变量名称变量模糊
论域覆盖的模糊
子集名称
模糊子集
类型
模糊子集拐
点的参数
液位
level[-1 1]negative(偏
高)
[0.3 -1]
《模糊控制》大作业
王光辉自123 121001
水箱液位模糊控制系统的设计
一、目的:
1、掌握利用matlab进行模糊控制系统设计与仿真的方法
2、深入理解模糊控制器的设计过程和设计方法
3、深入理解模糊控制系统的设计过程
二、设计内容
已知一水箱中液体的流出是随机变化的。通过人工控制进液阀门开度大小,能够调节水箱内液位的高低,使液位保持恒定。根据人工操作经验,总结出如下的操作规则:
如果液位偏低,则快开阀门
如果液位正好,则阀门开度不变
如果液位偏高,则快关阀门
如果液位正好而液位变化慢,则慢开阀门
如果液位正好而液位变化快,则慢关阀门
设计一个模糊控制系统,使水箱液位保持恒定。
三、设计过程(alt+印屏幕键,可以复制当前窗口)
1、模糊控制器的设计
利用FIS编辑器设计mamdani型模糊控制器
(1)模糊控制器的结构
输入变量:液位level 进液流速rate
输出变量:阀门开度valve
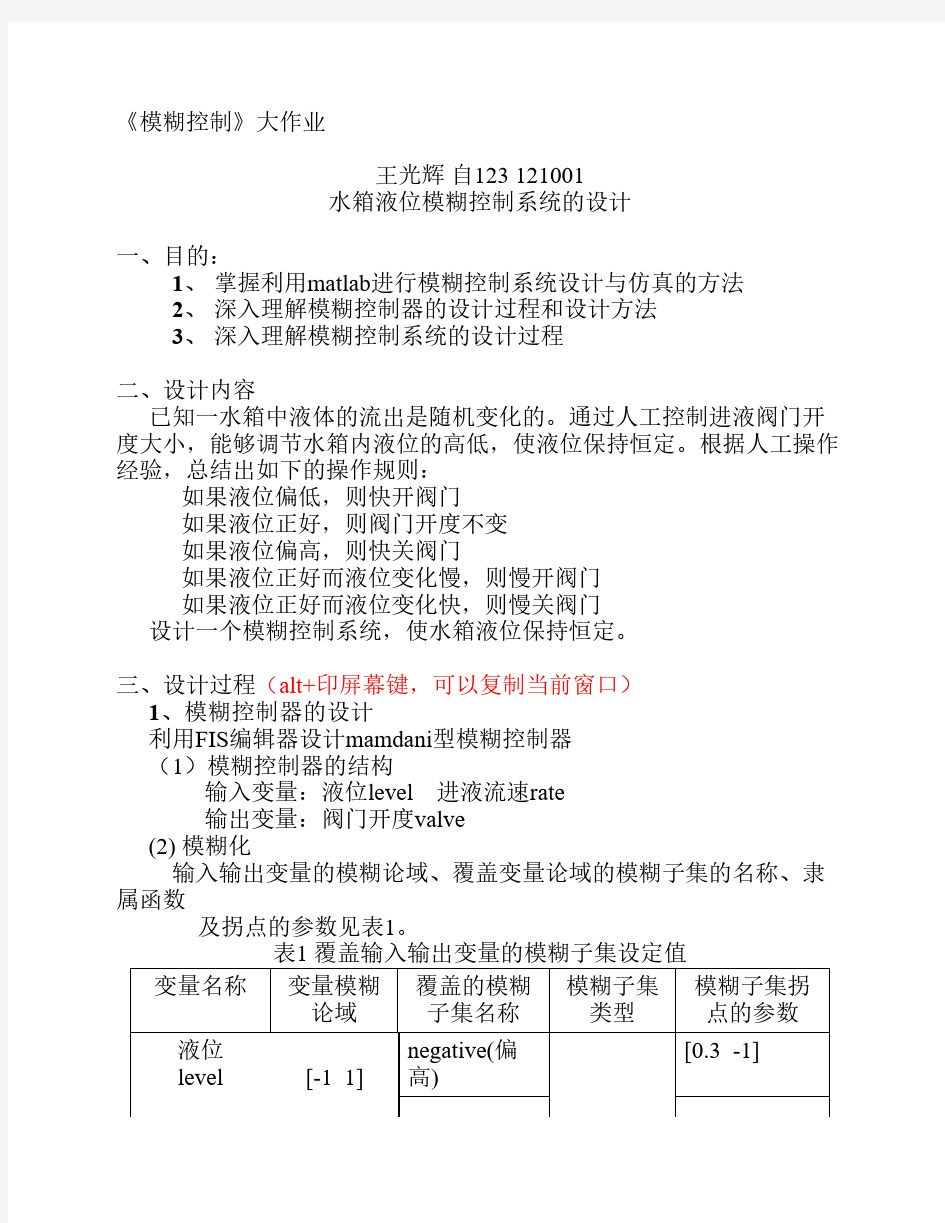
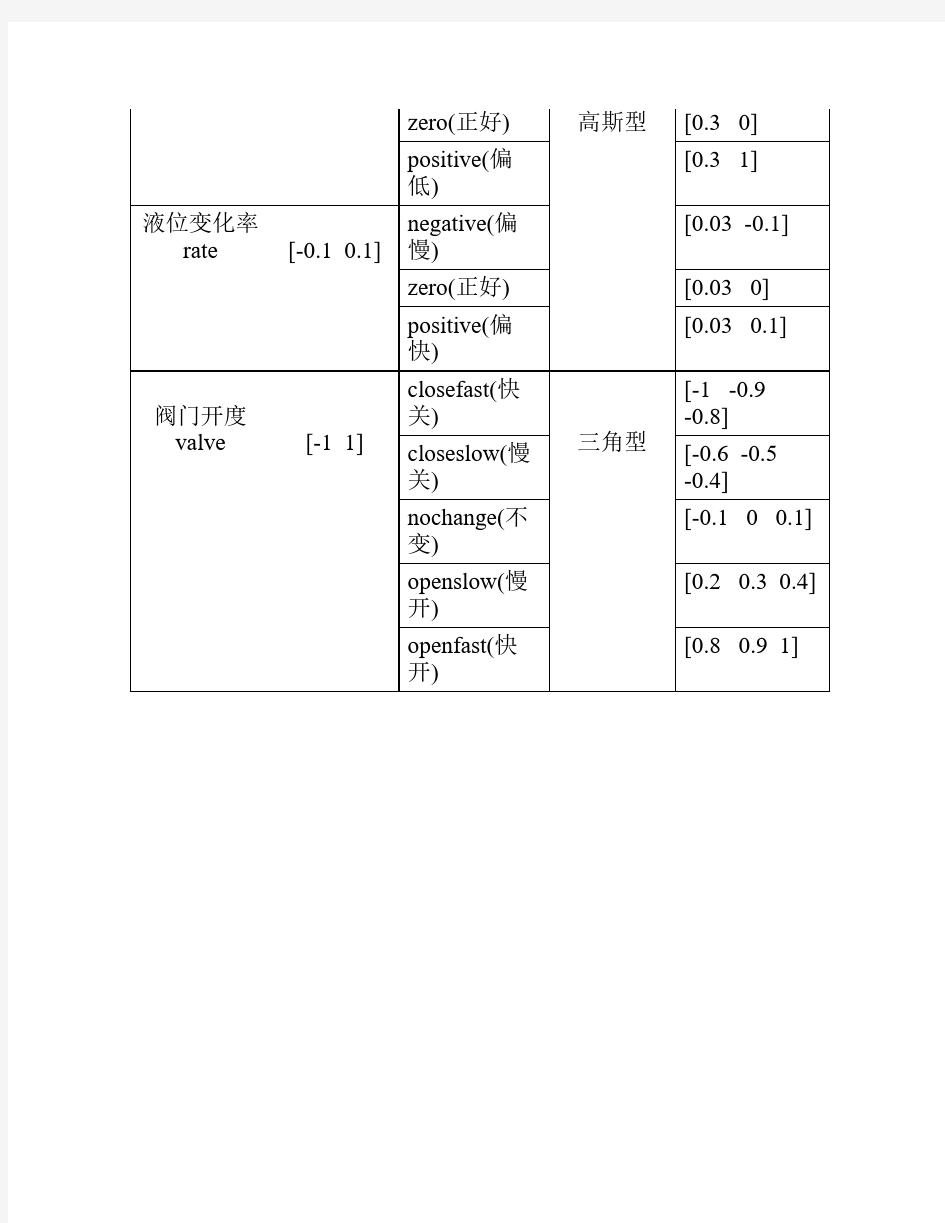
(2) 模糊化
输入输出变量的模糊论域、覆盖变量论域的模糊子集的名称、隶属函数
及拐点的参数见表1。
表1 覆盖输入输出变量的模糊子集设定值
zero(正好)高斯型[0.3 0] positive(偏
低)
[0.3 1]
液位变化率
rate[-0.1 0.1]negative(偏
慢)
[0.03 -0.1] zero(正好)[0.03 0] positive(偏
快)
[0.03 0.1]
阀门开度
valve[-1 1]closefast(快
关)
三角型
[-1 -0.9
-0.8] closeslow(慢
关)
[-0.6 -0.5
-0.4] nochange(不
变)
[-0.1 0 0.1]
openslow(慢
开)
[0.2 0.3 0.4]
openfast(快
开)
[0.8 0.9 1]
(3)编辑模糊规则
模糊控制规则如表2所示,利用规则编辑器编辑语言型模糊规则。
表2 液位模糊控制规则
Level rate none(无)negative(偏
慢)
zero(正好)positive(偏
快)
none(无)
negative(偏
高)closefast(快
关)
zero(正好)nochange(不
变)openslow(慢
开)
closeslow(慢
关)
positive(偏
低)openfast(快
开)
(4)模糊逻辑推理
按表3选择模糊逻辑推理算法,并利用5种清晰化算法,分别求出模糊控制器在level=0.3和 rate=0.08时的输出。
表3模糊逻辑推理算法
模糊逻辑选项
And
method
Or
method
Implication Aggregation defuzzification
选定
算法
min max min max
(5)保存
注意:在设计过程中随时保存。
2、模糊控制系统的仿真
利用simulink建立水箱液位模糊控制系统的模型并仿真。
系统模型见tank_fc.mdl文件,理解系统模型(双击模块可查看模块属性),
嵌入上面设计好的模糊控制器,仿真运行,分析结果。
图1 水箱模糊控制系统模型
面积中心法
面积平分法
最大隶属度法(平均值法)
最大隶属度法(最大值法)
最大隶属度法(最小值法)
总结:运用不同的模糊算法得到的输出结果不同,就本系统来说,面积中心法比面积平分法来说,输出波形更稳定一些,波动要小一些。当液位及液位变化率选择不同的模糊集合隶属函数,会使输出产生极大的变化,甚至使系统不稳定。
3、选做:
改变模糊集合的隶属函数类型、模糊规则数目、清晰化算法等,分析对控制效果的影响。参见P211~ P217
模糊控制的优缺点
————————————————————————————————作者:————————————————————————————————日期:
1.模糊控制中模糊的含义 模糊控制中的模糊其实就是不确定性。从属于该概念和不属于该概念之间没有明显的分界线。模糊的概念导致了模糊现象。 2.模糊控制的定义 模糊控制就是利用模糊数学知识模仿人脑的思维对模糊的现象进行识别和判断,给出精确的控制量,利用计算机予以实现的自动控制。 3.模糊控制的基本思想 模糊控制的基本思想:根据操作人员的操作经验,总结出一套完整的控制规则,根据系统当前的运行状态,经过模糊推理,模糊判断等运算求出控制量,实现对被控制对象的控制。 4.模糊的控制的特点 不完全依赖于纯粹的数学模型,依赖的是模糊规则。模糊规则是操作者经过大量的操作实践总结出来的一套完整的控制规则。 模糊控制的对象称为黑匣(由于不知道被控对象的内部结构、机理,无法用语言去描述其运动规律,无法去建立精确的数学模型)。但是模糊规则又是模糊数学模型。 5 模糊控制的优缺点及需要解决的问题分析 5.1模糊控制的优点 (1)使用语言方便,可不需要过程的精确数学模型;(不需要精确的数学模型) (2)鲁棒性强,适于解决过程控制中的非线性、强耦合时变、
滞后等问题;鲁棒性即系统的健壮性。 (3)有较强的容错能力。具有适应受控对象动力学特征变化、环境特征变化和动行条件变化的能力; (4)操作人员易于通过人的自然语言进行人机界面联系,这些模糊条件语句容易加到过程的控制环节上。 5.2模糊控制的缺点 (1)信息简单的模糊处理将导致系统的控制精度降低和动态品质变差; (2)模糊控制的设计尚缺乏系统性,无法定义控制目标。 6.模糊数学 模糊数学就是利用数学知识研究和解决模糊现象。在数学和模糊现象之间架起了一座桥梁。 6.1模糊集合的概念 每一个概念都有内涵和外延。 内涵就是指概念的本质属性的集合。外延就是符合某种本质属性的全体对象的集合。 模糊数学的基础就是模糊理论集。 在模糊集合设计到的论域U 上,给定了一个映射A,A :U →[0,1] ,)(x x A μ ,则称A 为论域U 上的模糊集合或者模糊子集; )(x A μ表示U 中各个元素x 属于集合A 的程度,称为元素x 属于模糊集合A 的隶属函数。当x 是一个确定的0x 时,称)(0x A μ为元素0x 对于模糊集合A 的隶属 度。 F 集合引出的几个概念
微型计算机控制技术学习心得 转眼间,一个学期又过去了。微机原理与控制技术课程已经结束了。通过从大三下学期的微机原理与接口技术到这学期的微机原理与控制技术的学习,回想起来受益匪浅,主要是加深了对计算机的一些硬件情况和运行原理的理解和汇编语言的编写,期间也听老师讲过,微机原理这门课程是比较偏硬件一点的。正是因为这一点我还是对它比较喜欢的,因为它和我的专业方向“机电工程”有很大的联系,在机电工程领域很多场合要应用到微机,而且是微机原理是考研复试面试时必考问的专业课,因为我要考研,本着一定要考上的心态,因此对该课程的学习还是有浓厚的兴趣和动力的。下面谈谈这期学习该课程的心得与体会:总体介绍下这门课程的轮廓吧(也就是教学大纲): 一、课程性质与设置目的 (一)课程性质 微型计算机控制技术是高等院校计算机应用专业本科教学中的一门选修专业课,是从微型计算机原理到微型计算机控制,从理论到实际的必经桥梁,是着重解决和处理工程实际问题的一门课程。在该课程的教学过程中,将课堂教学与实验教学有机结合,注意培养同学分析问题、解决问题的方法和能力。 该课程主要介绍微型计算机应用在工业控制中的各种技术,重点讲述微型机用于实时控制中的软件、硬件设计方法,以及它们之间的结合问题。课程注重理论联系实际,从工程实际出发,在设计方法,即实验技术、操作运行、系统调试等方面对学生进行训练,为学生的毕业设计及将来的实际工作奠定基础。(二)教学目的 通过本课程的学习,可使我们对微型机在工业过程控制和智能化仪器方面的应用有个比较全面的了解,为以后的工作和毕业设计打下基础。 二、下面我对该门课程的教学内容做了一个详细的总结 1.第1章微型计算机控制系统概述 2.教学要点 1.微型计算机控制系统的组成 2.微型计算机控制系统的分类 3.微型计算机控制系统的发展 3.教学内容 通过对本章的学习,应当对微型计算机控制系统有一个完整的概念,具体掌握以下几方面的内容。 4. 1.了解微型计算机控制系统的组成。 2.学习并掌握微型计算机控制系统的分类 及各系统之间的区别。
模糊控制查询表的MATLAB 实现 叶高文(厦门海洋职业技术学院,福建厦门361012) MATLAB realization of Fuzzy Control Query Table 在运用模糊控制技术进行工业控制时,为了减少在线计算量,节省内存,提高PLC 等控制器的运行效率,通常根据隶属度函数和模糊控制规则表离线计算对应的模糊控制表,并将该表置于PLC 等控制器中,供实时控制时使用。在实时控制过程中,根据模糊量化后的偏差值e 和偏差变化率ec 直接查询控制表以获得模糊控制输出量,再转换为精确输出控制量。在实际的控制过程中由于微分作用的效果不是很明显,故很多实际情况中只采用PI 控制。本文论述的对象是常用PLC 的模糊PI 控制。不是PLC 的系统,可将积分时间转换为积分系数。 1模糊PI 控制模型说明 本文提供一个实际工业控制的模糊查询表的MATLAB 实 现过程,模糊PI 模型如图1。 图1模糊PI 控制器模型 如图1,模糊控制器的输入量采用实际被控制量与给定量的偏差e 和偏差变化率ec ,参数整定机构采用增量型调整原理,输出为比例系数增量ΔK P 和积分时间增量ΔTi ,再经式K P = K P0+ΔK P 和式T I =T I0+ΔTi 计算得到PI 控制器的比例系数KP 和积分时间值TI 。 2模型输入输出模糊控制规则表 2.1定义输入输出变量的隶属度矢量表 一般情况下,输入量偏差e 和偏差变化率△e 以及输出变量ΔKP 和ΔTi 的离散论域都设定为13个量化等级邀-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6妖。为方便MATLAB 编程,对相关的变量选择进行一些改变。原先的输入变量偏差e 和偏差变化率ec 的量化等级邀-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6妖改写为邀1,2,3,4,5,6,7,8,9,10,11,12,13妖。而输出变量ΔKP 和ΔTi 得量化等 级保持为邀-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6妖。 输入变量偏差e 和偏差变化率ec 和输出变量ΔKP 、ΔTi 的模糊语言值均为邀NB ,NM ,NS ,ZO ,PS ,PM ,PB妖。为了编程方便,将语言值用数字表示为邀1,2,3,4,5,6,7妖,与模糊语言值相对应,比如:模糊语言值NB 的模糊数字值为1,其他类似。根据以上的规定,产生用数字语言值表示输入变量x1及x2的隶属度矢量表,见表1所示。其中,变量x1表示模糊控制器的偏差输入e ,变量x2表示模糊控制器的偏差输入ec ;f1(i )、f2(j )表示第一输入x1和第二输入x2的隶属度,而i 、j 表示语言变量数字值,即为1,2,3,4…7。 表1用数字语言值表示输入变量x1及x2的隶属度矢量表 2.2模糊控制规则表 该控制系统为一实际工业控制模型,其用数字语言值表示的比例系数增量ΔKP 和积分时间ΔTI 模糊控制规则表如表2和表3所示。 表2 用数字语言值表示的ΔKP 模糊控制规则 摘 要 通过建立一个工业自动化控制中经常使用的模糊PI 控制器模型,详细论述了运用MATLAB 语言编写模糊控制查询表的方法,该控制表可以表格形式存放于计算机,从而大大提高了如PLC 等内存小的工业控制器的运行效率,也可实现在线推理控制。 关键词:模糊控制查询表,MATLAB ,PI 控制,在线推理 Abstract Through the establishmengt of Fuzzy-PI controller model which is applied in the industrial automation control,This pa-per describes in detail the way how to get a fuzzy -control-query table by the MATLAB programming.This cotrol-table may be stored in the compute with the form of a table,Which can improe greatly the operational efficiency,Such as PLC controller,etc.whose memory is very little,and on-line reasoning can also be realized. Keywords :fuzzy control query table,MATLAB,PI control,on-line reasoning 模糊控制查询表的MATLAB 实现 64
一、速度控制算法: 首先定义速度偏差-50 km/h ≤e (k )≤50km/h ,-20≤ec (i )= e (k )- e (k-1)≤20,阀值e swith =10km/h 设计思想:油门控制采用增量式PID 控制算法,刹车控制采用模糊控制算法,最后通过选择规则进行选择控制量输入。 选择规则: e (k )<0 ① e (k )>- e swith and throttlr_1≠0 选择油门控制 ② 否则:先将油门控制量置0,再选择刹车控制 0 模糊控制理论 概述 模糊逻辑广泛适用于机械控制。这个词本身激发一个一定的怀疑,试探相当于“仓促的逻辑”或“虚假的逻辑”,但“模糊”不是指一个部分缺乏严格性的方法,而这样的事实,即逻辑涉及能处理的概念,不能被表达为“对”或“否”,而是因为“部分真实”。虽然遗传算法和神经网络可以执行一样模糊逻辑在很多情况下,模糊逻辑的优点是解决这个问题的方法,能够被铸造方面接线员能了解,以便他们的经验,可用于设计的控制器。这让它更容易完成机械化已成功由人执行。 历史以及应用 模糊逻辑首先被提出是有Lotfi在加州大学伯克利分校在1965年的一篇论文。他阐述了他的观点在1973年的一篇论文的概念,介绍了语言变量”,在这篇文章中相当于一个变量定义为一个模糊集合。其他研究打乱了,第二次工业应用中,水泥窑建在丹麦,即将到来的在线1975。 模糊系统在很大程度上在美国被忽略了,因为他们更多关注的是人工智能,一个被过分吹嘘的领域,尤其是在1980年中期年代,导致在诚信缺失的商业领域。 然而日本人对这个却没有偏见和忽略,模糊系统引发日立的Seiji Yasunobu和Soji Yasunobu Miyamoto的兴趣。,他于1985年的模拟,证明了模糊控制系统对仙台铁路的控制的优越性。他们的想法是被接受了,并将模糊系统用来控制加速、制动、和停车,当线于1987年开业。 1987年另一项促进模糊系统的兴趣。在一个国际会议在东京的模糊研究那一年,Yamakawa论证<使用模糊控制,通过一系列简单的专用模糊逻辑芯片,在一个“倒立摆“实验。这是一个经典的控制问题,在这一过程中,车辆努力保持杆安装在顶部用铰链正直来回移动。 这次展示给观察者家们留下了深刻的印象,以及后来的实验,他登上一Yamakawa酒杯包含水或甚至一只活老鼠的顶部的钟摆。该系统在两种情况下,保持稳定。Yamakawa最终继续组织自己的fuzzy-systems研究实验室帮助利用自己的专利在田地里的时候。 模糊控制表推导过程 一、模糊划分及模糊化 对于偏差e的模糊划分取NB、NS、ZE、PS、 PB五个模糊量,并且在相邻的模糊量中,存 在如下关系: 1)、本模糊量的隶属度最大的元素,是相邻模 糊量的隶属度为0的元素。 2)、模糊量的形状是等腰三角形。 3)、论域为[-X,X]. 下图是隶属函数图象 NB NS 1 ZE PS PB -X -2X/3 -X/3 0 X/3 2X/3 X 图1 隶属函数图象 二、论域变换 1、偏差e的论域变换 偏差e的论域是[-X,X],欲把它变换成离散论域[-3,-2,-1,0,1,2,3],则有量化因子qe: qe=6/2X=3/X 显然,对于元素-X、-2X/3、-X/3、0、X/3、2X/3、X,则有相应的离散论域元素ei: e1=qe*(-X-0)=-3 e2=qe*(-2X/3-0)=-2 e3=qe*(-X/3-0)=-1 e4=qe*(0-0)=0 e5=qe*(X/3-0)=1 e6=qe*(2X/3-0)= 2 e7=qe*(X-0)=3 1、偏差变化率de的论域变换 偏差变化率de的论域是[-Y,Y],欲把它变换成离散论域[-3,-2,-1,0,1,2,3],则有量化因子qde: qde=6/2Y=3/Y 显然,对于元素-Y、-2Y/3、-Y/3、0、Y/3、2Y/3、Y,则有相应的离散论域元素dei: de1=qde*(-Y-0)=-3 de2=qde*(-2Y/3-0)=-2 de3=qde*(-Y/3-0)=-1 de4=qde*(0-0)=0 de5=qde*(Y/3-0)=1 de6=qde*(2Y/3-0)= 2 de7=qde*(Y-0)=3 2、控制量C的论域变换 偏差C的论域是[-W,W],欲把它变换成离散论域[-3,-2,-1,0,1,2,3],则有量化因子qC: qC=6/2W=3/W 显然,对于元素-W、-2W/3、-W/3、0、W/3、2W/3、W,则有相应的离散论域元素Ci: C1=qC*(-W-0)=-3 C2=qC*(-2W/3-0)=-2 C3=qC*(-W/3-0)=-1 C4=qC*(0-0)=0 C5=qC*(W/3-0)=1 C6=qC*(2W/3-0)= 2 基于模糊控制的速度控制 ——地面智能移动车辆速度控制系统问题描述 利用模糊控制的方法解决速度跟踪问题,即已知期望速度(desire speed),控制油门(throttle output)和刹车(brake output)来跟踪该速度。已知输入:车速和发动机转速(值可观测)。欲控制刹车和油门电压(同一时刻只有一个量起作用)。 算法思想 模糊控制器是一语言控制器,使得操作人员易于使用自然语言进行人机对话。模糊控制器是一种容易控制、掌握的较理想的非线性控制器,具有较佳的适应性及强健性(Robustness)、较佳的容错性(Fault Tolerance)。利用控制法则来描述系统变量间的关系。不用数值而用语言式的模糊变量来描述系统,模糊控制器不必对被控制对象建立完整的数学模式。 Figure 1模糊控制器的结构图 模糊控制的优点: (1)模糊控制是一种基于规则的控制,它直接采用语言型控制规则,出发点是现场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确的数学模型,因而使得控制机理和策略易于接受与理解,设计简单,便于应用。 (2)由工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊控制对那些数学模型难以获取,动态特性不易掌握或变化非常显著的对象非常适用。 (3)基于模型的控制算法及系统设计方法,由于出发点和性能指标的不同,容易导致较大差异;但一个系统语言控制规则却具有相对的独立性,利用这些控制规律间的模糊连接,容易找到折中的选择,使控制效果优于常规控制器。 (4)模糊控制是基于启发性的知识及语言决策规则设计的,这有利于模拟人工控制的过程和方法,增强控制系统的适应能力,使之具有一定的智能水平。 简化系统设计的复杂性,特别适用于非线性、时变、模型不完全的系统上。 模糊控制的缺点 简易模糊控制器的设计及仿真 摘要:模糊控制(Fuzzy Control )是以模糊集理论、模糊语言和模糊逻辑推理为基础的一种控制方法,它从行为上模仿人的模糊推理和决策过程。本文利用MATLAB/SIMULINK 与FUZZY TOOLBOX 对给定的二阶动态系统,确定模糊控制器的结构,输入和输出语言变量、语言值及隶属函数,模糊控制规则,比较其与常规控制器的控制效果,用MATLAB 实现模糊控制的仿真。 关键词:模糊控制 参数整定 MATLAB 仿真 二阶动态系统模型: ()()1140130120 ++s s 采用simulink 图库,实现常规PID 和模糊自整定PID 。 一.确定模糊控制器结构 模糊自整定PID 为2输入3输出的模糊控制器。在MATLAB 的命令窗口中键入fuzzy 即可打开FIS 编辑器,其界面如下图所示。此时编辑器里面还没有FIS 系统,其文件名为Untitled ,且被默认为Mandani 型系统。默认的有一个输入,一个输出,还有中间的规则处理器。在FIS 编辑器界面上需要做一下几步工作。 首先,模糊自整定PID 为2输入3输出的模糊控制器,因此需要增加一个输入两个输出,进行的操作为:选择Edit 菜单下的Add Variable/Input 菜单项。 如下图。 其次,给输入输出变量命名。单击各个输入和输出框,在Current Variable 选项区域的Name文本框中修改变量名。如下图 最后,保存系统。单击File菜单,选择Export下的To Disk项。这里将创建的系统命名为PID_auot.fi。 二.定义输入、输出模糊集及隶属函数 1.控制系统对检测变送的基本要求是准确、迅速和可靠 2.从理论上讲,干扰通道存在纯滞后不影响系统的控制质量。 3.离心泵的控制方案有直流节流法、改变泵的转速n 改变旁路回流量。效 率最差的是改变旁路回流量。 4.随着控制通道的增益K o的增加,控制作用___增强_______,克服干扰能力 增大,最大偏差减小系统的余差减小 5.控制器的选择包括结构材质的选择、口径的选择、流量特性的选择和 正反作用的选择。 6.防积分饱和的措施有对控制器的输出限幅、限制控制器积分部分的输出 和积分切除法。 7.如果对象扰动通道增益K f增加,扰动作用__增强__,系统的余差__增大__,最 大偏差_增大___。 8.简单控制系统的组成,各部位的作用是什么? 解答: 简单控制系统由检测变送装置、控制器、执行器及被控对象组成。 检测变送装置的作用是检测被控变量的数值并将其转换为一种特定输出信号。 控制器的作用是接受检测装置送来的信号,与给定值相比较得出偏差,并按某种运算规律算出结果送往执行器。 执行器能自动地根据控制器送来的控制信号来改变操纵变量的数值,以达到控制被控变量的目的。 被控对象是指需要控制其工艺参数的生产设备或装置 9.气动执行器由__调节__机构和执行机构两部分组成,常用的辅助装置有 __阀门__定位器和手轮机构。 10.调节系统中调节器正反作用的确定依据是保证控制系统成为负反馈。 11.被控变量是指工艺要求以一定的精度保持__恒定 _或随某一参数的变化而 变化的参数。 12.反应对象特性的参数有放大倍数、时间常数、和纯滞后时间。 13.自动调节系统常用参数整定方法有哪些?常用的参数整定方法有!经验法*衰 减曲线法*临界比例度法*反应曲线法) 动态特性参数法,稳定边界法,衰减曲线法,经验法。 14.检测变送环节对控制系统的影响主要集中在检测元件的滞后和信号传递 的滞后问题上。 15.什么是对象数学模型,获取模型的方法有哪些? 答:对对象特性的数学描述就叫数学模型。 机理建模和实验建模混合建模 16.简述被控量与操纵量的选择原则。. 答:一、(1) 被控量的选择原则: ①必须尽可能选择表征生产过程的质量指标作为被控变量; ②当没有合适的质量指标时,应选择与质量指标由单质对应关系的间接指标作为被控量; ③间接指标必须有足够的灵敏度; 已知系统的传递函数为:1/(10s+1)*e(-0.5s)。假设系统给定为阶跃值r=30,系统初始值r0=0.试分别设计 (1)常规的PID控制器; (2)常规的模糊控制器; (3)比较两种控制器的效果; (4)当通过改变模糊控制器的比例因子时,系统响应有什么变化? 一.基于simulink的PID控制器的仿真及其调试: 调节后的Kp,Ki,Kd分别为:10 ,1,0.05。 示波器观察到的波形为: 二.基于simulink的模糊控制器的仿真及其调试: (1)启动matlab后,在主窗口中键入fuzzy回车,屏幕上就会显现出如下图所示的“FIS Editor”界面,即模糊推理系统编辑器。 (2)双击输入量或输出量模框中的任何一个,都会弹出隶属函数编辑器,简称MF编辑器。 (3)在FIS Editor界面顺序单击菜单Editor—Rules出现模糊规则编辑器。 本次设计采用双输入(偏差E和偏差变化量EC)单输出(U)模糊控制器,E的论域是[-6,6],EC的论域是[-6,6],U的论域是[-6,6]。它们的状态分别是负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)。语言值的隶属函数选择三角形的隶属度函数。推理规则选用Mamdani 控制规则。 该控制器的控制规则表如图所示: Simulink仿真图如下: 在调试过程中发现加入积分调节器有助于消除静差,通过试凑法得出量化因子,比例因子以及积分常数。Ke,Kec,Ku,Ki分别是: 3 ,2.5 ,3.5 ,0.27 三.实验心得: 通过比较PID控制器和模糊控制器,我们可知两个系统观察到的波形并没有太大的区别。相对而言,对于给出精确数学模型的控制对象,PID控制器显得更具有优势,其一是操作简单,其二是调节三个参数可以达到满意的效果;对于给出给出精确数学模型的控制对象,模糊控制器并没有展现出太大的优势,其一是操作繁琐,其二是模糊控制器调节参数的难度并不亚于PID控制器。 在实验中增大模糊控制器的比例因子Ku会加快系统的响应速度,但Ku过大将会导致系统输出上升速率过快,从而使系统产生较大的超调量乃至发生振荡;Ku过小,系统输出上升速率变小,将导致系统稳态精度变差。 4模糊控制器的设计 4 Design of Fuzzy Controllor 4.1概述(Introduction) 随着PLC在自动控制领域内的广泛应用及被控对象的日趋复杂化,PLC控制软件的开发单纯依靠工程人员的经验显然是行不通的,而必须要有科学、有效的软件开发方法作为指导。因此,结合PLC可编程逻辑控制器的特点,应用最新控制理论、技术和方法,是进一步提高PLC软件开发效率及质量的重要途径。 系统设计的目标之一就是要提高装车的均匀性,车厢中煤位的高度变化直接影响装车的均匀性,装车不均匀对车轴有很大的隐患。要保持高度值不变就必须不断的调整溜槽的角度,但是,在装车过程中,煤位的高度和溜槽角度之间无法建立精确的数学模型。模糊控制它最大的特点是[43-45]:不需建立控制对象精确数学模型,只需要将操作人员的经验总结描述成计算机语言即可,因此采用模糊控制思想实现均匀装车是行之有效的方法。虽然很多PLC生产厂家推出FZ模糊推理模块,但这些专用模块价格昂贵,需使用专门的编程设备,成本高通用性差,所以自主开发基于模糊控制理论的PLC控制器有很大的工程价值。 本章首先介绍了模糊控制的基本原理、模糊控制系统及模糊控制器的设计步骤;然后在对煤位高度控制系统分析的基础上,设计基于模糊理论的PLC控制,分别从查询表计算生成和PLC程序查询两个部分进行设计。 4.2模糊控制原理(Fuzzy Control Principle) 4.2.1模糊控制理论(Fuzzy Control Theory) 模糊控制理论是由美国加利福尼亚大学的自动控制理论专家L.A.Zadch教授首次提出,由英国的Mamdani首次用于工业控制的一种智能控制技术[46]。模糊控制(FUZZY)技术是一种由数学模型、计算机、人工智能、知识工程等多门科学领域相互渗透、理论性很强的科学技术。 模糊控制是以人的控制经验作为控制的知识模型,以模糊集合、模糊语言变量以及模糊逻辑推理作为控制算法的数学工具,用计算机来实现的一中计算机智能控制[47-48]。它的基本思想是:把人类专家对待特定的被控对象或过程的控制策略总结成一系列以“IF…THEN…”形式表示的控制规则,通过模糊推理得到控制作用集,作用与被控对象或过程。与传统的控制方法相比,它具有以下优点[48]:无需知道被控对象的数学模型;是一种反映人类智慧思维的智能控制;易被人们所接受;构造容易;鲁棒性好。 最优控制结课心得体会 最优控制理论的形成和发展和整个现代自动控制理论的形成和发展十分不开的。在20世纪50年代初期,就有人开始发表从工程观点研究最短时间控制问题的文章,尽管其最优性的证明多半借助于几何图形,仅带有启发性质,但毕竟为发展现代控制理论提供了第一批实际模型。由于最优控制问题引人注目的严格表述形式,特别是空间技术的迫切需求,从而吸引了大批科学家的密切注意。 非常荣幸今年能够在刘老师班中学习最优控制这门课程,在这门课上,我们了解了最优控制是系统设计的一种方法,研究的中心问题是如何选择控制信号(控制策略),才能保证控制系统的性能在某种意义下最优。而最优控制是现代控制理论的核心,它研究的主要问题是:在满足一定约束条件下,寻求最优控制策略,使得性能指标取极大值或极小值。 使控制系统的性能指标实现最优化的基本条件和综合方法,可概括为:对一个受控的动力学系统或运动过程,从一类允许的控制方案中找出一个最优的控制方案,使系统的运动在由某个初始状态转移到指定的目标状态的同时,其性能指标值为最优。这类问题广泛存在于技术领域或社会问题中。例如,确定一个最优控制方式使空间飞行器由一个轨道转换到另一轨道过程中燃料消耗最少。最优控制理论是50年代中期在空间技术的推动下开始形成和发展起来的。美国学者R.贝尔曼1957年提出的动态规划和前苏联学者L.S.庞特里亚金1958年提出的极大值原理,两者的创立仅相差一年左右。对最优控制理论的形成和发展起了重要的作用。线性系统在二次型性能指标下的最优控制问题则是R.E.卡尔曼在60年代初提出和解决的。 从数学上看,确定最优控制问题可以表述为:在运动方程和允许控制范围的约束下,对以控制函数和运动状态为变量的性能指标函数(称为泛函)求取极值(极大值或极小值)。解决最优控制问题的主要方法有古典变分法(对泛函求极值的一种数学方法)、极小值原理和动态规划。最优控制已被应用于综合和设计最速控制系统、最省燃料控制系统、最小能耗控制系统、线性调节器等。解决最优控制问题的主要方法有古典变分法、极小值原理和动态规划。 通过学习我们了解到:最优控制是一门比较新兴的学科,也是一门富有朝气的学说。但是,随着社会科技的不断进步,最优控制理的应用领域十分广泛,如时间最短、能耗最小、线性二次型指标最优、跟踪问题、调节问题和伺服机构问题等。但它在理论上还有不完善的地方,其中两个重要的问题就是优化算法中的鲁棒性问题和最优化算法的简化和实用性问 第5章 模糊控制器设计的基本方法 5.1 模糊控制器的结构设计 结构设计:确定输入、输出变量的个数(几入几出)。 5.2 模糊控制规则设计 1. 语言变量词集 {}PB PM PS O NS NM NB ,,,,,, 2. 确立模糊集隶属函数(赋值表) 3. 建立模糊控制规则,几种基本语句形式: 若A 则B c R A B A E =?+? 若A 则B 否则C c R A B A C =?+? 若A 或B 且C 或D 则E ()()R A B E C D E =+?+????????? 4. 建立控制规则表 5.3 模糊化方法及解模糊化方法 模糊化方法 1. 将[]b a ,内精确量离散化为[]n n +-,内的模糊量 2. 将其区间精确量x 模糊化为一个单点集,即0)(,1)(==x x μμ 模糊推理及非模糊化方法 1. MIN-MAX ——重心法 11112222n 00R and R and R and and '? n n n A B C A B C A B C x y c →→→→= 三步曲: 取最小 1111'()()()()c A o B o C z x y z μμμμ=∧∧ 取最大 12''''()()()()n c c c c z z z z μμμμ=∨∨∨ 2. 最大隶属度法 例: 10.3 0.80.5 0.511234 5 C =+----- +++,选3-=*u 20.30.80.40.21101234 5 C =+ +++ + ,选 5.12 21=+=*u 5.4 论域、量化因子及比例因子选择 论域:模糊变量的取值范围 基本论域:精确量的取值范围 误差量化因子:e e x n k /= 比例因子:e y k u u /= 误差变化量化因子:c c x m k /= 5.5 模糊控制算法的流程 m j n i C u B EC A E ij j i ,,2,1;,,2,1 then then if ===== 其中 i A 、 j B 、ij C 是定义在误差、误差变化和控制量论域X 、Y 、Z 上的模糊集合,则该语句所表示的模糊关系为 j i ij j i C B A R ,??= m j n i j i C B A R z y x z y x ij j i ===== ,1 ,1)()()(),,(μμμ μ 根据模糊推理合成规则可得:R B A U )(?= Y y X x B A R U y x z y x z ∈∈=)()(),,()(μμμμ 设论域{}{}{}l m n z z z Z y y y x x x X ,,,,,,,Y ,,,,212121 ===,则X ,Y ,Z 上的模糊集合分别为一个n ,m 和l 元的模糊向量,而描述控制规则的模糊关系R 为一个m n ?行l 列矩阵。 由i x 及i y 可算出ij u ,对所有X ,Y 中元素所有组合全部计算出相应的控制量变化值,可写成矩阵()ij n m u ?,制成的表即为查询表或称为模糊控制表。 * 模糊控制器设计举例(二维模糊控制器) 1. 结构设计:二维模糊控制器,即二输入一输出。 2. 模糊控制规则:共21条语句,其中第一条规则为 t h e n o r and or if :1 PB u NM NB EC NM NB E R === 3. 对模糊变量E ,EC ,u 赋值(见教材中的表) 程序运行结果: 输出量的模糊集合表 U_control = Columns 1 through 8 -5.3500 -5.2353 -5.3500 -5.2353 -5.3500 -5.2353 -4.6923 -4.2581 -5.0000 -4.9474 -5.0000 -4.9474 -5.0000 -4.9474 -3.8571 -3.7143 -4.6923 -4.5217 -4.6923 -4.5217 -4.6923 -4.5217 -3.0526 -2.9302 -4.2581 -4.2581 -4.2581 -4.2581 -4.2581 -4.2581 -2.9302 -2.2909 -4.0000 -4.0000 -3.7812 -3.7586 -3.4706 -3.4194 -2.4318 -1.7925 -4.0000 -4.0000 -3.3636 -3.0769 -2.4667 -2.1176 -1.5000 -1.0476 -3.5882 -3.5484 -2.9250 -2.6000 -0.9600 -0.5094 0 0.5094 -2.9231 -2.9231 -2.3333 -1.9057 -0.2632 1.0476 1.5000 2.1176 -1.8056 -1.7879 -0.5652 -0.3137 0.4400 1.7925 2.4318 3.4194 -1.0000 -1.0000 0.2453 0.9385 1.4211 2.2909 2.9302 4.2581 -0.5833 -0.6364 0.6875 1.4211 1.9375 2.9302 3.0526 4.5217 -0.2333 -0.2414 1.1190 1.7925 2.3571 3.7143 3.8571 4.9474 0 0 1.2857 2.0000 2.7143 4.2581 4.6923 5.2353 Columns 9 through 13 -2.7143 -2.0000 -1.2857 0 0 -2.3571 -1.7925 -1.1190 0.2414 0.2333 -1.9375 -1.4211 -0.6875 0.6364 0.5833 -1.4211 -0.9385 -0.2453 1.0000 1.0000 -0.4400 -0.0364 0.1600 1.6000 1.6316 0.2632 1.9057 2.3333 2.9231 2.9231 0.9600 2.6000 2.9250 3.5484 3.5882 2.4667 3.0769 3.3636 4.0000 4.0000 3.4706 3.7586 3.7813 4.0000 4.0000 4.2581 4.2581 4.2581 4.2581 4.2581 4.6923 4.5217 4.6923 4.5217 4.6923 5.0000 4.9474 5.0000 4.9474 5.0000 5.3500 5.2353 5.3500 5.2353 5.3500 北京工业大学 结课论文 课题名称:基于模糊控制的机器人避障 姓名:鑫元 12521121 唐堂 12521130 成绩: 引言 智能小车是移动机器人的一种,可通过计算机编程来实现其对行驶方向、启停以及速度的控制。要想让智能小车在行驶过程中能成功地避开障碍物,必须对其进行路径规划?,路径规划的任务是为小车规划一条从起始点到目标点的无碰路径。路径规划方法有:BP人工神经网络法(Back Propagation)、机器学习(Reinforcement Learning)、以及模糊控制(Fuzzy Control)方法等。模糊技术具有人类智能的模糊性和推理能力,在路径规划中,模糊推理的应用主要体现在基于行为的导航方式上,即将机器人的运动过程分解为避障、边界跟踪、调速、目标制导等基本行为,各基本行为的激活由不同的机构分别控制,机器人的最终操作由高层控制机构对基本行为进行平衡后作出综合反应。模糊控制方法将信息获取和模糊推理过程有机结合,其优点在于不依赖机器人的动力学、运动学模型,系统控制融入了人类经验,同时计算量小,构成方法较为简单,节省系统资源,实时性。本文探讨了模糊控制技术在避障路径规划中的应用,并对其进行了仿真设计。 摘要 基于MATLAB的仿真结果表明模糊逻辑推理方法在智能小车的导航控制中具有良好的效果。 目录 引言,摘要 (1) 1.模糊控制技术基本理 (3) 2模糊控制器设计 (4) 3.避障算法设计 (6) 4 仿真实验 (14) 5.实验截图 (17) 6. 结论 (19) 7.实验心得 (20) 8.参考文献 (22) 1模糊控制技术基本原理 环境中存在障碍物时,路径规划控制系统具有高度不确定性,是一个多输入多输出(MIMO)系统。对于这种具有高度不确定性的MIMO系统,传统的控制方法不能达到很好的控制效果。模糊推理控制方法将人类的驾驶经验融入系统控制之中,因此可以较好地满足系统自适应性、鲁棒性和实时性的要求。模糊控制方式借助模糊数学这一工具通过推理来实现控制。模糊逻辑模拟了人类思维的模糊性,它采用与人类语言相近的语言变量进行推理,因此借助这一工具可将人类的控制经验融人系统控制之中,使得系统可以像有经验的操作者一样去控制复杂、激励不明的系统。总的说来模糊控制具有以下特点: 1)不依赖于被控对象的精确数学模型,易于对不确定性系统进行控制; 2)易于控制、易于掌握的较理想非线性控制器,是一种语言控制器; 3)抗干扰能力强,响应速磨陕,并对系统参数的变化有较强的鲁棒性。 模糊控制器的基本结构由模糊输入接口、模糊推理以及模糊输出接口三个模块组成。模糊输入接口的主要功能是实现精确量的模糊化,即把物理量的精确值转换成语言变量值。语言变量的分档根据实际情况而定,一般分为3—7档,档数越多,控制精度越高,计算量也越大。模糊推理决策机构的主要功能是模仿人的思维特征,根据总结人工控制策略取得的语言控制规则进行模糊推理,并决策出模糊输出控制量。模糊输出接口的主要功能是把输出模糊量转化为精确量,施于被控对象。 2模糊控制器设计 模糊控制的基本原理 模糊控制是以模糊集合理论、模糊语言及模糊逻辑为基础的控制,它是 模糊数学在控制系统中的应用,是一种非线性智能控制。 模糊控制是利用人的知识对控制对象进行控制的一种方法,通常用“if条件,then结果”的形式来表现,所以又通俗地称为语言控制。一般用于无法以 严密的数学表示的控制对象模型,即可利用人(熟练专家)的经验和知识来很好 地控制。因此,利用人的智力,模糊地进行系统控制的方法就是模糊控制。模 糊控制的基本原理如图所示: 模糊控制系统原理框图 它的核心部分为模糊控制器。模糊控制器的控制规律由计算机的程序实现,实现一步模糊控制算法的过程是:微机采样获取被控制量的精确值,然后将此量与给定值比较得到误差信号E;一般选误差信号E作为模糊控制器的一个输入量,把E的精确量进行模糊量化变成模糊量,误差E的模糊量可用相应的模糊语言表示;从而得到误差E的模糊语言集合的一个子集e(e实际上是一个模糊向量); 再由e和模糊控制规则R(模糊关系)根据推理的合成规则进行模糊决策,得到模糊控制量u为: 式中u为一个模糊量;为了对被控对象施加精确的控制,还需要将模糊量u 进行非模糊化处理转换为精确量:得到精确数字量后,经数模转换变为精确的模拟量送给执行机构,对被控对象进行一步控制;然后,进行第二次采样,完成第二步控制……。这样循环下去,就实现了被控对象的模糊控制。 模糊控制(Fuzzy Control)是以模糊集合理论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制。模糊控制同常规的控制方案相比,主要特点有: (1)模糊控制只要求掌握现场操作人员或有关专家的经验、知识或操作数据,不需要建立过程的数学模型,所以适用于不易获得精确数学模型的被控过程,或结构参数不很清楚等场合。 (2)模糊控制是一种语言变量控制器,其控制规则只用语言变量的形式定性的表达,不用传递函数与状态方程,只要对人们的经验加以总结,进而从中提炼出规则,直接给出语言变量,再应用推理方法进行观察与控制。 (3)系统的鲁棒性强,尤其适用于时变、非线性、时延系统的控制。 (4)从不同的观点出发,可以设计不同的目标函数,其语言控制规则分别是独立的,但是整个系统的设计可得到总体的协调控制。 它是处理推理系统和控制系统中不精确和不确定性问题的一种有效方法,同时也构成了智能控制的重要组成部分。 模糊控制器的组成框图主要分为三部分:精确量的模糊化,规则库模糊推理, 模糊控制表推导过程 Company Document number:WUUT-WUUY-WBBGB-BWYTT-1982GT 一、模糊划分及模糊化 对于偏差e的模糊划分取NB、NS、ZE、PS、PB五个模糊量,并且在相邻的模糊量中,存在如下关系: 1)、本模糊量的隶属度最大的元素,是相邻模糊量的隶属度为0的元素。 2)、模糊量的形状是等腰三角形。 3)、论域为[-X,X]. 二、论域变换 1、偏差e的论域变换 偏差e的论域是[-X,X],欲把它变换成离散论域[-3,-2,-1,0,1,2,3],则有量化因子qe: qe=6/2X=3/X 显然,对于元素-X、-2X/3、-X/3、0、X/3、2X/3、X,则有相应的离散论域元素ei: e1=qe*(-X-0)=-3 e2=qe*(-2X/3-0)=-2 e3=qe*(-X/3-0)=-1 e4=qe*(0-0)=0 e5=qe*(X/3-0)=1 e6=qe*(2X/3-0)= 2 e7=qe*(X-0)=3 1、偏差变化率de的论域变换 偏差变化率de的论域是[-Y,Y],欲把它变换成离散论域[-3,-2,-1,0,1,2,3],则有量化因子qde: qde=6/2Y=3/Y 显然,对于元素-Y、-2Y/3、-Y/3、0、Y/3、2Y/3、Y,则有相应的离散论域元素dei: de1=qde*(-Y-0)=-3 de2=qde*(-2Y/3-0)=-2 de3=qde*(-Y/3-0)=-1 de4=qde*(0-0)=0 de5=qde*(Y/3-0)=1 de6=qde*(2Y/3-0)= 2 de7=qde*(Y-0)=3 1、 由于s12xs没有了模糊指令,使单片机运用模糊控制增加了不少难度,但经过研究发现,还是可以通过matlab接口来实现的,本人也在努力中,希望有更多的人来共同研究~ 对于实际模糊控制系统,由于在高级语言中模糊控制程序的实现比较复杂,因 此引入模糊控制存在一定的困难,程序代码的过于复杂也会严重影响模糊控制系 统的开发周期。而Matlab 系统及其工具箱中提供了一些能够独立完成某些Matlab 功能的C/C++库函数,这些库函数可以直接应用到C/C++平台中,脱离系统完成 Matlab 某些功能,极大的方便了实际应用。Matlab Fuzzy Logic 工具箱的独立C 代码就是一个这样的C 语言库[1]。 独立的C 代码模糊推理引擎函数库fis.c 位于Matlab 目录下的 toolbox\fuzzy\fuzzy 目录中,它包含了在C 语言环境下调用Matlab Fuzzy Logic 工具箱建立的模糊推理系统的数据文件(*.fis)进行模糊逻辑推理的一系列C 函 数,其基本原理是利用C 代码实现Matlab 中的模糊推理系统(FIS)功能。该目录 下还有一个C 代码程序fismain.c,它实际上是利用fis.c 库函数来实现模糊推理系 统的一个实例。 正确地熟悉了fis.c 库函数中的函数定义,在应用程序中正确调用,即可实 现模糊推理系统功能。例如,从Matlab 的模糊推理系统文件(*.fis)读入系统数据, 可用下面的语句:fisMatrix=returnFismatrix(fis_file,&fis_row_n,&fis_col_n);建立基于C 代码的模糊推理系统,可用下面的语句: fisBuildFisNode(fis,fisMatrix,fis_col_n,MF_POINT_N)。 但是需要说明的是,在独立C代码函数库fis.c 中只定义了Matlab Fuzzy Logic 工具箱的11 种隶属函数以及AND、OR、IMP 和AGG 四种逻辑操作函数。所以 在利用Matlab 的模糊逻辑工具箱建立用于独立C 代码引擎的模糊推理系统时, 不允许采用自定义的隶属度函数和逻辑操作函数来设计系统,除非修改fis.c 函 数库[2]。 设计基于独立的C 代码模糊推理引擎的模糊控制程序主要有以下两个步骤: (1) 利用Matlab 的模糊逻辑工具箱建立一个模糊推理系统,并将系统存 为扩展名为fis 的数据文件。注意只能使用Matlab 定义的隶属度函数 和逻辑操作函数, (2) 在C 语言应用程序中实现Matlab 中定义的模糊推理系统功能。两者之间的接 口就是独立C 代码模糊推理引擎函数库fis.c。 2、 基于S12的模糊控制调试心得 小可不才在博客发了一篇有关S12的模糊控制的日志(《MC9S12DG128模糊控制崩溃之旅》)。并跟一些志同道合的网友展开了较为深入的讨论。现应部分网友同仁的要求将我调试成功的心得体会写在如下,由于本人也只是懂得一些皮毛,而且有很多问题并未深究,难免有不妥或错误之处,还请各位包涵并指正,谢谢! 在此以飞思卡尔智能小车的方向控制为例,文中可能会提到一些变量,但不会对该变量作深入的探究,敬请原谅!模糊控制理论外文文献翻译
模糊控制表推导过程
基于模糊控制的速度跟踪控制问题(C语言以及MATLAB仿真实现)
简易模糊控制器设计及MATLAB仿真
过程控制考试总结
基于simulink的模糊控制仿真
模糊控制器的设计
最优控制结课心得体会
模糊控制器设计的基本方法
matlab计算模糊控制规则表
模糊控制用于机器人避障
模糊控制的基本原理
模糊控制表推导过程
模糊控制
相关主题
文本预览