
!
1-4 前馈调节系统和反馈调节系统有哪些本质上的区别
答:反馈调节系统是依据于偏差进行调节的,由于反馈回路的存在,形成一个闭合的环路,所以也称为闭环调节系统。其特点是:(1)在调节结束时,可以使被调量等于或接近于给定值;(2)当调节系统受到扰动作用时,必须等到被调量出现偏差后才开始调节,所以调节的速度相对比较缓慢。
而前馈调节系统是依据于扰动进行调节的,前馈调节系统由于无闭合环路存在,亦称为开环调节系统。其特点是:(1)由于扰动影响被调量的同时,调节器的调节作用已产生,所以调节速度相对比较快;
(2)由于没有被调量的反馈,所以调节结束时不能保证被调量等于给定值。
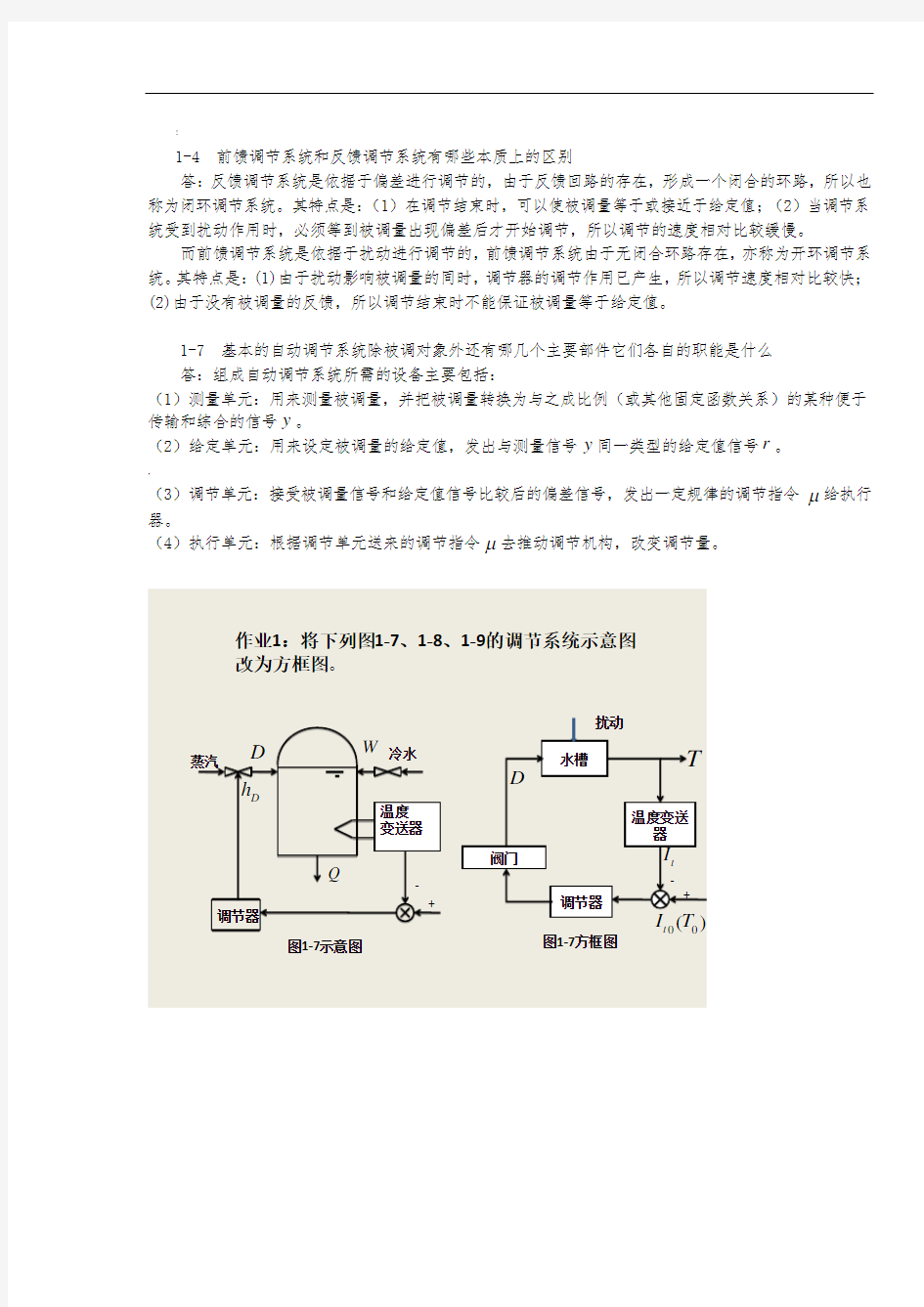
1-7 基本的自动调节系统除被调对象外还有哪几个主要部件它们各自的职能是什么
答:组成自动调节系统所需的设备主要包括:
(1)测量单元:用来测量被调量,并把被调量转换为与之成比例(或其他固定函数关系)的某种便于传输和综合的信号y。
(2)给定单元:用来设定被调量的给定值,发出与测量信号y同一类型的给定值信号r。
,
(3)调节单元:接受被调量信号和给定值信号比较后的偏差信号,发出一定规律的调节指令μ给执行器。
(4)执行单元:根据调节单元送来的调节指令μ去推动调节机构,改变调节量。
or
!{¥
^
~
2—8 答案
第三章
3-1 什么是有自平衡能力对象和无自平衡能力对象?
答案: 所谓有自平衡能力对象,就是指对象在阶跃扰动作用下,不需要经过外加调节作用,对象的输出量经过一段时间后能自己稳定在一个新的平衡状态。所谓无自平衡能力对象,就是指对象在阶跃扰动作用下,若没有外加调节作用,对象的输出量经过一段时间后不能自己稳定在一个新的平衡状态。
3-2 试分析P、PI、PID规律对系统调节质量的影响?
答案:P调节器,有一个相对较大的超调量,有较长的调节时间,存在静态误差。
PI调节器,综合了P调节器和I调节器两者的性质。它的超调量及调节时间与P调节器差不多,但没有静态误差。
PID调节器兼有比例、积分和微分作用的特点,只要三个调节作用配合得当就可以得到比较好的调节效果,它具有比PD调节还要小的超调量,积分作用消除了静态误差,但由于积分作用的引入,调节时间比PD调节器要长。
3-3 在相同衰减率的前提下,为什么采用PI规律的比例带δ要采用P规律时选择得大一些?
答案:PI调节器兼有比例调节作用和积分调节作用的特点,由于积分调节作用是随时间而逐渐增强的,与比例调节作用相比较过于迟缓,在改善静态品质的同时却恶化了动态品质,使过渡过程的振荡加剧,甚至造成系统不稳定。为保证相同衰减率,要通过增大比例带值来削弱振荡倾向。
3-4 怎样判别调节对象被控制的难易程度?
答案:不论调节对象有无自平衡能力,都可统一用ε、ρ、τ三个特征参数来表示对象的动态特性。调节对象惯性越大、迟延越大越难被控制 3-6 为何积分调节器称为无差调节器?
答案:具有积分作用的调节器,只要对象的被调量不等于给定值,执行器就会不停地动作,只有当偏差等于零时,调节过程才结束;调节过程结束,则必然没有偏差,这是积分作用的特点。因此,积分作用调节器也称为无差调节器。
第四章习题
4-1 调节系统如图4-13所示,试分别求当K =10和K =20时,系统的阻尼比 、无阻尼自然振荡频率
n 、单位阶跃响应的超调量M p 、峰值时间t p 、衰减率
、调节时间t s 和稳态误差e (),并讨论K 的大小对过渡过程性能指标的影响。
.
解:系统的闭环传递函数为
2
()10()()1010C s K
G s R s S S K
=
=++
二阶系统传递函数的通用形式为
'22
2
()2n
n n
K G s S S ω
ζωω=++
二式比较,可得, K ’=1
10n K ω= 510K
ζ=
K =10时,10010n ω==
5
1000.5ζ==
由此可以求得:
阻尼振荡频率22
110.5538.66(/)d n
rad s ωωζ=-=-== ¥
峰值时间 0.363()8.66
p
d t s ππ
ω===
超调量
0.57716.3%p M e
e
πζπ
--=== 衰减率
2 1.1541197.3%e
e
πζπ
ψ--=-=-=
调节时间
采用2%的误差带 : 4
4
0.8()5
s
n t s ζω≈==
采用5%的误差带 : 3
3
0.6()5
s
n t s ζω===
稳态误差
0'22
2
0()1()
1()
lim 1
1[()]
lim 1lim 21'0
S S n
S n n e c SC s S G s S
K S S K ωζωω→→→∞=-∞=-=-?=-++=-=
$
K =20
时,n ω==
ζ==
阻尼振荡频率
13.23(/)d n
rad s ωω=== 峰值时间 0.237()13.23
p
d t s ππ
ω===
超调量
/0.25839.3%p M e
e
πζπ
--===
衰减率
2
2/10.5161180.4%e
e
πζζ
π
ψ---=-=-=
调节时间
采用2%的误差带 : 4
4
0.8()5
s
n t s ζω≈==
采用5%的误差带 : 3
3
0.6()5
s n t s ζω===
*
稳态误差
()1'0
e K ∞=-=
4-2 调节系统如图4-14所示,试分别求出当系统的瞬态响应为=和=时的 值。
解:由系统方框图可写出闭环特征方程式:
1
1
105(110)
S S δ+=+
整理得:2
1101050S S δ
++= 考虑到二阶系统的标准形式为:022
2
=++n
n S S ωξω
可见:150n ωδ=
120n
ξω= 当取ψ=时,阻尼比ξ=,据此可求得:
,
22
180.37350δζω
=
==
当取ψ=时,阻尼比ξ=,据此可求得:
2
2
180.94750δζω
===
4-3 试用劳斯判据和古尔维茨判据确定下列特征方程式的系统的稳定性。如果不稳定,指出在S 右半平面根的个数。
(1)05161882
3
4
=++++S S S S (2)053232
3
4
5
=+++++S S S S S
(3)02510323
4=++++S S S
S (4)01681023=+++S S S
答案: (1) 劳斯阵列: .
4321011858
1616
5
13.55
S S S S S
第一列元素全为正,所以系统稳定。 (2) 劳斯阵列:
54
3
2
10133125
124
5
3.255
S S S S
S S --
第一列元素符号改变两次,所以系统不稳定,有2个根在S 右半平面。 (3)劳斯阵列:
4
3
210
35210147210153
472
S S S S S
- "
第一列元素符号改变两次,所以系统不稳定,有2个根在S 右半平面。 (4) 劳斯阵列:
321
0181016
6.416
S S S S
第一列元素全为正,所以系统稳定。
4-4 已知系统特征方程式如下,试求系统在S 右半平面的根数。 (1)0482*******
3
4
5
=+++++S S S S S (2)025********
3
4
5
=+++++S S S S S (3)010874442
3
4
5
6
=+--+-+S S S S S S
"
答案: (1) 劳斯阵列:
5 4 3 2 1
11232 32448 416 1248
00
S
S
S
S
S
由于出现全零行,故用2
S行系数构成辅助多项式。
2
f(s)=12S+48f'(s)=24S
5 4 3 2 1 0
11232 32448 416 1248 240
48
S
S
S
S
S
S
第一列元素全为正,说明特征方程式没有正根,而由辅助方程式,
2
12S+48=0
S=j2和S=-j2
\
这就是系统特征方程式的两对虚根,因此系统边界稳定。
(2) 劳斯阵列:
5 4 3 2 1
11235 32025 1638030 525
00
S
S
S
S
S
由于出现全零行,故用2
S行系数构成辅助多项式
2
f(s)=5S+25f'(s)=10S
5432
10112353
20
251638030
52510
25
S S S S S S
第一列元素全为正,说明特征方程式没有正根,而由辅助方程式 25S +25=0
?
这就是系统特征方程式的两对虚根,因此系统边界稳定。
4-5 调节系统如图所示,G1(s)=K,G2(s)=1/s+1)+1)
习题4-5图
(1) 确定系统稳定时的K 值范围;
(2) @ (3) 如果要求闭环系统的根全部位于1-=S 垂线之左,K 值范围应取多大
答案: (1)系统特征方程 11()2()10(0.11)(0.21)
K
G s G s s s s +=+
=++,即 (10)(5)500s s s K +++= 3
2
1550500s s s K +++= 劳斯阵列:
3
2
1
15015
501050350S K
S K
S S
K
-
系统稳定,则需第一列元素全为正,10500,5003
K
K -
>>所以015K <<。 (2) 用11-=s s 代入特征方程中,可得
、