单片机自动控制交通灯设计大纲第一部分:关于交通灯的发展 1.交通灯研究的背景和意义 2.交通灯国内外发展概况 第二部分:系统工作原理及设计方案 1.交通灯的工作原理 2.交通灯总体设计方案 第三部分:硬件系统设计 1.硬件系统组成 2.单片机最小系统 3.信号显示驱动电路 4.键盘输入电路 第四部分:交通灯系统详细设计 1.软件总体设计思想 2.交通控制算法实现 3.系统初始化模块 4.信息显示模块 4.1信号灯模块 4.2 LED倒计时显示子程序 5.键盘扫描模块 第五部分:调式总结
第一章绪论 1.1 交通灯研究的背景和意义 交通是城市经济活动的命脉,对城市经济发展、人民生活水平的提高起着十分重要的作用。城市交通问题是困扰城市发展、制约城市经济建设的重要因素。城市道路增长的有限与车辆增加的无限这一对矛盾是导致城市交通拥挤的根本原因。城市街道网络上的交通容量的不断增加,表明车辆对道路容量的要求仍然很高,短期内还不可能改变。自从开始使用计算机控制系统后,不管在控制硬件里取得什么样的实际进展,交通控制领域的控制逻辑方面始终没能取得重大突破。 可以肯定的说,对于减轻交通拥塞及其副作用一特别是对于大的交通网络而言,仍然缺乏一种真正的交通响应控制策略。计算机硬件能力与控制软件能力很不相符,由此造成的影响是很多交通控制策略根本不能实现。在少数几个例子中,一些新的控制策略确实能得以实现,但他们却没能对早期的控制策略进行改进。由于缺乏能提高交通状况、特别是缺乏拥塞网络交通状况的实时控制策略,几乎可以说真正成熟的控制策略仍然不存在.智能化和集成化是城市交通信号控制系统的发展趋势和研究前沿,而针对交通系统规模复杂性特征的控制结构和针对城市交通瓶颈问题并代表智能决策的阻塞处理则是智能交通控制优化管理的关键和突破口。因此,研究基于智能集成的城市交通信号控制系统具有相当的学术价值和实用价值。把智能控制引入到城市交通控制系统中,未来的城市交通控制系统才能适应城市交通的发展。从长远来看该研究具有巨大的现实意义。 1.2 交通灯国内外发展概况 随着经济的发展,城市现代化程度不断提高,交通需求和交通量迅速增长,城市交通网络中交通拥挤日益严重,道路运输所带来的交通拥堵、交通事故和环境污染等负面效应也日益突出,逐步成为经济和社会发展中的全球性共同问题。交通问题已经日益成为世界性的难题,城市交通事故、交通阻塞和交通污染问题愈加突出。为了解决车和路的矛盾,常用的有两种方法:一是控制需求,最直接的办法就是限制车辆的增加;二是增加供给,也就是修路。但是这两个办法都有其局限性。交通是社会发展和人民生活水平提高的基本条件,经济的发展必然带来出行的增加,而且在我国汽车工业正处在起步阶段的时期,因此限制车辆的增加不是解决问题的好方法。而采取增加供给,即大量修筑道路基础设施的方法,在资源、环境矛盾越来越突出的今天,面对越来越拥挤的交通,有限的源和财力
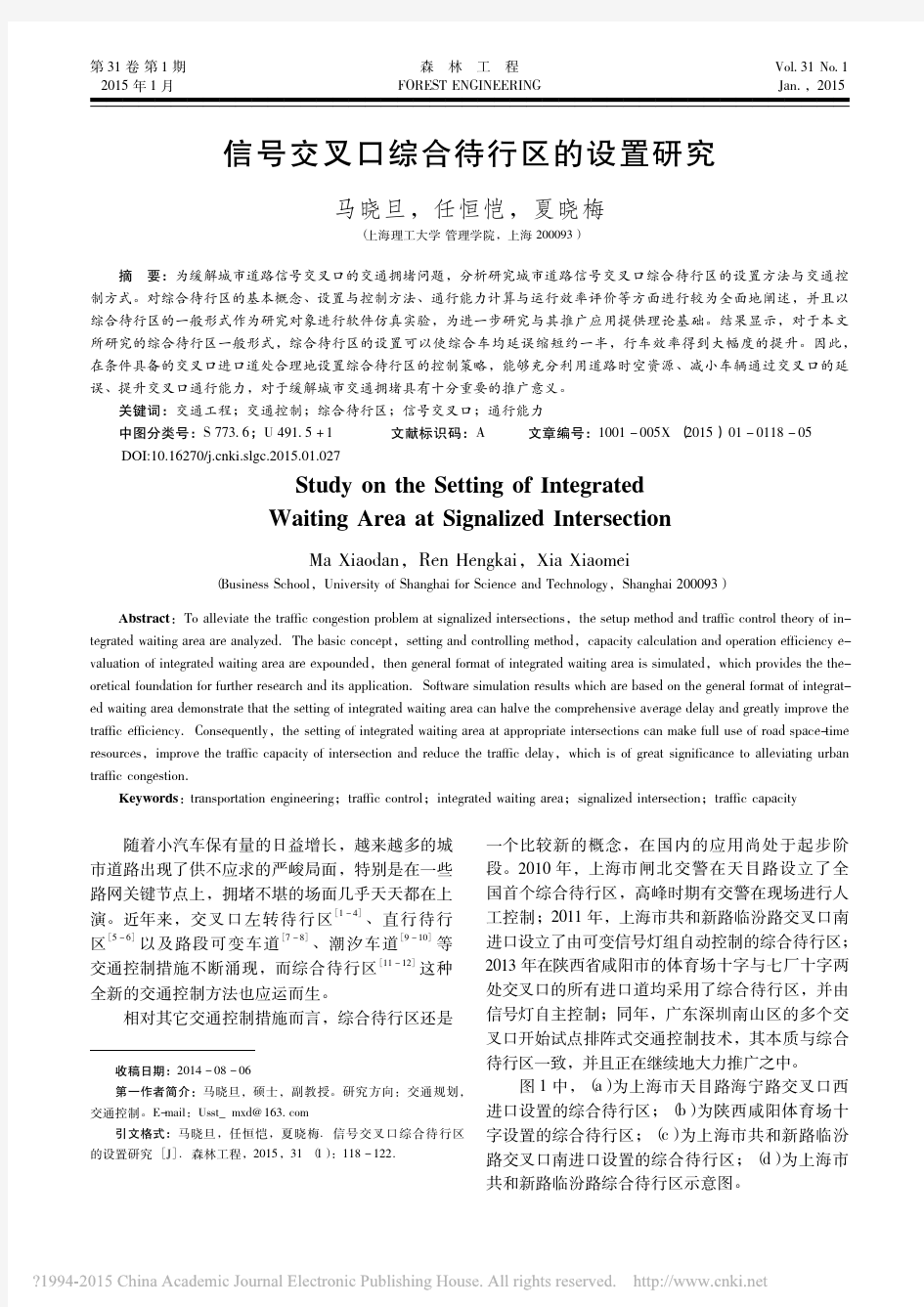
城市交通道路交叉路口存在的问题及解决办法 一、道路交叉口交通管理存在的问题 城市道路系统多为网状结构,其主要特点是道路网密度高,路网节点——交叉路口数量多,交叉路口已成为城市道路系统的重要组成部分,且近年来各城市普遍存在的交通混乱、交通阻塞、道路交通事故频发等交通问题,很多是由于交叉路口交通干扰严重及交叉路口通行能力极度下降造成。 红灯右转导致行人和骑车人在交叉口没有真正拥有道路使用权 我国常常直接引进西方先进的交通工程技术来解决国内我国常常直接引进西方先进的交通工程技术来解决国内的交通工程和管理问题,例如,汽车在交叉口红灯右转的规则但是忽略了国情:行人自行车和汽车都交织混杂在交叉路口,高架桥下交叉口十分宽广,行人和骑车人穿越道路所需时间比较长由于大交叉口完全由信号控制,虽然行人拥有宽敞醒目的人行道,但是红灯右转的规定导致右转车辆和过街行人之间的冲突,使得真正意义上供行人和骑车人使用的时间段几乎没有,也就是行人和骑车人在交叉口没有真正拥有道路使用权,在绿灯时间内由于右转车辆的阻挡,行人无法通过路口,不仅安全没有保障,还影响了汽车的通行行人只有靠自己的经验来判断,抓住时机穿越路口,这就是常见的行人骑车人违章现象,极易造成交通堵塞,甚至交通事故,极其危险。 人行道靠前便道窄导致行人路口等待通行信号 为了提高车辆的通行能力,在交叉口设计时,机动车停车线设置到路口顶端,人行道在路口中,行人在人行道上没有安全感例如四环某立交桥路口两方向的人行道在路中相连接;人行便道与自行车道常用铁栏杆隔离,只面向人行道角开口,拐角处多设置景物,留下非常窄的供行人等待的驻足区,并且没有清晰的标示左转行人在通过一边路口等待绿灯信号穿越另一边路口时,往往会停留在人行道的转弯处,阻挡了自行车道,又没有任何保护,极易与右转车辆发生冲突,明显地影响机动车通行。 交叉口旁其他设施过多形成安全隐患 随着城市地区供电高压线改为地下电缆,在道路两旁随处可见大大小小的变压器等电力设施,有些就建在交叉口边,另外,在北京城区大小交叉口人行便道上几乎都建有报刊亭这些设施既影响行人通行,也阻挡了右转车辆的视线,不仅对行人和驾驶员而且对设施本身都形成极大的安全隐患,就是一起交通事故,右转车辆撞倒变压器行人过街安全岛标志不明确,还与人行道有路缘,这样既不便于残疾人外出,也不便于自行车通行,还容易被占用行人往往在一个绿灯时段不能通过高架桥下的过街通道,在等待下一个绿灯信号时,没设置等待线,致使行人容易停靠太前与行驶的车辆距离太近不安全,同时也影响正常行驶的车辆。路口设计的随意性致使自行车违章 在高架桥下我国大都采取行人和自行车共用人行道,由于设置不合理导致自行车进入机动车道,影响车辆的通行速度,降低交叉口通行能力,并形成安全隐患以四环某立交桥为例,由于桥梁建设的缘故,桥下东西两边人行横道完全不对称,东边人行横道窄,靠近路口;西边人行道宽,远离路口对该路口进行了为期天的不同时段调查统计,两边自行车各为辆,违章统计结果见表 自行车道设计与骑车人违章的关系
交通管理与控制课程设 计十字交叉口信号配时
优化设计
公司内部档案编码:[OPPTR-OPPT28-OPPTL98-OPPNN08]
《交通管理与控制》课程设计
---------十字交叉口信号配时优化设计
姓名: xxxxxx 专业: 交通工程 班级: 08 级交通 2 班 学号: 08xxxxxxxx
1 基础资料收集 道路几何条件调查
红线宽度 每条机动车道宽度 绿化带宽度 非机动车道宽度 人行道宽度
红线宽度
每条机动车道宽度
绿化带宽度
每条非机动车宽度
人行道宽度
绿化道宽度
红线宽度
每条机动车宽度
非机动车道宽度
人行道宽度
绿化带宽度
说明: 1. 本图为学院北路与滏河大 街交叉口平面图 2. 比例
红线宽度 每条机动车道宽度 每条非机动车宽度 人行道宽度 绿化道宽度
学院北路与滏河大街交叉口平面图 交叉口现状图
图例 车行道 入口引道 绿化带 中央分隔带 机非分隔带
东西方向
南北方向
现状信号配时图
项目
单位
道路等级 断面形式 设计车速 路幅宽度 车道数 单车道宽
Km/h m
车道功能划 分
非机动车道 宽
m
人行道宽
m
交通条件调查
(1)交通量调查
平峰小时流量表 进口
交叉口几何条件调查表
东 进出 口口 次干道 一块板
35 25 12
进出口方向
西
南
进出进出
口口口口
次干道 主干道
三块板 一块板
35
50
35
45
2244
北 进出 口口 主干道 三块板
50 50 44
直 左 右
1个 直 行
直 左 直 右
2个 直 行
直 行 直 右 左
3个 直 行
直 行 直 左 直 右
3个 直 行
2
3
3
机动车
自行车
行人
简易交通信号灯控制器 1.主要技术指标与要求 1.定周控制:主干道绿灯45s,支干道绿灯25s; 2.每次由绿灯变为红灯时,应有5s黄灯作为过渡; 3.分别用绿、黄、红色发光二极管表示信号灯; 2.摘要 道路交通和我们息息相关,是我们日常生活的一部分。为了确保道路交通顺畅与安全,交通信号控制系统是用来自动控制十字路口红黄绿三色的交通灯。 简易交通信号灯控制器利用555秒脉冲发生器提供秒脉冲信号,通过CP输入。主控制器由两块74LS290组成一个80进制计数器,分别在45S,50S,75S,80S,通过驱动控制装置来控制主干道与支干道中绿、黄、红发光二极管的亮灭及其持续时间,从而实现对主干道与支干道交通信号的控制。 3.总体设计方案论证及选择 方案一:十字路口每个方向的绿、黄、红灯所亮的时间比例分别为9:1:5,所以,可以选择计数器为5s的脉冲。因为每5s一个时间单位,所以计数器的工作循环为16,应选择一个十六进制的计数器来控制,故选择74LS161四位异步二进制计数器,再加上相应控制器来配合,达到计数器分别在9、10、15、16翻转的目的。
方案二:本方案主要由主控制电路和秒脉冲发生器组成,其中主控制电路包括:主控制器、清零装置、驱动装置、信号灯装置及一些逻辑门。主控制器中采用两块74LS290二-五-十进制来实现八十进制计数器。秒脉冲发生器由555秒脉冲发生器负责提供脉冲信号。接通电源瞬间,清零装置将主控制器清零,紧接着,主干道绿灯和支干道红灯打开,其余主、支道灯关闭。秒脉冲传送到控制器,主控制电路在45s 到,50s到,75s到,80s到分别产生翻转信号,从而改变主、支道绿、黄、红灯的开闭持续时间,继而实现交通信号灯控制。 方案三:十字路口车辆通行情况只可能有4种情况,可以依次用S0=00,S1=01,S2=10,S3=11,L来记忆交通灯的工作情况。分别对这四种情况进行编码,得到转换图,显然这是一个四进制计数器,可以采用J-K触发器74LS107来构成,控制电路。 经过比较,我选择方案二,因为方案一中,主控制器用的是十六进制74LS161计数器,而交通灯信号控制周期T=80s,相比而言方案二更容易得到。而方案三中器件我不太熟悉,所以最终我选方案二。 4.设计方案的原理框图、总体电路图及说明 原理框图:
xxx交叉口现状分析和改造方案 摘要 通过对xxx交叉口的道路、交通和控制现状,主要是对其机动车通行能力,行车延误,行车速度,信号周期,和高峰小时的交通需求等进行定量和定量的分析,寻找干扰机动车通行的原因,以得到xxx交叉口拥堵的根本原因,提出综合性的改造措施,相应的改造方案和有关效益评价。近期尚未进行路口立交改造,但交通矛盾特别突出,为此设计尝试从交通需求管理和运输供应改善两个方面着手,以求比较合理的改善该交叉口的拥堵现状,提高该路段的服务水平。 关键词:交通量通行能力延误效益评价
Abstract This arti cl e t ri es t o fi nd out t he m ain reason wh y the m ot or vehi cl es travel t hrough t he art eri a t hrough t he anal ysi s of the runni ng and cont rolli ng st at us of the i nt ersecti on xxx, m ai nl y t he quali t ati ve and quantit ati ve anal ys i s of t he capacit y, t raffi c del a ys, speed, si gnal c ycl es, and the peak-hour t raffi c of t he road. Then we can get t he root caus es of j am s, the reasonabl e reform m eas ures, t he corresponding transform at i on program and the effect i veness eval uat ion. As the recent i nt ersecti on h as not yet been opt im iz ed and the t raffi c cont radi cti ons are serious t his art i cl e l a ys it s em phasis on the im provem ent of t raffi c dem and m anagem ent and t raffi c suppl y m anage m ent and im prove the l evel of servi ce of t he road i n hence. Key word:traffic quantity traffic capacity delays effectiveness evaluation
城市道路交叉口的优化 【摘要】:交叉口设计是城市道路设计的重要组成部分。为了提高城市道路交叉口通行能力和安全的前提下对城市道路交叉口优化设计提出了思路 【关键词】:城市道路;交叉口;优化设计 (一)现状 近20年来,我国城市获得了前所未有的发展。但是,一些城市所出现的交通拥挤堵塞问题也是空前严重的。随着现代化城市规模的不断扩张及机动车保有量的不断提高,交通堵塞、路口延误越来越成为城市发展的障碍。人们不断受到出行安全、交通拥堵等问题的困扰。为此,交通问题已经日益引发各城市政府的重视,并成为民众关心的焦点。 (二)现状的分析 道路交叉口是城市交通的咽喉,是道路网的重要组成部分, 各向道路在交叉口相互连接而构成路网,以沟通各向交通需要。一般情况下城市道路的车辆通行能力不是取决于道路区间段,而是道路交叉口,大部分城市道路交叉口还是平面交叉为主。在多数城市道路交叉口中,由于对道路路段、路口的几何设计、信号配置及路面构筑物等因素缺乏整体的考虑,交通工程设计不够协调,从而对交叉口交通产生不利影响,使之成为路网交通的瓶颈。从调查情况看,此类问题在城市道路交通阻塞点中占有相当大的比例,而合理、迅速地解决这类问题,对于缓解路网压力、疏解地区交通具有重要意义。 (三)方案探索与解决 下面就城市新建道路和原有道路的交叉口问题谈谈近年来平面交叉口持 续改进,优化探索方面的新方法。 Ⅰ.城市新建道路平面交叉口优化设计 交叉口位置的选择是确定一个理想和最佳交叉门的首要条件。交叉口的位置一般根据交叉道路的等级、计算行车速度、转向车流的分布和交通量、自然条件和地形条件等因素选定,重点应考虑以下几个方面: ①平交口立面设计 平交口立面设计是平交口设计的一个很重要的部分。立面设计主要足依据纵
实用标准文案
《交通管理与控制》课程设计
---------十字交叉口信号配时优化设计
姓名: xxxxxx 专业: 交通工程 班级: 08 级交通 2 班 学号: 08xxxxxxxx
精彩文档
1 基础资料收集
1.1 道路几何条件调查
交叉口现状图
红线宽度 每条机动车道宽度 绿化带宽度 非机动车道宽度 人行道宽度
实用标准文案
红线宽度 每条机动车道宽度 绿化带宽度 每条非机动车宽度 人行道宽度 绿化道宽度
红线宽度 每条机动车宽度 非机动车道宽度 人行道宽度 绿化带宽度
说明: 1. 本图为学院北路与滏河大 街交叉口平面图 2. 比例
红线宽度 每条机动车道宽度 每条非机动车宽度 人行道宽度 绿化道宽度
学院北路与滏河大街交叉口平面图
图例 车行道 入口引道 绿化带 中央分隔带 机非分隔带
精彩文档
实用标准文案
东西方向
南北方向
现状信号配时图
项目
单位
道路等级 断面形式 设计车速 路幅宽度
车道数 单车道宽
Km/h m
车道功能划分
非机动车道宽
m
人行道宽
m
1.2 交通条件调查
(1)交通量调查
平峰小时流量表
进口
左
东
直
右
左
西
直
右
左 南
直
交叉口几何条件调查表
东
进口 出口
次干道
一块板
35
25
1
2
3.0 3.0
直左 1 个 右 直行
3.5 2
进出口方向
西
南
进口 出口 进口 出口
次干道
主干道
三块板
一块板
35
50
35
45
2
2
4
4
3.0 3.0 3.0 3.0
直 左 2个 直右 直行
直行 直右
左
3个 直行
3.5
4.5
3.5
3
北
进口 出口
主干道
三块板
50
50
4
4
3.0 3.0
直行 直左 直右
3个 直行
4.5
3
机动车 15 154 43 245 485 311 292 672
自行车 24 99 12 43 93 143 18 142
行人 ---44 ------87 ------78
精彩文档
交通信号灯的设计方法 设计任务与要求 设计一个十字路口的交通信号灯操纵电路,要求甲车道和乙车道两条交叉道路上的车交替运行。 要求黄灯先亮5秒,才能变换行车道。 黄灯亮时,要求每秒钟闪亮一次。 实验设备 数字双踪示波器 74LS00、74LS20、74LS74、74LS153、74LS163、74LS138、NE555、发光二极管、电阻、电容 实验原理与实验电路 实验原理简介 实验电路要紧由操纵器、定时器、译码器和秒脉冲信号发生器等部分组成。秒脉冲发生器是该系统中定时器和操纵器的标准时钟信号源,译码器输出组信号灯的操纵信号,经驱动电路后驱动信号灯工作,操纵器是系统的要紧部分,由它操纵定时器和译码器的工作。 下面简要介绍个操纵信号的意义: TL:表示甲车道或乙车道绿灯亮的时刻间隔是25秒,即两车道正常通行的时刻间隔。定时器时刻到,TL=1,否则,TL=0。 TY:表示黄灯亮的时刻间隔是5秒,定时时刻到,TY=1.,否则,TY =0。 ST:表示定时器到了规定的时刻后,由操纵器发出状态转换信号。由他操纵定时器开始下个工作状态的定时。 AG=1:表示甲车道绿灯亮;BG=1:乙车道绿灯亮; AY=1:表示甲车道黄灯亮;BG=1:乙车道黄灯亮; AR=1:表示甲车道红灯亮;BR=1:乙车道红灯亮; 假设交通信号灯由四种状态组成:
第一种状态:甲车道绿灯亮,乙车道红灯亮。表示甲车道的车辆承诺通行,乙车道的车辆禁止通行。绿灯亮足够时刻间隔TL时,操纵器发出状态信号ST,转到下一个工作状态。 二种状态:甲车道黄灯亮,乙车道红灯亮。表示甲车道上为过停车线的车辆停止通行,已过停车线的车辆连续通行,乙车道禁止通行。黄灯亮足够的时刻间隔TY时,操纵器发出状态转换信号ST,转到下一个工作状态。 三种状态:甲车道红灯亮,乙车道黄灯亮。表示甲车道禁止通行,乙车道的车辆能够通过。绿灯亮足够规定时刻间隔时,操纵器发出状态转换信号ST,转到下一工作状态。 四种状态:甲车道红灯来亮,乙车道黄灯亮。表示甲车道禁止通行,乙车道未过停车线的车辆停止通行,已过停车线的车辆连续通行。黄灯亮足规定的时刻间隔TY时,操纵器发出状态转换信号ST,系统又转换到第一种工作状态。 通信号灯以上四种工作状态是由操纵器进行操纵的。设操纵器的四种状态编码为00、01、11、10,分不用S0、S1、S2、S3表示,则操纵器的工作状态即功能表如下所示:
干涉区 干涉区的概念 机器人的控制点TCP 到达某干涉区域的内侧或外侧时,可以输出状态信号(内侧为ON,外侧为OFF)。 机器人进入此区域时,相应的输入信号就被检测(如:禁止进入信号),只要有一个输入信号,机器人立即停止,处于等待状态,直到这个信号被清除。 I/O 部分进行这项处理工作。 干涉区的形式 干涉区最多可设定32,其形式可以从以下二种中选择: ? 立方体干涉区? 轴干涉区 立方体干涉区 立方体干涉区是与基座坐标、机器人坐标、用户坐标中任一坐标轴平行的立方体。控制柜对机器人控制点进行判断,判断是在干涉区内还是干涉区外,并把判断情况以信号方式输出。立方体干涉区作为基座坐标系或用户坐标系的平行的区域设定。
轴干涉区 轴干涉区,是指判断各轴当前位置并输出信号的功能。设定各轴正方向、负方向各自动作区域的最大值和最小值,判断各轴当前值是在区域内侧或外侧,并将该状态作为信号输出。 (ON: 区域内, OFF: 区域外) 干涉区的建立方法 立方体干涉区的建立方法 立方体干涉区的设定方法有以下3种: 输入立方体的坐标值 输入立方体坐标的最大值和最小值。 具体操作步骤参考操作要领书 10-22。 示教顶点 用轴操作键把机器人移到立方体的最大/最小位置。
具体操作步骤参考操作要领书 10-25。 输入立方体边长并示教中心点 输入立方体的三边边长(轴长)数值后,用轴操作键把机器人移到中心点。 具体操作步骤参考操作要领书 10-26。 轴干涉区的建立方法 数值输入轴数据 具体操作步骤参考操作要领书 10-27。 用轴操作键移动机器人设定轴数据 具体操作步骤参考操作要领书 10-29。
交通信号灯控制电路 一、设计任务与要求 1.设计一个十字路口的交通信号灯控制电路,要求甲车道和乙车道两条交叉道路上的车交替运行。 2.要求黄灯先亮5秒,才能变换行车道。 3.黄灯亮时,要求每秒钟闪亮一次。 二、实验设备 1.数字双踪示波器 2.74LS00、74LS20、74LS74、74LS153、74LS163、74LS138、NE555、发光二极管、电阻、电容 三、实验原理与实验电路 1.实验原理简介 实验电路主要由控制器、定时器、译码器和秒脉冲信号发生器等部分组成。秒脉冲发生器是该系统中定时器和控制器的标准时钟信号源,译码器输出组信号灯的控制信号,经驱动电路后驱动信号灯工作,控制器是系统的主要部分,由它控制定时器和译码器的工作。 下面简要介绍个控制信号的意义: TL:表示甲车道或乙车道绿灯亮的时间间隔是25秒,即两车道正常通行的时间间隔。 定时器时间到,TL=1,否则,TL=0。 TY:表示黄灯亮的时间间隔是5秒,定时时间到,TY=1.,否则,TY=0。 ST:表示定时器到了规定的时间后,由控制器发出状态转换信号。由他控制定时器开始下个工作状态的定时。 AG=1:表示甲车道绿灯亮;BG=1:乙车道绿灯亮; AY=1:表示甲车道黄灯亮;BG=1:乙车道黄灯亮; AR=1:表示甲车道红灯亮;BR=1:乙车道红灯亮; 假设交通信号灯由四种状态组成: 第一种状态:甲车道绿灯亮,乙车道红灯亮。表示甲车道的车辆允许通行,乙车道的车辆禁止通行。绿灯亮足够时间间隔TL时,控制器发出状态信号ST,转到下一个工作状态。 二种状态:甲车道黄灯亮,乙车道红灯亮。表示甲车道上为过停车线的车辆停止通行,已过停车线的车辆继续通行,乙车道禁止通行。黄灯亮足够的时间间隔TY时,控制器发出状态转换信号ST,转到下一个工作状态。 三种状态:甲车道红灯亮,乙车道黄灯亮。表示甲车道禁止通行,乙车道的车辆可以通过。绿灯亮足够规定时间间隔时,控制器发出状态转换信号ST,转到下一工作状态。 四种状态:甲车道红灯来亮,乙车道黄灯亮。表示甲车道禁止通行,乙车道未过停车线的车辆停止通行,已过停车线的车辆继续通行。黄灯亮足规定的时间间隔TY时,控制器发出状态转换信号ST,系统又转换到第一种工作状态。 通信号灯以上四种工作状态是由控制器进行控制的。设控制器的四种状态编码为00、
华侨大学电子工程系 基于FPGA的交通信号灯 课程设计报告 设计课题:交通信号灯设计 姓名:潘申欣、崔冰、陈孔滨 专业:10级集成电路设计与集成系统 学号:1015251023、1015251005、1015251003日期:2013年4月14日—2013年4月26日指导教师:傅文渊
目录 摘要 一、设计的任务与要求 (4) 1、任务与要求 (4) 2、系统原理 (5) 3、创新部分 (5) 二、系统顶层原理图 (6) 三、各功能模块叙述 (6) 1、码转换模块A (6) 2、数据产生模块 (8) 3、数据存储模块 (10) 4、4选1多路选择器 (12) 5、时钟产生模块 (13) 6、总控制模块 (15) 7、码转换模块B (20) 8、码转换模块C (22) 9、码转换模块D (24) 10、LCD1602驱动模块 (25) 四、硬件验证结果说明 (29) 1、引脚锁定 (29) 2、基本功能的验证 (30) 3、紧急情况处理部分 (33) 4、手动更改时间部分 (34) 五、Signal Tap仿真结果 (37) 六、心得体会 (38) 七、参考文献 (39) 八、附录(产品使用说明书) (39)
摘要 1、EDA技术的概念 EDA技术就是以计算机为工具,设计者在EDA软件平台上,用硬件描述语言VHDL完成设计文件,然后由计算机自动地完成逻辑编译、化简、分割、综合、优化、布局、布线和仿真,直至对于特定目标芯片的适配编译、逻辑映射和编程下载等工作。EDA技术的出现,极大地提高了电路设计的效率和可操作性,减轻了设计者的劳动强度。 利用EDA工具,电子设计师可以从概念、算法、协议等开始设计电子系统,大量工作可以通过计算机完成,并可以将电子产品从电路设计、性能分析到设计出IC版图或PCB版图的整个过程的计算机上自动处理完成。 现在对EDA的概念或范畴用得很宽。包括在机械、电子、通信、航空航天、化工、矿产、生物、医学、军事等各个领域,都有EDA的应用。目前EDA技术已在各大公司、企事业单位和科研教学部门广泛使用。例如在飞机制造过程中,从设计、性能测试及特性分析直到飞行模拟,都可能涉及到EDA技术。 2、VHDL语言概念 VHDL语言:超高速集成电路硬件描述语言(VHSIC Hardware Deseription Languagt,简称VHDL),是IEEE的一项标准设计语言。它源于美国国防部提出的超高速集成电路(Very High Speed Integrated Circuit,简称VHSIC)计划,是ASIC设计和PLD设计的一种主要输入工具。
城市道路平面交叉口优化设计 摘要:城市道路交叉路口各种车辆汇集、行人密度大、路况复杂,是交通事故多发点,改善道路平面交叉。是降低道路交通事故率的有效途径之一。本文对平面交叉口存在的主要问题进行了分析,提出了优化设计的基本内容,解决了交通组织的安全问题,并以身边宝石花路的平面交叉口进行实例安全分析和就改建、交通组织等方面提出了改善方案及建议。 关键词:平面交叉口;交通安全;优化设计;交通组织;渠化;视距三角形 1引言 随着城市化进程的加快,城市的规模也不断扩大,城市道路网也在不断增加。平面交叉口作为城市道路网中最为重要的一个部分,它的功能是连接相交道路,使其构成道路网,使路网中的人和车实现自由转向。在平面交叉口处由于多个方向的交通流进人,交通量大、冲突点多,所发生的交通事故也特别多。由此可见,合理进行交叉口安全设施设计,具有重要的作用和意义。 本文着重从道路本身来深人分析事故原因。 2我国道路交叉口常见问题 2.1道路交叉口本身的几何构造 由于我国城市道路网规划上的历史原因,在很多城市道路网中,特别是在一些城市的老城区中,交叉口存在诸多弊端,如多岔交叉口、不规则交叉口、锐角交叉口、错位交叉口及T形交叉口大量存在。同时,一些新建的道路在建设时期对建成后交通量预测不充分,设计时对交叉口的几何设计考虑不甚合理,如进出口车道设置不合理、交叉口面积过大、视距不足、线形不合理以及没有预留建设用地等,使交叉口通行能力不足,造成交叉口交通拥挤和车辆运行混乱,加大了交通事故的危险性。 2.1.1交叉口角度过小或畸形交叉口 两条道路相交时,其交角应该大于45°,过小的交角不仅在行车时容易造成对象冲突,而且司机也不容易判断被交道路的距离和交通情况。畸形多路交叉,如X型Y型往往会给交通组织带来麻烦,一般情况下采用环形交叉口来解决。但是当相交道路角度、间距、等级组合不当时也会带来很大问题,一般通过交通组织和渠化来进行改善。 2.1.2视距不良 非信号控制交叉口视距三角形内如果存在广告牌、灌木丛,或者很多中小城市一贯采用的交叉口四角黄金地段大型建筑物等障碍物,造成一定的盲区,使前进在盲区的司机没有安全感,驾驶速度过快而交叉口较小时,很容易于被交道路的车辆发生冲突。如果驾驶员遇紧急状况时来不及反应,采取应急措施不当而造成交通事故。速度过慢又会使得通行能力过低。 视距不良的改善:在不能拆迁房屋的情况下,应该在支路上设置停车让行标志,并且对交叉口附近机非分隔带的灌木进行消减。 2.1.3交叉口面积过大又缺少必要的渠化
浅析我国城市道路平面交叉口的优化设计 摘要:在我国,平面交叉口是交通事故的集中发生地。城市的交通事故抽样统计表明,发生在交叉口的交通事故数约为全部道路交通事故数的30%。城市道路平面交叉口交通安全是一个非常复杂的问题,本文为此提出城市道路平面交叉口设计的关键问题,以供同行参考。 关键词: 城市道路;平面交叉口;设计;渠化; 视距;导流岛 Abstract :In China, the intersection is the concentration of traffic accidents occu rred . The sample statistics of the city’s traffic accident shows that the number of traffic accidents occurred in the intersection is about 30% of all road traffic accidents. Urban road intersection traffic safety is a very complex issue , this paper proposed key issue of intersection design for peer reference.Keywords : urban roads; intersection ; design; canalization ; horizon ; diversion Island 一、主要原则 平面交叉口设计应遵循如下原则。 (1)保证视距 保证视距是减少交通事故发生十分有效的方法。与城市交叉口不同, 城市道路交叉口往往没有显著的特征,交叉口速度过高的部分原因是驾驶员并没有看到前方交叉口的存在。如果保证了视距,能清楚地了解相交道路车辆行驶状况,很多交通事故可以避免。 (2)降低车速 交叉口处超速是十分危险的。超速可能是驾驶员未意识到交叉口的存在,也可能是驾驶员意识到交叉口的存在也不减速,因此有必要采取速度控制技术。 (3)提前警告 在视距难以保证时,必须加以警示,提示驾驶员采取提前必要的措施,保障安全通过交叉口。如交叉路口警告标志用以警告车辆驾驶人谨慎慢行,注意横向来车,设在平面交叉路口驶入路段的适当位置。 (4)明确路权 只有明确路权才能保证交通安全有序。明确路权主要包括两个方面:一是从空间上明确车流冲突点的位置和减少冲突点的数量;二是从时间上明确车流行驶的路权和减少冲突点的个数。在没有信号控制的情况下,必须给予主要道路交通优先权,对次要道路采取停车让行、减速让行等控制措施。
1极化干涉SAR研究现状 1998年S.R.Cloude和K.P.Papathanassiou两位学者首先提出了将全极化信息用于干涉SAR的成像处理中,并利用四个极化通道的真实数据通过极化综合方式获得清晰的植被区域三维成像结果。该技术除了用于提高地 表成像高度精度外,还可提取表面的物理参数,如粗造度、湿度等信息,开创了极化干涉SAR理论和应用的先河。随后,Papathanassiou和Cloude 对极化干涉SAR进行一系列的研究,并提出了地面随机体散射散射(RVoG)模型,利用线型相干系数的复平面表示法来研究地表参数的反演,通过最 小二乘法等优化算法反演植被六维参数。 近年来,国外极化干涉SAR技术的理论研究有了突飞猛进的发展,其技术应用也已经扩展到很多领域。在森林资源监测与制图方面,2003年美国J.S.Lee等人利用E-SAR数据对森林植被区域分类,采用极化干涉SAR 技术极大地提高了地面分类正确率;同年日本Muhtar等人利用SIR-C/X-SAR系统得到的俄罗斯贝加湖东南森林地区数据进行极化干涉成像,获得了较清晰的植被高度成像结果。在冰川研究方面,2003年,J.Dall 首次把极化干涉SAR应用于地面冰雪研究;2005年Kazuki Nakamura等人利用机载的Pi-SAR全极化数据,对冰层分类,采用一种三分量散射模型的极化分解技巧,获得了同航空照片和录像图片几乎相同的分类结果。在土地利用和分类方面,2004年日本Toshifumi等人对Pi-SAR/X-SAR实测数据,利用极化相干系数差异成功对植被、城市地区进行分类;2005年J.David等人提出了农作物反演模型用于生物量的估计;2005年Yamada 等人基于ESPRIT超分辨方法利用极化干涉SAR检测森林地区的植被顶部和地表的局部散射中心,提高了森林测高反演的精度;2007年J.M.Lopez-Sanchez提出一种农作物参数模型进行极化干涉SAR反演,同年M.Jager等人提出结合干涉相位差可以提高极化干涉SAR地物分类的准确度。在城市建筑物分类和三维重建方面,2005年德国Stéphane等人利用E-SAR系统L波段重复飞行模式全极化数据,对城市地区建筑物进行分类识别,用ESPRIT算法对获得的优化干涉相位进行分析,发现建筑物的检测精度明显提高,超过80%的建筑物获得了较好高度估计精度,S.Guillaso等利用L波段极化干涉SAR数据提取城市建筑特征;2005
目录 1.前言 (3) 2总体方案设计 (4) 2.1方案论证与比较 (4) 2.2 方案的选择 (6) 3单元模块设计 (7) 3.1各单元模块功能介绍及电路设计 (7) 3.1.1 秒脉冲发生器 (7) 3.1.2 定时器 (7) 3.1.3 控制器 (9) 3.1.4 译码电路 (11) 3.1.5显示电路 (11) 3.1.6 总原理图 (12) 3.2 特殊器件的介绍 (13) 3.2.1 74LS160 (13) 3.2.2 74LS153 (14) 3.2.3 74LS74 (15) 3.2.4 CD4511 (16) 3.2.5 NE555 (17) 4系统调试 (19) 5系统功能、原件 (20) 5.1系统能实现的功能 (20) 5.2主要元件 (20) 6结论 (21) 7总结与体会 (22) 8致 (23) 9参考文献 (24) 附录: (25)
1.前言 在城镇街道的十字交叉路口,为保证交通秩序和行人安全,一般在每条道路上各有一组红、黄、绿交通信号灯,其中红灯亮,表示该条道路禁止通行;黄灯亮表示该条道路上未过停车线的车辆停止通行,已过停车线的车辆继续通行;绿灯亮表示该条道路允许通行。交通信号灯控制器自动控制十字路口两组红、黄、绿交通信号灯的状态转换,指挥主、从干道上各种车辆和行人的安全通行,实现十字路口交通管理的自动化。自从交通信号灯产生后其部控制电路几经完善使其更加合理与人性化,科技含量不断提高,各种新型算法的诞生使得控制理论向着智能化方向迈进,前人的基础上给信号控制器的进一步发展提供了宽阔的平台与一定的技术基础。 该设计是利用数字电路实现对交通灯的控制,可以提高其时间上的准确度及抗干扰能力,提出使交通灯控制电路用数字信号自动控制十字路口两组红、黄、绿交通灯的状态转换的方法,指挥各种车辆和行人安全通行,实现十字路口交通管理的自动化。因此,在本次课程设计里,将以传统的设计方法为基础来实现设计交通控制信号灯。本实验设计目的是培养数字电路的能力,掌握交通信号灯控制电路的设计方法。设计要求:1.两干道路灯亮的时间同为25秒;2.每次由绿灯变为红灯时,应有5秒黄灯亮作为过渡; 3.分别用红、黄、绿发光二极管表示信号灯; 4.设计计时显示电路。实验设计由秒脉冲发生器、定时器、控制器、译码显示电路组成。其中秒脉冲发生器由NE555产生脉冲,定时器由74LS160实现,控制器由74LS153和74LS74组成,译码电路采用CD4511和七段数码管来显示。控制器通过ST信号对定时器进行控制,从而显示红黄绿灯的转换。 设计过程中参考了一些相关文献,包括电子技术基础,电子技术课程设计实用教程,及西华大学图书馆相关藏书。本实验用portues7.8软件仿真实现。 由于所学知识有限,设计中难免出现错误,请老师批评指正。
信号交叉口时空资源综合优化 聂建强 信号交叉口时空资源综合优化就是对信号交叉口的时空资源进行整合得到最优的设计方案。 信号交叉口时空资源综合优化的互动关系: 1)提出城市单点信号交叉口时空资源互动优化理念,构建信号交叉口时空资源综合优化设计的新框架和系统流程; 信号控制交叉口系统: 交叉口空间界定和进口 信号交叉口系统:信号交叉口空间系统和信号控制系统; 交叉口空间:交通运行状态发生变化的断面所围成的区域,即交叉口进口道展宽起始位置以内的整个区域。 交叉口通行区域:交叉口外围通行区域、交叉口内部通行区域。 交叉口的矩阵表示 交叉口信号控制系统
按控制方式分:定周期信号控制、感应式信号控制(半感应式信号控制、感应式信号控制); 按控制范围分类:单个交叉口的交通信号控制(点控)、干道交通信号联动控制(线控)、区域交通信号控制(面控)。 交叉口信号控制的特点 通行能力、安全性、效率和舒适性 信号交叉口交通设计: 信号交叉口时空资源优化设计方法:
2)交叉口信号控制的设置依据: 交通量和延误是考查交叉口该用什么控制方式的主要可定量分析的工具。 设置交通控制信号虽有理论分析的依据,但尚未成为公认的有效的方法,加上世界各国的交通条件各有差异,所以各国制定的依据的具体数字不尽相同,但原则上根据上述理论分析的思路,考虑各自的交通实际情况制定出各自的依据。 《美国统一交通控制设施手册》制定的依据较为详细,下面主要介绍这个手册定的依据; 设置交通信号灯必须做得调查工作? (1)车辆与行人的交通流量 (2)进口道上的行驶速度 (3)交叉口的平面布置图 (4)交通事故及冲突记录图 (5)可穿越临界空档 (6)延误 为什么要设置信号灯? 什么时候设置? 信号交叉口空间优化设计: 空间设计阶段:初步方案产生阶段和时空综合优化调整阶段。 设计交通量 城市道路交叉口进行交通设计时,应采用日高峰小时流率作为设计交通量。 城市交叉口设计交通量的确定方法:
《交通设计》课程设计 -------焦作市民主路与解放路交叉口优化 -------焦作市民主路与解放路交叉口优化 (1) 一、基础资料收集与整理 (2) 1、交叉口概况 (2) 2、道路几何条件调查 (3) 三、交通条件调查 (6) 1、平峰机动车交通量调查 (6) 2、高峰机动车交通量调查 (10) 二、问题分析与对策 (15) 1、现状评价 (15) 2. 交通问题与对策 (22) 三.交叉口概略设计 (27) 1. 东、西、北进口道的拓宽 (27) 2东进口出口道的拓宽 (28) 4. 路段上的展宽和渐变段长度优化设计 (28) 5. 完善交叉口处标线 (29) 四.交叉口详细设计 (29) 1. 东、西、北进口拓宽及渐变宽段的详细设计 (29)
2. 东进口进口道拓宽的问题 (31) 3. 公交线路及公交停靠站的优化 (31) 4.交叉口标线的完善 (32) 五,优化方案评价 (33) 1. 现状和改善方案的效果 (33) 2成本和效益的分析 (33) 六. 总结 (33) 一、基础资料收集与整理 1、交叉口概况 民主路与解放路交叉口为十字形交叉路口,这两条道路都是焦作市的市主干道。民主路为南北走向,解放路为东西走向。由于道路建设年代较早,道路线宽度较窄,已经较难以适应交通量的增长要求,虽然经过多次设计规划,但交通拥堵问题依然存在。民主路为一块板形式,入口道两车道、出口道一条车道;解放路为三块板结构的东西走向线,入口道拓宽为三车道、出口道为双车道。由于道路资源有限,为适应交通量发展要求,道路无绿化隔离带,只是设置隔离栅栏以分隔对向车辆和划分机非车道。周边分布着百货大楼、三维广场、肯德基和麦当劳等等大的客流吸引地,河南理工大学北校区以及大量的小型商铺等的生活区,此外还有邮政、工商银行等服务机构,交通环境较为复杂。由于处于商业活
机器人干涉区及互锁集团标准化小组:[VVOPPT-JOPP28-JPPTL98-LOPPNN]
机器人干涉区及机器人互锁信号 干涉区描述: 同一工位的机器人,在工作过程中,需要进入到同一个区域,但在进入的先后次序无严格的限定,即:任意一台机器人先进入,在工艺上都允许(除了影响运行时间外),允许使用干涉区信号对控制机器人运行,防止机器人之间碰撞。对于有严格的工艺时序的干涉,采用互锁信号来控制。 1、机器人干涉区采用绝对优先方式,说明如下: R4机器人优先,使用干涉信号“17”,R2机器人输出OT#(17),为R4机器人输入IN#(17);R4机器人输出OT#(17),为R2机器人输入IN#(17)。
说明: 1)、关于程序结束时,干涉区信号的状态ON : 程序结束后状态:R2机器人的OT#(17)ON ;R4机器人的OT#(17)ON 。干涉区允许信号保持ON 状态;因为 如果R4的干涉信号OFF ,则必须知道R2机器人已经离开干涉区,这样机器人之间还需要更多的交互信号;如果在R2\R4都循环完成后OFF ,则可能影响机器人利用效率。 2)、2次干涉信号允许确认: 防止2台机器人同时进入干涉区,既:机器人禁止另一台进入信号已经发出,但对方尚未接收到信号时刻,2台机器人存在同时进入了干涉区的可能性。 3)、在PLC 编程中,信号关系: 2、 如果两台机器人之间存在多个干涉区,则要求使用不同的干涉区信号。 3、 干涉信号地址分配:
从IN/OT--9开始,机器人之间干涉区数量按照4个进行预留,即:只要使用数量不超过4个,则存在干涉区机器人,在生产线交互信号中PLC 程序中,按照4个干涉区信号进行预留编程。 4工位之间的机器人、同一工位的机器人之间干涉现象,但不属于干涉区描述属性时,采用互锁信号来处理。 R22台机