目录
0.前言 (1)
0.1 结构振动控制研究与应用概况 (1)
1.结构振动主动控制、半主动控制 (2)
2.结构振动控制分类 (3)
3.各类控制系统构造及性能 (4)
3.1 结构振动主动控制概述 (4)
3.1.1 主动控制控制原理 (5)
3.1.2 加力方式及加力位置 (7)
3.1.3 控制装置 (8)
3.2 结构振动半主动控制概述 (8)
4.结构振动主动控制、半主动控制算法 (11)
4.1 主动控制算法 (12)
4.1.2 几种算法的简单介绍 (13)
4.2 半主动控制算法 (21)
4.3 智能控制算法 (22)
5.结构主动、半主动控制系统分析方法及设计方法 (24)
5.1 主动控制系统的最优控制力设计与分析 (25)
5.1.1 主动控制系统的最优控制力设计 (25)
5.1.2 主动最优控制力和受控反应特征分析 (26)
5.2 结构主动变阻尼和智能阻尼控制系统的最优控制力设计与分析 (30)
5.2.1半主动最优控制力设计 (31)
5.2.2系统反应分析 (36)
5.3 结构主动变刚度控制系统的最优控制力设计与分析 (37)
5.3.1主动变刚度最优控制力设计 (37)
5.3.2系统反应分析 (40)
6.结构振动主动控制、半主动控制系统的工程应用 (41)
6.1 AMD控制系统的工程应用 (41)
6.2 结构主动变刚度控制系统的工程应用 (41)
6.3 结构主动变阻尼控制系统的工程应用 (42)
6.4 其他结构振动控制系统的工程应用 (42)
7.研究展望 (43)
7.1 结构振动主动控制、半主动控制的研究与发展方向 (43)
7.2 结构振动控制的有待研究的问题 (43)
8.结语 (43)
参考文献 (44)
主动控制、半主动控制综述
0.前言
0.1 结构振动控制研究与应用概况
结构振动控制技术与传统的依靠结构自身强度、刚度和延性来抵抗地震作用的做法不同,通过在结构中安装各种控制装置,从而达到减小结构地震反应、保障结构地震安全的目的。土木工程结构振动控制的研究和应用已有30余年的历史,其研究和应用大体上分为三个领域:基础隔震、被动耗能减振以及主动、半主动和智能控制。
20世纪70年代初,美国Kelly提出在结构中设置非结构构件的耗能元件——金属软钢屈服耗能器,包括扭转梁、弯曲梁和U形钢器件等,分担和耗散本来由结构构件耗散的能量。20世纪50年代期间,日本Kobori提出了结构变刚度的减振概念。1972年,美国Yao结合现代控制理论,提出了土木工程结构振动控制的概念,开创了结构振动的主动控制研究新的里程。由于直接将能量转变为控制力的主动控制在土木工程中的应用遇到了很大的困难——需要很大的能量转变为控制力,人们不得不转向主动变刚度和变阻尼等机械调节式半主动控制装置。近年来,电/磁流变液体、压电材料、电/磁致伸缩材料和形状记忆材料等智能驱动材料的发展为土木工程结构的振动控制开辟了新的天地。采用智能驱动材料可以制作电(磁)或温度等调节的被动阻尼减振装置、主动控制的驱动装置和半主动控制的变阻尼装置,而且出力大、能耗小、反应迅速,将成为结构振动控制新一代的高性能减振驱动装置或变阻尼装置。例如,美国Load公司已经研制出能耗22W、最大出力达200kN的磁流变液阻尼器。这种装置固定磁场强度可以用作被动耗能减振的阻尼器,调节磁场强度可以用作半主动控制的变阻尼装置。
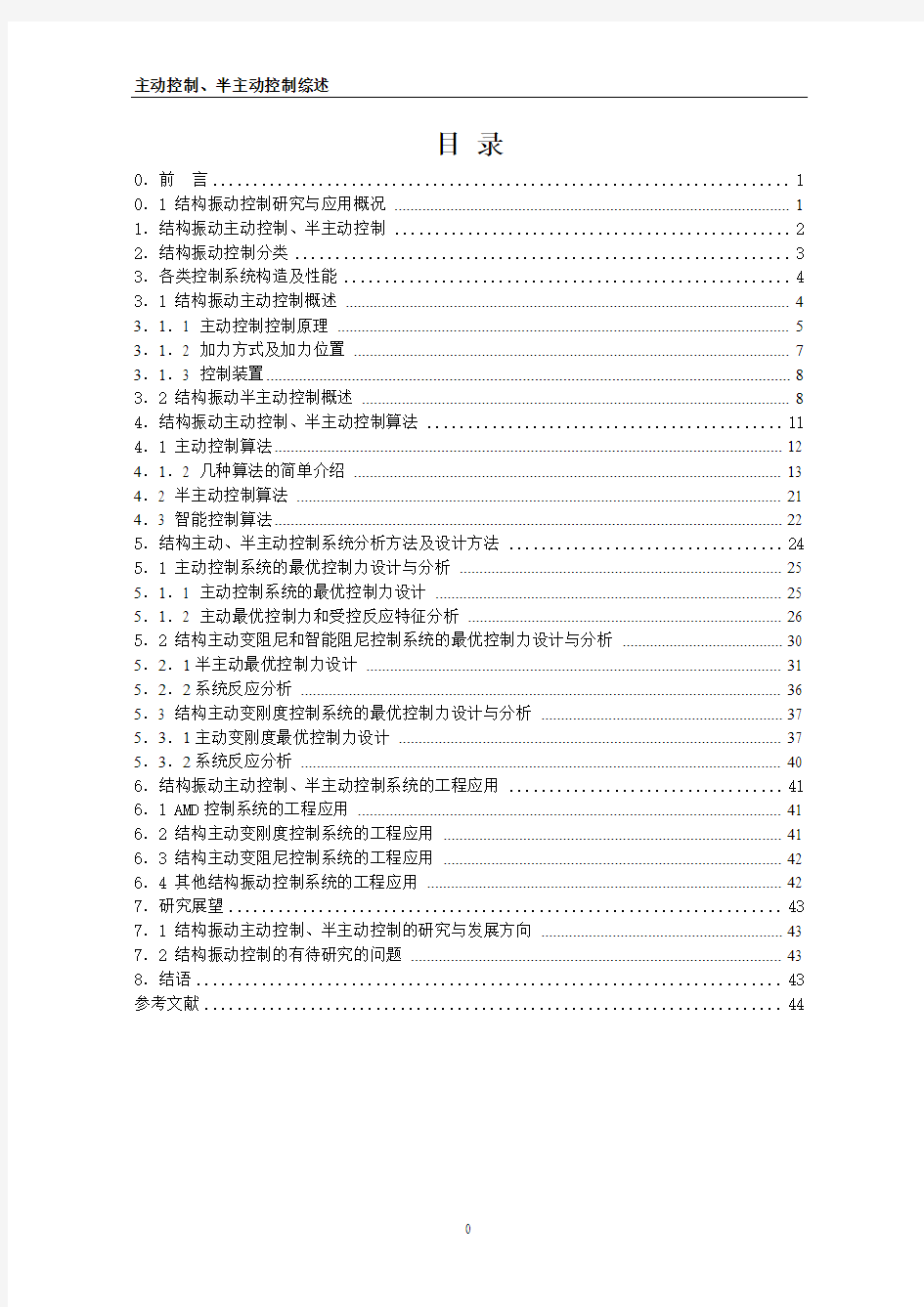
结构主动控制需要实时Array测量结构反应或环境干扰,采
用现代控制理论的主动控制
算法在精确的结构模型基础
上运算和决策最优控制力,最
后作动器在很大的外部能量
输入下实现最优控制力。在结
构反应观测基础上实现的主
动控制成为反馈控制,而在结
构环境干扰观测基础上实现
的主动控制则称为前馈控制。
结构主动控制的基本原理如
图0.1所示。
图0.1 结构主动、半主动与智能控制原理框图
主动控制作动器通常是液压伺服系统或电机伺服系统,一般需要较大甚至很大的能量驱动。主动调谐质量阻尼器(主动控制作动器驱动的调谐质量阻尼器,简称混合质量阻尼器,Hybrid Mass Damper,HMD)和主动质量阻尼器(Active Mass Damper or Active Mass Driver,AMD)等组成的主动控制系统,在高层建筑、电视塔和大型桥塔结构(包括桥塔施工阶段的风振控制)应用了HMD 或AMD主动控制系统。但是,直接将能量转变为控制力并施加在结构层间的主动斜撑(Active Brace
System,ABS)或主动锚索(Active Tendon System,ATS)的控制系统一般需要很大的能量和多个
作动器,这在实际中难以实现。ABS或A TS系统控制小型结构需要数千瓦能源,控制大型结构则高达数千千瓦能源。
结构半主动控制的原理与结构主动控制的基本相同,只是实施控制力的作动器需要少量的能源调节以便使其主动地甚至可以说是巧妙地利用结构振动控制的往复相对变形或相对速度,尽可能地实现主动最优控制力。因此,半主动控制作动器通常是被动的刚度或阻尼装置与机械式主动调节器复合的控制系统。其中代表性的半主动控制装置主要有主动变刚度系统(Active Variable Stiffness System,A VS)和主动变阻尼系统(Active Variable Damping System,A VD)。由于半主动控制系统力求尽可能地实现主动最优控制力,因此主动控制理论(算法)是结构半主动控制的基础;又由于半主动控制系统能够实现的控制力形式和方向的有限性,因此又需要建立反映半主动控制力特点的控制算法(通常成为半主动控制算法)来驱动半主动控制装置尽可能地实现主动最优控制力。1990年日本Kajima研究所的三层建筑钢结构办公楼首次应用了主动变刚度控制系统,经受了实际的中小地震作用并显示出了很好的控制效果。1997年美国首次应用主动变阻尼控制装置控制高速公路I -35连续梁钢桥重载车辆引起的振动,显示出很好的控制效果。目前日本已建成和即将竣工的结构主动变阻尼控制建筑已有10座。
结构主动、半主动和智能控制以其严密的科学理论、优良的振动控制效果、更宽广的适应范围和可灵活选择的控制目标以及多学科交叉与高新技术融合的特征吸引了国内外众多科技工作者研究和应用的兴趣。也正因为多学科科技工作者的交流、合作与联合攻关大为缩短了土木工程这一富有挑战性的领域从研究走向工程应用的历程。为了促进该类技术在工程中的推广应用,系统地研究安装控制装置结构的抗震分析及设计理论,并在此基础上提出实用抗震设计方法是十分必要的。这不仅对深化和发展结构振动控制理论具有重要的学术意义,同时在提高新建和现役结构的抗震能力及减轻地震灾害方面具有明确的应用前景。近十几年来我国在工程结构的隔震、减振与振动控制方面的研究十分活跃,工程应用日益增多,已开始从理论和试验研究、方案设计、结合实际工程进行分析研究,向工程试点和应用的方向发展。
1972年姚治平(J.T.P.Yao)在美国土木工程学会会刊上发表结构控制的论文,介绍了在风及地震作用下土建结构的控制,引起了土建科技、工程界的重视。Roorda J.应用钢索来控制高层结构的振动,并引出主动阻尼等概念。Yang J.N.研究了结构在地震及风振随机激励下的优化控制问题。Martin C.R.等采用Porter B.等提出的模态控制理论分析了多层结构的控制问题。
1976年10月国际理论与应用力学联合会(IUTAM)在荷兰Delft 举行结构控制专题讨论会,次年10 月IUTAM在奥地利Vienna 成立结构控制研究组,由加拿大Leipholz H.H.E.任主席,这使结构控制与研究更趋广泛。McNamra R.J.应用调频质量阻尼器作为耗能装置,研究房屋结构在弹性范围内风振响应的控制。Abdel2Rohman M.等用传感器和驱动器对简支桥梁的最低3 阶模态进行主动控制。Sae-Ung S.和姚治平研究房屋结构在风振下的主动控制,并给出了可行的反馈控制函数。Yang J.N.等导出了分布参数土建结构振动主动控制的传递矩阵方法,并研究了悬索桥振动的稳定性和主动反馈控制,结果表明:控制可使桥梁振动明显减小,但颤动速度显著增加。Abdel-Rohman M.等研究土建结构的优化控制问题,并对结构控制中减少观测者程度进行设计研究。
1979年IUTAM在加拿大Waterloo大学召开结构控制国际专题讨论会,交流论文43篇,由Leipholz H.H.E.汇编成书。Balas M. I. 讨论了大型土建空间结构主动控制技术的适用范围。Chang J.C.H.等用主动质量阻尼器对土建结构进行优化反馈控制。Juang J.N.等用极点测定法(Pole Assignment Method)分析大型建筑结构主动控制的临界模态,讨论了可控性、可观察性和信号溢出等问题。Meirovitch J.等用独立模态空间控制(IMSC)法将模态综合对结构进行主动控制。Soong T.T.等用模态控制法,建立优化设计区域来安置驱动器,从而使输入的能量为最小。Soong T.T.和ChungM.I.提出风洞试验中结构主动控制的研究成果,他们采用的控制装置是放在结构顶部的气动仪器。Vilnay O.研究了结构模态控制中模态参与矩阵的特性。Ab-del-Rolman M. 证明了用极点配置法进行大型结构主动优化控制得到的矩阵。Yang J.N.提出了地震激励下高层建筑开环优
化临界模态控制的方法,他还和Lin M.J.借助一个主动质量阻尼器和主动钢索进行平稳和非平稳地震下结构的临界模态控制。Abdel2Rohman M.等论证了采用钢索主动控制高层建筑比采用调频质量阻尼器更有利。Horvat D.等指出高层建筑风振控制采用半主动调频质量阻尼器,只需要少量外部能量来调节阻尼。Meirovitch L.等用优化独立模态空间控制(IMSC)法进行地震作用下建筑结构的控制。Yang J.N.等进行了强风作用下高层建筑的主动控制研究,结果指出:主动质量阻尼器及主动钢索两者减少振动都是显著的。Abdel-Rohman M.等建议采用直接输出速度反馈来优化控制弹性分布参数结构。Samali B.等研究用一个主动质量阻尼器控制强紊风下高层建筑扭振的可能性,他还和Yang J.N.等研究了在地震作用下,建筑结构用主动钢索和主动质量阻尼器两者进行控制的可能性。Carotti A.等提出了用于管线悬桥在风振下的一个主动保护控制系统。Meirovitch L.等讨论了用IMSC 法抑制悬桥的不稳定颤振模态。Chung L.L.等介绍了在地震作用下用钢索进行主动控制的结构试验结果。Pu J.P.等研究了用IMSC 法来优化线性离散时间输出反馈控制多层建筑结构。
研究土建结构控制还有:Roorder J.讨论了结构反馈控制的试验,Masri S.F.等研究柔性结构的优化脉动控制,并对非柔性结构进行在线控制。Udwadia F.E.等研究了单自由度系统的脉动控制,还对结构和机械系统进行脉动控制。Wang P.C.等研究高层结构的振动控制,Sirlin S.W.等研究浮动结构的主动控制,Abdel2Rohman M. 等研究桥梁中非线性振荡的主动控制和被动控制,Reinborn A.M.等研究超弹性结构的主动控制,Rodellar J.等预测结构的控制和Shi-nozuka M.等研究浮动结构的主动控制等等。
1992年在西班牙召开的第10届世界地震工程会议,结构控制方面的论文就有97 篇,会后美、日等国学者发起成立国际结构控制协会(International Association for Structural Control,IASC)选举美国加州理工学院(Caltech)的浩斯勒(Housner)为主席。在国内,1994年于哈尔滨召开的全国第四届地震工程会议,关于结构振动控制的文章约20篇。1998年于北京召开的第五届全国地震工程会议,关于结构振动控制的论文21篇。近几年来,我国《地震工程与工程振动》、《世界地震工程》、《建筑结构学报》、《同济大学学报(自然科学版)》以及有关院校的学报、科技刊物都发表了不少关于土建结构控制的论文。
1.结构振动主动控制、半主动控制
减震消能方法是将地震输入结构的能量引向特别设置的机构和元件加以吸收和耗散,以保护主体结构的安全。这比传统结构本身及其节点的延性耗散地震能量相比显然是前进了一步。但是消能元件往往与主体结构是不能分离的,而且常常是主体结构的一个组成部分,也不能完全避免主体结构出现弹塑性变形,因此它还不能完全脱离延性结构的概念。从另一方面考虑,减振消能也可以看作是增加结构阻尼的方法。
主动控制是应用现代控制技术,对输入地震动和结构反应实现联机实时观测跟踪乃至预测,再按照分析计算结果应用伺服加力装置(作动器或执行器)对结构施加控制力,实现自动调节,使结构在地震和其它动力作用下的相应控制在允许的范围以内,达到保护结构和设备免遭损伤的目的。主动控制是一种高技术手段,理论上讲是很有效的,对于尺度和荷载都很大的土建结构来讲,由于消耗很大的能源,现实意义不是很大,但对保护设备、设施的安全和减轻由于设备破坏引起的次生灾害方面则是很有效的。
在土建结构中常用的主动控制方法是在结构中适当的位置上应用作动器拖动附加质量快(AMD)或在结构内部(例如房屋楼层之间)安装作动器与弹性元件(拉索或杆件)施加控制力。日本鹿岛公司建的第一栋主动控制房屋用的就是AMD系统。我国在土建结构主动控制方面的研究主要集中在分析、设计方法和模型试验,以及控制系统的计算和优化设计的研究等方面。主要涉及
控制律的选择和时间延迟补偿、反馈方式和参数、结构系统识别与预测方法、参数的不确定性、系统的鲁棒性和可靠度等。为了进一步改善控制的效果,人工智能技术在结构地震反应控制中的应用日益受到重视,如模糊数学方法、遗传算法、神经网络技术、联想记忆系统等。在结构控制中常用的作动器(或执行器)有液压作动器与伺服驱动马达,但近年来对电流变、磁流变、压电和形状记忆合金型作动器等也已经开始研究。主动控制技术为建造更安全的抗震建筑提供了新的途径。但是机构复杂、建设和维修费用昂贵,这些都限制了其在土建结构中的实际应用。
半主动控制兼有被动控制和主动控制的优点。它具备主动控制的效果又只需很小的电能通过调节和改变结构的性能减小地震反应,因此比较适合于改善工程结构的抗震设防。
2.结构振动控制分类
结构振动控制分为主动控制、被动控制、半主动控制和混合控制。
结构振动控制一般可按下述三种方式进行:
(1)按主动控制的利用程度分类,主要有主动控制、半主动控制、混合控制。
a)结构主动控制(Active Control)
结构减震控制目标的实现全部依赖主动控制。
b)结构半主动控制(Semi Active Control)
以被动控制为主要减震体系,但辅以主动控制手段,施加部分外力或改变结构参数与工作状态。例如,在TMD系统中辅以主动控制手段,使TMD半自动化;其调谐作用辅以部分自动控制,以较小的能量输出达到较明显的减震效果。
c)结构混合控制(Hybrid Control)
在一个结构上同时采用被动控制和主动控制系统。被动控制简单可靠,不须外部能源,经济易行,但控制范围及控制效果受到限制。主动控制的减振控制效果明显,控制目标明确,但须外部能源,系统设置要求较高,造价较高。把两种系统混合使用,取长补短,可达到更加合理、安全、经济的目的。例如,当结构在常遇激励时(风或中小地震),主要依靠被动控制系统实现减震;当结构遭受罕见激励(大地震),主动控制系统被启动参与工作,结构同时依靠被动、主动两种系统联合运作,达到最佳的减震控制效果。
(2)按实现控制的手段分类,主要包括以下几种。
a)施加外力控制型
通过对结构(或装置)。主动施加控制力以衰减和控制结构的振动反应。例如,主动质量阻尼器AMD(Active Mass Damper)、主动质量驱动器AMD(Active Mass Driver)、主动拉索系统ATS (Active Tendon System)、主动挡风板ADA(Aero Dynamic Appendage)、脉冲发生器PG(Pulse Generator)等。
b)改变结构参数型
通过主动改变动力特性(或结构形式)以衰减和控制结构的振动反应。例如,主动变刚度系统A VS(Active Variable Stiffness)、主动变阻尼系统A VD(Active Variable Damping)、主动支撑系统ABS(Active Bracing System)等。
c)智能材料自控型
通过采用智能材料(Smart Material),自动调节并衰减和控制结构振动反应。例如,形状记忆合金材料SMA(Shape Memory Alloy)、压电层材料PEL(Piezo-electric Layer)、电流变体或磁流变体材料(ER Fluid, MR Fluid)等。
???????????????
???????????????????????????????????????PEL SMA ERFD MRFD ABS AVD AVS APTMD /HMD PG ADA
ATS AMD AMD 压电层材料形状记忆合金电流变磁流变智能材料自控型主动支撑系统主动变阻尼系统主动变刚度系统改变结构参数型被动调谐质量阻尼器主动混合质量阻尼器脉冲发生器主动挡风板主动拉索系统主动质量驱动器主动质量阻尼器施加外力控制型按控制手段 (1) 按控制器的工作方式分类,主要有:
(a ) 开环控制(open-loop control )
控制系统根据外部激励信息来调整主动控制力。
(b ) 闭环控制(close-loop control )
控制系统根据结构的地震响应信息调整主动控制力。
(c ) 开闭环控制
控制系统同时根据外部激励和结构的地震响应的综合信息调整主动控制力。
图3.1 开环控制和闭环控制
3.各类控制系统构造及性能
3.1 结构振动主动控制概述
结构主动控制是一种现代振动控制方法。尽管五十年代国外已有尝试,但真正进行系统研究并应用于高层建筑还是1990年前后的事。虽然目前推广主动控制系统有很多困难,但考虑到它能使结构地震反应大大降低,且基本不受强震地面运动周期特性影响,以及由于建筑结构向高、长、大
方向发展,势必对结构控制提出更高要求,一般被动控制就难以胜任,因此适用范围大,控制效果好的主动控制方法自然引起关注。
主动控制系统的控制装置大体上由仪器测量系统、控制系统、动力驱动系统等组成。传感器将测得的地震动或结构反应或两者的信息传送到控制系统,通过计算机处理这些信息,按给定的控制算法计算所需的控制力,经过回路变成控制信号又传到动力驱动系统,由此借助外部能源产生控制力加于结构之上以减小地震反应。
要对结构进行主动控制,必须时刻给结构施加最佳控制力,为此需要配置能够测出所需信息的各种传感器,其配置方法有两种:
(1) 前馈控制法。如在地基上设置传感器;
(2) 反馈控制法。如在结构内部设置传感器。
第一种方法较简单,它是通过传感器感知输入结构的振动,以调整控制力,结构的反应并未反映在控制中。即形成了如图3.1a 所示的开环控制系统。
第二种控制方法是根据结构反应信息调整控制力,形成如图3.1b 所示的闭环控制系统。
这种控制方法无需事先将结构的振动特性确切的反映到控制回路中,可对结构的非线性性能进行跟踪。
此外,还可以同时考虑两种控制方法,采用开闭环回路。
3.1.1 主动控制控制原理
1.振动方程:
以单质点体系为例,在地震波作用下,它的运动方程为:
g
X M KX X C X M -=++ (3.1) M 、K 、C —— 分别为结构的质量、刚度、阻尼;
g
X —— 地面运动加速度; X
—— 由地动加速度引起的相对地基的反应加速度; X
—— 由地动加速度引起的相对地基的反应速度; X —— 由地动加速度引起的相对地基的反应位移。
同样,主动控制力P 作用于该结构上,有;
P KZ Z C Z M =++ (3.2) Z
—— 由P 产生的相对地基的结构反应加速度; Z
—— 由P 产生的相对地基的结构反应速度; Z —— 由P 产生的相对地基的结构反应位移。
由上述两式可得结构在控制力作用下对地基的相对坐标系运动方程(3.3)和对地面的绝对坐标系运动方程(3.4):
g
X M P Z X K Z X C Z X M -=+++++)()()( (3.3) g
g g g g KX X C P Z X X K Z X X C Z X X M ++=++++++++ )()()( (3.4)
2.主动控制力:
施加主动控制力有如下两种情况:
(a )根据地震输入调整控制力:
这属于前馈开放式回路控制方式,控制力与结构反应无关,所施加的最佳控制力P 就是抵消输入动作用的力,即:
Y
M P = (3.5) )(KY Y
C P +-= (3.6) (b )根据结构反应量调整控制力:
这实际上是反馈控制方式,即由结构反应确定最佳控制力。
现采用根据反应的三个分量——加速度、速度、位移来调整控制力的方法。这种方法是由反应量求得与当前控制力相应的增量P Δ。若这种修正能在瞬间进行,控制力的形式与(3.5)、(3.6)所得的最佳控制力一样,可使结构反应量无限趋近于零。这时由
(3.5)、(3.6)可得相对坐标系的增量P Δ的表达式(3.7);由式(3.4)、和(3.6)可得绝对坐标系的增量P Δ的表达式(3.8)。
[])()()(Z X K Z X C Z X
M P +++++-=? (3.7) []
)()()(Z X X K Z X X C Z X X M P g
g g ++++++++-=? (3.8) 当然,也可以采用反应量的一个或两个分量来调整控制力,只不过与此对应的是以降低反应量为目的,而不是使反应量为零。
3.控制振动形式:
(a )输入反射方式:
这是一种抵消输入动的方法,可以采用前馈和反馈控制法。在无驱动时间滞后的理想情况下,相对坐标系下的反应为零。结构如同刚体一样,与地面一起运动。
而在绝对坐标系下,虽然结构的绝对反应量为零,但结构与地基会产生相对位移。为了解决这个问题,可以采用诸如叠层橡胶支撑或摩擦小的滑动支撑。
(b )阻尼器附加形式:
若以附加结构阻尼力作为控制力,则有 Y M Z X K Z X C C Z X
M -=+++'+++)())(()( (3.9) Y M Z X K Z Y X C Z X C Z X
M -=++++'++++)()()()( (3.10) (c )固有周期变化方式:
这是在检知输入地震动的周期的特性基础上,用控制力使结构形式上的周期发生变化,避免与输入动的主要振动分量发生共振而采用的一种方式。
4.控制原理的一般描述:
对于利用外部能源施加控制力的主动控制结构体系,可用下面一般式来表达:
Y ME Lf KX X D X
M -=+++ (3.11) 式中,X 为位移向量;Y
为地震动加速度;f 为控制力向量;M 为质量矩阵;D 为阻尼矩阵;L 为控制配置的矩阵;E 为地震干扰作用位置的向量。
若以Z 表示状态向量,可将上式改成状态方程:
Y C Bf AZ Z
++= (3.12) 式中:
??????--=--D M K M I
A 110 ??????=-L M
B 10 ??????=-L M B 10 ??????=X X Z 作为控制力,f 可以表达为:
Y
G Z G f f b --= (3.13) 式中
b G —— 控制的反馈增益矩阵;
f G —— 控制的反馈增益矩阵;
将式(3.13)代入(3-1-12)中,有:
Y BG C Z BG A Z f
b )()(-+-= (3.14) 比较式(3.14)与除去右端第二项的式(3.13)可知,由于控制力的作用,结构的动力性与干扰力的大小分别由A 变更为)(b BG A -以及由C 变更为)(f BG C -。也就是说,如果能够连续而且主动地变更这些增量,使其经常保持最优状态,就可以实现完全非稳态。非共振型的理想主动控制。要做到这一点,需要使用现代控制论的方法。在结构振动控制的现代控制理论中,解决这一问题的常用办法有:
(1) 经典线性最优控制法;
(2) 瞬时最优控制法
(3) 极点配置法;
(4) 独立模态空间控制法;
(5) 随机最优控制法;
(6) 界限状态控制法
(7) 模糊控制法
(8) 预测实时控制法
(9) H ∞优化控制;
(10) 变结构控制。
主动控制算法是主动控制的基础,它们是根据控制理论建立的。好的控制理论算法必须在线计算时间短、稳定性及可靠性好、抗干扰能力强。
3.1.2 加力方式及加力位置
将控制力传递到结构上,有两种方式:
1. 作用于固定面的反力施加方式。这种方式容易获得较大反力,但加力位置局限于结构底部;
2. 将辅助装置的惯性力作为施加反力的方式。这种方式加力位置自由,但不易得到较大反力。
3.1.3 控制装置
主动控制因涉及多个领域,需要投入大量人力、物力资源,故目前仍处于探索阶段,工程应用十分少见。现在研究开发的主动控制装置主要有:
1.主动调谐质量控制系统(AMD):
AMD控制系统在系统惯性质量与结构间提供一对控制作用力,用以调整主体结构与惯性质量之间的能量分配。AMD控制系统抗震及抗风效果都较好,但对刚度敏感,而且造价较高。AMD控制装置主要包括惯性质量、刚度元件、阻尼元件和作动器四部分。典型的AMD装置有摆式、橡胶垫式和导轨式等形式。AMD控制装置的作动器一般为电液伺服系统或电机伺服系统,是AMD系统提供主动控制力的重要硬件,运行时需要较大的外部能源。一个典型的作动器的伺服系统由液压缸、旁通管路、比例阀、电磁阀和伺服阀以及油源组成,液压缸两腔内的压力差即为作动器的驱动力。当旁通管路上的比例阀关闭时,油源的油经伺服阀和电磁阀分别流入液压缸的两腔,并由伺服阀控制左右两个油路的流量,从而控制液压缸两腔的压力差;当比例阀打开时,液压缸和旁通管路形成新的液压系统,该系统相当于被动油阻尼器,油液只在液压缸和旁通管路中流动,而不经过电磁阀和伺服阀以及油源的油路,这时系统相当于被动TMD系统。
2.主动锚索控制系统:
该系统通过改变挡风板的受风面积来调整锚索张力,对结构施加控制作用。该装置对刚度及阻尼的误差不敏感,但对时滞较敏感。它能提供横向及扭转控制力,控制效果较为理想,而且既能用于控制地震反应,又能控制风振反应。其构造简图()
3.主动空气动力挡风板控制系统:
该系统通过改变挡风板的受风面积来调整挡风板所受的风压力,抑制结构的风振反应。由于大部分控制能量来源于风力,因此控制系统只提供改变挡风板受风面积的操纵杆滑动能量,这种装置只能用于抗风,而且对时滞较敏感。其构造简图如图()
4.气体脉冲发生器控制系统:
气体脉冲发生器是以气体冲击形成脉冲控制力。脉冲控制力的方向和幅度调节灵活。该装置效果较好,是界限状态控制的理想装置。
5.主动支撑系统:
在抗侧力构件上增加斜撑;利用电液伺服机构控制斜撑的收缩运动,形成主动控制装置。该装置适用于高层、高耸和大跨结构。
除此之外,还有一些主动控制装置,如线形马达控制系统等。
3.2 结构振动半主动控制概述
结构半主动控制的原理与结构主动控制的基本相同,只是施加控制力的作动器需要少量的能量调节以便使其主动地甚至可以说是巧妙地利用结构振动的往复相对变形或相对速度,尽可能实现主动最优控制力。因此,半主动控制作动器通常是被动的刚度或阻尼装置与机械式主动调节器复合的控制系统。其中代表性的半主动控制装置主要有主动变刚度系统(Active Variable Stiffness System,A VS)和主动变阻尼系统(Active Variable Damper,A VD)。由于半主动控制系统力求尽可能地实现主动最优控制力,因此主动控制理论(算法)是半主动控制的基础;又由于半主动控制系统能够实现的控制力形式和方向的有限性,因此又需要建立反应半主动控制力特点的控制算法(通常成为半主动控制算法)来驱动半主动控制装置尽可能地实现主动最优控制力。半主动控制系统结合了主动控制系统与被动控制系统的优点,既具有被动控制系统的可靠性,又具有主动控制系统的强适应性,通过一定的控制律可以达到主动控制系统的控制效果,而且构造简单,不会使结构系统发生不稳定。
半主动控制一般以被动装置为主体,它仅需少量能量用于改变被动控制系统的参数或工作状态,以适应结构对最优状态的追踪。半主动控制比主动控制容易实施而且更经济,控制效果与主动控制相近,所以具有较大的研究和开发价值。
半主动控制往往采用开关控制(或称0—1控制),即通过开关来改变控制器的工作状态,从而改变结构的动力特性。目前,除了KOBORI开关控制法之外,还可采用遗传算法、瞬时最优控制法等方法。
当前较为典型的半主动控制装置有:
1.主动变刚度控制系统(AVS):
结构主动变刚度控制是通过变刚度装置来主动地改变结构的附加刚度,使结构控制系统的自振频率远离干扰的卓越频率,避免结构发生共振,从而减小结构反应,这是一种频变的控制方法。结构主动变刚度控制是通过刚度元件的变形将结构部分振动能量转化为刚度元件的弹性变形能,然后通过刚度元件释放其吸收的弹性变形能(实际转换为伺服系统的热能),同时阻尼元件消耗部分振动能量,从而减小结构的振动。
附加刚度状态的变化和切换由装置中的控制器按照一定的控制算法操纵伺服系统实现。典型的主动变刚度控制装置由刚度元件、液压缸和电液伺服阀三部分组成。
主动变刚度控制系统可以实现以下几种控制方式:1)控制器始终处于锁定状态(实际为被动控制,称为Passive—on)。2)控制器始终处于打开状态(实际也为被动控制,称为Passive—off)。3)控制器按照某种控制算法确定主动变刚度控制装置的开或关状态,当采用半主动开/关控制算法时或称为ON/OFF控制算法。
2.主动变阻尼控制系统(AVD):
即通过主动调节变阻尼控制装置的阻尼力,使其等于或接近主动控制力,从而达到与主动控制接近的减振效果。主动变阻尼控制装置一般在传统的液压流体阻尼器或粘滞流体阻尼器的基础上,设置可控伺服阀以构成具有控制流体流量、连续改变阻尼力、控制宽频带多种激励振动能力的“智能”阻尼器。
主动变阻尼装置是在被动粘滞液压缸的基础上增设伺服控制系统的旁通管路,控制器按照主动控制力的要求调节伺服阀的开口大小、控制流过伺服阀的液体流量,调节液压缸两腔内的压力差,从而给结构提供连续可变的阻尼力,以便实现与主动控制力相等或接近的阻尼力,从而达到与主动控制相近的减振效果。主动变阻尼控制装置主要由液压缸、活塞和电液伺服阀三部分组成。由于主动变阻尼控制装置只需要调节或控制伺服阀的开口大小,因此所需要的能源非常小,一般几十瓦就可以提供100~200t的阻尼力。
主动变阻尼控制装置提供的阻尼力与伺服阀的开口大小有关。当在控制实施过程中伺服阀开口始终保持完全打开状态时,主动变阻尼装置提供最小的阻尼力,相当于被动粘滞阻尼器,一般称为Passive—off状态;当在控制实施过程中伺服阀始终保持完全关闭状态时,主动变阻尼装置提供最大的阻尼力值,也相当于被动粘滞阻尼器,一般称为Passive—on状态。
主动变阻尼控制装置只能实现与结构运动方向相反也即阻止结构运动的阻尼力,而不能像主动控制那样可以实现任意方向的控制力,既可以阻止结构运动也可以推动结构运动。正因为这个原因,结构主动变阻尼控制是无条件稳定的,而且具有很好的鲁棒性。
3.主动变刚度变阻尼控制系统(AVSD):
主动变刚度变阻尼控制系统将A VS和A VD控制有机地结合了起来,既有A VS系统能主动避开地震卓越频率的优点,又具有A VD系统能削减反应峰值,对较宽频带内的外界激励所具有的非频变的减震性能的优点。控制系统主要包括三个组成部分:信号处理系统、控制器和可变刚度/阻尼控制装置。当地震发生时,系统工作进程为:①在每一采样时间,信号采集系统向控制器发送地面加速度及结构反应的测量信号;②依据某种控制律,控制器确定当前时刻可变刚度\阻尼控制装置的开关启闭状态;③控制器发出指令并驱动控制装置进行开关切换。该控制系统构造简单,工作稳定可靠,时滞现象不明显,仅需少量外部能量。当前已有的理论研究及试验验证均表明该方案可行、有效。
4. 可变液体阻尼控制系统(ER/MR):
电流变液(Eletrorheological Fluid ,简称ER)磁流变液(Magnetorheological Fluid ,简称MR)电(磁)流变液是一种可控流体,是用不导电(磁)的母液(常为硅油或煤油等)和均匀散布其中的固体电解质颗粒或磁性颗粒,加适量的稳定剂制成的非胶体性质的悬浮液。在电场(或磁场)的作用下两相电流变液(或磁流变液)中的固体颗粒会形成纤维状的链,横架于电场的正负两极板(或磁场的两极板)之间,这样两相电(磁)流变液在电(磁)场的作用下就能从流动性良好的具有一定粘滞度的牛顿流体转化为有一定屈服剪切力的粘塑性体,产生“固化”现象。稳定剂是用来确保颗粒悬浮于母液之中的,其配量与流变液的稳定性有关。这种将固体、液体和电(磁)性等特性统一而形成的一种新材料,本身就孕育了许多新的应用。
磁流变液和电流变液作为性质相似的可控流体具有以下四个重要的特点:
(1) 连续性:随着电(磁)场强度的变化,流变液的屈服剪切力可连续变化。
(2) 可逆性:两相流变液随着电(磁)场强的变化可以在固相和液相之间相互转化。
(3) 响应时间短:两相流变液跟踪电(磁)场强度变化的精度可达10-3S 数量级。
(4) 耗能小:一般只需十几瓦至二十瓦功率的能源。
电(磁)流变液具有上述良好的物理力学性能,因而是用作智能半主动控制驱动器的理想材料。以电(磁)流变流体材料制成的阻尼器具有反应迅速、阻尼力大而且连续可调等优良性能。电磁流变半主动控制系统由传感器、电磁流变驱动器、控制器及受控结构组成。其具体执行过程示意图为:
电流变液Bingham 模型的剪应力τ与剪切速率γ 的关系为
)sgn()(0γτγητ E y += (1a )
磁流变液Bingham 模型的剪应力τ与剪切速率γ 的关系为
)sgn()(γτγητ H y += (1a )
式(1)中,)(E y τ,)(H y τ分别为电、磁流变液的屈服剪应力,与外加电、磁场强度有关;0η,η分别为电流变的表观粘度和磁流变液的动力粘度。
电流变和磁流变产生的机理不同,因而它们的物理力学性能也有所不同,MR 相对ER 主要优点是耗能更小。MR 驱动器提供的驱动力更大,但由于MR 长期的沉淀较大,故在持时较短的地震作用下,可能在瞬时不能提供理想的驱动力。
根据磁流变的产生机理,人们设计了各种形式的磁流变减振驱动器,并给出了相应的驱动力计算公式,它们主要有挤压流动式、剪切式、阀式和剪切阀式MR 阻尼器。其中剪切阀式MR 阻尼器因结构简单、可调范围大而被较多研究者采用。
5. 其它半主动控制系统:
除上述四种半主动控制系统外,目前还有半主动隔震装置、可控调谐液体阻尼器、半主动冲击阻尼器多态可控TMD 等半主动控制系统。
半主动隔震装置是在传统的摩擦式隔震的基础上,安装一个与压力控制系统相连的液压腔,液压腔的作用是调整摩擦阻尼面的正压力。隔震系统仍采用摩擦原理,摩擦材料为聚四氟乙烯。由于摩擦阻尼面是可调控的,因此使系统的隔震性能达到最优。
传感器 信号转换(A/D ) 控制器 传感算法
受控结构 电磁流变驱动器 信号转换(D/A )
目前,半主动控制的工程实际应用比较少见。1990年日本Kajima研究所的一栋地上三层的钢结构办公楼首次应用了主动变刚度系统。经受了实际的中小地震作用并显示了很好的控制效果。
4.结构振动主动控制、半主动控制算法
1972年美国Yao结合现代控制理论,提出了土木工程结构振动控制的概念。开创了结构振动的主动控制研究新的里程。
控制算法是结构振动主动控制研究的重要内容,尽管结构主动控制算法系源于现代控制理论,但这些理论在土木工程结构的应用中产生了一系列的特殊问题,有待于进一步研究解决。20多年来,国内外从事结构控制的学者对主动控制算法进行了大量的研究,取得了一系列成果。从原理上讲,所有现代控制理论的控制算法都可以借鉴过来用于结构主动控制。但由于土木工程结构的特殊性,有些算法可直接应用,有些算法就要作些特殊处理。目前主动结构振动控制常用的7种算法,包括经典线性最优控制、极点配置法、瞬时最优控制、独立模态控制、H∞状态反馈控制、滑动模态控制及最优多项式控制。
结构控制算法分为经典算法与现代算法两类。
1.经典算法(Classical Approach) 有限个自由度线性系统运动方程为常系数常微分方程,用拉普拉斯变换求解很方便,将输入与输出表为传递函数(Transfer Function) ,单输入、单输出时是单个传递函数,对于多输入、多输出系统,则每一个输入对每一个输出对应于一个传递函数,这就要组成传递函数矩阵,计算的复杂性大大地增加了。对于系统振动稳定性问题,涉及寻求传递函数的极点(pole) ,发展了各种图解的方法,有根点轨迹法(Root2locus Method) 、赖奎斯特图(Nyquist Plots) 、预兆图(Bode Diagram) 和黎赤尔斯图(Nichols Plots) 等。
2.现代算法(Modern Approach) 经典算法计算主要归结为传递函数,它实现于复平面时域或频率域。而现代算法计算主要用时间域,采用状态空间法(State Space Method) 来描述系统的动力性态,其数学工具为线性代数、矩阵理论和变分法。
近几年来,应用计算机辅助设计结构系统的控制问题已发展有功能很强、应用广泛的软件包MATLAB ,作为MA TLAB 的发展SIMULINK,它可以用来分析计算采取图表描述的结构动力系统。
(1) 经典线性最优控制法
该算法基于现代控制理论, 以线性二次型性能指标为目标函数来确定控制力与状态向量之间的关系式。目标函数中用权矩阵来协调经济性与安全性之间的关系, 需求解Riccati 方程。由于该算法忽略了荷载项, 严格说来, 由它得到的控制不是最优控制;但数值分析和有限的试验证明, 这一控制算法虽然不是最优的, 但是可行的和有效的。
(2) 瞬时最优控制算法
该算法以瞬时状态反应和控制力的二次型作为目标函数, 在动荷载作用的时间范围内, 每一瞬时都实现其目标函数最小化。该算法不需求解Riccati 方程, 计算量减小;增益矩阵与受控结构的协调特性无关, 控制系统的鲁棒性能较好; 具有时间步进性, 可推广用于非线性、时变结构系统。但该算法只是一种局部最优控制算法, 从控制结构最大反应这个意义上讲, 仍然不是最优控制。
(3) 极点配置法
在状态空间里, 系统矩阵决定系统的动态特性。可通过选择适当的增益矩阵, 使闭环系统的动态特性取得满足设计者要求的预期值, 这就是极点配置法。极点配置法在仅考虑对结构反应影响较大的少数几阶振型时, 可以很容易实现。但这种方法所选择的增益矩阵通常都不是唯一的。因此极点配置法得出的控制律也不是最优的, 但该算法较为简单、易行。
(4) 独立模态空间控制法
独立模态空间控制法是基于振动体系振型分解的概念建立的, 多个自由度体系的运动方程由正
交原理可分解为个独立的对应不同模态的单自由度运动方程, 对各模态可分别进行控制设计。对于求出的模态控制作用通过模态的参与矩阵进行线性变换, 由模态控制作用得出结构控制作用。为了节省时间, 控制设计可只针对几个主要振型进行。该算法的先决条件是结构必须可控而且可观测。在实际结构中, 由于模态截断引起控制溢出和观测溢出, 前者将影响实际系统的性能, 而后者可导致残余模态的不稳定;而且该控制法显然仅对线性系统有效。严格来讲, 独立模态控制的必要条件是控制器布满体系的所有自由度, 但作为一种近似方法, 控制器数目少于体系自由度时, 亦可应用此法, 只是所截取的振型数目要和控制器的数目相同。
(5) 随机最优控制法
将随机最优控制理论用于结构控制, 对于线性二次高斯问题(LQ G) , 分离原理成立, 可直接求解最优反馈控制的Riccati 方程满足解答。对于其它的随机最优控制问题,分离原理还没有得到证明。工程上有许多随机过程都应用分离原理, 将最优估计与最优控制分开进行, 从而给设计工作带来方便, 并且应用上大多是成功的, 但其控制效果是否是最优的, 在理论上尚未证明。
(6) 界限状态控制法
根据结构的安全性、适用性和舒适性要求, 预先给定结构反应的限值。一旦实际结构反应超出限值, 则控制系统启动, 利用外加控制力减低结构反应, 这就是界限状态。该算法控制目标明确, 实施简便, 在线计算量小, 适用于线性和非线性系统。界限状态控制法尽管在控制力计算中建立了目标函数, 但脉冲控制力的施加在本质上仍是试探性和直接推断的, 因此, 它不是最优控制法。
(7) 自适应控制法
自适应控制大致可分为自适应前馈控制、自校正控制和模型参考自适应控制三大类。结构振动自校正控制是一种将受控结构参数在线辨识与控制器参数整定相结合的控制方式。控制时辨识器根据系统的输入输出信息, 在线地辩识系统的模型参数或状态,并自动校正控制律。这样, 结构可以根据状态和干扰特性的变化自动校正控制动作, 达到输出方差最小的控制目的。
(8) 模糊控制法
模糊控制方法是处理工程结构和环境中不确定因素的一种有效的控制方法。模糊控制不需要对系统模型进行精确地计算, 直接根据系统的输入输出特性给出控制指令, 因此其控制虽然不是最优的, 但是是有效的。
(9) 预测实时控制法
预测控制采用最优估计理论, 由所测得的结构反应预测将要发生的结构反应或外部激励, 并不断修正预测律, 针对预测的结构反应或外部激励, 计算施加的控制力。H2 和H ∞控制理论以及滑动模态控制理论(SMC) 可以用于主动控制, 联合使用H2 和H ∞优化控制, 将使闭环系统在低频和中高频具有较好的频率响应, 提高了抗干扰能力。
在实际工程中, 结构的自由度往往很大, 很难实现全状态观测。此外, 分析模型与实际结构往往也存在差异。因此, 从应用的角度出发, 各国学者提出了许多既能满足工程要求, 又能简化计算的准最优控制, 如降阶控制、状态重构控制。
4.1 主动控制算法
结构在环境干扰和控制力作用下的运动方程一般可以表示为如下的形式:
)()()()()(t U B t F D t KX t X C t X M s
s +=++ 00)(X t X = 0
0)(X t X = (4.1) 式中,M 、C 和K 分别是结构n ×n 维的质量、阻尼和刚度矩阵;X 、X
和X 分别是结构n 维的
位移、速度和加速度向量;F 和U 分别是r 维环境干扰和p 维控制力向量;D s 和Bs 分别是相应于描述结构运动坐标的环境干扰和控制力位置矩阵,分别是n ×r 和n ×p 维的矩阵。
引入状态向量{}T T T X
X Z =,则运动方程式(3.1)可以表示为以下状态方程的形式: )()()()(t BU t DF t AZ t Z ++= 0
0)(Z t Z = (4.2) 式中,A 是用状态方程描述的2n ×2n 结构系统特征矩阵,可以容易地由结构的质量、阻尼和刚度矩阵M 、C 和K 求得;D 和B 分别是相应于描述结构状态坐标的环境干扰和控制力位置矩阵,分别是2n ×r 和2n ×p 维的矩阵,可以容易地由D s 和Bs 求得。
现代控制理论的主要特点之一是观测和控制,即在实时观测的基础上实施实时控制,亦即反馈控制,以期达到最优的控制效果。假设结构系统部分或全部的状态、干扰和控制力的m 维输出方程可以写成为
)()()()(000t U B t F D t Z C t Y ++= (4.3)
式中,C 0、D 0和B 0分别是结构系统的状态、干扰和控制力输出矩阵,分别是m ×2n 、m ×r 和m ×p 维的矩阵。它们的形式取决于观测的项次和观测的方式,即是全部或部分观测和直接或间接观测。
结构主动控制算法是要在设定的最优控制目标下根据状态方程(3.2)和(3.3)确定最优控制力向量U (t )。线性最优反馈控制算法确定的最优控制力向量一般总可以表示为状态(或输出)和
/或干扰反馈线性组合的形式。假定表示为以下一般的形式:
)()()()()(3210t X G t X G t X G t F G t U ----= (4..4)
式中,G i (i =0,1,2,3)是恰当维数的反馈增益矩阵。将(3.4)代入方程(3.1),得到
)()()()()()()()(0
123t F G Ds t X G K t X G C t X G M -=+++++ (4.5) 因此,线性反馈实质上是通过改变结构质量、阻尼和刚度等参数以及环境干扰来实现结构主动控制目的的。式(3.4)中反馈增益矩阵G i (i =0,1,2,3)取决于所采用的控制算法。
近30年来应用和发展起来的、适用于土木工程中常用的主动控制算法,主要有极点配置、线性二次型线性最优控制(LQR )(Yang 1975)、二次型线性Gauss 最优控制、独立模态最优控制(Martin and Soong ,1976)、极点配置或最优配置(Abdel-Rohman and Leipholz ,1978)、脉冲控制(或称反应限界控制)(Masri et al .,1980)、预测最优控制(Rodellar et al .,1987)、滑动模态控制(或称变结构控制)(Yang et al .,1994)、自适应控制(Wada and Das ,1992)模糊控制(Soong ,1990)、H 2和H ∞最优控制(Shhardjo ,1990)和非线性反馈最优控制(Wu ,1995)等控制算法。
4.1.2 几种算法的简单介绍
1.受控系统的状态方程
假设结构模型是一个n 自由度的集中质量—弹簧—阻尼系统,受控结构系统的矩阵运动方程为
)()()()()(t Ef t Du t Ky t y C t y
M +=++ (4.6) 其中M ,C 和K 分别是n ×n 阶质量、阻尼和刚度矩阵,y(t)是n 维位移向量,f(t)是r 维扰力向量,u(t)是m 维控制力向量。n ×m 阶矩阵D 和n ×r 阶矩阵E 分别是控制力和外扰力的位置矩阵。
假设控制系统为一闭-开环系统,即控制力是位移向量y(t)、速度向量)(t y '和外扰力f (t )的线性函数。则控制力可表达为
)()()()(111t f E t y
C t y K t u ++= (4.7) 其中1K ,1C 和1E 分别为位移向量、速度向量和外扰力的控制增益矩阵。
将式(4.7)代入(4.6),得:
)()()()()()()(111t f DE E t y dK K t y DC C t y
M +=-+-+ (4.8) 可以看出,闭环控制得作用就是改变结构得参数(刚度和阻尼),开环控制的作用就是改变(减或消除)外扰力。控制增益矩阵1K ,1C 和1E 的取值由所选的控制算法决定。
将式(4.6)改写为下面的状态方程:
)()()()(t Hf t Bu t Ax t x
++= , 0)0(x x = (4.9) 其中
??
????=)()()(t y t y t x (4.10) 是2n 维状态向量,
??????--=--C M K M I
A 110,??????=-D M
B 10 和 ??????=-E M I H 1 (4.11) 分别是2n ×2n 阶系统矩阵、2n ×n 阶控制器位置矩阵和2n ×n 阶外扰力位置矩阵。式(4.11)中的0和I 分别表示n ×n 阶零矩阵和单位矩阵。其他有关符号说明同上节。
2.经典线性最优控制(classical linear optimal control )
在经典线性最优控制中,控制向量u(t)的选取要使得性能指标J 为最小。性能指标J 通常取为 []
d t t Ru t u t Qx t x J f
t T T ?+=0)()()()( (4.12) 式中,Q 和R 为权矩阵。
为了求解式(4.9)约束条件下式(4.12)的最优控制问题,首先要用一个拉格朗日时变因子λ(t)将该两式合并形成为如下的拉格朗日函数L :
[]{}dt t x t Hf t Bu t Ax t t Ru t u t Qx t x L f
t T T T ?-++++=0)()()()()()()()()( λ (4.13)
将L 对)(t x 和)(t u 进行变分并令之为零,可得出该最优控制的必要条件为
)(2)()(t Qx t A t T --=λλ , 0)(=f
t λ (4.14) )(2
1)(1t B R t u T λ--= (4.15) a.闭环控制
当控制向量仅由状态向量调节时,可设
)()()(t x t P t =λ (4.16)
将上式代入(4.9),(4.14)和(4.15),并令f(t)为零,得出如下的Riccati 方程:
02)()()(2
1)(21)()(1=++--+'-Q t P A t P B BR t P A t P A t P t P T T ,0)(=f t P (4.17)
通过求解该Riccati 方程,可得出未知矩阵P (t ),因此也称P (t )为Riccati 矩阵。
将式(4.16)代入式(4.15),得出线性最优控制律(Linear Optimal Control Law )为
)()(2
1)()()(1t x t P B R t x t G t u T --== (4.18) 式中)(2
1)(1t P B R t G T --=为控制增益。 数值计算表明,)(t P 在控制域保持着常值,接近f t 时突然降为零。因此,)(t P 通常可近似为常矩阵P ,Riccati 方程式(4.17)可简化为
022
11=++--Q P A P B PBR PA T T (4.19) 控制增益)(t G 也是一个常矩阵
P B R G T 12
1--= (4.20) 该增益可预先算出。
b.闭—开环控制(close -open -loop control )和开环控制(open -loop control ) 当状态当量和外扰力同时作用于调节控制向量时,形成闭-开环控制。设
)()()()()(t f t S t x t P t +=λ (4.21)
同样,将上式代入式(4.9),(4.14),(4.15),得出如下的Riccati 方程:
[]
0)()()()()()()(21()()(2)()()()(1=+??????+--+++-+-t f t S t f H t P t S t A B BR t P t S t x Q t P A t P A t P t P T T 0)(=f t P ,0)(=f t S (4.22)
让该等式的第一部分等于零,可用前面闭环控制的方法求出增益矩阵)(t P 。剩下部分为
0)()()()()()()(21()(1=+??
????+---t f t S t f H t P t S t A B BR t P t S T ,0)(=f t S (4.23) 遗憾的是开环控制增益)(t S 通常无法求出。这是因为求解上式时需要预先知道)(t f 和)(t f '在全部控制域上的值。这在结构控制中是行不通的。
对于开环控制,有
)()()(t f t S t =λ (4.24)
在求解过程中,出现与闭-开环控制相同的问题。因此,开环控制在结构控制中是无法实现的。
要说明的是,此处所述的“开环控制”或“闭环控制”的前提是经典线性最优控制。因为采用其他控制算法时,开环控制有时是可行的。
3.极点配置法(pole Assignment )
考虑状态方程(4.9),系统矩阵A 的特征值i η与原结构的模态频率i ω和模态阻尼比i ζ的关系为:
21i i i i i j ζωωζη-±=,1-=j (4.25)
设控制力是状态的线性反馈,即
)()(t Gx t u = (4.26)
式中G 是常增益矩阵,将上式代入(4.9),得到闭环控制系统的方程
)()()()(t Hf t x GB A t x ++=', 0)0(x x = (4.27) 受控结构的系统矩阵变为GB A +,产生新的特征值'i η,并对应新的模态频率'
i ω和模态阻尼比'i ζ。
极点控制的目的就是要选择适当的增益矩阵G ,使得受控结构具有所希望的模态频率'i ω和模态阻尼比'i ζ,即控制系统的极点位于所希望的位置上。
极点配置的算法在控制理论中已经进行了充分的研究。将它用于结构的振动控制,仅当几个特殊振型决定结构反应时才有效。
4.瞬时最优控制(instantaneous optimal control )
取时变性能指标)(t J 为 )()()()()(t Ru t u t Qx t x t J T T += (4.28)
寻找最优控制律,使得性能指标)(t J 在f t t ≤≤0的每一瞬时t 均为最小。
考虑状态方程(4.9),假设系统矩阵A 具有不同的特征值。用A 的特征向量作列向量,形成2n ×2n 阶模态矩阵T ,并作如下变换
)()(t Tz t x = (4.29)
可将式(4.9)转化为解耦形式的状态方程
)()()(t q t z t z +Λ=', 0)0(=z (4.30) 其中
AT T 1-=Λ (4.31)
是对角矩阵,其对角线元素是A 的特征值,并且
[])()()(1t Hf t Bu T t q +=- (4.32)
对于较小的时间间隔Δt ,模态状态向量)(t z 可以表达为
[][][])()()ex p(2
1)()ex p()()(ex p )()(ex p )(0t q t t q t t t z t d q t d q t t z t t t t
t +?-Λ?+?-Λ??-Λ+-Λ=???-?-ττττττ (4.33)
联立式(4.29),(4.32)和(4.33),求解出状态向量)(t x
[])()(2
)()(t Hf t Bu t t t Td t x +?+
?-= (4.34) 其中 []?
??????-+?-+?-Λ?=?--)()(21)()exp()(1t t Hf t t Bu t t x T t t t d (4.35) 至此,瞬时最优控制问题转化为:在约束条件式(4.34)下求)(t J 为最小。
令哈密顿函数为
[]??????+?-?--++=)()(2)()()()()()()(x t Hf t Bu t t t Td t x t t Ru t u t Qx t H T T T λ~
(4.36) 这里,)(t λ仍为拉格朗日时变因子。
将哈密顿函数~
H 分别对)(t x ,)(t u 和)(t λ求偏微风,并令之为零,得出)(t J 最小的必要条件为 []????
?????+?+?-==?-=+)()(2)()(0)(2)(20)()(2t Hf t Bu t t t Td t x t B t t Ru t t Qx T λλ (4.37) 对于闭环系统,令
)()()(t x t P t =λ (4.38)
代入式(4.37),可求出控制力向量)(t u 为
)(2
)(1t Qx B R t t u T -?-
= (4.39) 对于闭-开环控制,令 )()()(t p t Px t +=λ (4.40)
代入式(4.37),可求出
Q B QBR t I P T 112
)8
(--?+-= (4.41) ??
?????+?-=)(2)()(t Hf t t t Td P t p (4.42) 将(4.40),(4.41)和(4.42)代入式(4.37)的第二式,可得出控制力向量。 对于开环控制,令
)()(t P t =λ (4.43)
代入式(4.37),可求出控制力向量)(t u 为
??
?????+?-?+?-=-)(2)()4(2)(12
t Hf t t t Td BTQ QB B t R t t u T (4.44) 5.独立模态空间控制(independent modal space control )
对于受控结构的运动方程式(4.6),假设系统具有正交阻尼,并用Φ表示经典模态矩阵。应用模态转换
)()(t q t y Φ= (4.45)
并将其代入式(4.6),得到下列解耦的模态方程:
n j t p t v t q k t q c t q
m j j j j j j j j ,,2,1),()()()()( =+=++ (4.46) 其中j 表示第j 阶模态,且模态控制向量
[]T
n t v t v t v )()()(1 = (4.47) 与实际控制向量)(t u 之间的变换关系式为
)()()()(t Lu t u t D t v T =Φ= (4.48)
如果设
)()()(21t q
g t q g t v j j j j j += (4.49) 则至此,式(4.46)的各方程已相互独立,或者说,控制算法已转化为“独立模态空间”的控制问题。
模态控制力)(t v 可以选用适当的控制算法决定,并再通过式(4.48)求出控制向量)(t u 。
6.H ∞状态反馈控制
∞H 控制在具体应用时有多种算法,常用的有状态反馈控制算法。
考虑状态方程式(4.9)所表示的系统,并定义控制输出为
??
????ψ=)()()(t u t x t z (4.50) 式中Ψ是权矩阵。
控制额目的是要保证控制输出(假设零初始条件)满足下式条件:
200)()()()(γ≤??∞
∞
dt t f t f dt
t z t z T T (4.51)
上式相当于从)(t f 到)(t z 之间的传递函数的无穷大模小于γ,即
B 图1-1 振动控制的基本原理 (1)电动台的工作原理及框图 载流导体载磁场中受电磁力的作用而运动,根据电磁学的基本原理,一段载流元dI 放在磁场中(见图1-1)所受的电磁力可用下式表示Df=BId ?sin (d ?^B )式中B 一载流导体所处磁场的磁通(Gs )I 一载流导体的电流有效值 (A )dI ^B 一电流元与V 的夹角载振动台的设计中d ?^B=90°则sin (d ?^B )=sin90°=1∴df=BId ?整个驱动动圈的线圈式由无数小电流元组成的因此动圈所受的力F 为 F=∫? 0BId ?=IB ?………(1-1) ?…………动圈的有效长度 显然,在上式中,当振动台与定型时B ?为定值则F αI 因此,当动圈上通过的电流I 以正弦规律变化,即产生所谓振动。 由(1-1)式可知 振动台的激振力大小取决于I 、B 、?三个参数的打小,气隙磁通B 的大小式不能无限制地增加的,当采取恒磁场时,B 一般为6000Gs 一7000Gs ,当采用单磁场励磁时,B 一般在13000Gs 左右,采用双
图1-2 动台体体积大小限制。如果要增加激振力,则要增加动圈驱动电流I 的大小,而I是由功率放大器提供的,也就要增大功率放大器输出的大小。 为了表明由功率化为激振力的能力,人们常用数来表达,它定义为每产生一公斤的激振力所需功率放大器的瓦数,称为该振动台的力常数。 在振动台的应用中常用下列量纲 I…………安培(A) ?…………厘米(cm) B…………高斯(Gs) F…………公斤力(kgf) 则(1-1)改写成 F=2x10-7IB ?……………………1—2 (2)电动台的框图及各部件作用 电动台的框图如图1-2所示
硕士研究生 非笔试课程考核报告 (以论文或调研报告等形式考核用) 2013 至 2014 学年 第 1 学期 考核课程: 防灾减灾学 提交日期: 2013 年 12月 20 日 姓 名 程伟伟 学 号 2012010305 年 级 研二 专 业 防灾减灾及防护工程 所在学院 土木工程学院 山东建筑大学研究生处制 考核成绩 考核人
结构振动的主动控制技术 程伟伟 (山东建筑大学土木工程学院,济南,250101) 摘要:主动控制是一项积极主动的智能化措施,是根据外界刺激和结构响应预估计所需的控制力,从而输入能量驱使作动器施加控制力或调节控制器性能参数,达到减震效果。对目前的主动控制技术的研究现状作了简要评述,阐述了振动主动控制中主要控制方法和策略及应用中存在的问题,并提出了振动主动控制技术的发展趋势。 Abstraction:Active Control is an intelligent proactive measures, are needed to control the pre-estimate based on external stimuli and response structures, thereby driving the input energy is applied to the actuator control or regulate the controller performance parameters to achieve the damping effect. The current research status of active control techniques are briefly reviewed, elaborated mainly active vibration control and application control methods and strategies for the problems and proposed active vibration control technology trends. 关键词:主动控制作动器与传感器控制方法 引言:主动控制是指在振动控制过程中,经过实时计算,进而驱动作动器对控制目标施加一定的影响,达到抑制或消除振动的目的。其控制效果好,适应性强,正越来越受到人们的重视。近几年,随着科学技术的发展,特别是在计算机技术和测控技术的推动下,振动主动控制有了长足进步。主动控制在越来越多的实际工程中应用的越来越多。 正文 地震给世界各国人民造成了巨大的灾害,土木工程结构振动控制是工程结构抗震领域的新课题。姚治平将振动控制与土木工程相结合,首次提出了土木工程结构振动控制的概念。对有效减轻地震灾害有着重要的现实意义。主动控制在声学中并不是一个新概念,早在20世纪30年代,Paul Lueg 就提出了利用主动噪声抵消发代替被动噪声控制,对低频噪声进行控制。由于振动传递远比声音的传递复杂得多,致使主动振动控制的研究共走进展相对较慢,直到二次世界大战后的军备竞赛才促使其迅速发展。纵观主动振动控制的发展过程,将其划分为重点突破、广泛探索和重点攻关三个阶段。从20世纪50年年代起,主动控制取得了三项突破,即实现了机翼颤振的主动阻尼没提高了飞机航速;主动振动控制提供了超静环境,保证惯导系统满足核潜艇和洲际导弹导航的进度要求;磁浮轴承控制离心机转子成功,创造出分离铀同位素的新工艺。20世纪50-60年代主动振动控制发展的重点突破阶段。上述成就迅速吸引了众多的专家研究这项技术。于是20世纪70年代变成为空广泛探索主动振动控制在各个工程领域应用的阶段。进入20世纪80年代,主动振动技术在几个工程领域的应用前景相当明朗,其中就有控制高挠性土木工程结构振动在、控制,于是,主动振动控制研究进入重点攻关阶段。目前,对主动控制的研究主要集中在:传感器、致动器、动力学建模及其振动控制、传感器/致动器的优化配置等几方面。控制技术分为主动、被动和半主动等类型。主动控制是指在振动控制过程中,根据所检测的振动信号,应用一定的控制策略,经过计算,进而驱动作动器为控制目标施加一定的影响,达到抑制或消除振动的目的。其控制效果好,适应性强,正越来越受到人们的重视。本文主要介绍主动控制技术的发展和展望。 主动控制是一种需要额外能量的控制技术,它与被动控制的根本区别是有无额外能量的消耗,是否具有完整的反馈控制回路。与被动控制相比,主动控制技术复杂、造价昂贵、维护要求高,但对于高层建筑或抗震设防要求高的建筑来说,主动控制具有更好的控制效果。主动控制装置大体上由仪器测量系统(传感器)、控制系统(控制器)、动力驱动系统(作动器)等组成。传感器测量姐欧股的动力响应或外部激励信息;控制器处理传感器测量的信息,实现所需的空置力,并输出作动器
振动主动控制 振动控制是振动工程领域内的一个重要分文,是振动研究的出发点与归宿。从广义上说,振动控制包括两方面的内容‘一是振动的利用,充分利用有利的扳动,如各类振动机器等;另一是振动的抑制,尽量减小有害的振动,因为振动加速运转机械的磨损,缩短产品与结构的寿命,使人易于疲劳,侵仪器易于失灵。本书所讲的振动控制,只是振动的如制。 振动控制的任务就是通过一定的手段位受控对象的振动水平满足人们的预定要求。 这里,受控对象是各类产品、结构或系统的统称。为达到振动控制的目的所采取的手段,通常需经历如下五个环节: (1)确定振源特性与振动特征:确定振源的位置,激励的特性(简谐件、周期性、窄带随机性或宽带随机性)。振动特征(受迫型、白激型或参微型)等,因为不同性质的振源引起的振动,其解决的方法也不同。 (2)确定振动控制水平,即确定衡量振动水平的量及其指标,这些量可以是位移、速度或加速度、应力等,也可以是其最大值或均方根值。 (3)确定振动控制方法:不同的振动控制方法其适用性不同,这些方法包括隔振、吸振、阻振、消振及结构修改等。 (4)进行分析与设计:包括建立受控对象与控制装置(如吸振器、隔振器、阻尼器等)的力学模型、进行振动分析,以及对控制装置参数与结构的设计。 (5)实现:将控制装置的结构与参数从设计转化为实物。可实现性是振动控制研究中必须注意的重要问题。 按所采用的抑制振动手段区分,振动控制方法有五种: (1)消振:即消除或减弱振源,这是治本的方法。因为受控对象的响应是由根源(激励)引起的,外因消除或减弱,响应自然也消除或减弱。如对不平衡的刚性或柔性转子,采用动平衡方法消除或减弱它们在转动时因质量不平衡出现的离心力及力矩;如对高烟囱、热交换器等结构,由于卡门涡引起的流激振动,
一、主动控制简介 1.概念:结构主动控制需要实时测量结构反应或环境干扰,采用现代控制理论的主动控制算法在精确的结构模型基础上运算和决策最优控制力,最后作动器在很大的外部能量输入下实现最优控制力。 2.特点:主动控制需要实时测量结构反应或环境干扰,是一种需要额外能量的控制技术,它与被动控制的根本区别是有无额外能量的消耗。 3.优缺点:主动控制具有提高建筑物的抵抗不确定性地面运动,减少输入的干扰力,以及在地震时候自动地调整结构动力特征等能力,特别是在处理结构的风振反应具有良好的控制效果,与被动控制相比,主动控制具有更好的控制效果。但是,主动控制实际应用价格昂贵,在实际应用过程中也会存与其它控制理论相同的问题,控制技术复杂、造价昂贵、维护要求高。 4.组成:传感器、控制器、作动器 5.工作方式:开环、闭环、开闭环。 二、简单回顾主动控制的应用与MATLAB应用 1.主动变刚度AVS控制装置 工作原理:首先将结构的反应反馈至控制器,控制器按照事先设定好的控制算法并结合结构的响应,判断装置的刚度状态,然后将控制信号发送至电液伺服阀以操纵其开关状态,实现不同的变刚度状态。 锁定状态(ON):电液伺服阀阀门关闭,双出杆活塞与液压缸之间没有相对位移,斜撑的相对变形与结构层变形相同,此时结构附加一个刚度; 打开状态(OFF):电液伺服阀阀门打开,双出杆活塞与液压缸之间有相对位移,液压缸的压力差使得液体发生流动,此过程中产生粘滞阻尼,此时结构附加一个阻尼。 示意图如下: 2. 主动变阻尼AVD控制装置 工作原理:变孔径阻尼器以传统的液压流体阻尼器为基础,利用控制阀的开孔率调整粘性油对活塞的运动阻力,并将这种阻力通过活塞传递给结构,从而实现为结构提供阻尼的目的。关闭状态(ON):开孔率一定,液体的流动速度受限,流动速度越小,产生的粘滞阻尼力越大,开孔率最小时,提供最大阻尼力,此时成为ON状态; 打开状态(OFF):控制阀完全打开,由于液体的粘滞性可提供最小阻尼力。 示意图如下:
受电弓振动主动控制研究现状分析 □宋一凡郭德勇梁继国 【内容摘要】电力机车高速行驶时,弓网振动将导致弓网接触力产生波动进而引起机车受流不良,降低机车运行性能甚至会损害机车电气设备。受电弓主动控制可以有效减小弓网振动,本文从控制算法方面介绍了受电弓振动主动控制的研 究现状,总结分析了近年来国内外学者在这方面取得的研究成果以及各种控制算法的优缺点,并展望了未来受电 弓振动主动控制的发展趋势和研究方向。 【关键词】电力机车;受电弓振动;主动控制;控制算法 【基金项目】本文为东北林业大学国家级大学生创新实验项目“电动载货车高速路随动取电装置”(编号:201810225079)资助项目研究成果。 【作者单位】宋一凡、郭德勇,东北林业大学交通学院;梁继国,吉林省辉南经营局 一、引言 受电弓与接触网接触受流牵引电力机车运行,空气动力、接触网的波传播和波反射、不规则风和轮轨状况等因素将引起弓网振动,而弓网振动将降低机车受流质量、加剧弓网磨损、增大运行噪声。随着机车运行时速提高,弓网振动带来的危害也将加剧,弓网振动成为限制电力机车提速的重要因素。目前,主要有两种方法解决振动问题:一是提高接触网刚度或增大接触线张力,二是增大弓网接触力。这两种方法均在一定程度上减小了弓网振动,但第一种需要更换接触网,成本巨大;第二种加剧弓网磨损的同时增大了安全隐患[1]。研究人员不得不寻找新的途径来解决振动问题,早期研究者提出利用主动控制技术来提高受电弓的跟随性。进行可控受电弓的研究渐渐成为了机车受电弓研究的一个重要课题。 对于受电弓振动主动控制的研究,欧洲和日本学者起步较早,2003年7月速度可达230km/h的振动主动控制受电弓在德国就已试验成功[2]。而我国学者对此类课题的研究起步较晚,发展尚停留在实验室阶段。尽管国内外已有很多研究涉及这一领域,但大多仅停留在控制策略的提出和数值仿真验证,难以在实践中得到应用,实现的瓶颈主要在于作动器的选择和能量供应问题,以及接触力反馈信号的实用性。本文从控制算法和作动器两个方面来介绍受电弓主动控制的研究现状和存在的问题,以期为受电弓主动控制的研究提供一些思路。 二、控制算法 控制算法作为主动控制的核心对其应有如下要求:所需控制信息量少,计算速度快,输出信息易于执行,复杂控制具有一定的自适应性。国内外对控制算法进行了大量研究,大体可分为以下五类(列出)。 (一)模糊控制。模糊控制自第一次成功应用以来,模糊控制理论已得到突飞猛进的发展,解决了许多现实问题。模糊控制具有很强的鲁棒性,适用于工作条件下具有非线性和参数时变性的受电弓,因此受电弓的模糊控制受到了学者的关注。 (二)变结构控制。由于变结构控制具有极强的鲁棒性且实现容易,尤其可以良好地自适应系统干扰,适用于线性和非线性,可有效处理弓网振动问题。但其缺点是当变结构控制到达切换面后受时滞和惯性的影响在滑模面附近来回穿梭,引起变结构振颤。变结构控制可分为两类,一类是非滑模变结构控制,另一类是滑模变结构控制。研究者对这两种变结构控制均有应用。 (三)线性二次型控制。线性二次型控制适用于时变系统,控制能量低,计算精度高,能有效处理扰动信号和测量噪声问题且易于构成闭环最优控制,可作为处理弓网振动问题的有效途径。 (四)预测控制。预测控制应具备以下三项基本原理:预测模型、滚动优化和反馈校正。线性模型的预测控制算法已非常成熟,但实际所需的控制系统大多是非线性的,因此现在预测控制的研究重点就成为非线性模型预测控制,弓网振动模型便是一种典型的非线性模型,相关研究者也将非线性模型预测控制用于受电弓的主动控制。 Mihai-Florin Taran等提出了一种基于模型预测控制策略的接触力闭环控制方法。预测控制使用有限变量构造的有限滚动时域估计,使用系统模型的离散时间公式,利用接触网模型中时变表达式得到离散模型,并提出二阶离散化方法,增设积分以消除稳态误差,得到线性时变模型。将控制目标转化为一个凸函数以表达误差的权重和对有限滚动时域估计的控制力[3]。任志玲根据弓网模型和接触力数据,利用预测控制技术预测下一时刻接触力,将预测值与理论值比较计算误差,模型预测控制器通过电流变阻尼器将计算结果转换为接触力的控制输入量。实验结果表明能够有效提高弓网耦合质量[4]。 (五)神经网络模型。刘仕兵等将NARMA-L2模型应用到弓网振动控制系统中并给出了控制方案:控制系统分为系统辨识部分和控制部分。系统识别部分采用在线辨识,响应快迟滞小,增加了系统的实时性。系统首先从被控制系统 · 36 ·
现代控制理论基础 上机实验报告之一 亚微米超精密车床振动控制系统的状态空间法设计
一:工程背景介绍 超精密机床是实现超精密加工的关键设备,而环境振动又是影响超精密加工精度的重要因素。为了充分隔离基础振动对超精密机床的影响,目前国内外均采用空气弹簧作为隔振元件,并取得了一定的效果,但是这属于被动隔振,这类隔振系统的固有频率一般在2Hz左右。 这种被动隔振方法难以满足超精密加工对隔振系统的要求。为了解决这个问题,有必要研究被动隔振和主动隔振控制相结合的混合控制技术。其中,主动隔振控制系统采用状态空间法设计。 二:实验目的 通过本次上机实验,使同学们熟练掌握: 1. 控制系统机理建模; 2. 时域性能指标与极点配置的关系; 3. 状态反馈控制律设计; 4. MATLAB语言的应用。 三:工程背景的物理描述 图1
图1表示了亚微米超精密车床隔振控制系统的结构原理,其中被动隔振元件为空气弹簧,主动隔振元件为采用状态反馈控制策略的电磁作动器。此为一个单自由度振动系统,空气弹簧具有一般弹性支承的低通滤波特性,其主要作用是隔离较高频率的基础振动,并支承机床系统。主动隔振系统具有高通滤波特性,其主要作用是有效地隔离较低频率的基础振动。主、被动隔振系统相结合可有效地隔离整个频率范围内的振动。 经物理过程分析得出床身质量的运动方程为: p a 0m s F F ++= (1) F ——空气弹簧所产生的被动控制力。 F ——作动器所产生的主动控制力。 假设空气弹簧内为绝热过程,则被动控制力可以表示为: p 0r r r e e {1[/()]}n F c y k y pV V A y A =++-+ (2) V ——标准压力下的空气弹簧体积; 0y s s =-——相对位移(被控制量); p ——空气弹簧的参考压力; A ——参考压力下单一弹簧的面积; e r 4A A =——参考压力下空气弹簧的总面积; n ——绝热系数。 电磁作动器的主动控制力与电枢电流、磁场的磁通量密度及永久磁铁和电磁铁之间的间隙面积有关,这一关系具有强非线性。 由于系统工作在微振动状况,且在低于作动器截止频率的低频范围内,因此主动控制力可近似线性化地表示为: a e a F k I = (3) e k ——力-电流转换系数; I ——电枢电流。 其中,电枢电流I 满足微分方程: a a a (,)()L I R I E Iyu t ++= (4) L ——控制回路电枢电感系数; R ——控制回路电枢电阻; E ——控制回路反电动势; u ——控制电压。 四:闭环系统的性能指标要求 要求闭环系统单位阶跃响应的超调量不大于5%,过渡过程时间不大于0.5 秒(0.02?=)。 五:车床振动系统的开环状态空间模型的建立
近年来随着各种高科技产业制程越来越精 密,相关的仪器设备对于环境振动隔离的要求也越来越严格。在半导体产业有许多设备都必须考虑降低环境振动,如曝光设备scanner、stepper,检验设备SEM、SPM、TEM、椭圆偏光仪等等,几乎每一台设备都需要安装隔振系统。 传统被动式隔振系统多半是以气垫弹簧或者是钢圈弹簧阻成,有些会再加入阻尼以降低自然频率的共振效果。适当的设计通常可以隔离频率在3、4 Hz以上的振动,而且越高频率的振动隔离效果越佳,但是却会放大低频率的振动,尤其是隔振系统自然频率的振动。对于结构第一自然频率超过20、30 Hz的多数仪器设备而言,这些无法隔离而传递上来的低频率地板振动在经过设备仪器结构体时,已经大幅衰弱而没有明显的影响。然而对于现代微奈米等
级的精密设备仪器而言,许多都对2、3 Hz的低频率振动十分敏感,变化缓慢的低频率振动可能对于承载大质量组件的梁结构造成类似静态弯曲的明显位移,造成系统内各个组件的相对运动,严重影响其定位的精度。例如,对于长行程的雷射量测应用,会产生光程的扰动;对于SPM(Scanning Probe Microscope)会使光学影像模糊;或是造成电子束偏离预期的路径等等。因此,如何有效隔离低频率振动,以降低对超精密仪器设备的影响,一直是高科技产业所关切的问题。在整个科技界朝向微小化的过程中,硬盘储存密度越来越大、半导体制程的线宽越来越小、所有光学系统分辨率越来越高,这些发展将使得低频率微振动的主动控制研究益发显得重要。因此,国内自行研发一个符合微奈米等级之精密仪器设备振动规范需求的主动式隔振系统,实为高科技产业所迫切需要的。