是连续的,则可用的最高地址是________。 6..一个数据的有效地址EA = 1234H,且DS =5678H,则该数据在内存中的物理地址是________,该数据段的首单元的物理地址是________,末单元的物理地址是________。
7.若当前堆栈指针SP指向2006H单元,则向堆栈中压入5个字的内容后,SP应指向________。8.若8086 CPU引脚状态是M/IO=1,RD=1,WR=0,则此时执行的操作是________。 二、综合题(80分) 1.(10分) 一个异步串行通信口,通过TXD发送一帧数据的字符格式如图2的实线所示: 图2 如果线路上传送的字符格式包括7位ASCII码数据,一位奇偶校验位,一位停止位。要求:(1) 写出该帧字符所传送的数据值,并说明是奇校验还是偶校验。(2) 如果波特率为600bps,请计算传送上面这一帧数据所需要的时间。(3) 若波特率系数K=16,请计算发送时钟频率TXC的频率值。 2. (10分) 图3为两级译码构成口地址译码电路,PS输出低电平为片选信号。试问 图3 图4 (1) 开关K上合,PS的寻址范围是________。(2) 开关K下合,PS的寻址范围是________。 (3) 开关K下合,A3改接B,A4改接A,则PS的寻址范围是________________。 (4) 请用二进制表示法写出图4的译码电路所决定的端口地址。 3. (20分) 某系统外接电路如图5,8255A口地址为2F0H~2F3H,请设计源程序,一次性 的测试开关的位置,当K闭合时,LED亮,K断开时LED灭(提示:C口高4位应为方式0输入,低4位为方式0输出)。 图5 CODE SEGMENT ASSUME CS:CODE BEG: ;C口初始化