
高
空作业设备带有折叠臂架的一般都采用在臂体外部使用往复液压油缸输出摆角,以达到变幅目的。这种方
法输出的摆角一般都比较小,达不到大摆角输出目的,同时液压油缸在臂架外部,这样有时会影响运动范围,造成使用不便。工作平台平衡系统大都也采用液压缸单独推动工作平台调平,造成调平角度也大都不大于90°。本文介绍采用组合臂内置的2套连杆机构的设计、分析方法。
折叠臂变幅杆系机构设计
设计要求及技术参数
GKHS35E 型高空作业车最大作业高度为35m 。折叠臂长度2.84m ,工作平台载荷360kg ,工作平台、连接部件、电气系统质量共90kg ,折叠臂变幅角度为连续110°,工作平台平衡机构输出角度为连续190°,液压油缸安装空间高度范围270mm 。
高空作业设备折叠臂架连杆传动及平台平衡杆系机构设计
文 /李 峰 贺淑艳 王 飞 牛喜元 李 勇 吕继军
GKHS35E 型高空作业车
折叠臂变幅机构杆系设计
折叠臂变幅机构经过分析,变幅机构及工作平台平衡机构均采用四杆机构,使用液压油缸输入。
传统的通过四杆机构设计常采用按照输入、输出3个角度位置加1杆长条件,3连杆位置,插值函数,连杆图谱等方法……这些方法对于有些工程计算比较复杂,考虑情况比较多,而且本次设计只要求一定的输出变幅角度及一定的最小压力角及适应安装空间,不需要十分精确位置控制。下面介
绍一种通过3D 软件图形计算相对简单的,适合工程应用的方法来设计四杆机构。
考虑到系统是由液压油缸输入。我们设输入杆的输入角度为60°,输出杆输出变幅角度为设计要求的110°。根据同折叠臂连接的伸缩臂截面尺寸为277×266mm 我们可选择机架长度为220mm ,选择驱动摇杆长为380mm ,设初始驱动摇杆同机架夹角为80°。这样确定如下已知条件。
S
PECIAL VEHICLES
特种车辆
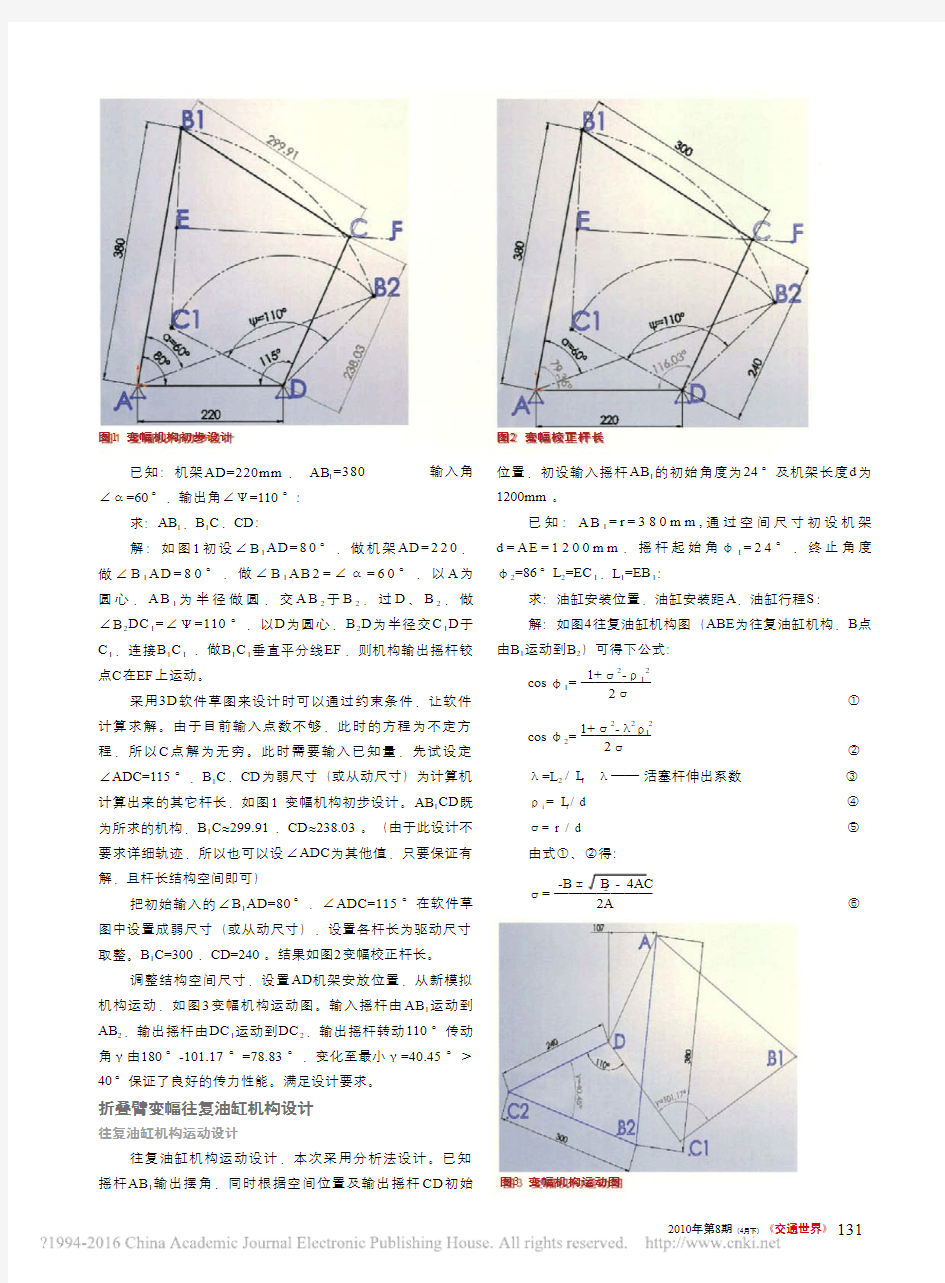
已知:机架AD=220mm , AB 1=380 输入角∠α=60°,输出角∠Ψ=110°;
求:AB 1,B 1C ,CD ;
解:如图1初设∠B 1A D =80°,做机架A D =220,做∠B 1A D =80°,做∠B 1A B 2=∠α=60°,以A 为圆心,A B 1为半径做圆,交A B 2于B 2,过D 、B 2,做∠B 2DC 1=∠Ψ=110°,以D 为圆心,B 2D 为半径交C 1D 于C 1,连接B 1C 1 ,做B 1C 1垂直平分线EF ,则机构输出摇杆铰点C 在EF 上运动。
采用3D 软件草图来设计时可以通过约束条件,让软件计算求解。由于目前输入点数不够,此时的方程为不定方程,所以C 点解为无穷。此时需要输入已知量,先试设定∠ADC=115°,B 1C ,CD 为弱尺寸(或从动尺寸)为计算机计算出来的其它杆长,如图1 变幅机构初步设计。AB 1CD 既为所求的机构,B 1C ≈299.91,CD ≈238.03。(由于此设计不要求详细轨迹,所以也可以设∠ADC 为其他值,只要保证有解,且杆长结构空间即可)
把初始输入的∠B 1AD=80°,∠ADC=115°在软件草图中设置成弱尺寸(或从动尺寸),设置各杆长为驱动尺寸取整。B 1C=300,CD=240。结果如图2变幅校正杆长。
调整结构空间尺寸,设置AD 机架安放位置,从新模拟机构运动,如图3变幅机构运动图。输入摇杆由AB 1运动到AB 2,输出摇杆由DC 1运动到DC 2,输出摇杆转动110°传动角γ由180°-101.17°=78.83°,变化至最小γ=40.45°>40°保证了良好的传力性能。满足设计要求。
折叠臂变幅往复油缸机构设计
往复油缸机构运动设计
往复油缸机构运动设计,本次采用分析法设计。已知摇杆AB 1输出摆角,同时根据空间位置及输出摇杆CD 初始
位置,初设输入摇杆AB 1的初始角度为24°及机架长度d 为1200mm 。
已知:A B 1=r =380m m ,通过空间尺寸初设机架d =A E =1200m m ,摇杆起始角φ1=24°,终止角度φ2=86°L 2=EC 1,L 1=EB 1;
求:油缸安装位置,油缸安装距A ,油缸行程S ;解:如图4往复油缸机构图(ABE 为往复油缸机构,B 点由B 1运动到B 2)可得下公式:
①
②
λ=L 2 / L 1 λ—— 活塞杆伸出系数 ③ρi = L i / d ④σ= r / d ⑤由式①、②得:
⑥图1 变幅机构初步设计图2 变幅校正杆长
图3 变幅机构运动图
cos φ1= —————
1+σ2-ρ12
2σcos φ2= —————
1+σ2-λ2
ρ1
22σσ= ———————
-B ± B 2 - 4AC
2A
⑦ ⑧把d=1200,r=380代入⑤得:σ= r / d = 380/1200≈0.3167把σ=0.3167代入式⑧得:
ρ1 ≈0.7223
L 1 =ρ1· d = 0.7223×1200≈866.67把式⑦代入式⑥消去A 、B 、C 得到关于λ的1元4次方程,化简方程得:
0.5217λ4 - 1.5778λ2 + 1.0561λ+1.0561=0
可通过求解1元4次方程公式,或使用MATLABE 等软件对方程求解。舍去无效解,最后取λ≈1.422
图4 往复油缸机构初设计
图5 往复油缸机构最终设计
图6 变幅机构
A = C =λ2- 1
B = -2(λ2
cos φ1 - cos φ2)
ρi = 1+σ2- 2σcos φi ρ1 = 1+0.31672 - 2×0.3167×cos24°
S
PECIAL VEHICLES
特种车辆
把λ=1.422代入式③得
L 2 = λ· L 1 = 1.422×866.67≈1232.17也可通过作图连接EC 1或把φ2角度代入⑧得出ρ2在通过④式得L 2=1232.17这与计算结果一致。就是说如果已知摇杆角度既可通过⑧、④式计算出油缸行程或由油缸行程求得铰点的精确位置。
油缸安装距:A= L 1≈867mm ; 油缸行程:
S= L 2 - L 1 =1232.17 - 866.67≈366mm 在实际工程应用中,为了方便加工制造对于油缸铰点E 的位置进行调整。考虑加工时以D 点为基准进行加工。使E 点相对于D 点的坐标x ,y 为1285mm ,39mm 最后E 点位置如图5往复油缸机构最终设计,最后确认油缸数据,校正后的油缸行程及安装距为:
A= L 1≈867mm S= L 2 - L 1 =1232.23 - 866.89≈365mm 注意如空间允许情况下,使用已知量摇杆r (AB1)及根据油缸活塞杆伸出系数λ,通过式③、⑤、⑥、⑦、⑧来计算机架d(AE)、L 1、L 2。油缸活塞杆伸出系数λ一般可以取1.5 1.7之间,但此例λ不在此范围内就必须在液压油缸参数确定之后使用欧拉公式对油缸杆稳定性进行校核。往复油缸机构油缸设计
在机构设计之后需要确定输出摇杆负载。通过3D 设计软件对负载进行建模,这样可以很方便、准确的计算出负载的质量及重心位置。折叠臂变幅机构的输出摇杆所输出的是扭矩,所以必须确认负载扭矩,再计算出油缸推力,最后选择油缸尺寸,并通过3D 模型校核干涉等。
机构负载计算
如图6变幅机构负载,经过分析,当伸缩臂水平,折叠臂达到110°变幅时(最大作业幅度)输出摇杆CD 的输出扭矩最大,相应的油缸推力最大。主要产生扭矩的负载为折叠臂质量负载m 1,工作平台自重m 2,1.5倍的工作平台载荷m 3。
已知:m 1≈218k g (包括管线、电气件、标准件等),m 2≈70kg ,m 3=320×1.5=480kg ,它们重心相对于回转中心D 的距离分别为:L 1=2025mm=2.025m ,L 2=3550mm=3.55m ,L 3=3900mm=3.9m 。
求:输出摇杆CD 的负载力矩Mr 解:如图6Mr =ΣM i
Mr =G 1L 1+G 2L 2+G 3L 3 Mr = 25107.11N·m 机构受力分析
使用矢量方程解析法对四杆机构进行受力分析。如图7变幅机构受力分析。
已知:Mr= 25108N·m ,CD=l 1=220mm=0.22m ,B C =l 2=300m m =0.3m ,摇杆C D 极位时同x 轴夹角
∠θ1=39.09°,油缸推力F 与x 轴夹角∠θ2 =51.34°。
求:推力F
解:(1)取CD 杆为分离体,并将该构件上的诸力对D 点取力矩得:
ΣM D = F C · l 1t - Mr
= F Cx · l 1sin θ1+ F Cy · l 1cos θ1 - Mr
=0 ⑨ (2)同理取BC 杆为分离体, 由于BC 杆上无其他负载,所以只满足∑F=0即可,则得:
ΣF= F B - F C =0
ΣF y = F By - F Cy =0 F cos θ2 - F Cx =0
ΣF x = F Bx - F Cx =0 F sin θ2 - F Cy =0 ⑩ 由式⑨、⑩得:
F cos θ2 · l 1sin θ1+ F sin θ2 · l 1cos θ1 - Mr =0将已知条件代入上式得:F =114128N
由于连杆无负载可能的动载荷及惯性力和摩擦结果会比实际小,所以实际使用过程中输入推力要略大。
油缸参数计算
初算油缸最大推力为114128N ,
可以根据液压系统压力确定油缸缸筒内径D ,由公式:D — 活塞杆内径,m F — 油缸推力,N
p — 供油压力,MPa (取18MPa )
考虑初算结果没有计算惯性力、摩擦力及计算、设备加工制造误差,可能的震动应力,工程使用成本等因素,决定缸筒内径尽量选择标准、通用型号,选取HSG 系列工程液压缸D=125mm 。满足安全要求。
图7 变幅机构受力分析
D = —— ×10-3≈0.089m
4F
π·ρ
通过3D 模型及各参数选择油缸杆直径d 。通过模型发现d >63mm 会发生干涉,修改其他尺寸容易影响整体强度,最后确定d=63mm 。使用欧拉公式进行稳定性校核,符合要求。由于选择d=63mm 会造成液压缸活塞往复运动时的速比φ较小。这样在制造油缸时必须选择高强度材料。
工作平台调平杆系机构设计
设计要求及技术参数
此设备折叠臂加主臂的变幅角度为190°,这就要求工作平台调平机构输出不能小于190°的变幅角度,这样才能保证高空作业设备工作平台水平。整套变幅机构要求在折叠臂内部。折叠臂内部尺寸为211×158mm ,与变幅机构设计采用基本相同方法,但是由于输出角度较大设计时必须以传动角γ为设计基准之一。确定基本已知条件,机架根据臂体空间设为205mm ;输入连杆的输入角度为85° 90°;输出角度为Ψ≥190°;传动角γ>35°。
已知:机架AD=205mm ;设输入摇杆AB 1=320mm ,输入角∠α=90°,输出角∠Ψ≥190°,传动角∠γ>35°。
求:AB 1、B 1C 、CD 、
解:图8调平机构初步设计,初设∠B 1A D =70°,做A D =205,做∠B 1AD=70°,做∠B 1AB 2=∠α=90°,以A 为圆心,AB 1为半径做圆,交AB 2于B 2,以D 为顶点,做∠Ψ=190°,以D 为圆心,B 2D 为半径做圆,交C 1D 于C 1,连接B 1C 1 ,做B 1C 1垂直平分线EF ,机构输出摇杆铰点C 在EF 上运动。做∠CDC 2=∠Ψ=190°,CD=C 2D ,连接C 2、B 2点则角∠CDC 2=∠γ
设置约束条件。由于目前输入点数不够,此时的方程为不定方程,所以C 点解为无穷。此时需要输入已知量,按照机构传动要求,试输入∠γ=40°。设计草图公式驱动∠CDC 2=∠Ψ=190°。这样得到初步的设计结果;如果放置空间允许各杆长,则机构AB 1CD 达到要求机构。
由于设计中不要求精确设计输入、输出对应关系,都是在范围变动,所以可以调整驱动几何关系;为了方便制造,对于B 1C ,CD 取整,AB 1由于实际空间允许,可以不变;取AB 1=220,CD=190如图9调平机构调整设计,设计中AB 1的启始角度可以根据实际情况适当变动所以先设置∠B 1AD 为从动尺寸,再设置输出角度∠Ψ为从动,这样才不会导致图形过定义(计算输入条件过多无法解出);通过图形及输入油缸位置设输入角∠α=87°。
如图9最后经过调整,AB 1=320,B 1C=220,CD=190,启始角从动为∠B 1AD ≈71.36°,输入角∠α=87°,输出角随计算结果从动为∠CDC 2=∠Ψ≈189.97°,传动角从动∠CDC 2=∠γ≈37.4°;这个机构的杆长条件完全可以达到设备使用要求。
最后机构运动图如图10调平机构运动图,由设备结构最后确定A 点及C 点相对D 的位置;最后输入
连杆A B 的B 点运动到B 1点,输出连杆C D 的C 点运动到C 1;当输出角∠Ψ=∠C D C 1=190°时,输入角∠α=∠BAB 1≈87.18°<90°,传动角∠γ≈35.1°>35°;都达到设计要求。
折叠臂变幅往复油缸机构设计
往复油缸机构运动设计
工作平台调平机构与折叠臂变幅机构的驱动机构相同,都是使用液压油缸输入。设计计算方法同上,由四杆机构模型几何关系,设备尺寸结构,安装、制造实用性等,通过
图8 调平机构初步设计
图9 调平机构调整设计
图10 调平机构运动图
S
PECIAL VEHICLES
特种车辆
1.3.1章节公式设计得出。最后机构设计结果如图11往复油缸机构最终设计。往复油缸机构油缸设计
往复油缸机构计算同上章节,负载主要仍为Mr 转矩,Mr 由工作平台及其拖架自重和工作平台负载产生,由3D 模型可较准确的计算出以上3项负载相对于铰点产生的力矩。
如图12调平机构负载,这种大角度输出则需要D 铰点采用断轴设计,以免发生干涉;CD 为输出连杆,B 铰点为油缸输出点。则机构负载为:
Mr = G 1L 1 + G 2L 2
Mr 由工作平台及托架自重G 1对D 取矩与工作平台负载G 2
对D 取矩之和。
通过定性分析得出油缸输出力最大的情况,并且油缸输出力为拉力;按照位置关系使用矢量方程解析法对机构进行分析。
如图13,使用1.3.2.2章节方法列方程进行分析计算得
出最大拉力F 。
计算为无负载可能的动载荷及惯性力和摩擦的结果,会比实际略小。所以实际使用过程中输入拉力要略大。
按照油缸所需拉力通过液压系统压力用下式计算油缸缸杆及缸桶。
m
同样是考虑初算结果没有计算惯性力、摩擦力及计算、设备加工制造误差,可能的震动应力,工程使用成本等因素,决定选取HSG 系列工程液压缸D=75mm ,杆径d=40mm 满足需要;使用欧拉公式进行稳定性校核,符合安全性要求。
结论
以往的机构设计机构采用各种计算方法比较复杂,而且计算出之后不能马上结合其他结构,导致反复的验证、计算、调整等问题。不光费时,而且计算也比较复杂,有些定量的计算方法普通工程师难以掌握。由于计算机技术的发展、3D 软件的应用,通过计算机的约束条件,直接计算出机构结果,并且可以直接效验结构关系等相关问题。本文的这种连杆机构的设计方法简单,对于应用在高空作业车这种变幅和调平机构非常合适,有较大摆角输出。驱动油缸均在组合臂内部,避免了油缸可能干涉其他结构的情况,另外油缸内置也使设备外型美观,并且安全性提高,初期的简单人工力学计算可以为确定总体设计方案提供依据,也成为后期建立3D 模型进行虚拟养机计算提供基础。
作者单位:李 峰 贺淑艳 王飞 牛喜元 李 勇 ——沈阳北方交通重工集团 高空研究所
吕继军——浙江中控技术股份有限公司
图11 往复油缸机构最终设计
图12 调平机构负载
图13 调平机构受力分析
D = ————— + d
4F
π·ρ×10-6
高处作业 1.高处作业基本要求 1.1本规范所指的高处作业,应符合GB/T3608-2008《高处作业分级》规定的“凡在坠落高度基准面2m以上(含2m)有可能坠落的高处进行的作业”。 1.2进行高处作业时,除执行本规范外,还应符合国家现行的有关高处作业及安全技术标准的规定。 1.3本规范只适用于生产制造型企业日常生产、维护、检修等工作,土方、基建、改造等应按照JGJ80-2016《建筑施工高处作业安全技术规范》执行。 1.4各企业应对高处出作业建立相应的安全责任制和制定相应的安全技术操作规程。 1.5高处作业前应进行专项的安全教育与技术交底,落实安全技术措施和人员劳动防护用品。 1.6高处作业中所使用的安全标志、安全装备、工具、仪表、设备设施,必须在作业前进行检查,确认完好方可投入使用。 1.7攀登与悬空高处作业人员必须经过专业技术培训及考试,取得高处作业许可证,并定期进行身体健康检查后方可投入作业。 1.8高处作业过程中发现安全技术措施有缺陷或隐患时,应立即解决;危及人身安全时必须停止作业。 1.9高处作业现场有坠落可能的物件应先加以固定或拆除,传递物件禁止抛掷。 1.10雨、雪、浓雾、六级以上强风等额、恶劣天气应停止户外高处作业。因抢险、救灾等特殊情况必须进行高处作业的,必须采取切实可靠的防滑、防冻、防雷等措施。 1.11应作业需要,临时拆除或变动安全防护设施时,必须经安全部门同意并采取相应的可靠措施,作业后立即恢复。 2.临边与洞口作业 2.1临边高处作业必须设置防止人员坠落的安全防护措施。 2.2长期临边高处作业可在存在坠落可能的的一侧设置防护栏杆、防护挡板等固定式安全措施,其形式、强度满足JGJ80-2016《建筑施工高处作业安全技术规范》的要求。
自行式高空作业平台操作须知 高空作业是一项危险系数较高的工作,不仅要求工作人员有较高的技术水平,还需要把硬件----高空作业平台调整到最佳作业状态,这样才能安全工作两不误。 一、检查内容 a.电源线是否完好。 b.各按钮是否有效。 c.输油管等有否漏油现象。 d.检查行程开关是否失效(用手将行程开关推进,确认开关的动作)。 e.臂架上各交叉点螺母是否紧固。 二、使用须知 1、升降机的使用 a.按规定载荷工作,严禁超载使用。在特殊应急情况下最多不得超载10%。 b.在没有安全护栏的固定式升降台上严禁载人工作。 c.在动作过程和处于上升位置时,不得移动升降台。 d.升降台工作时,必须撑开支腿。严禁在工作平台上作激烈的人为摇晃。 e.严禁在工作台上进行任何带电作业。 f.发现升降台工作压力过高或声音异常时,应立即停机检查。以免升降台受严重损坏。 2、蓄电池的使用 自行式高空作业平台的蓄电池在使用前应按照使用电流的1/10进行充电3-5个小时,以后每当电力不足时都应按照使用电流的1/10进行充
电。如需急用,可按标准充电电流的二倍进行充电,这样可减少一半的充电时间,在无任何仪器仪表的情况下当发现有大量气泡冒出时充电结束。在不经常使用的情况下也要补充电流然后才能使用,严禁将电全部使用完后才进行充电。 b.电池要远离明火,避免正负极接触、短路或正负极接头松动。请勿用干布擦试电池,以免产生静电火花。请在通风良好处使用或充电,充电时若有火花请松开排气栓。电池充电或在旁边工作时,要注意个人保护。电池内含有硫酸液,应避免接触皮肤、眼睛、衣服。一旦接触,请用大量清水冲洗。 c.为使电池发挥更好的性能和延长使用寿命请注重电池的维护:定期检查液面,如果低于水线时,用蒸馏水或纯净水补至水线,绝不可添加硫酸液,密闭电池无需检查液面及补液。 d.当电池的电压不足且灯光暗淡,起动无力时,应及时进行车外充电。 e.避免用大电流长时间充电,严禁反充电。 f.若充电时充电液温度高于45oC,应立即停止充电,待液温下降后再进行充电。 g.阴暗干燥处贮存,不可靠近热源。 h.直流电瓶为动力源的机器在使用后必须关闭电瓶电源,否则电能耗尽,影响下次使用及电瓶寿命。 本文转载自:威士海叉车:https://www.doczj.com/doc/e513949063.html,/news-104.html,转载请注明。
海上风电高空作业平台设计 摘要:在我国最早的一批海上风电特许权招标项目招标后,由于具有太多不确定因素,我国海上风电的建设速度非常缓慢,缺少较为完善的政策法规,加之风机产品的质量仍不稳定,进而使得我国的海上风电项目建设不能创造出可媲美陆上风电的奇迹。现在让我们把目光放的更长远一些,研究一下3-5年后海上风机出了质保期怎样才能更好地运维保养。本文主要以运行维护为核心,设计高空作业平台对风机进行维护,总述高空作业平台的优势。 关键词:海上风电;高空作业平台;运行维护 一、引言 能源已经是现代人类世界必不可少的重要动力,它将直接和间接地影响到社会经济文明的发展。众所周知,随着全球经济的快速发展,能源的需求量越来越大,传统能源完全不能全部供应发展的需要。风能作为一种极具竞争力的可再生清洁能源,它强有力地改变了世界能源市场结构。风能在几十年的研究发展过程中,已逐步从应用示范转变为实用化。相对于传统的燃煤发电来说,风力发电是没有二氧化碳排放的理想绿色能源。而与陆地风能相比,海上风能特点更为突出,海上年平均风速明显大于陆地,研究表明,由于海面的粗糙度较陆地较小,离海岸10km的海上风速比岸上高
25%以上。世界上越来越多的国家将目光放在了风能资源的开发和利用上,并早已通过相应的技术手段研究着手建设海上风电场,从而使得风能资源的有效利用率更高,建设开发重点利用海上风电项目已成为将来世界风电行业及能源电力行业发展的大势所趋。而我国的海上风电行业目前尚处于刚刚起步发展的阶段,在海上风电场的布机设计、建设施工和生产运营等方面仍存在着很多的问题,本文旨在可以通过建设海上风电高空作业平台的方式来保证海上风电产业的稳步发展。 二、高空作业平台的背景 高空作业平台是用于承载工作人员、工器具或者工作用材到达相应位置,从而进行工作的设备,属于高空作业器械。它主要包括带曲柄机构的工作平台、伸展和保护机构和底盘。其特点主要体现在结构紧凑、作业频率高、自身载荷小,操作灵活简单,并具安全可靠性高、平稳性和微调性好等方面。其中安全性强和作业效率高是高空作业平台的最大特点。高空作业平台除了能进行高空作业外,还具有行走、越障和躲避障碍等功能,更好地迎合了流动性大、机动性强、区域范围广的高空作业要求。 国外对于高空作业平台的研究研发早于国内,至今已有百年多的历史,其产品研发、生产应用已经具有相当成熟的体系,生产企业主要集中在欧美、日本等发达国家。高空
摘要 本课题针对 GKZ 系列车型转台部分的要求工作装置,对GKZ型高空作业车回转机构进行设计及分析。高空作业车由液压马达、回转减速器及回转小齿轮、回转支承等组成。进行回转时,液压马达输出动力,通过回转减速器减速后带动输出轴上的小齿轮旋转,小齿轮与回转支承的齿圈啮合,由于回转支承的齿圈与车架刚性连接,因而回转减速器带动与之相连的转台回转。 本课题确定了高空作业车回转机构的传动方案,采用的单排四点接触球式回转支承,此类支承的主要优点是同时承受轴向、径向力和复合力矩。适用子中小型起重机。转台的结构设计采用的是倒π型结构,前后两个高强板,左右各一个支承板,再加两个加强筋形成。对转台采用PRO/E进行建模,将建好的模型通过转化放入ANSYS中进行有限元分析,分析出变形最大和受应力最大的接触面,对分析的结果的提出改进方案,对改进后的方案进行有限元分析比较, 确定最佳方案。本方案的设计为同类转台的结构设计提供了理论依据和分析方法。 (1)在结构设计过程中主要对转台的的受力在课题设计的过程中使用的方法有: 情况进行分析,计算出转台的受力大小和转台的自重,对传动齿轮的设计及 (2)将模型导入ANSYS中,对转台的强度校核,运用绘图软件PRO/E进行建模。 受力情况进行分析查看其分析的结果,确保转台的变形和所受的应力均能符合设计要求。 关键词:高空作业车;转台结构设计;ANSY
第一章绪论 1.1 引言 工程机械广泛应用于经济建设的各部门,并且在整个经济发展中占有十分重要的地位。解放以后,我国的机械工业在十分薄弱的基础上,经过近五十年的艰苦努力,从小到大,从修配到制造,从仅仅仿造一般机械产品到能制造大型、中型、精密设备,从制造单机到制造重大成套设备,逐步形成了一个门类比较齐全,具有较大规模,较先进技术水平和成套水平不断提高的工业体系。 80 年代以来,工程机械发展速度快。其主要原因:一是我国在改革开放政策指引下,经济发展快,对工程机械的需要增多;二是从中央到地方给与发展的优惠政策,增加资金注入,加以扶植;三是引进国外多项先进技术,经过消化吸收,产品技术水平提高;四是,企业经过组织结构调整,相互合作,并在竞争中促使相互提高。但是我国工程机械与国外工业发达国家相比较以及与国内建设要求相比还有不少差距,还有许多问题 A 待研究解决。随着目前高科技产业的发展,尤其是计算机的出现及其广泛应用,它带动了整个工业的发展,在机械行业更为引人注目,设计上的优化等使机器向高精密化发展,带来了一场新的变革。当然一向以笨重著称的大型工程机械,更有着广阔的发展余地。 高空作业车作为一种大型的工程机械设备,日前广泛应用在船舶、建筑、市政建设、消防、港口货运等行业,是新兴的技术产业,有着广阔的发展前景。高空作业机械是在工程起重机械基础上发展起来的产业系统,只有二十几年的历史。尽管我国在高空作业车设计制造上取得了一些成绩,但是国内生产制造的高空作业机械同国外同类型高空作业机械产品相比仍有一定差距,土要表现为技术含量低、大型的较少、结构笨重、作业时微动性能差等问题。 1.2 高空作业车的国内外发展概况 高空作业车的分类方式有好多种,按臂架的展开方式分类,有折叠式和伸缩式及混合式三种;按臂架的形状分类有,直臂式和曲臂式;按驱动方式分类,有自动式、拖动式和手动式等等。 1.2.1 高空作业车的国外发展趋势与动向下不足; 抽油机在运行中传动角波动较大,无法保证各位置的传动角均接近于90°,造成曲柄轴受力很大且不均匀;由于悬点载荷的变化较大,造成曲柄轴扭矩峰值较大,国外高空作业机械属新兴行业,是在工程起重机械基础卜发展起来的高新技术产业系统,只有二十几年的历史。目前,专业生产高空作业机械的公司比较少。近年来,由于汽车起重机销售量下降及市场平淡,一批汽车起重制造公司,相继发展高空作业机械,但总计年产量仍不能满足市场需求,正处于发展时期。
建筑施工高处作业安全技术规范JGJ80-91 中华人民共和国行业标准 建筑施工高处作业安全技术规范JGJ80—91 主编单位:上海市建筑施工技术研究所 批准部门:中华人民共和国建设部 施行日期:1992年8月1日 关于发布行业标准《建筑施工高处作业安全技术规范》的通知 建标〔1992〕5号 根据原城乡建设环境保护部(86)城科字第263号文的要求,由上海市建筑施工技术研究所主编的《建筑施工高处作业安全技术规范》,业经审查,现批准为行业标准,编号JGJ80—91,自1992年8月1日施行。 本标准由建设部建筑安全标准技术归口单位中国建筑第一工程
局建筑科学研究所归口管理,由上海市建筑施工技术研究所负责解释,由建设部标准定额研究所组织出版。 中华人民共和国建设部 1992年1月8日第一章总则 第1.0.1条为了在建筑施工高处作业中,贯彻安全生产的方针,做到防护要求明确,技术合理和经济适用,制订本规范。 第1.0.2条本规范适用于工业与民用房屋建筑及一般构筑物施工时,高处作业中临边、洞口、攀登、悬空、操作平台及交叉等项作业。 本规范亦适用于其他高处作业的各类洞、坑、沟、槽等工程的施工。 第1.0.3条本规范所称的高处作业,应符合国家标准《高处作业分级》 GB3608—83规定的“凡在坠落高度基准面2m以上(含2m),有可能坠落的高处进行的作业”。 第1.0.4条进行高处作业时,除执行本规范外,尚应符合国家现行的有关高处作业及安全技术标准的规定。 第二章基本规定 第2.0.1条高处作业的安全技术措施及其所需料具,必须列入工程的施工组织设计。 第2.0.2条单位工程施工负责人应对工程的高处作业安全技术负责并建立相应的责任制。 施工前,应逐级进行安全技术教育及交底,落实所有安全技术措施和人身防护用品,未经落实时不得进行施工。 第2.0.3条高处作业中的安全标志、工具、仪表、电气设施和各种设备,必须在施工前加以检查,确认其完好,方能投入使用。 第2.0.4条攀登和悬空高处作业人员以及搭设高处作业安全设施的人员,必须经过专业技术培训及专业考试合格,持证上岗,并必须定期进行体格检查。
文件编号:GD/FS-6232 (解决方案范本系列) 高空作业的基本安全技术 措施详细版 A Specific Measure To Solve A Certain Problem, The Process Includes Determining The Problem Object And Influence Scope, Analyzing The Problem, Cost Planning, And Finally Implementing. 编辑:_________________ 单位:_________________ 日期:_________________
高空作业的基本安全技术措施详细 版 提示语:本解决方案文件适合使用于对某一问题,或行业提出的一个解决问题的具体措施,过程包含确定问题对象和影响范围,分析问题,提出解决问题的办法和建议,成本规划和可行性分析,最后执行。,文档所展示内容即为所得,可在下载完成后直接进行编辑。 1、凡是临边作业,都要在临边处设置防护栏杆,一般上杆离地面高度一般为1.0-1.2m,下杆离地面高度为0.5-0.6m;防护栏杆必须自而下用安全网封闭,或在栏杆下边设置严密固定的高度不低于18cm 的挡脚板或40cm的挡脚笆。 2、对于洞口作业,可根据具体情况采取设防护栏杆、加盖板、张挂安全网与装栅门等措施。 3、进行攀登作业时,作业人员要从规定的通道上下,不能在阳台之间等非规定通道进行攀登,也不
得任意利用吊车车臂架等施工设备进行攀登。 4、进行悬空作业时,要设有牢靠的作业立足处,并视具体情况设防护栏杆,搭设架手架、操作平台,使用马凳,张挂安全网或其他安全措施;作业所用索具、脚手板、吊篮、吊笼、平台等设备,均需经技术鉴定方能使用。 5、进行交叉作业时,注意不得在上下同一垂直方向上操作,下层作业的位置必须处于依上层高度确定的可能坠落范围之外。不符合以上条件时,必须设置安全防护层。 6、结构施工自二层起,凡人员进出的通道口(包括井架、施工电梯的进出口),均应搭设安全防
臂架式高空作业平台设计 1、课题来源 高空作业平台产品在国民经济中所占比例较小,尚没有明确划分产业分类,尽管还缺乏国际性的品牌,但已经形成了种类齐全的高空作业平台产业格局。于2008年,“十一五”国家科技支撑计划《无脚手架安装作业技术装备与产业化开发》重点项目的实施,极大提升了高空作业平台行业的影响力[1]。同时,工业厂房的钢结构化,“十二五”发展规划,向海洋进军的路线,造船和海洋工装行业将进一步快速发展,都将大力推动高空作业平台的发展。[2][3] 随着中国人口红利的减弱和通胀的加剧,加之人民币的不断升值,劳动力资源的成本会越来越高。在国家大力号召企业转型的背景下,带动、促进了高空作业平台市场的快速发展,同时还能够大幅改善施工作业的安全性,并促进施工工艺和租赁市场的进步与成熟,这些特质也就是吸引如此多企业入局的根本原因。[4] 随着高空作业的增多,对高空作业的舒适性和安全性的要求越来越高。本课题要求运用机械原理和液压传动技术设计一种臂架式高空作业平台,以满足行业发展的需要。 本课题研究主要是针对高空作业平台的整体结构及液压系统,进行一次设计演练,采用ANSYS等软件,对结构的静态和动态受力情况进行分析,利用其结果指导实际设计。对液压系统进行简单的计算,选择相关元器件,进而对动力进行匹配。 本设计采用设备:10米高空作业平台的基本结构参数如下: (1)、平台最大高度(米)10; (2)、平台额定载荷(kg)215; (3)、平台尺寸(米) 1.2×0.6; 2、研究目的和意义 高空作业平台作为施工工程中较新颖而安全的输运设备,其计算方法和分析手段同样是不容忽视的。但是传统的计算方法和分析手段由于受限于理论和手段的匮乏,相对简单,计算结果精度较差等一系列弊病的存在。同时减轻臂架重量,用于更大的外伸范围,以及臂架在展开后,平衡性的控制方面与国外产品差距还很大。针对于此,我们有必要对臂架部分及整体结构做受力分析,确定设计高空作业平台结构形式,即载重及受冲击载荷后,底盘抗倾覆力矩,及臂架在相应转角及伸缩的极限长度,以满足高处施工的安全要求,同时使制造和使用的成本最低,达到使用价值与经济效益的合理优化,实现性价比的最大优化。
中国高空作业设备租赁商10强 全球高空作业设备行业,中国是最具潜力和空间的市场,而在此其中,高空作业设备租赁企业正是推动市场成熟发展的重要力量之一。 为了发现其中的领军者阵营,在2017全球高空作业设备峰会上,工程机械观察联合《中国工程机械》杂志推出并发布了中国高空作业设备租赁商10强榜单。 他们是谁?他们究竟什么样? 中国高空作业设备租赁商10强榜单
上海宏信设备工程有限公司 上海宏信设备工程有限公司(以下简称“宏信设备”)成立于2011年,总部位于上海。其母公司为远东宏信有限公司。 宏信设备成立初期,主要聚焦于建筑施工领域,为建设领域各类企业提供设备租赁、设备委托管理、
维修服务及二手设备交易等全方位的综合服务解决方案。 2012年,宏信设备进入高空作业平台以及路面设备、发电机组等租赁市场,并与众多外资设备制造商建立长期战略合作伙伴关系,尤其在高空作业设备方面,积累了涵盖剪刀式、直臂式、曲臂式、蜘蛛式和桅柱式等多类产品,参与了包括轨道交通、高架道路、机场、厂房等多个领域的近1000个项目建设。 近几年,基于对设备资产全生命周期管理的丰富经验,宏信设备逐步构建起网络化的营销服务体系,依靠专业化的人才队伍全力推进全过程、精益化的运营管理模式,有效提高客户经营效率,帮助客户实现价值创造,不断推动中国建设领域设备运营管理水平的提升。 设备凭借强大的资本实力及丰富的设备资产管理经验,宏信设备如今已快速成长为国内拥有较大规模的设备租赁专业服务机构。并在除上海总部以外的其他地区——天津、南京、广州、福州、长沙、西安、郑州等50多个城市已经或正在设立分支机构和设备基地,合作伙伴遍布全国二十多个省份,形成了覆盖全国的营销能力和服务保障体系。 赫兹设备租赁集团 赫兹设备租赁集团(Herc Rentals,以下简称“赫兹设备租赁”)成立于1965年,总部位于美国,是一家致力于高空作业设备及物料搬运设备租赁、销售业务的专业化公司。 赫兹设备租赁是全球最大的设备租赁商之一,全球范围内拥有350家租赁门店,能够提供全系列的工程机械设备和工具的租赁与销售,主要服务于建筑,工业,石油,天然气,娱乐和政府等领域。 其在全球拥有员工4800多人、设备场地275处、设备资产36亿美元,年营业额约16亿美元左右。 2007年,赫兹设备租赁进入中国市场,主要服务项目包括租赁业务、个性化定制租赁项目、提供工程解决方案、设备交付及运回、新设备和二手设备出售、小型工具和用品出售、以租代买/租赁采购选择项目、全球/全国性跨区域大客户服务、安全培训项目、设备操作手支持等。 目前,其已经在中国上海、成都、广州、天津、南京、沈阳、青岛成立了7个区域枢纽运营中心,在
近年我国高空作业平台设备市场需求量猛增 我国十二五期间城镇化,使得城市中高楼大厦如雨后春笋般林立。这也使得高空作业人员及机械的需求量猛增。由于高空作业的局限性,使得高空作业平台的需求量得到快速发展。高空作业平台的产品较为丰富,作业高度由高至低很成熟,而且高空作业平台占地空间小作业高度高的特性。 一般高空作业平台设备分为桅杆式,剪刀车,曲臂式,直臂式,履带式、轮式和越野式等。作业高空在3-100米不等。自行式高空作业平台设备自行式高空作业平台设备的动力来源为发动机和外部电源,和车载式高空作业平台相比不能长途行走,只能在固定区域内使用。和牵引车式高空作业平台相比,自行式高空作业平台具有自动行走的功能,移动不需要外部动力源,方便,快捷。其体积小可以在室内和狭窄地区使用自行履带式高空作业平台体积小,通过性能强,爬坡及爬楼梯能力强,适应多种场地环境,起升高度一般在10-40m.适合在狭窄街道、室内大堂、需要爬楼梯的地方使用。此类设备的臂型结构分为:四连杆组合型:优点是回收之后体积小,便于存放、行动便捷、灵活。但是起升高度有限、工作范围小,适用于工况简单的空间使用。轮载式高空作业平台除了底盘上轮子与履带式不同外,其他结构(包括臂型结构、支腿类型等)都相同。轮载式平台转弯灵活,但是爬坡能力差,不能爬楼梯。此次展会轮载式平台的数量较少,大多都是履带式的。剪叉式高空作业平台利用液压油缸顶升剪叉臂,此种臂型结构可以使平台的承载能力增大,因此平台尺寸也可以相应增大,可以运输更多的物料、人等。但是剪叉结构收回时体积较大,而且稳定性较差,这就使得此类平台的起升高度不能太高,一般不超过十几米,而且这种结构只能垂直升降,使得其作业范围比其他类型的平台小。剪叉式高空作业平台的动力源是外部电源,本身没有发动机,这也限制了其使用范围。随着时间的推移我国高空作业平台及高空作业车生产厂家的技术不断完善及产品的不断更新。将会是高空作业车租赁行业得到突飞猛进的发展,高空作业车租赁行业今后将不亚于目前的起重机租赁市场。
编号:JS-20211908 甲 方:______________________________ 乙 方:______________________________ 日 期:_________年________月_______日 高空作业平台控制系统技术协议范本 模板 The parties to a contract shall fully fulfill their obligations pursuant to the terms of the contract.
[标签:titlecontent] 甲方:_____________________ 乙方:_____________________ 地址:_____________________ 就甲方委托乙方研发GTJZ高空作业平台电器控制系统一事经双方友好协商,达成以下技术要求: 一、外观要求 1.平台控制部分 控制部分包括:操纵手柄(由甲方提供)、急停按钮、行走和升降转换开关、喇叭按钮、爬坡功能选择按钮。 动作指示部分包括:工作模式、前进、后退、左转、右转、上升、下降、伸、缩、左旋转、右旋转、高速、低速、爬坡、(动作指示可以用一块液晶屏代替)指示灯。 所有控制动作和指示都要有图例或文字标注其功能! 2.地面控制部分 控制部分包括:急停按钮、三档钥匙开关(三个档位能拔出)、上升和下降自复位开关
动作指示部分:用一块液晶屏代替所有动作指示、开机自检、故障诊断、工作时间累计,电瓶电量显示等;此外充电指示灯用发光管指示。 所有控制动作要有图例或文字标注其功能! 3.所有控制箱及接插件至少达到IP54。 4.急停按钮下方要求有黄色警示标识,并有STOP字样。 二、技术参数要求 输入工作电压:DC24V 输入电源保险:10A 输出电压:DC24V 输出电流:≤2A(每路单独输出) 输出电磁阀保险:2A(每路单独输出) 驱动个数:8个电磁阀 三、功能和动作要求 1.平台控制部分 急停:拍下切断总电源(包括电机电源),旋起接通总电源;急停在接通电源时系统检测所有动作开关必须全部复位后才可进行操作,否则不能控制平台动作并报警。 前进:将行走和升降转换开关拨到行走功能处,按动使能钮向前推动操纵手柄,电机动作,前进电磁阀打开,随手柄向前推动的距离不同前进的快慢随之变化。 后退:将行走和升降转换开关拨到行走功能处,按动使能钮向后
2014年高空作业平台行业分析报告 2014年5月
目录 一、行业管理体系 (5) 1、行业主管部门 (5) (1)国家发改委 (5) (2)工信部 (5) (3)质检总局 (5) (4)环保部 (6) 2、行业自律组织 (6) 3、行业主要法律法规 (6) 4、产业政策 (7) 二、高空作业平台行业现状 (8) 1、美国市场容量 (9) (1)美国租赁业规模 (9) (2)美国租赁业的设备购买需求 (11) 2、欧洲市场容量 (11) (1)欧洲租赁业规模 (11) (2)欧洲租赁业的设备购买需求 (13) 3、中国市场容量 (14) (1)现有规模较小,但高速增长 (14) (2)未来发展潜力大,国际巨头看好中国市场 (14) 三、行业发展趋势 (15) 1、研发能力成为公司持续发展的核心动力 (15) 2、品牌建设成为影响公司发展的关键因素 (16) 3、产品性价比是重要竞争因素 (16) 四、行业竞争格局及市场化程度 (16) 1、国外制造商 (16) 2、国内制造商 (17) 3、竞争格局 (18)
4、生产企业的数量及各自的产能和产量 (20) (1)生产企业的数量 (20) (2)生产企业的产能和产量 (21) 五、行业进入壁垒 (21) 1、技术壁垒 (21) 2、人才壁垒 (22) 3、品牌壁垒 (22) 4、许可证和质量认证壁垒 (23) 六、市场供求状况及其变动原因 (24) 1、需求状况 (24) 2、供给状况 (24) 3、供求结构 (25) 七、行业利润水平的变动趋势及原因 (26) 八、影响行业发展的有利和不利因素 (27) 1、有利因素 (27) (1)政策前景良好 (27) (2)城市化进程带来发展契机 (28) (3)生产安全标准的提高促进市场规模扩大 (28) (4)租赁市场的崛起有利于扩大行业规模 (29) (5)全球制造中心转移推动行业成熟 (29) (6)出口市场潜力巨大 (30) 2、不利因素 (31) (1)行业基础薄弱,产业链不完整 (31) (2)行业应用有一个逐步认识过程 (31) 九、行业技术水平和技术特点 (31) 1、行业技术水平 (31) 2、技术发展趋势 (33) (1)产品的系列化 (33)
( 操作规程 ) 单位:_________________________ 姓名:_________________________ 日期:_________________________ 精品文档 / Word文档 / 文字可改 高空作业安全生产操作规程(标 准版) Safety operating procedures refer to documents describing all aspects of work steps and operating procedures that comply with production safety laws and regulations.
高空作业安全生产操作规程(标准版) 一、熟悉掌握本工种专业技术及规程。 二、年满18岁,经体格检合格后方可从事高空作业。凡患有高血压、心脏病、癫病病、精神病和其它不适于高空作业的人,禁止登高作业。 三、距地面三公尺以上,工作斜面坡度大于45度,工作地面没有平稳的立脚地方或有震动的地方,应视为高空作业。四、防护用品要穿戴整齐,裤脚要扎住,戴好安全帽,不准穿光滑的硬底鞋。要有足够强度的安全带,并应将绳子牢系在坚固的建筑结构件上或金属结构架上,不准系在活动物件上。 五、登高前,施工负责人应对全体人员进行现场安全教育。 六、检查所用的登高工具和安全用具(如安全帽、安全带、梯子、跳板、脚手架、防护板、安全网等),必须安全可靠,严禁冒险
作业。 七、高空作业区地面要划出禁区,用栏杆围起,并挂上“闲人免进”、“禁止通行”等警示牌。 八、靠近电源(低压)线路作业前,应先联系停电。确认停电后方可进行工作,并应设置绝缘挡壁。作业者最少离开电线(低压)2公尺以外。禁止在高压线下作业。 九、高空作业所用的工具、零件、材料等必须装入工具袋。上下时手中不得拿物件,并必须从指定的路线上下,不得在高空投掷材料或工具等物,不得将易滚易滑的工具、材料堆放在脚手架上,不准打闹。工作完毕应及时将工具、零星材料、零部件等一切易坠落物件清理干净,以防落下伤人,上下大型零件时,应采用可靠的起吊机具。 十、要处处注意危险标志和危险地方。夜间作业,必须设置足够的照明设施,否则禁止施工。 十一、严禁上下同时垂直作业。若特殊情况必须垂直作业,应经有关领导批准,并在上下两层间设专用的防护棚或者其他隔离设
国内外高空作业机械的及发展趋势 ■中国建筑科学研究院建筑机械化研究分院张华李守林 高空作业机械(包括车载式工作平台、移动式升降工作平台和固定式升降工作平台)是一种将作业人员、工具、材料等通过作业平台举升到空中指定位置进行各种安装、维修等作业的专用高空作业设备。由于该设备是用来载人高空作业,因此,对设备的安全要求很高。高空作业机械广泛用于建筑物外墙表面的装饰、清洗和维护、绝缘架线和维修、消防救援及大型物体(船舶、飞机)维护检查、路灯维修、机械化施工作业等。以下介绍国内外高空作业机械的现状及发展情况。 1 国外高空作业机械的现状及发展 国外高空作业机械生产企业主要集中在欧美和日本等发达国家,三个地区的高空作业机械产品又各有特点。 1.1 国外高空作业车 1.1.1 欧洲高空作业车行业 欧洲高空作业车生产厂家多,欧洲仅意大利已知的就有二十家左右高空作业车生产厂,德国、法国、英国、芬兰、丹麦等国也都有很多高空作业车生产厂,可以说欧洲是高空作业车最主要的产地。欧洲产品的结构型式齐全,高空作业机械按臂架结构可分为折叠臂、伸缩臂、混合臂等型式,欧洲产品各种结构都有采用,尤其是各种结构的混合臂产品,美国和日本很少见,而欧洲混合臂产品非常多。欧洲产品作业高度规格全,作业高度最低在10m左右,最大高度超过100m;北美地区的产品最大作业高度基本不超过70m,日本产品最大作业高度不超过60m。欧洲高空作业机械生产历史长,技术水平高,因此目前欧洲产品在世界上销售范围最为广泛,中东、东南亚、南美洲等地都是以欧洲产品为主。从以上几点可以说明欧洲是高空作业车最发达,技术水平最高的地区。但欧洲基本上不生产和使用高空绝缘车,目前仅芬兰博浪涛(Bronto)公司生产大高度高空绝缘车。欧洲主要高空作业车生产商如下: 1)Bronto:中文名波浪涛,芬兰公司,产品为高空作业车和消防救援车。消防车在中国具有很高知名度,我国进口的大高度高空作业车见表1。高空作业车以大高度为主,作业高度23~110m。目前是已知欧洲唯一生产高空绝缘车的厂家,高空绝缘车作业高度38~60m。芬兰波浪涛(Bronto)公司是全球最著名生产大高度高空作业车的企业,结构型式都是二级伸缩臂加多级伸缩折臂结构。 2)Palfinger:奥地利帕尔菲格起重技术有限公司,2008年全球工程机械50强第31位,主要业务为随车起重机,2007年在深圳建立组装厂─博威格起重设备公司。高空作业车业务包括WUMAG和BISON两个品牌。BISON高空作业车规格从14~61m,WUMAG从23~102m。目前产品分为:全伸缩臂系列、伸缩臂加飞臂系列、伸缩臂加飞臂、转台可回转系列、两级伸缩臂加飞臂系列。 3)Multitel Pagliero SpA:产品有汽车底盘式和蜘蛛式高空平台,车载式产品作业高度从13~72m,是意大利最大的高空作业车生产厂,2008年产量超过1000台。产品为三个系列,分别为:铝合金全伸缩工作臂系列、MX交叉布置混合臂系列、两级伸缩臂混合臂系列。 4)Oil&steel:意大利公司,属于PM集团,成立于1995年,产品有汽车底盘式和蜘蛛式高空平台。产品分为四个系列,分别为:全伸缩臂系列、联动折叠混合臂系列、两级伸缩臂混合臂系列、蜘蛛式自行式系列。作业高度10~70m。5)Ruthmann:中文名胡特曼,德国公司,生产高空作业车和蜘蛛式产品,作业高度范围11~102m。产品分为折叠臂系列、伸缩臂加飞臂系列、全伸缩臂系列、二级伸缩臂加飞臂系列、重型系列、蜘蛛式产品系列。
In the schedule of the activity, the time and the progress of the completion of the project content are described in detail to make the progress consistent with the plan.高空作业安全技术方案正 式版
高空作业安全技术方案正式版 下载提示:此解决方案资料适用于工作或活动的进度安排中,详细说明各阶段的时间和项目内容完成的进度,而完成上述需要实施方案的人员对整体有全方位的认识和评估能力,尽力让实施的时间进度与方案所计划的时间吻合。文档可以直接使用,也可根据实际需要修订后使用。 一、工程概况 (一)工程名称:康桥水郡1#公寓楼 (二)建设单位:宁夏地德人和房地产开发有限公司 (三)监理单位:宁夏回族自治区发展工程监理咨询有限公司 (四)建设地点:宝湖东路南侧,清和南街东侧 (五)结构类型:框架剪力墙结构 (六)建筑面积:17196.16㎡ 康桥水郡1#公寓楼工程为梁板式筏形基础,使用性质为一类建筑,总建筑面积
17196.16㎡,建筑层数:地下一层、地上十三层,地下面积为2211.60㎡,地上面积为14984.56㎡,建筑高度为65m,建筑用途:地下一层为设备用房、库房,层高为4.47m,地上一至三层为商业,一、三层层高为5.2 m,二层高为4.8 m,四至十三层为公寓,四、五层层高为3.6m,六至十三层层高为4.8 m,建筑的耐火等级为一级,抗震设防裂度为八度,建筑抗震设防类别为标准设防类(丙类),屋面防水等级为Ⅱ级,防水耐用年限为十五年,使用年限为五十年。 二、组织落实和物资保证 1、建立并不断充实现场安全管理体系,项目经理和现场施工负责人为高空作
车载式高空作业平台的结构设计 1.2 高空作业机械的国内外发展概况 1.2.1 高空作业机械的国外发展状况 高空作业车发展起步较早的欧美等发达国家和地区,从20世纪20年代就开始研制,发展历史久远,生产技术也很成熟,具有生产技术水平高、作业车的作业高度大、规格齐全、结构型式丰富、功能多样等优点。总体来看,技术和市场均已很成熟,产品能够进行高空作业、抢险、救援、消防等复杂工作,作业平台的最大载荷可达500kg,最大作业高度已经超过100m,这是我国目前无法设计达到的高度,同时具有各种安全保护措施,很好的保障了工人的安全。大型产品特点是科技含量高、研制与生产周期较长、投资大、市场容量有限,但市场竞争相对较少,产品的利润相对较高。如美国Genie公司、JLG公司和法国HAULOTTE公司在高空作业平台产品都形成了系列化,与此同时,产品更新换代的周期明显缩短。这大大提高了企业在国际市场中的竞争能力和企业的抗风险能力。 1.2.2 高空作业机械的国内发展状况 我国产品在质量和性能上与国外优秀产品虽然存在一定的差距,但是随着科技的不断发展,产品的功能和性能已经逐渐趋于同质化[3],因此必须通过对我国高空作业机械产品与国外先进企业产品进行分析和比较,找出发展问题的之所在,并提出相应的解决方案。我国高空作业平台的使用范围与国外相比来说还比较窄,使用较多的有路灯、交通、园林等部门,而在有发展前途的电力、电信及有线电视系统使用较少,市场远远没有挖掘和培育出来[3]。目前市场上的主要产品仍然是体积教大,对作业场地要求较高的拖车式或车载式高空作业车,而我国市场上的车载式高空作业车多为价格昂贵的国外进口产品或中外合资企业的产品,我国本土研发的设备极少,因此我们开发研制出拥有自主产权的高性能车载式高空作业平台具有很强的发展战略意义。 我们应提高工程设计效率和品质,节约设计成本,缩短设计周期[4-5]。而传统设计在设计一个工程结构的时候,首先要采用类比方法确定设计方案的初稿,然后对其结构进行分析,画出图纸,然后对重要部件进行强度的校核,并根据校核的结果重新修改设计方案,一般往往要进行多次分析校核和调整才能得到优秀的设计方案。这种设计方法的设计周期长、代价高、效率低,且所得到的方案多数不是最优方案[6-7]。只有加大行业技术创新力度,开发先进的高空作业机械,满足用户的差别化和个性化需求,为用户精细化服务,才能提高中国产品的市场竞争能力。 在我国实际工作过程中,人们对于安全性和劳动条件提出了更高的要求,尤其是在高空作业中,原始的脚手架、吊篮等安全系数较低的工作方式将会越来越少,而对于高空作业机械的需求必将越来越多[8]。另一方面,中国造船业逐渐成为世界第一,对于大型车载式高空作业平台的需求急剧增加。据不完全统计,仅中国造船行业在2009年约需六七百台
建筑施工高处作业安全技术规范JGJ80-91 中华人民共和国行业标准 建筑施工高处作业安全技术规范JGJ80—91 主编单位:上海市建筑施工技术研究所 批准部门:中华人民共和国建设部 施行日期:1992年8月1日 关于发布行业标准《建筑施工高处作业安全技术规范》的通知 建标〔1992〕5号 根据原城乡建设环境保护部(86)城科字第263号文的要求,由上海市建筑施工技术研究所主编的《建筑施工高处作业安全技术规范》,业经审查,现批准为行业标准,编号JGJ80—91,自1992年8月1日施行。 本标准由建设部建筑安全标准技术归口单位中国建筑第一工程局建筑科学研究所归口管理,由上海市建筑施工技术研究所负责解释,由建设部标准定额研究所组织出版。 中华人民共和国建设部 1992年1月8日 第一章总则 第1.0.1条为了在建筑施工高处作业中,贯彻安全生产的方针,做到防护要求明确,技术合理和经济适用,制订本规范。 第1.0.2条本规范适用于工业与民用房屋建筑及一般构筑物施工时,高处作业中临边、洞口、攀登、悬空、操作平台及交叉等项作业。 本规范亦适用于其他高处作业的各类洞、坑、沟、槽等工程的施工。 第1.0.3条本规范所称的高处作业,应符合国家标准《高处作业分级》GB3608—83规定的“凡在坠落高度基准面2m以上(含2m),有可能坠落的高处进行的作业”。 第1.0.4条进行高处作业时,除执行本规范外,尚应符合国家现行的有关高处作业及安全技术标准的规定。
第二章基本规定 第2.0.1条高处作业的安全技术措施及其所需料具,必须列入工程的施工组织设计。 第2.0.2条单位工程施工负责人应对工程的高处作业安全技术负责并建立相应的责任制。 施工前,应逐级进行安全技术教育及交底,落实所有安全技术措施和人身防护用品,未经落实时不得进行施工。 第2.0.3条高处作业中的安全标志、工具、仪表、电气设施和各种设备,必须在施工前加以检查,确认其完好,方能投入使用。 第2.0.4条攀登和悬空高处作业人员以及搭设高处作业安全设施的人员,必须经过专业技术培训及专业考试合格,持证上岗,并必须定期进行体格检查。 第2.0.5条施工中对高处作业的安全技术设施,发现有缺陷和隐患时,必须及时解决;危及人身安全时,必须停止作业。 第2.0.6条施工作业场所有坠落可能的物件,应一律先行撤除或加以固定。 高处作业中所用的物料,均应堆放平稳,不妨碍通行和装卸。工具应随手放入工具袋;作业中的走道、通道板和登高用具,应随时清扫干净;拆卸下的物件及余料和废料均应及时清理运走,不得任意乱置或向下丢弃。传递物件禁止抛掷。 第2.0.7条雨天和雪天进行高处作业时,必须采取可靠的防滑、防寒和防冻措施。凡水、冰、霜、雪均应及时清除。对进行高处作业的高耸建筑物,应事先设置避雷设施。遇有六级以上强风、浓雾等恶劣气候,不得进行露天攀登与悬空高处作业。暴风雪及台风暴雨后,应对高处作业安全设施逐一加以检查,发现有松动、变形、损坏或脱落等现象,应立即修理完善。 第2.0.8条因作业必需,临时拆除或变动安全防护设施时,必须经施工负责人同意,并采取相应的可靠措施,作业后应立即恢复。 第2.0.9条防护棚搭设与拆除时,应设警戒区,并应派专人监护。严禁上下同时拆除。 第2.0.10条高处作业安全设施的主要受力杆件,力学计算按一般结构力学公式,强度及挠度计算按现行有关规范进行,但钢受弯构件的强度计算不考虑塑性影响,构造上应符合现行的相应规范的要求。 第三章临边与洞口作业的安全防护 第一节临边作业 第3.1.1条对临边高处作业,必须设置防护措施,并符合下列规定: 一、基坑周边,尚未安装栏杆或栏板的阳台、料台与挑平台周边,雨蓬与挑檐边,无外脚手的屋面与
GTBZ1415高空作业平台技术规格书 一、主要部件介绍 1、下车总成 下车总成由底座,油箱和动力单元液压组件,转向机构组件,电池及其他和相关液压,电气元件组成。 行走方式为液压驱动,轮胎选用高负荷实心橡胶轮胎。满足车辆在不同环境下行驶要求。在坡道行驶时行走机构具有自制动功能,同时还设离合装置,在出现故障时方便拖行。 转向机构采用液压油缸驱动的连杆式转向机构,使机器有超紧凑的内转弯半径,使平台能够适应狭窄的环境 2、曲臂总成 使用折臂加套筒伸缩臂复合机构,使机构运动更加灵活,提高工作效率。 使用高强度材料,整个曲臂臂总成重量减轻,增加机器的稳定性能。 3、电气系统 电气系统采用美国PG Tronic公司提供的控制系统,采用CAN总线控制技术,底座和平台分别设置控制面板,平台设置显示器,转台和平台控制器之间采用CAN总线进行通讯,实现对机器动作的控制。 电气系统主要实现功能: 底盘的转向和行驶控制;转台的旋转动作,曲臂的上升下降以及延伸臂的伸缩动作。 实现的安全保护措施: 控制系统集成倾斜感应装置,在危险地面条件下限制机器的上升和行走; 载重报警系统,如果超过安全载荷机器自动报警 手柄集成联锁开关,防止误触动手柄时机器动作; 机器失去动力时,地面操作员可以使用机器配备的手摇泵让伸缩臂缩回; 当机器处于升起状态时,自动限制为低速行驶; 停车时双轮自动锁定,行驶时液压力作用自动解除制动。 4、液压系统 液压系统采用泵驱动,由蓄电池直接驱动为液压系统提供动力。液压总成采
用美国Hydraforce提供的部件,液压系统采用电液比例控制技术,可实现机器各项动作平稳。行走分为高低两档。 举升油缸配有缓冲机构,使下降末段动作平顺;油缸上的平衡阀,确保液压软管断裂时,能保证油缸不自动下降; 调平油缸可以确保作业槽在机器整个工作阶段都自动保持水平 机器油缸配置紧急下降阀,在意外故障和缺电情况下可以让平台以平稳的速度降下,确保人员安全。 二、GTBZ1415主要元件配置 型号关键部件产地品牌规格 序号控制器美国PG-control 1液压阀芯美国海德福斯压强上限21MPa 电磁阀线圈20V 2液压胶管澳大利 亚 RYCO/同等品 牌 高压液压胶管总成 3驱动电机中国裕成 4轮边减速器中国布雷维尼/银 菲特 5动力单元中国德力 6.3cc,48V,4.5KW 6开关德国施耐德 7油缸自制自制 8蓄电池美国Trojan/US/天 能 天能为免维护电池;其他 为加液电瓶 9充电器深圳龙升 10工作平台万全万全 11车架万全万全 12臂架万全万全 13锂电池中国定制选配14自动回转平台自制选配15特殊要求自制选配