DSP期末上机大作业_2015秋
- 格式:doc
- 大小:152.84 KB
- 文档页数:7
DSP习题答案DSP 技术及应⽤综合训练1.DSP全称有哪两个含义?全称分别是什么?答:1、Digital Signal Processing,数字信号处理,指的是⼀门学科2、Digital Signal Processor,数字信号处理器,实现数字信号处理算法的处理器.平常所说的DSP⼀般指后者。
2.TI公司DSP主要分为哪⼏种⼦列?分别⽤于哪些场合答:C2000、C5000和C6000三⼤主流,其中C2000系列属于控制型,相当于⾼端单⽚机;C5000系列属于低成本、低功耗、⾼效率型;C6000系列属于⾼性能的类型,其性能是C5000系列的数⼗倍。
如果你处理的算法不是很复杂的话,建议使⽤C5000系列(如C5509、C5510等);如果算法之类的特别复杂,可以考虑C6000系列。
3.VC5509A硬件结构主要有哪些组成?答:CPU、存储器、⽚上外设。
(⽚上外设:●两个20位的定时器。
●⼀个看门狗定时器。
●l6通道直接存储器存取控制器(DMA),DMA控制器在不需要CPU⼲预的情况下可以提供6路独⽴的通道⽤于数据传输,并且可达每周期两个16位数据的吞吐量。
l外部存储器接⼝(EMIF),它提供与异步存储器如EPROM、SRAM及⾼密度存储器如同步DRAM的⽆缝连接。
l 三个串⼝⽀持最多三个多通道缓冲串⼝(McBSP)或最多两个多媒体/安全数字卡接⼝。
三个全双⼯多通道缓冲串⼝(McBSP)提供了与各种⼯业级串⾏设备的⽆缝接⼝,其多通道通信最多可以实现128个独⽴通道。
增强型主机接⼝(EHPI)是⼀个16位的并⾏接⼝,主机能够提供HPI接⼝访问5509A上的32KB⽚上存储器。
●可编程锁相环(DPLL)时钟发⽣器。
●USB全速(12Mbps)从端⼝。
●I2C主从接⼝。
●⼀个实时时钟。
)4.在CMD⽂件中,Mermory命令的主要作⽤是什么?答:⽤来指定⽬标存储器结构5.在CMD⽂件中,SECTION命令的主要作⽤是什么?答:⽤来控制段的构成与地址分配6.C55X处理器软件开发流程是什么?答:7.利⽤C语⾔与汇编语⾔混合编程优什么优点?答:可以充分地控制处理器的功能,为⼈⼯映射算法构成最有效的程序编码,效率⾼、可维护性和移植性好。
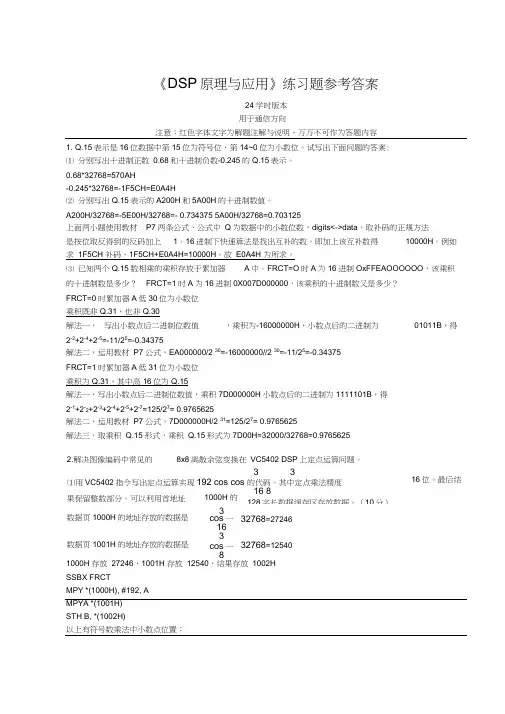
《DSP 原理与应用》练习题参考答案24学时版本 用于通信方向注意:红色字体文字为解题注解与说明,万万不可作为答题内容1. Q.15表示是16位数据中第15位为符号位,第14~0位为小数位。
试写出下面问题的答案: ⑴ 分别写出十进制正数 0.68和十进制负数-0.245的Q.15表示。
0.68*32768=570AH-0.245*32768=-1F5CH=E0A4H⑵ 分别写出Q.15表示的A200H 和5A00H 的十进制数值。
A200H/32768=-5E00H/32768=- 0.734375 5A00H/32768=0.703125上面两小题使用教材 P7两条公式,公式中 Q 为数据中的小数位数,digits<->data 。
取补码的正规方法 是按位取反得到的反码加上1。
16进制下快速算法是找出互补的数,即加上该互补数得10000H 。
例如求 1F5CH 补码,1F5CH+E0A4H=10000H 。
故 E0A4H 为所求。
⑶ 已知两个Q.15数相乘的乘积存放于累加器A 中。
FRCT=O 时A 为16进制OxFFEAOOOOOO ,该乘积的十进制数是多少? FRCT=1时A 为16进制0X007D000000,该乘积的十进制数又是多少? FRCT=0时累加器A 低30位为小数位 乘积既非Q.31,也非Q.30解法一, 写出小数点后二进制位数值 ,乘积为-16000000H ,小数点后的二进制为01011B ,得2-2+2-4+2-5=-11/25=-0.34375解法二,运用教材 P7 公式,EA000000/2 30=-16000000//2 30=-11/25=-0.34375 FRCT=1时累加器A 低31位为小数位 乘积为Q.31,其中高16位为Q.15解法一,写出小数点后二进制位数值,乘积7D000000H 小数点后的二进制为1111101B ,得 2-1+2-2+2-3+2-4+2-5+2-7=125/27= 0.9765625解法二,运用教材 P7 公式,7D000000H/2 31=125/27= 0.9765625解法三,取乘积 Q.15形式,乘积 Q.15形式为7D00H=32000/32768=0.97656251000H 存放 27246,1001H 存放 12540,结果存放 1002H SSBX FRCTMPY *(1000H), #192, A MPYA *(1001H) STH B, *(1002H)以上有符号数乘法中小数点位置:2.解决图像编码中常见的8x8离散余弦变换在 VC5402 DSP 上定点运算问题。
2015年上学期《计算机控制技术》复习提纲=====================================================复习内容一:本学期每章节布置做过的习题复习内容二:如下整理的各题型一、选择题(共20题)1.由于计算机只能接收数字量,所以在模拟量输入时需经()转换。
A.A/D转换器B.双向可控硅C.D/A转换器D.光电隔离器2.若系统欲将一个D/A转换器输出的模拟量参数分配至几个执行机构,需要接入()器件完成控制量的切换工作。
A.锁存器锁存B.多路开关C.A/D转换器转换D.反多路开关3.某控制系统中,希望快速采样,保持器的保持电容CH应取值()。
A.比较小B.比较大C.取零值D.取负值4. 在LED显示系统中,若采用共阳极显示器,则将段选模型送至()。
A.阳极B.阴极C.阴极或阳极D.先送阴极再送阳极5. 电机控制意味着对其转向和转速的控制,微型机控制系统的作法是通过()实现的。
A.改变定子的通电方向和通电占空比B.改变转子的通电方向和通电占空比C.改变定子的通电电压幅值D.改变转子的通电电压幅值6.计算机监督系统(SCC)中,SCC计算机的作用是()A.接收测量值和管理命令并提供给DDC计算机B.按照一定的数学模型计算给定植并提供给DDC计算机C.当DDC计算机出现故障时,SCC计算机也无法工作D.SCC计算机与控制无关7. 键盘锁定技术可以通过()实现。
A.设置标志位B.控制键值锁存器的选通信号C.A和B都行D.定时读键值8. RS-232-C串行总线电气特性规定逻辑“1”的电平是()。
A.0.3 伏以下B.0.7伏以上C.-3伏以下D.+3伏以上9. 在工业过程控制系统中采集的数据常搀杂有干扰信号,()提高信/躁比。
A.只能通过模拟滤波电路B.只能通过数字滤波程序C.可以通过数字滤波程序/模拟滤波电路D.可以通过数字滤波程序和模拟滤波电路10.步进电机常被用于准确定位系统,在下列说法中错误的是()。
深圳大学考试答题纸(以论文、报告等形式考核专用)二○一四~二○一五学年度第 2 学期课程编号1700470001 课程名称计算机控制技术主讲教师评分学号姓名专业年级12测控技术与仪器题目:数字PID控制算法的参数整定PID控制算法具有结构简单、易于实现、不依赖于数学模型、鲁棒性好、适用面广等优点,在工业控制中被广泛采用。
按照计算机控制系统的模拟化设计思想,将模拟PID 控制算法进行离散化处理,得到近似等效的数字PID控制算法,并用计算机加以实现。
请查阅近期文献,总结PID控制器参数整定方法的新发展,要求至少详细说明一种教材中未提及的整定方法,注明文献出处。
1.数字PID 控制算法1.1数字PID 控制算法的含义在计算机控制系统中,按偏差信号的比例、积分和微分进行控制的控制器称为PID 控制器,其控制规律称为PID 控制算法。
PID 控制算法具有结构简单、易于实现、不依赖于数学模型、鲁棒性强、使用面广等优点,在工业工程控制系统中被广泛应用。
PID 控制算法是目前技术最成熟、应用最为普遍的一种控制方法。
按照计算机控制系统的模拟化设计思想,将连续系统的模拟PID 控制算法进行离散化处理,得到近似等效的数字PID 控制算法,并用计算机加以实现,从而使PID 控制算法具有更大的灵活性和适用性。
1.2标准数字PID 控制算法PID 控制器是一种线性控制器,它将给定值与实际输出值的偏差 的比例、积分和微分进行线性组合,形成控制量 输出,如图3-1所示。
图3-1 PID 控制器方框图 因此,连续系统中PID 控制器的传递函数为(1-1)PID 控制规律为(1-2) 其中, 为比例系数, 为积分时间常数, 为微分时间常数, 为PID 控制器的输入, 为PID 控制器的输出。
由式(1-1)和式(1-2)可知,PID 控制器的输出是由比例控制、积分控制和微分控制三项组成,三项在控制器中所起的控制作用相互独立。
因此,在实际应用中,根据被控对象的特性和控制要求,可以选择其结构,形成不同形式的控制器,如比例(P )控制器,比例积分(PI )控制器,比例微分(PD )控制器等。
dsp试卷及答案dsp试卷及答案【篇一:dsp试题及答案1】xt>__________班姓名 ___________学号_______________(请考生注意:本试卷共 5 页,8道大题)tms320c54x系列,所有答案均以54系列为主,特此声明)一、单项选择题: (每小题2分,总计20分)1、以下各项哪项不属于dsp芯片的主要特点答:( b )(a)哈佛结构(b)事务型处理器(c)指令系统的流水线操作(d)多总线结构2、哈佛结构与冯.诺依曼结构的区别在于答:( a )(a)不止一条数据总线(b)多个存储器(c)允许流水线操作(d)专用的硬件乘法器3、tms320c54x的中央处理器由以下哪项组成答:( a )(a)运算部件和控制部件(b)算术逻辑单元和累加器(c)累加器和乘法器(d)st1和sto4、以下各项哪项不属于选择dsp 芯片时考虑的因素答:(d )(a)运算速度(b)精度和动态范围(c)价格(d)外观6、若使cpl=1,dp=1,sp=0100h,执行直接寻址语句:add 30h,a 后,则得到16位的数据存储器实际地址为:答:(b )(a)00b0h (b)0130h(c)0031h(d)0030h7、双数据存储器操作数间接寻址所用辅助寄存器只能是以下哪项答:( c )(a)ar0 ar1 ar2 ar3(b)ar1 ar2 ar3 ar4 (c)ar2 ar3 ar4 ar5 (d)ar0 ar1 ar6 ar78、以下段定义伪指令中哪个属于未初始化段:答:( c )(a).text (b).data (c).usect (d).sect9、dsp中c语言设计具有兼容性和可移植的优点, c代码的程序入口地址符号为答:( a )(A)_c_int00 (b)start(c)reset (d)_c_int10、在ccs中编译c程序时,必须将运行时间支持库文件添加到工程中,该文件名为:答:(b)(A)rts.src (B)rts.lib (C)rtdx.lib (d)rtdx.h二、填空题:(总计15分)1.dsp应用系统的设计流程包括4个步骤:算法模拟阶段、____2.ti的三大主力dsp3. 对54系列dsp来说,一般地,有192k字可寻址存储空间,其中包括:4.用重复指令将程序存储区从地址单元0100h到0180h区间段的内容复制到数据存储区间从1000h开始的地址单元中。
自动控制原理大作业要求与题目(1)人工设计利用半对数坐标纸手工绘制系统校正前后及校正装置的Bode图,并确定出校正装置的传递函数。
验算校正后系统是否满足性能指标要求。
(2)计算机辅助设计利用MATLAB语言对系统进行辅助设计、仿真和调试。
(3)确定校正装置的电路形式及其参数。
(4)撰写设计报告。
具体内容包括如下五个部分。
1)设计任务书2)设计过程人工设计过程包括计算数据、系统校正前后及校正装置的Bode 图(在半对数坐标纸上)、校正装置传递函数、性能指标验算数据。
计算机辅助设计过程包括Simulink仿真框图、Bode图、阶跃响应曲线、性能指标要求的其他曲线。
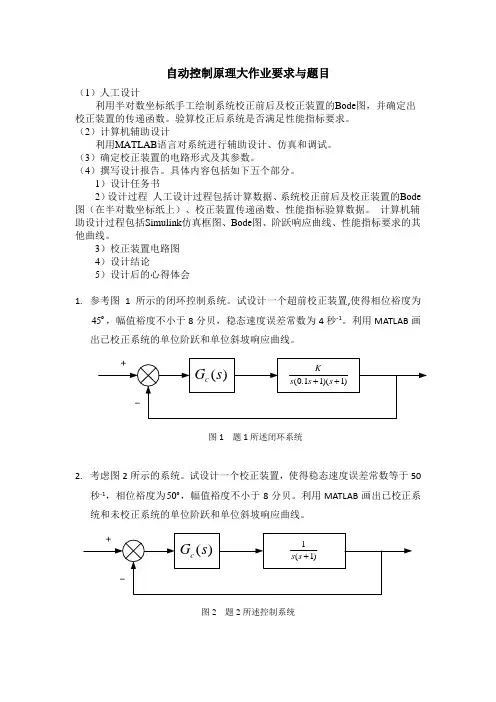
3)校正装置电路图4)设计结论5)设计后的心得体会1.参考图1所示的闭环控制系统。
试设计一个超前校正装置,使得相位裕度为45 ,幅值裕度不小于8分贝,稳态速度误差常数为4秒-1。
利用MATLAB画出已校正系统的单位阶跃和单位斜坡响应曲线。
图1 题1所述闭环系统2.考虑图2所示的系统。
试设计一个校正装置,使得稳态速度误差常数等于50秒-1,相位裕度为50 ,幅值裕度不小于8分贝。
利用MATLAB画出已校正系统和未校正系统的单位阶跃和单位斜坡响应曲线。
图2 题2所述控制系统3. 考虑图3所示的卫星姿态控制系统。
试设计一个校正装置,使得相位裕度为45 ,幅值裕度大于或等于6分贝。
利用MATLAB 画出已校正系统的单位阶跃和单位斜坡响应曲线。
图3 题3所述控制系统4. 考虑图4所示的系统。
要求设计一个校正装置,使得稳态速度误差常数为4秒-1,相位裕度为50 ,幅值裕度大于或等于8分贝。
利用MATLAB 画出已校正系统的单位阶跃和单位斜坡响应曲线。
图4 题4所述控制系统5. 参考图5所示的系统。
试设计一个滞后-超前校正装置,使得稳态速度误差常数为20秒-1,相位裕度为60 ,幅值裕度不小于8分贝。
利用MATLAB 画出已校正系统的单位阶跃和单位斜坡响应曲线。
第一章1.简述典型实时数字信号处理系统组成部分。
答:包括:抗混叠滤波器(Anti-aliasing filter)、模数转换器ADC(Analog-to-Digital Converter)、数字信号处理、数模转换器DAC(Digital-to-Analog Converter)和抗镜像滤波器(Anti-image filter) 。
2.简述X86处理器完成实时数字信号处理的优缺点。
答:利用X86处理器完成实时数字信号处理。
特点是处理器选择范围宽,主板及外设资源丰富,有多种操作系统可供选择,开发、调试较为方便;缺点是数字信号处理能力不强,硬件组成较为复杂,系统体积、重量较大,功耗较高,抗环境影响能力较弱。
3.简述数字信号处理器的主要特点。
答:(1)存储器采用哈佛或者改进的哈佛结构;(2)内部采用了多级流水;(3)具有硬件乘法累加单元;(4)可以实现零开销循环;(5)采用了特殊的寻址方式;(6)高效的特殊指令;(7)具有丰富的片内外设。
4.给出存储器的两种主要结构,并分析其区别。
答:存储器结构分为两大类:冯·诺依曼结构和哈佛结构。
冯·诺依曼结构的特点是只有一个存储器空间、一套地址总线和一套数据总线;指令、数据都存放在这个存储器空间中,统一分配地址,所以处理器必须分时访问程序和数据空间。
哈佛结构程序存储器空间和数据存储器空间分开,具有多套地址、数据总线,哈佛结构是并行体系结构,程序和数据存于不同的存储器空间,每个存储器空间独立编址、独立访问。
5.简述选择数字信号处理器所需要考虑的因素。
答:应考虑运算速度、算法格式和数据宽度、存储器类型、功耗和开发工具。
6.给出数字信号处理器的运算速度指标,并给出其具体含义。
答:常见的运算速度指标有如下几种:(1)指令周期:执行一条指令所需的最短时间,数值等于主频的倒数;指令周期通常以ns(纳秒)为单位。
例如,运行在200MHz的TMS320VC5510的指令周期为5ns。
DSP原理与应用学号::日期:2017年5月23日星期二1.DSP的生产厂商主要有哪些?分别有什么系列?答:①仪器公司(最有名的DSP芯片厂商)。
TI公司在市场上主要的三个系列产品:(1)面向数字控制、运动控制的TMS320C2000系列,主要包括TMS320C24x/F24x、TMS320LC240x/LF240x、TMS320C24xA/LF240xA、TMS320C28##等;(2)面向低功耗、手持设备、无线终端应用的TMS320C5000系列,主要包括TMS320C54x、TMS320C54##、TMS320C55x等;(3)面向高性能、多功能、复杂应用领域的TMS320C6000系列,主要包括TMS320C62##、TMS320C64##、TMS320C67##等。
②美国模拟器件公司。
其主要的系列:(1)定点DSP芯片有ADSP2101/2103/2105、ADSP2111/2115、ADSP2126/2162/2164、ADSP2127/2181、ADSP-BF532以与Blackfin系列;(2)浮点DSP芯片有ADSP21000/21020、ADSP21060/21062,以与虎鲨TS101、TS201S。
③Motorola公司(发布较晚)。
其主要的系列包括:(1)定点DSP 处理器MC56001;(2)与IEEE浮点格式兼容的的浮点DSP芯片MC96002;(3)DSP53611、16位DSP56800、24位的DSP563##和MSC8101等产品。
④杰尔公司。
主要系列有:嵌入式DSP核的SC1000和SC2000系列,主要面向电信基础设施、移动通信、多媒体服务器与其它新兴应用。
2.浮点DSP和定点DSP各自有什么特点?答:浮点DSP和定点DSP在宏观上有很大的特点区别,包括动态围、速度、价格等等。
(1)动态围:定点DSP的字长每增加1bit,动态围扩大6dB。
16bit字长的动态围为96dB。
电子科技大学《DSP技术》20春期末考试
TMS320C54x系列DSP采用低功耗配置,芯片核电压( )伏。
A:0.5
B:1
C:1.8
D:2.2
参考选项:C
只读存储器为( )。
A:RDM
B:RRM
C:RAM
D:ROM
参考选项:D
.mmregs DAT0 .SET 60H DAT1 .SET 61H DAT2 .SET 62H DAT3 .SET 63H add3 .macro P1,P2,P3,ADDRP LD P1,A ADD P2,A ADD P3,A STL A,ADDRP .endm ST #0034h,DAT0 ST #0243h,DAT1 ST #1230h,DAT2 ADD3
DAT0,DAT1,DAT2,DAT3 语句“ADD3 DAT0,DAT1,DAT2,DAT3”作用是( )。
A:执行三个数相乘
B:执行三个数相减
C:执行三个数相除
D:执行三个数相加
参考选项:D
对于定点数( )。
A:Q越大,数值范围越大,精度越高
B:Q越大,数值范围越小,精度越高
C:Q越大,数值范围越小,精度越低
D:Q越大,数值范围越大,精度越低。
参考选项:B
设累加器B=00 4321 1234H,执行指令“STL B,x”后,数据存储单元x中
的结果为( )。
A:0043H
B:4321H
C:1234H
D:3400H
参考选项:C
DSP技术 (Digital Signal Process)是利用专用或通用数字信号处理芯片,通过( )方法对信号进行处理。
1。
数控大作业作业一调研报告——数控系统的国内外发展及应用现状一、目的数控系统是数字控制系统简称,英文名称为Numerical Control System,是数控机床的关键技术所在。
早期是由硬件电路构成的称为硬件数控(Hard NC),1970年代以后,硬件电路元件逐步由专用的计算机代替称为计算机数控系统。
计算机数控(Computerized numerical control,简称CNC)系统是用计算机控制加工功能,实现数值控制的系统。
CNC系统是根据计算机存储器中存储的控制程序,执行部分或全部数值控制功能,并配有接口电路和伺服驱动装置的专用计算机系统。
CNC系统由数控程序输入装置、输出装置、计算机数控装置(CNC装置)、可编程逻辑控制器(PLC)、主轴驱动装置和进给(伺服)驱动装置(包括检测装置)等组成。
CNC系统的核心是CNC装置。
请以课堂所学习的知识为基础,对数控系统的国内外发展及应用现状进行调研,并提交调研报告。
二.工作量与要求1. 首先针对数控系统的国内外发展、研究和应用现状进行概述;2. 其次针对计算机数控装置(CNC装置)、主轴驱动装置或进给(伺服)驱动装置(包括检测装置)中的某一内容进行重点论述;3. 报告要求图文并茂、逻辑清楚,要求标注参考文献,最近5年参考文献不得少于5篇。
作业格式请参照本科生毕业论文要求,总字数不少于3000字,手工签名。
4. 每位同学独立完成,若发现雷同作业,均视为0分。
作业二:零件加工编程一、目的和要求1. 利用所学习的数控编程相关知识,手工编写零件数控加工程序。
2. 要求每位同学做车削和铣削加工零件各一个。
车削要求一次精车,铣削要求加工工件外轮廓。
3. 要求手工书写,并注释每个程序段。
二、加工零件图图1 工件一(车削)图2 工件二(车削)图3 工件三(车削)图4 工件四(铣削)图5 工件五(铣削)图6工件六(铣削)作业三:典型曲线数字积分法插补方法一、目的数字积分插补方法是实现数控插补功能的重要方法之一。
20春《DSP技术》在线作业1
试卷总分:100 得分:100
一、单选题 (共 20 道试题,共 100 分)
1.()就是将输入的信号序列按规定的算法处理之后得到所希望的输出序列的过程。
A.数字滤波
B.滤波器
C.DC
D.模拟滤波器
答案:A
2.模拟信号采集的过程是将模拟信号转换成( )。
A.离散信号
B.数字信号
C.混合信号
D.采样信号
答案:B
3.TMS320C54X DSP中有( )个辅助寄存器。
A.4
B.8
C.16
D.32
答案:B
4.在状态位寄存器ST1中,选用堆栈指针(SP)的直接寻址方式时( )。
A.CPL=0
B.CPL=1
C.CMPT=0
D.CMPT=1
答案:B
5.一个自适应滤波器实现的复杂性,通常用它所需的( )来衡量。
A.加法次数和阶数
B.乘法阶数
C.乘法次数
D.乘法次数和阶数
答案:D
6.()实际上是在标准串口的基础上增加了一个缓冲区。
A.多通道
B.缓冲并口
C.缓冲串口
D.控制寄存器。
第1题 (2.0) 分图示电路为()电路A、甲乙类OCLB、甲乙类OTLC、乙类OCLD、甲类第2题 (2.0) 分在放大电路的耦合方式中,()低频特性最好。
A、变压器耦合B、直接耦合C、阻容耦合D、光电耦合第3题 (2.0) 分当PN结外加反向电压时,扩散电流()漂移电流,耗尽层变宽。
A、大于B、小于C、等于D、不确定第4题 (2.0) 分在本征半导体中掺入3价元素就成为()型半导体。
A、P型半导体B、N型半导体C、PN结D、纯净半导体第5题 (2.0) 分测得某放大电路正常工作的晶体管三电极直流电位分别为12.2V、12V、0V, 则三极管的三个电极分别是()。
A、(E、B、C)B、(C、B、E)C、(B、C、E)D、(B、E、C)第6题 (2.0) 分PNP型晶体管工作在放大区时,三个电极直流电位关系为()A、UC< UE< UBB、UB< UC< UEC、UC< UB< UED、UB< UE< UC第7题 (2.0) 分当PN结外加反向电压时,内外电场方向()。
A、相反B、相同C、不确定第8题 (2.0) 分欲将方波转换成三角波,应选用()。
A、微分运算电路B、积分运算电路C、差分输入运算电路D、乘法电路第9题 (2.0) 分负反馈使放大电路增益下降,非线性失真( )。
A、增大B、减小C、不变D、不确定第10题 (2.0) 分在桥式整流电路中,若整流桥中有一个二极管开路,则输出()A、输出电压只有半周波形B、输出电压仍为全波波形C、输出电压无波形,且变压器或整流管可能烧坏D、对电路无实质性影响第11题 (2.0) 分在开关型稳压电路中,调整管工作在()状态。
A、放大B、饱和C、截止D、开关第12题 (2.0) 分OTL功率放大电路如图示,D1、D2的作用是()。
A、充当T3的集电极负载B、消除交越失真C、增大输出功率D、减少三极管的穿透电流第13题 (2.0) 分测某放大电路中三极管各极电位分别是0 V、-6V、0.2V,则三极管的三个电极分别是()。
生医《数字信号处理》期末大作业
2015/11/18
一、设计FIR带阻滤波器
(一)、试验数据的产生
分别产生两个高斯分布、零均值的白噪声数据1un和2un,其功率都为
2
0.1u
,让1un和2un分别通过一个FIR系统,可得到输出1vn和2vn,令
12
()vnvnjvn
在()vn上再加上四个复正弦信号,幅度分别为12346,12,12,2aaaa,归一化频率
分别是''''12340.12,0.23,0.24,0.16,ffff这样可得到已知的试验信号nx。该FIR
系统由5个FIR子系统级联而成:
1
2
3
4
5
[1,1.98,0.9801][1,1.98,0.9801][1,1.8418,0.9801][1,1.5,0.9801][1,1.2727,0.9801]bbbbb
1. 画出该FIR系统的归一化对数幅频响应,离散谱的分点数4096N;
(归一化是指所有的数据被最大值去除,因此最大值处为零dB)
2.写出得到nx的计算过程。令所得到的数据长度256N,描绘该波形(实部和虚
部),并存储之;
答:分析题意可将解题步骤分为以下几步:
第一步:用randn()函数产生均值为零,功率为0.1(即方差为0.1)的高斯分布的白噪声)(1nu,
)(2nu
clear;
u0=randn(1,500000);%调用randn,得到均匀分布的伪随机数u0(n);
u0=u0*sqrt(0.1); %sqrt(p)是伸缩系数;
power_u0=var(u0); %求u0的方差;
subplot(2,1,1); %将当前绘图窗口分为2行1列,绘制第1副子图;
plot(u0(1:200)); %画连续曲线,采用u0(1)到u(200)这200个点;
grid on; %给绘图窗口加网格;
xlabel('n'); %定义x轴坐标为n;
ylabel('x(n)'); %定义y轴坐标为x(n);
u1=randn(1,500000);
u1=u1*sqrt(0.1);
power_u1=var(u1);
subplot(2,1,2);
plot(u1(1:200));
grid on;
xlabel('n');
ylabel('x(n)');
020406080100120140160180200
-1
-0.5
0
0.5
1
n
x
(
n
)
020406080100120140160180200
-1
-0.5
0
0.5
1
n
x
(
n
)
图 1两个高斯分布的白噪声
第二步:)(1nu和)(2nu通过由5个FIR子系统(54321,,,,bbbbb)级联而成的FIR
系统,得到输出)(),(21nvnv,令)()()(21njvnvnv,在)(nv上加四个已知幅度
(4321,,,aaaa)和归一化频率(4'3'2'1',,,ffff)的复正弦信号,得到已知的试验
信号)(nx。
分析可得:由已知的5个FIR子系统的54321,,,,bbbbb,可知系统的
)(),(),(),(),(54321nhnhnhnhnh
,从而得到总的FIR系统的系统函数
)(*)(*)(*)(*)()(54321zHzHzHzHzHzH
, 最终的试验信号
)(nx
)()()()()()(654321nvnvnvnvnvnv
,求幅频响应则调用freqz()函数。
clear;
clf; %清除当前绘图窗口的图形;
b1=[1,1.98,0.9801]; %FIR子系统b1;
b2=[1,-1.98,0.9801];%FIR子系统b2;
h1=conv(b1,b2); %因b1,b2系统级联,求b1与b2的卷积;
b3=[1,-1.8418,0.9801];
h2=conv(h1,b3);
b4=[1,-1.5,0.9801];
h3=conv(h2,b4);
b5=[1,-1.2727,0.9801];
h=conv(h3,b5);
[H,w]=freqz(h,1,4096,'whole',1);
%求系统的频率响应,w是返回频率轴坐标向量;
%频率轴的分点数N=4096,'whole'指定计算的频率范围是从0到
Fs=1;
%Fs是抽样频率,Fs=1,频率轴给出归一化频率;
H=abs(H); %求幅频响应;
H1=max(H); %取H1为幅频响应最大值;
H=H/H1; %归一化是指所有的数据被最大值去除;
H=20*log10(H); %FIR系统的归一化对数幅频响应;
plot(w,H); %画连续曲线
ylabel('系统的归一化对数幅频响应');
grid on;
00.10.20.30.40.50.60.70.80.91
-140
-120
-100
-80
-60
-40
-20
0
系
统
的
归
一
化
对
数
幅
频
响
应
图2
第三步:写出得到nx的计算过程。令所得到的数据长度256N,描绘该波形(实部和
虚部),并存储之;
N=256;
u1=randn(1,500000);
u1=u1*sqrt(0.1);
u2=randn(1,500000);
u2=u2*sqrt(0.1);
n=[0:N-1];
a1=6;a2=12;a3=12;a4=2;
f1=0.12;f2=0.23;f3=0.24;f4=0.16;
b1=[1,1.98,0.9801];
b2=[1,-1.98,0.9801];
b3=[1,-1.8418,0.9801];
b4=[1,-1.5,0.9801];
b5=[1,-1.2727,0.9801];
h1=conv(b1,b2);h2=conv(h1,b3);h3=conv(h2,b4);h=conv(h3,b5);
v1=conv(u1,h); v2=conv(u2,h);
v=v1+i*v2;
x1=v1(1:N)+a1*cos(2*pi*f1*n)+a2*cos(2*pi*f2*n)+a3*cos(2*pi*
f3*n)+a4*cos(2*pi*f4*n);
x2=v2(1:N)+a1*sin(2*pi*f1*n)+a2*sin(2*pi*f2*n)+a3*sin(2*pi*
f3*n)+a4*sin(2*pi*f4*n);
x=x1+i*x2;
subplot(221);
stem(x1,'.');
grid on;
xlabel('N');
ylabel('x(n)的实部');
subplot(222);
stem(x2,'.');
grid on;
xlabel('N');
ylabel('x(n)的虚部');
subplot(223);
stem(x,'.')
xlabel('N');
ylabel('x(n)');
0100200300-40-2002040Nx(n)的实部0100200300
-40
-20
0
20
40
N
x
(
n
)
的
虚
部
0100200300
-40
-20
0
20
40
N
x
(
n
)
(二) 设计FIR带阻滤波器
设计一FIR带阻滤波器,滤去nx在1f处的正弦,分别使用窗函数法和Chebyshev一
致逼近法设计滤波器。通带衰减约为0.1dB,阻带衰减约为-30dB,带边频率自己指定。
1.试确定该滤波器的阶次
2. 给出该滤波器的幅频响应及nh;
二、设计一多通带线性相位FIR滤波器(见书P319 习题7.7)
试用切比雪夫等纹波逼近法设计一多通带线性相位FIR滤波器。对归一化频率,0.1~0.15
及 0.3~0.36为通带,其余为阻带,阻带边缘频率分别为0.05, 0.18, 0.25, 0.41。
首先画出该理想滤波器幅频响应的图形jdeH。再令滤波器长度为55,请分别给定
通带和阻带的加权值(三组wtx值),研究不同加权值对滤波器性能的影响,要求输出滤波
器抽样响应、幅频及相频响应
要求:
1 写出较为详细的报告,对实现步骤、所得结果等作较为深入的分析;
2 提交电子文档和程序。电子版作业提交给课代表,之后通过email发到
我的QQ邮箱,要求每位同学写明:题目、班级、姓名、学号。