《智能控制》大作业
学号:3112105145 姓名:翟李伟班级:自动化
2111
1、简答题:
1.1.根据目前智能控制系统的研究和发展,智能控制系统有哪些类型以及智能控制系统主要有哪些方面的工作可做进一步的探索和开展?
答:目前研究方向内容:1智控的基础理论和方法研究2智控的系统结构研究3基于知识系统及专家控制4基于模糊系统的智能控制5基于学习及适应性的智控6基于神经网络的智控7基于信息论和进化论的学习控制器研究8其他,如计算机智能集成制造系统,智能计算机系统,智能并行系统,智能容错控制,智能机器人等。
需要探索的方面:1开展指控理论与应用的研究2充分运用神经生理学心理学认知科学和人工智能等学科的基本卢纶,深入研究人类解决问题是表现出来的经验技巧策略,建立切实可行的智控体系结构3把现有的知识工程模糊系统信息论进化论神经网络理论和技术与传统的控制理论相结合,充分利用现有的控制理论,研究适合于当前计算机资源条件的智控策略和系统4研究人-机交互式的智控系统和学习系统以不断提高智控系统的智能水平5研究适合智控系统的并行处理机信号处理器智能传感器和智能开发工具软件,以解决智控系统在实际应用中存在的问题,使得智控得到更广泛的应用
1.2.比较智能控制与传统控制的特点?
答:智能控制的特点:1能为复杂系统(如非线性,快事变,多变量,强耦合,不确定性等)进行有效的全局控制,并具有较强的容错能力2定性决策和定量控制相结合的多模态组合控制3从系统的功能和整体优化的角度来分析和综合系统,以实现预定的目标,并应具有组织能力4同时具有以知识表示的非数学广义模型和以数学表示的数学模型的混合控制过程,系统在信息处理上既有数学运算,又有逻辑和知识推理。
传统控制中,稳定性,准确性和快速性。主要是以数字解析微结构的为基础的控制理论
1.3.简述模糊集合的基本定义以及与隶属函数之间的相互关系。
答:给定论域U上的一个模糊集A是指:对任何元素uÎU 都存在一个数(与之对应,表示元素u属于集合A的程度,这个数称为元素u 对 A的隶属度,这个集合称为模糊集合。为了描述元素u对U上的一个模糊集合的隶属关系,由于这种关系的不分明性,它将用从区间[0,1]中所取的数值代替0,1这两值来描述,记为(,数值(u)表示元素隶属于模糊集的程度,论域U上的函数μ即为模糊集的隶属函数,而(u)
即为u对的隶属度。
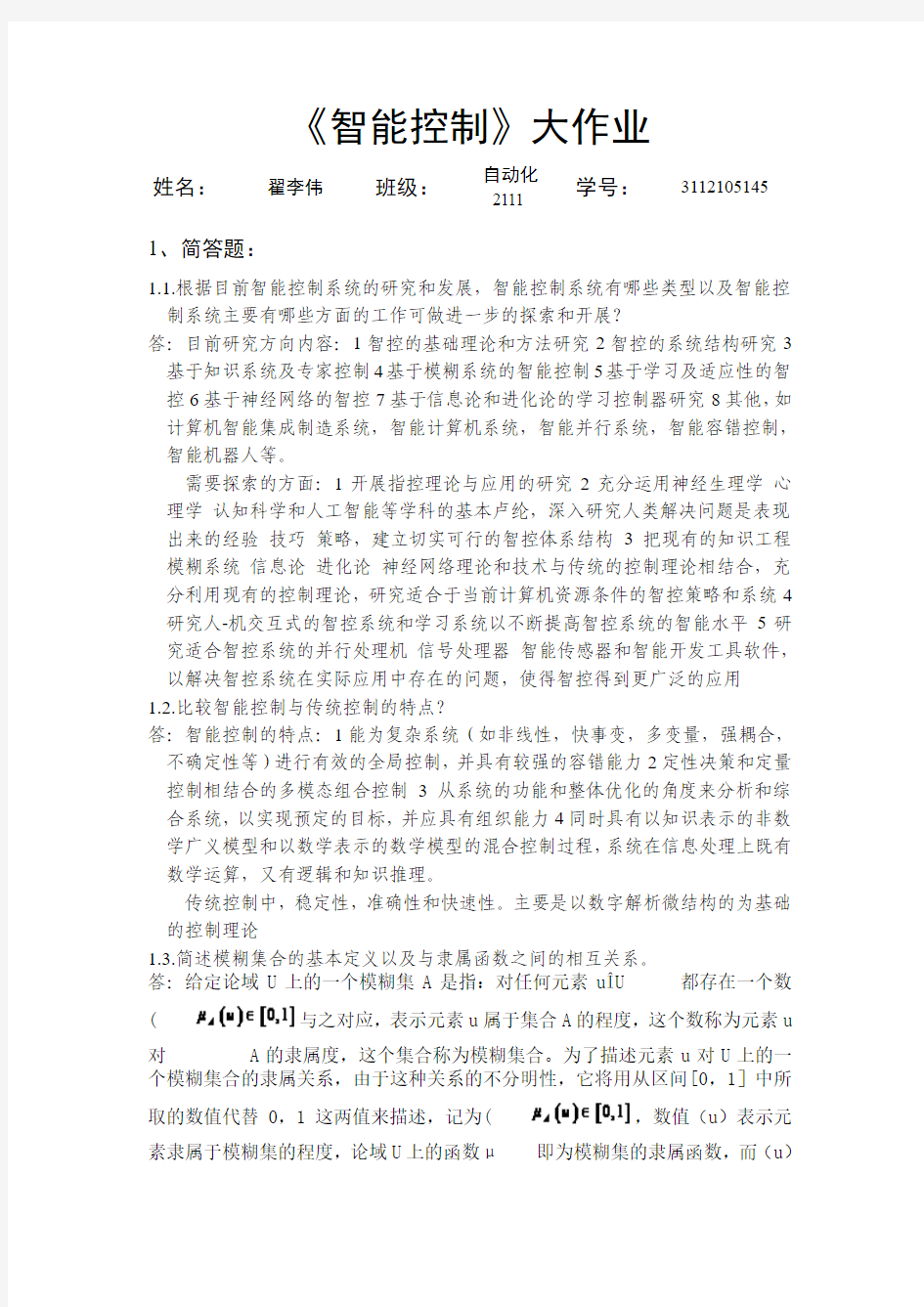
1.4.画出模糊控制系统的基本结构图,并简述模糊控制器各组成部分所表示的意思?
答:
模糊控制单元由规则库、模糊化接口、模糊推理和清晰化接口4个功能模块组成,模糊控制单元首先将输入信息,模糊化,然后经模糊推理规则,给出模糊输出,再将模糊指令化,控制操作变量。
1、规则库(rule base):由若干条控制规则组成,这些控制规则根据人类控制专家的经验总结得出,按照IF …is …AND …is …THEN …is…的形式表达。
2、模糊推理:以模糊集合论为基础描述工具,对以一般集合论为基础描述工具的数理逻辑进行扩展,从而建立了模糊推理理论。根据模糊输入和规则库中蕴涵的输入输出关系,通过第二章描述的模糊推理方法得到模糊控制器的输出模糊值。模糊推理是模糊控制器的核心,它具有模拟人的基于模糊概念的推理能力。该推理过程是基于模糊逻辑中的蕴含关系及推理规则来进行的。
3、模糊化接口(Fuzzification):这部分的作用是将输入的精确量转化成模糊化量。其中输入量包括外界的参考输入,系统的输出或状态等。
清晰化(解模糊接口)
4、清晰化接口:清晰化的作用是将模糊推理得到的控制量(模糊量)变换为实际用于控制的清晰量。它包含以下两部分内容:
(1)将模糊控制量经清晰化变换变成表示在论域范围的清晰量。
(2)将表示在论域范围的清晰量经尺度变换变成实际的控制量。
1.5.模糊控制规则的生成方法通常有哪几种,且模糊控制规则的总结要注意哪些
问题?
答:生成方法:1根据专家经验或过程控制知识生成控制规则2根据过程的模糊模型生成3根据学习算法获取控制规则
注意问题:1规则数量合理2规则要具有一致性3完备性要好
1.6.画出三层BP 神经网络的基本结构图,并试写出各层之间的输入输出函数关系,并简述其主要思想?
答:
各层之间输入输出函数关系:
第1层:输入层将输入引入网络
第二层(隐层):
第三层:(输出层):
1.7.神经网络系统具有哪些基本特性,以及神经网络在控制系统中具有哪些作用?
答:神经网络的基本特性:1非线性映射逼近能力2自适应性和自组织性3并行处理性4分布存储和容错性5便于集成实现和计算模拟
在控制中的作用:1基于精确模型的各种控制结构中充当对象的模型2在反馈控制系统中充当控制器的作用3在传统控制系统中起优化计算作用4在与其他智能控制方法和优化算法相融合中,为其提供对象模型,优化参数,推理模型及故障诊断等
1.8.基于信息论的分级递阶智能控制系统主要构成有哪些,分别起什么作用? 答:递阶智能控制系统是由三个基本控制级:组织级,协调级,执行级构成的 i
i i x In Out ==)1()1(n i ,...,2,1=l j In Out Out In j j j i ij n i j ,...,2,1)(,)2()2()1()1(1)2(=Φ=-∑==θωm k Out In Out y j jk l j k k k ,...,2,1)2()2(1)3()3(=∑====ω
1组织级组织级代表控制系统的主导思想,并由人工智能其控制作用。根据贮存在长期存储疾患单元内的本源数据集合,组织器能够组织绝对动作,一般人物和规则的序列
2协调级协调级是组织级和执行级间的接口,承上启下,并由人工智能和运筹共同作用。协调级借助于产生一个适当的子任务序列来执行原指令,处理实时信息。它是由不同的协调器组成,每个协调器由计算机来实现。
3执行级执行级是递阶智能控制的最底层,要求具有较高的精度但较低的智能;它按控制论进行控制,对相关过程执行适当的控制作用。
1.9.简述专家系统与专家控制的区别。
答:与专家系统主要区别,专家控制系统在控制领域中特别强调实时性,专家控制系统在实时控制时必须:
(1)将操作人员从系统的环路中撤走
(2)建立自动的实时数据采集子系统,需将传感器的输出信息作预处理(3)根据可利用的环境信息,综合适当的控制算法。被控对象的模型可以是预知的,也可以在线辨别。推理机制要求做到离线和在线推理,并具有递阶结构的推理过程
1.10.简述专家系统的基本构成。
答:专家系统由知识库,数据库,推理机,解释器及知识获取器5个部分组成
2、计算题:
2.1. 已知三个模糊矩阵R、S和Q分别如下所示,
0.60.40.70.20.50.10.90.30.4R ????=??????,0.20.70.30.80.60.51.00.20.9S ????=??????,0.60.50.20.80.40.80.4 1.00.70.10.90.3Q ????=??????
试求R S ?,R S ?,()R S Q ?,以及()R S Q ?。
解:由题知
因为 0.40.6
0.30.80.5
0.90.10.70.6R ????=??????
所以 0.40.70.30.80.60.90.10.70.9R S ????=?????? 0.20.40.30.20.50.10.90.20.4R S ????=??????
又 0.60.70.70.80.60.51.00.30.9R S ????=?????? 0.80.30.70.20.40.500.80.1S ????=??????
0.60.30.70.20.40.100.30.1R S ????=??????
因此 ()0.70.70.70.70.60.60.50.80.70.50.90.8R S ??????????。Q = 又0.40.50.80.20.60.20.600.30.90.10.7Q ????=??????
所以 ()0.40.70.60.70.40.20.40.20.30.20.30.1R S ??????????
。Q =
2.2.设有论域{}12345X Y ==,A 是论域X 上的模糊集,B 是论域Y 上的模糊
集,且[][]10.60.30.10A ==黑,[][]00.10.40.71B ==白,求“如果x 黑则y 白,
否则C 不很白”的模糊关系R 。(其中:…很?为强化语气算子2λ=)】
解: ],
004.011[=C
2.3. 已知输入模糊量分别为 1.00.412A a a =
+,0.10.4 1.0123B b b b =++,而输出模糊量为0.20.6 1.0123
C c c c =++,求模糊语句“若A 且B ,则C ”所蕴含的关系R 。 解:解:由题意可得:若A 且B ,则C
R=([1.0 0.4]T [0.1 0.4 1.0])T [0.2 0.6 1.0]
[]0.15.03.04.04.01.00.17.01.0T
??????= ?????????
???????????=4.04.03
.04.04.03.01.01.01
.00.15.03.04.05.03.01.01.01.0 2.4. 设有论域{}12345X Y ==,X ,Y 上的模糊子集“大”、“小”、“较小”分别表示为:
00.10.40.71[]12345
=++++大 10.70.40.10[]12345
=++++小 10.60.40.20[]12345
=++++较小 设“若x 小则y 大”,当x 较小时,试确定y 的大小。
解:由题0000000000=0.40.40.4000.70.70.40
01.00.70.400R ????????=?????????????????
大小 .004.011004.0111.01.04.09.09.05.05.04.05.05.018.03.000)()(???????
?????????==?C A B A R T T
2.5.设有论域{}123U a a a =,{}123V b b b =,{}123W c c c =,已知: 10.40.1
123A a a a =++
0.80.50.2
123B b b b =++
0.50.6
0.7
123C c c c =++
设“若A 则B ,否则C ”,求输入为*0.210.4
123A a a a =++时的输出D 。
解:令
设“若A 则B ,否则C ”的模糊关系为R ,则:
由模糊关系得:
2.6. 求模糊集合
12345
0.5
0.610.70.3
A u u u u u =++++
的α截集()0.1,0.5,1ααα===。
解:
2.7. 设有一模糊控制器的输出结果为模糊集合C ,其隶属度为
0.50.70.30.50.710.70.232234567C ??
=??--?? ],1.04.01[=A ],2.05.08.0[=B ],7.06.05.0[=C ].
4.01.02.0[*=A ????
???
???=????????????????????==?7.06.05
.06.06.05
.02.05.008
7.06.05.06.06.05.00001.01.01.02.04.04.02.05.08.0)()( C A B A R T T ]
4.04.04.0[7.06.0
5.06
.06.05.02.05.008]4.01.02.0[*=??
??
?
?????== R A D }
{543211.0u u u u u A =}
{43215,0u u u u A =}
{30.1u A =
试用重心法计算模糊判决的结果(四舍五入)。
解:由题意,由重心法采样点作为基,有:
3、设计题:
针对不同对象(如倒立摆、电机、机器人等)(每班各同学对象不得相同)详细设计相应的控制器。篇幅控制在2000字-3000字(不包括图表、公式等)。
自动化2111班设计模糊控制器,自动化2112班设计神经网络控制器。
3.1 考核目的:
通过考核要求学生掌握模糊控制、神经网络控制的基本概念、基本原理和基本方法,并能够运用相应的智能控制方法,设计系统的控制器实现对系统的控制,初步具有运用智能控制相关方法分析解决实际问题的能力。
3.2 考核时间:
课程结束后两周内上交电子版本和纸制打印文件,如果发现同学相互间重复率大于50%,则考核一律按不及格处理。
3.3 排版要求:
1.文件名称:学号+姓名(各班长收齐并按学号排序)
2.二级标题:小四字体-黑体-居中-单倍行距-段前段后各0.5行
3.正文字体:小四 仿宋/Time New Roman
4.正文行间距:固定行距 18磅
其中:所有公式(使用公式编辑器编辑)、图、表均单倍行
距 7.22.07.017.05.03.07.05.07*2.06*7.05*14*7.03*5.02*3.0)2(*7.0)3(*5.0*
?=+++++++++++++-+-=U
3-1 模糊逻辑控制器由哪几部分组成?各完成什么功能? 答:模糊控制系统的主要部件是模糊化过程、知识库(数据库和规则库)、推理决策和精确化计算。 1、模糊化过程 模糊化过程主要完成:测量输入变量的值,并将数字表示形式的输入量转化为通常用语言值表示的某一限定码的序数。 2、知识库 知识库包括数据库和规则库。 1)、数据库 数据库提供必要的定义,包含了语言控制规则论域的离散化、量化和正规化以及输入空间的分区、隶属度函数的定义等。 2)、规则库 规则库根据控制目的和控制策略给出了一套由语言变量描述的并由专家或自学习产生的控制规则的集合。它包括:过程状态输入变量和控制输出变量的选择,模糊控制系统的建立。 3、推理决策逻辑 推理决策逻辑是利用知识库的信息模拟人类的推理决策过程,给出适合的控制量。(它是模糊控制的核心)。 4、精确化过程 在推理得到的模糊集合中取一个能最佳代表这个模糊推理结果可能性的精确值的过程称为精确化过程。
{模糊控制器采用数字计算机。它具有三个重要功能: 1)把系统的偏差从数字量转化为模糊量(模糊化过程、数据库两块); 2)对模糊量由给定的规则进行模糊推理(规则库、推理决策完成); 3)把推理结果的模糊输出量转化为实际系统能够接受的精确数字量或模拟量(精确化接口)。} 3-2 模糊逻辑控制器常规设计的步骤怎样?应该注意哪些问题? 答:常规设计方法 设计步骤如下: 1、确定模糊控制器的输入、输出变量 2、确定各输入、输出变量的变化范围、量化等级和量化因子 3、在各输入和输出语言变量的量化域内定义模糊子集。 4、模糊控制规则的确定 5、求模糊控制表 3-3 已知由极大极小推理法得到输出模糊集为:0.30.810.50.112345 C = ++++-----.试用重心法计算出此推理结果的精确值z 。 重心法 重心法 是取模糊隶属度函数的曲线与横坐标围城面积的重心为模糊推理最终输出值。 连续:0()()v V v V v v dv v v dv μμ=??
语言变量X ,Y ,Z 的隶属度函数. 设计带有纯延迟的一阶惯性环节(假设T=6,=0.02): G(s)=s e s 6102.0+ 的模糊控制器,观察仿真结果。 编程如下: %被控系统建模 num=1; den=[6,1]; [a1,b,c,d]=tf2ss(num,den);%传递函数转换到状态空间 x=[0]; %系统参数 T=0.01;h=T;td=0.02;N=1000; nd=td/T;%系统纯延迟 R=ones(1,N);%参考输入 %定义输入和输出变量及隶属度函数
a=newfis('Simple'); a=addvar(a,'input','e',[-4 4]); a=addmf(a,'input',1,'NB','trimf',[-4,-4,-2]); a=addmf(a,'input',1,'NS','trimf',[-4,-2,0]); a=addmf(a,'input',1,'ZO','trimf',[-2,0,2]); a=addmf(a,'input',1,'PS','trimf',[0,2,4]); a=addmf(a,'input',1,'PB','trimf',[2,4,4]); a=addvar(a,'input','de',[-4 4]); a=addmf(a,'input',2,'NB','trimf',[-4,-4,-2]); a=addmf(a,'input',2,'NS','trimf',[-4,-2,0]); a=addmf(a,'input',2,'ZO','trimf',[-2,0,2]); a=addmf(a,'input',2,'PS','trimf',[0,2,4]); a=addmf(a,'input',2,'PB','trimf',[2,4,4]); a=addvar(a,'output','u',[-4 4]); a=addmf(a,'output',1,'NB','trimf',[-4,-4,-2]); a=addmf(a,'output',1,'NS','trimf',[-4,-2,0]); a=addmf(a,'output',1,'ZO','trimf',[-2,0,2]); a=addmf(a,'output',1,'PS','trimf',[0,2,4]); a=addmf(a,'output',1,'PB','trimf',[2,4,4]); %模糊规则矩阵 rr=[5 5 4 4 3 5 4 4 3 3 4 4 3 3 2 4 3 3 2 2 3 3 2 2 1]; r1=zeros(prod(size(rr)),3);k=1; for i=1:size(rr,1) for j=1:size(rr,2) r1(k,:)=[i,j,rr(i,j)]; k=k+1; end end [r,s]=size(r1); r2=ones(r,2); rulelist=[r1,r2]; a=addrule(a,rulelist); %采用模糊控制器的二阶系统仿真 e=0;de=0; ke=30;kd=5;ku=1; for k=1:N %输入变量变换至论域 e1=ke*e; de1=kd*de; if e1>=4
智能控制导论大作业 学号:021151** 姓名:** 任课教师:吴**
目录 一、说明………………………………………………………………… I.文章出处………………………………………………………… 二、论文翻译…………………………………………………………… I.摘要……………………………………………………………… II.引言……………………………………………………………… III.背景信息…………………………………………………………… IV.神经网络整体结构……………………………………………… V.神经网络的整体的标定中的应用……………………………… VI.总结……………………………………………………………… 三、课程与论文关系…………………………………………………… 四、智能导论课程总结…………………………………………………
一、说明 本次大作业针对“Improved Calibration of Near-Infrared Spectra by Using Ensembles of Neural Network Models”文章进行翻译。这篇文章摘自IEEE SENSORS JOURNAL, VOL. 10, NO. 3, MARCH 2010。作者是Abhisek Ukil, Member, IEEE, Jakob Bernasconi, Hubert Braendle, Henry Buijs, and Sacha Bonenfant。 二、论文翻译 利用神经网络模型整体对近红外光谱校正改进 摘要: 红外(IR)或近红外(NIR)光谱技术是用来识别一种混合物或来分析材料的组成的方法。NIR光谱的校准是指利用光谱的多变量描述来预测各组分的浓度。建立一个校正模型,最先进的软件主要使用线性回归技术。对于非线性校正问题,基于神经网络的模型已经被证明是一个有意义的选择。在本文中,我们提出了一个新的基于神经网络的扩展传统的方法,利用神经网络模型整体。个别神经网络是从重采样与引导或交叉验证技术训练信息数据中获得。在一个现实的校准实施例中得到的结果表明,该集合为基础的方法,会产生一个比传统的回归方法更显著更精确和鲁棒性强的校准模型。 关键词: 自举,校准,计量学,交叉验证,傅立叶变换,近红外(NIR),近红外光谱仪,神经网络,光谱。 I.引言: 红外(IR)或近红外(NIR)光谱技术是用来识别一种混合物或来分析材料的组成的方法。这是通过学习物质与红外光间相互作用而完成的。红外/近红外光谱是指红外光的吸收为波长的函数。在红外光谱中,考虑的频率范围通常是14000和10厘米分之一。注意,所施加的频率刻度是波数(以厘米倒数为单位),而不是波长(以微米为单位)。该材料在不同频率下的吸收测定中的百分比。“化学计量学”是数学和统计方法的应用,以化学数据的分析,例如,多元校正,信号处理/调节,模式识别,实验设计等。 在化学计量学,校准是通过使用光谱多变量描述符来预测不同成分的浓度来实现。在本文中,我们提出并分析采用基于神经网络的校正模型整体。整体的个别型通过重新取样与引导或交叉验证技术的原始训练数据的实现。该集成模型被示为导致显著改善预测精度和鲁棒性,当与常规的校准方法相比。 在本文的其余部分安排如下。在第二节中,提供有关工作的背景信息。这包括使用的光谱仪,数据采样,目前最先进的校准方法和基于神经网络的校准模型的信息。第三节介绍了
专业分流出来了,鉴于这么多学弟学妹们进入了计算机系,作为一个即将毕业的学长,决定将自己的一些个经验写下来,希望对大家有所帮助。 接下来我会将自己修过的专业课课程以及老师,心得写下来。参照的教学计划是我们当初的教学计划,或许会和现在的有一些不同,不过大致上应该不会有太大差别。 高级语言程序设计(1-2),这门课是计算机学院的基础必修课吧,也就是俗称的C++,很重要很重要的课程,学好了这门课,基本上可以说计算机入门了,这门课的好坏,会直接影响到你对后边关于编程语言课程的理解与学习。我当时选的老师是朱颖老师,相当好的一个老师,讲课很细,很细心,对于那些个觉得自己对编程一知半解的同学,我觉得朱老师会是一个能够很好的带领你走进计算机编程世界的老师。 电工,电子,这两门课可以说是承接大物的吧,多是电磁学的。老师么,由于自己当初选的老师感觉一般般,就不多介绍了,大家自己摸索吧。 离散数学(1-2),这门课程是介绍一些逻辑的课程,集合,图论,数理逻辑,等等。对以后数据结构课程会有很大的影响,应该说是先修课程吧。我们当初开这门课的老师一共有三位。郁松年,夏骄雄,武频。我当时选的是夏老师,很好的一个老师,个人觉得听他的课程能够很容易理解,不过不清楚现在是否还是这三个老师教了。另外,郁松年老师绝对是大牛级别的老师,如果他还有开课的话,果断选,一定不会后悔的!武频老师似乎是郁松年老师的弟子(如果我没记错的话)比较年轻的一位女老师,因为没上过她的课,所以不大了解。 数字逻辑。看课程名字就知道是关于逻辑的课了。里头会设计到一些逻辑电路的知识,也算是比较基础的一门课吧。推荐张石林老师。相当不错的人。 计算机组成原理(1-2)。友情提醒,这门课没有平时分,所以一定要认真学哦。课程不难的。也是基础课之一,介绍的是一些计算机硬件的相关知识,推荐两个老师,赵根昌老师和诸尔明老师。 汇编语言程序设计。友情提醒,不要选沈云付,再次提醒,不要选沈云付,再三提醒,不要选沈云付。这么说吧,这们课讲解的是一些底层的编程语言——汇编语言。但是以后,除非你再要读研,要搞硬件,不然的话这门课基本上是用不上的。但是不要掉以轻心,这门课挂人还是满厉害的。沈云付老师,应当说,适合那些个觉得自己这门课要拿4.0的学生,然后每堂课坐在第一排听课,如果你让老师认识你了,那么恭喜你,基本上4.0了。如果你是抱着混么混过去的心态的话,那么你基本上不会过了。因为,我个人觉得,70%+的人会是听得云里雾里的。汇编么,我还是推荐江苏苏老师和杨洪斌老师吧。 数据结构(1-2)。有句话是这么说的,不知道大家看没看过:程序=算法+数据结构。由此可见,数据结构这门课对计算机而言是多么重要。在此推荐曹旻老师,相当好的一位女老师,不论是本身的知识水平,亦或是教学方式,等等,都是相当好的。另外,沈俊老师也还好吧,是一位面冷心热的老师,比较凶,但是还不错。另外,友情提醒,不要选许庆国。 操作系统(1-2)。虽然是基础必修课,但是,怎么说呢,这门课压根就是一酱油课。如果你觉得以后要读研究生的话,还是好好学学吧,对以后有帮助。如果不读的话,也还是好好学学吧,为了不挂科(嘻嘻)。推荐赵正德老师,这是后边一位同学提起我才想起来的,没上过课,不过盛名之下应当无虚的。另外,张建老师,虽然讲课有点打瞌睡,不过关键是不会挂人。 编译原理。当你学这门课程的时候,你会发现你已经到了云里雾里了。没关系,当你考试的时候,你会发现这门课是有多门的简单。一句话,听不懂课不要紧,会做题就ok了。我当时选的是许东。
智能控制系统实验报告 ARMA 模型 ARMA(p,q)是一个线性时间序列预测模型,适用于平稳的时间序列,即对于任何时刻t ,都有()t E Z μ=,E(a t )=0.协方差矩阵(')t t E a a ∑=,对于任意0l ≠有(')0t t l E a a +=。 AR 模型 11t t p t p t Z Z Z νφφε--=++++ (0.1) 当误差项t ε自相关时,可以被有限阶滑动平均表示 11t t t q t q a a a ε--=+Θ++Θ (0.2) 这里t a 是零均白噪声,协方差矩阵a ∑非奇异。结合AR 过程和MA 误差项,得到ARMA 过程: 111111t t p t p t t p t p t t q t q Z Z Z Z Z a a a νφφενφφ------=++++=+++++Θ++Θ (0.3) 对于一个很大的阶数n ,AR(n)接近ARMA(p,q) 1 ()()n t t i t i i Z n Z a n -==+∑∏ (0.4) 从(0.4)得到残差的估计值 1??()()n t t i t i i a n Z n Z -==-∏∑ (0.5) 其中?()i n ∏利用多变量最小二乘法求解,然后使用估计值?()t a n 建立多变量回归模型 1111??t t p t p t t q t q Z Z Z a a a φφ----=++++Θ++Θ (0.6) 1111[,,:,.]()?()?()t t p t p q t t t q Z Z Z a n a n a n φφ----?? ?????? =ΘΘ+??????????? ? (0.7) (1:)0[,]T Z Y A =ΦΘ+ (0.8) 01[,,]T A a a = (0.9) 000'???()a A A n T ∑= (0.10) 最小二乘法求解公式,以AR(p)为例。
(单选题)1: 一般认为,人工神经网络适用于() A: 线性系统 B: 多变量系统 C: 多输入多输出系统 D: 非线性系统 正确答案: (单选题)2: 递阶控制系统的结构是根据下列原理设计的() A: 精度随智能降低而提高 B: 精度随智能提高而提高 C: 精度随智能降低而降低 D: 精度与智能无关 正确答案: (单选题)3: 智能控制成为国际上独立新学科的时间为20世纪() A: 60年代 B: 70年代 C: 80年代 D: 90年代 正确答案: (单选题)4: 基于模式识别的控制系统属于() A: 学习控制系统 B: 专家控制系统 C: 进化控制系统 D: 模糊控制系统 正确答案: (单选题)5: 能够在系统运行过程中估计未知信息,并据之进行优化与控制,以便逐步改进系统性能的控制叫做() A: 最优控制 B: 反馈控制 C: 随机控制 D: 学习控制 正确答案: (单选题)6: 最早提出人工神经网络思想的学者是() A: McCulloch-Pitts B: Hebb C: Widrow-Hoff D: Rosenblatt 正确答案: (单选题)7: 解决自动控制面临问题的一条有效途径就是把人工智能等技术用于自动控制系统,其核心是() A: 控制算法 B: 控制结构 C: 控制器智能化 D: 控制系统仿真 正确答案: (单选题)8: 智能控制的“四元交集结构”的四元,指的是() A: 计算机科学、自动控制、人工智能、神经网络 B: 人工智能、自动控制、信息论、系统论 C: 人工智能、自动控制、信息论、机器学习 D: 自动控制、人工智能、信息论、运筹学 正确答案: (单选题)9: 模糊控制是以模糊集合为基础的,提出模糊集合的科学家是()
5-1 什么是专家系统?它具有哪些特点和优点? 专家系统(Expert System) 是一个智能计算机程序系统,其内部含有大量的某个领域专家水平的知识与经验,能够利用人类专家的知识和解决问题的方法来处理该领域问题。也就是说,专家系统是一个具有大量的专门知识与经验的程序系统,它应用人工智能技术和计算机技术,根据某领域一个或多个专家提供的知识和经验,进行推理和判断,模拟人类专家的决策过程,以便解决那些需要人类专家处理的复杂问题。简而言之,专家系统是一种模拟人类专家解决领域问题的计算机程序系统。 专家系统的特点如下: (1)启发性。不仅能使用逻辑知识,也能使用启发性知识,它运用规范的专门知识和直觉的评判知识进行判断、推理和联想,实现问题求解; (2)透明性。它使用户在对专家系统结构不了解的情况下,可以进行相互交往,并了解知识的内容和推理思路,系统还能回答用户的一些有关系统自身行为的问题; (3)灵活性。专家系统的知识与推理机构的分离,使系统不断接纳新的知识,从而确保系统内知识不断增长以满足商业和研究的需要; (4)实用性。可长期保存人类专家的知识与经验,且工作效率高、可靠性好、能汇集众多专家的特长,达到高于任何单个专家的水平,是保存、传播、使用及提高专家知识与经验的有效工具; (5)符号操作。与常规程序进行数据处理和数字计算不同,专家系统强调符号处理和符号操作。使用符号表示知识,用符号集合表示问题的概念,一个符号是一串程序设计,并可用于表示现实世界中的概念; (6)不确定性推理。领域专家求解问题的方法大多数是经验性的,经验知识一般用于表示不精确性且存在一定概率的问题。此外,其提供的有关信息往往是不确定的。而专家系统能够综合应用模糊和不确定的信息与知识进行推理; 专家系统的优点如下: (1)专家系统能够高效率、准确、周到、迅速和不知疲倦地进行工作; (2)专家系统解决实际问题时不受周围环境的影响,也不可能遗漏忘记; (3)军事专家系统的水平是一个国家国防现代化的重要标志之一;
智能控制理论及应用 (实验指导书) 实验一模糊控制的理论基础实验 实验目的: 学习隶属函数编程;模糊矩阵合成运算编程;模糊推理运算编程。 1隶属函数编程 学习P39 例2-12 (以下为例程) 完成思考题P80 2-2 写出W及V两个模糊集的隶属函数,并绘出“非常老,很老,比较老,有点老”的四个隶属度函数仿真后的曲线。 %Membership function for old People clear all; close all; for k=1:1:1001 x(k)=(k-1)*0.10; if x(k)>=0&x(k)<50 y(k)=0; else y(k)=1/(1+(1/((x(k)-50)/5)^2)); end end plot(x,y,'k'); xlabel('X Years');ylabel('Degree of membership'); 2 模糊矩阵合成仿真程序 学习P31例2-10,仿真程序如下。 完成思考题P81 2-5,并对比手算结果。 clear all; close all; A=[0.2,0.8; 0.6,0.1]; B=[0.5,0.7; 0.1,0]; %Compound of A and B for i=1:2 for j=1:2 AB(i,j)=max(min(A(i,:),B(:,j)')) end end
3 模糊推理仿真程序 学习P47 例2-16,仿真程序如下。 完成思考题2-9,并对比手算结果。 clear all close all a=[1;0.5] b=[0.1;0.5;1] c=[0.2;1] for i=1:2 for j=1:3 ab(i,j)=min(a(i),b(j));%求出D end end t1=[]; for i=1:2 t1=[t1;ab(i,:)']; end %准备好DT; for i=1:6 for j=1:2 r(i,j)=min(t1(i),c(j)); end end %求出R a1=[0.8;0.1] b1=[0.5;0.2;0] for i=1:2 for j=1:3 ab1(i,j)=min(a1(i),b1(j)); %求出D1 end end t2=[]; for i=1:2 t2=[t2;ab1(i,:)']; end for i=1:6 for j=1:2 d(i,j)=min(t2(i),r(i,j)); c1(j)=max(d(:,j)); end end
1、已知某一炉温控制系统,要求温度保持在600 度恒定。 针对该控制系统有以下控制经验: (1)若炉温低于600 度,则升压;低的越多升压越高。 (2)若炉温高于600 度,则降压;高的越多降压越低。 (3)若炉温等于600 度,则保持电压不变。设模糊控制器为一维控制器,输入语言变量为误差,输出为控制电压。输入、输出变量的量化等级为7 级,取5 个模糊集。试设计隶属度函数误差变化划分表、控制电压变化划分表和模糊控制规则表。 解:1)确定变量 定义理想温度为600 C,实际温度为T,则温度误差为 E=600-T。 将温度误差E 作为输入变量 2)输入量和输出量的模糊化 将偏差E分为5个模糊集:NB、NS、ZO、PS、PB,分别为负小、负大、零、正小、正大。将偏差E 的变化分为7 个等级:-3 -2 -1 0 1 2 3,从而得到温度模糊表如表1 所示。
表1温度变化E划分表 控制电压也分为个模糊集:、、、、,分 别为负小、负大、零、正小、正大。将电压u的变化分为7 个等级:-3 -2 -1 0 1 2 3,从而得到电压变化模糊表如表2所示。 表2电压变化u划分表
表3 模糊控制规则表 E PB PS ZO NS NB u PB PS ZO NS NB Edit or: Un+ it 1 e J. 歼cw OptigT
叮叮小文库
叮叮小文库 2、利用MATLAB,为下列两个系统设计模糊控制器使其稳态 误差为 零,超调量不大于 1%,输出上升时间w 0.3s 。假定被 控对象的传递函数分别为: Gg e 0亦 (s 1)2 G2(S ) 4.228 (s 0.5)( s 2 1.64 s 8.456) 解: 在matlab 窗口命令中键入 fuzzy ,得到如下键面: 设e 的论域范围为[-1 1] , de 的论域范围为[-0.1 0.1] , u 的论 域范围为[ 0 2]。 将e 分为8个模糊集,分别为 NB ,NM, NS, NZ, PZ, PS, PM, PB; de 分为7个模糊集,分别为NB ,NM ,NS, Z ,PS ,PM ,PB; u 分为7个模糊集,分别为 NB ,NM ,NS, Z ,PS ,PM ,PB;
智能控制导论大作业 学院:电子工程学院 专业:智能科学与技术
推理方法综述 一、推理的定义: 推理是人类求解问题的主要思维方法。所谓推理就是按照某种策略从已有事实和知识推出结论的过程。通过一个或几个被认为是正确的陈述、声明或判断达到另一真理的行动,而这真理被相信是从前面的陈述、声明或判断中得出的直接推理。 二、推理方式及其分类: 1.演绎推理、归纳推理、默认推理 (1). 演绎推理:一般→个别 演绎推理是从全称判断推出特称判断或单称判断的过程,即从一般到个别的推理。最常用的形式是三段论法。 例如: 1)所有的推理系统都是智能系统; 2)专家系统是推理系统; 3)所以,专家系统是智能系统。 (2). 归纳推理: 个别→一般 是从足够多的事例中归纳出一般性结论的推理过程,是一种从个别到一般的推理过程,分为完全归纳推理,又称为必然性推理,不完全归纳推理,又称为非必然性推理。 例如:
(3). 默认推理: 默认推理又称缺省推理,它是在知识不完全的情况下假设某些条件已经具备所进行的推理。 例如: 2.确定性推理、不确定性推理 如果按推理时所用的知识的确定性来分,推理可分为确定性推理与不确定性推理。 (1)确定性推理(精确推理)。 如果在推理中所用的知识都是精确的,即可以把知识表示成必然的因果关系,然后进行逻辑推理,推理的结论或者为真,或者为假,这种推理就称为确定性推理。(如归结反演、基于规则的演绎系统等) (2)不确定性推理(不精确推理)。 在人类知识中,有相当一部分属于人们的主观判断,是不精确的和含糊的。由这些知识归纳出来的推理规则往往是不确定的。基于这种不确定的推理规则进行推理,形成的结论也是不确定的,这种推理称为不确定推理。(在专家系统中主要使用的方法)。 例如: 3.单调推理、非单调推理 如果按推理过程中推出的结论是否单调增加,或者说推出的结论是否越来越接近最终目标来划分,推理又可分为单调推理与非单调推理。 (1)单调推理。(基于经典逻辑的演绎推理) 是指在推理过程中随着推理的向前推进及新知识的加入,推出的结论呈单调增加的趋势,并且越来越接近最终目标。(演绎推理是单调推理。)
智能控制实验 姓名: 学号: 专业:控制理论与控制工程 代课老师: 日期:
实验目的: 1、通过实验进一步了解MATLAB软件的编程环境,学习编程技巧。 2、学习搜索相关论文,提高分析论文,找寻切入点的能力。 3、学习并掌握与计算机控制系统相关的控制算法。 实验内容: 1、专家PID控制系统Matlab仿真 2、模糊PID控制系统Matlab仿真 3、神经网络PID控制系统MATLAB仿真 前言 PID控制是最早发展起来的控制策略之一,在经典控制论证扮演重要角色,尽管当下各种智能控制层出不穷,由于其算法简单、鲁棒性好和可靠性高,被广泛应用于工业控制过程,尤其适用于可建立精确数学模型的确定性控制系统。而实际工业生产过程中往往具有非线性,时变不确定性,因而难以建立精确的数学模型,应用常规PID控制器不能达到到理想的控制效果,在实际生产过程中,由于受到参数整定方法繁杂的困扰,常规PID控制器参数往往整定不良,性能欠佳,对运行工况的适应性很差。因此常规PID控制的应用受到很大的限制和挑战。人们对PID应用的同时,也对其进行各种改进,主要体现在两个方面:一是对常规PID本身结构的改进,即变结构PID控制。另一方面,与模糊控制、神经网络控制和专家控制相结合,扬长避短,发挥各自的优势,形成所谓智能PID控制。使其具有不依赖系统精确数学模型的特点,对系统参数变化具有较好的鲁棒性。主要算法有:
基于规则的智能PID 自学习控制算法、加辨识信号的智能自整定PID 控制算法、专家式智能自整定PID 控制算法、模糊PID 控制算法、基于神经网络的PID 控制算法、自适应PID 预测智能控制算法和单神经元自适应PID 智能控制等多种控制算法。 结合具体实例,借助MATLAB 软件将专家PID 、模糊PID 以及神经网络PID 的设计程序M 文件自定义为一个函数,然后设计一个GUI 图形用户界面分别调用各自函数便于对比比较,易于操作。观察各自控制效果,并作分析。 假设一个速度控制器的传递函数为: 32523500 ()87.3510470G s s s s = ++ 输入信号为阶跃信号,取采样时间为1ms ,分别采用专家PID 、模糊PID 、神经网络PID 算法绘制阶跃响应曲线以及误差响应曲线。 一、实验原理: (一)、专家控制(Expert Control)的实质是基于受控对象和控制规律的各种知识,并以智能的方式利用这些知识来设计控制器。利用专家经验来设计PID 参数便构成专家PID 控制。基于模式识别的专家式PID 参数自整定控制器,不必要精确的辨识被控对象的数学模型,也不必要对被控过程加任何的激励信号就可以对PID 参数进行自整定。由它构成的控制系统运行稳定、有效、可靠。一般地,专家系统由专家知识库、数据库和逻辑推理机三个部分构成。专家知识库中己经把熟练操作工和专家的经验和知识,构成PID 参数选择手册,它记录了各种工况下被控对象特性所对应的P 、I 、D 参数,数据库根据被控对象的
2010级智能控制基础期末 复习思考题 一重要概念解释 1 智能控制 所谓的智能控制,即设计一个控制器(或系统),使之具有学习、抽象、推理、决策等功能,并能根据环境信息的变化做出适应性反应,从而实现由人来完成的任务。 2 专家系统与专家控制 专家系统是一类包含知识和推理的智能计算机程序,其内部包含某领域专家水平的知识和经验,具有解决专门问题的能力。 专家控制是智能控制的一个重要分支。所谓专家控制,是将专家系统的理论和技术同控制理论、方法与技术相结合,在未知环境下,仿效专家的经验,实现对系统的控制。它由知识库和推理机构构成主体框架,通过对控制领域知识的获取与组织,按某种策略及时的选用恰当的规则进行推理输出,实现对实际对象的控制 3 模糊集合与模糊关系,模糊推理模糊控制 ● 1)模糊集合:给定论域U 上的一个模糊集A %是指:对任何元素u U ∈ 都存在一个数()[] 0,1A u μ∈与之对应,表示元素u 属于集合A % 的程度,这个数称为元素u 对集合A %的隶属度,这个集合称为模糊集合。 ● 模糊关系:二元模糊关系:设A 、B 是两个非空集合,则直积(){},|,A B a b a A b B ?=∈∈中的一个 模糊集合 称为从A 到B 的一个模糊关系。模糊关系R %可由其隶属度(),R a b μ完全描述,隶属度 (),R a b μ 表明了元素a 与元素b 具有关系R %的程度。 ● 模糊推理:知道了语言控制规则中蕴含的模糊关系后,就可以根据模糊关系和输入情况,来确定输出 的情况,这就叫“模糊推理”。 4 神经网络? 答:人工神经网络是模拟人脑思维方式的数学模型。神经网络是在现代生物学研究人脑组织成果的基础上提出的,用来模拟人类大脑神经网络的结构和行为,对人脑进行抽象和简化,反映了人脑的基本特征,信息处理、学习、联想、模式分类、记忆等。 5 遗传算法 答:遗传算法将“优胜劣汰,适者生存”的生物进化原理引入优化参数形成的编码串联群体中,按所选择的适配置函数并通过遗传的复制、交叉及变异对个体进行筛选,使适配值高的个体被保留下来,组成新的群体,新的群体既继承了上一代的信息,又优于上一代。这样周而复始,群体中个体适应度不断提高,直到满足一定的条件。 一 专家控制部分 1. 专家系统的组成及各部分特点?
华南理工大学智能科学与技术专业培养计划标准化管理部编码-[99968T-6889628-J68568-1689N]
智能科学与技术 Intelligent Science and Technology 专业代码:080907T学制:4年 培养目标: 本专业培养具备良好的科学素质,系统地掌握智能科学与技术的基本理论、基本知识和基本技能与方法,在智能科学与工程领域具有较强的知识获取能力、知识工程能力和创新创业能力的宽口径复合型高质量以及具有计算机、自动化、电子等交叉学科基础的人才,能在企业、事业、科研部门、教育单位和行政部门等单位从事智能系统、智能信息处理、智能行为决策等方面的科学研究、开发设计、工程应用、决策管理和教学等工作。 目标1:(扎实的基础知识)具有扎实的自然科学基础知识、人文社会科学基础、外语综合应用、管理的基础知识,掌握本专业领域必需的科学技术基础理论知识,主要包括电路理论、模拟电子技术、数字电子技术、现代信号处理、经典控制理论与应用、计算机控制、智能控制导论、微机原理与接口技术、嵌入式系统、人工智能、机器人学导论、模式识别、图像处理、脑机接口与认知科学导论等,为将所学基础知识应用到本专业工程实践中去做好准备。 目标2:(解决问题能力)能够较好的掌握智能系统、智能信息处理等方面的专业知识,具有本专业领域1~2个方向的专业知识和技能,了解本专业学科的前沿和发展趋势,获得较好的工程实践训练,具有熟练的计算机应用能力。具有本专业的科学研究、科技开发和组织决策管理能力,具有较强的工作适应能力。能将智能技术与计算机技术、信息处理、控制技术有机结合应用于工程实践,具有创新意识和一定的创新能力。 目标3:(团队合作与领导能力)具有一定的组织管理能力、较强的表达能力和人际交往能力以及在团队中发挥作用的能力。 目标4:(工程系统认知能力)掌握智能科学与技术领域系统设计、集成、开发及工程应用的基本技能与实践方法,了解相关的工程应用技术。 目标5:(专业的社会影响评价能力)培养学生正确看待和认识智能科学与技术的发展及应用对人们日常生活、社会经济结构所产生的潜在影响。 目标6:(全球意识能力)具有国际化视野和良好的全球竞争意识,具有跨文化交流、竞争与合作能力。 目标7:(终身学习能力)具有适应发展的能力以及对终身学习的正确认识和较强的自学能力。 专业特色:
智能控制与应用实验报告神经网络控制器设计
一、 实验内容 考虑一个单连杆机器人控制系统,其可以描述为: 0.5sin()Mq mgl q y q τ+== 其中20.5M kgm =为杆的转动惯量,1m kg =为杆的质量,1l m =为杆长, 29.8/g m s =,q 为杆的角位置,q 为杆的角速度,q 为杆的角加速度, τ为系统的控制输入。具体要求: 1、设计神经网络控制器,对期望角度进行跟踪。 2、分析神经网络层数和神经元个数对控制性能的影响。 3、分析系统在神经网络控制和PID 控制作用下的抗干扰能力(加噪声干扰、加参数不确定)、抗非线性能力(加死区和饱和特性)、抗时滞的能力(对时滞大小加以改变)。 4、为系统设计神经网络PID 控制器(选作)。 二、 对象模型建立 根据公式(1),令状态量121=,x q x x = 得到系统状态方程为: 12121 0.5**sin() x x mgl x x M y x τ=-= = (1) 由此建立单连杆机器人的模型如图1所示。
图1 单连杆机器人模型 三、系统结构搭建及神经网络训练 1.系统PID结构如图2所示: 图2 系统PID结构图 PID参数设置为Kp=16,Ki=10,Kd=8得到响应曲线如图3所示:
01234 5678910 0.2 0.4 0.6 0.8 1 1.2 1.4 t/s a n g l e /r a d 图3 PID 控制响应曲线 采样PID 控制器的输入和输出进行神经网络训练 p=[a1';a2';a3']; t=b'; net=newff([-1 1;-1 1;-1 1],[3 8 16 8 1],{'tansig' 'tansig' 'tansig' 'logsig' 'purelin'}); net.trainparam.epochs=2500; net.trainparam.goal=0.00001; net=train(net,p,t); gensim(net,-1) 产生的神经网络控制器如图4所示:
1、已知某一炉温控制系统,要求温度保持在600度恒定。针对该控制系统有以下控制经验: (1)若炉温低于600度,则升压;低的越多升压越高。(2)若炉温高于600度,则降压;高的越多降压越低。(3)若炉温等于600度,则保持电压不变。 设模糊控制器为一维控制器,输入语言变量为误差,输出为控制电压。输入、输出变量的量化等级为7级,取5个模糊集。试设计隶属度函数误差变化划分表、控制电压变化划分表和模糊控制规则表。 解:1)确定变量 定义理想温度为600℃,实际温度为T,则温度误差为E=600-T。 将温度误差E作为输入变量 2)输入量和输出量的模糊化 将偏差E分为5个模糊集:NB、NS、ZO、PS、PB,分别为负小、负大、零、正小、正大。将偏差E的变化分为7个等级:-3 -2 -1 0 1 2 3,从而得到温度模糊表如表1所示。
表1 温度变化E划分表 控制电压u也分为5个模糊集:NB、NS、ZO、PS、PB,分别为负小、负大、零、正小、正大。将电压u的变化分为7个等级:-3 -2 -1 0 1 2 3,从而得到电压变化模糊表如表2所示。 表2 电压变化u划分表
表3 模糊控制规则表 E PB PS ZO NS NB u PB PS ZO NS NB
2、利用MATLAB,为下列两个系统设计模糊控制器使其稳态误差为零,超调量不大于1%,输出上升时间≤0.3s 。假定被控对象的传递函数分别为: 2 55 .01)1()(+=-s e s G s ) 456.864.1)(5.0(228 .4)(22+++= s s s s G 解: 在matlab 窗口命令中键入fuzzy ,得到如下键面: 设e 的论域范围为[-1 1],de 的论域范围为[-0.1 0.1],u 的论域范围为[0 2]。 将e 分为8个模糊集,分别为NB ,NM, NS, NZ, PZ, PS, PM, PB; de 分为7个模糊集,分别为NB ,NM ,NS, Z ,PS ,PM ,PB; u 分为7个模糊集,分别为NB ,NM ,NS, Z ,PS ,PM ,PB;
智能控制导论 姓名***** 学号****** 学院自动化与电气工程学院 专业控制科学与工程 班级***** 指导老师******
粒子群算法的小波神经网络在变压器故障诊断中的应用与改进 摘要:针对变压器故障征兆和故障类型的非线性特性,结合油中气体分析法,设计了一种改进粒子群算法的小波神经网络故障诊断模型。模型采用3层小波神经网络,并用一种改进粒子群算法对其进行训练。该算法在标准粒子群算法的基础上,通过引入遗传算法中的变异算子、惯性权重因子和高斯加权的全局极值,加快了小波神经网络训练速度,提高了其训练的精度。仿真实验证明这种改进粒子群算法的小波神经网络可以有效地运用到变压器故障诊断中,为变压器故障诊断提供了一条新途径。 引言:本文在变压器故障诊断智能方法的基础上,首先构造了3层小波神经网络模型,然后通过在标准粒子群算法中加入变异算子、惯性权重因子和高斯加权的全局极值,构成一种改进的粒子群优化算法,并将其运用于小波神经网络参数优化,通过变压器故障诊断结果表明这种改进的粒子群算法比相同条件下的BP 算法和标准粒子群算法具有更好的收敛性。 1 小波神经网络构建 小波神经网络是一种基于小波变换理论而构造的前馈神经网络,其充分利用了小波变换的局部化性质和神经网络的大规模数据并行处理、自学习能力,因而具有较强的逼近能力和较快的收敛速度,其主要可分为松散型和紧密型两种类型。本文采用紧密型结构来构造小波神经网络,构造出来的3层小波神经网络如图1 所示。 设输入层节点个数为m,隐含层小波元个数为n,输出层节点个数为N,输入层的第k 个输入样本为x k,输出层的第i 个节点实际输出值为y i,输出层的第i 个节点期望输出值为y?i,输入层节点k 与隐含层节点j 之间的连接权值为kj ,输出层节点i 与隐含层节点j 之间的连接权值 为ji ,第j 个隐层节点的伸缩平移系数分别为j a 和j b ,隐层小波神经元采用Mexican Hat 小波函数,输出层节点采用Sigmoid 函数。 通过前向计算得到隐含层第j 个小波元的输入为: 通过小波基伸缩平移系作用,隐含层第j 个小波元的输出为: 则网络输出层第i 个节点输出为:
IT职业规划 姓名:吴宇英 班级:计算机161 学号:201631960129 计算机科学导论期未大作业
一、职业规划前言 为什么我们要进行职业规划?当今社会竞争日益激烈,尤为IT行业格外明显,也就是说,每个人都想做白领,但事实上也就是少数人拿到了自己理想的工作及薪资,究其原因,是因为很多人随大众盲目追求有关IT的职业,而没有搞清楚自己的发展定位在哪里,人生需要一定的计划与忍耐,所以,一份合理实际的职业规划是青年实现梦想的有效方法。 职业生涯规划,简单来说,就是规划你以后想工作的岗位及岗位所需要的能力,然后就会有个方向,才能为之努力前行。其实,职业规划更多意义在于,一是可以很快的实现职业理想,从而实现职业上的自我价值,二是因理想的实现从而带动其他理想的促进,可以说,职业规划从某种意义上说,是人生的规划..... 所以,我要在职业规划里面找到自己的定位,养成积极的心态去面对以后日益激烈的社会竞争。 二、我的就业目标 我目前的目标是经过大学的学习,成为一个web前端开发工程师。 我觉得我的学习新知识能力较强,在web技术发展飞快的今天,一名合格的前端开发师需要努力适应web的发展速度,并且Web前端开发是一项很特殊的工作,涵盖的知识面非常广,既有具体的技术,又有抽象的理念。所以可以说说是一个需要不断学习适应的岗位。其次,我觉得我不怕吃苦,能耐得住寂寞,有缜密的思维能力,看过许许多多企业招web前端的要求,深切的感觉web前端开发的道路上充满了汗水和辛劳,但我想我能够承受,有可能成为一个不错的web前端开发工程师。 其实,这里也有一个小心理在作祟:我不大喜欢整天面对这代码,尽管说这是产生数据,是每个程序员都要走的路,但我并不认为自己能很快地从码农当中解脱出来,所以我并没有选择走后端开发,或许会被他人质疑,在大一仅仅只学习了C语言,居然不喜欢码代码!但我想说每个人有自己的兴趣取向,如果只是为了单纯的随波逐流,追随大众,那并不是我想要的职业规划,而且,那样的职业规划,我并没有很强的奋斗的动力,无异于一场空谈! 三、就业岗位描述及调研 前端工程师,也叫Web前端开发工程师。他是随着web发展,细分出来的行业。而当今的前端开发工程师,需要掌握三个要素:HTML5、CSS3和JavaScript及各种框架!许许多多的人认为web前端开发只需要了解如何设计网页以及美化,老实说,以前的我也是这么认为的,直到我查阅了相关的资料后才发现:web前端开发工程师不仅仅要掌握基本的Web前端开发技术,网站性能优化、SEO和服务器端的基础知识,而且要学会运用各种工具进行辅助开发以及理论层面的知识,包括代码的可维护性、组件的易用性、分层语义模板和浏览器分级支持等。而这些技术,可以说大学里没有很多的课程来教授你这些,所以,web前端倾向于自我学习,这对于还在大学就读的我来说是一个不错的岗位,至少,我有充裕的时间去学,而对于一个刚刚入门的人来说,一门新技术就是新技术! 随着近两三年来RIA(Rich Internet Applications的缩写,中文含义为:丰富的因特网应用程序)的流行和普及带来的诸如:Flash/Flex,Silverlight、XML和服务器端语言(PHP、https://www.doczj.com/doc/e513396324.html,,JSP、Python)等语言,前端开发工程师
《智能控制技术》实验报告书 学院: 专业: 学号: 姓名:
实验一:模糊控制与传统PID控制的性能比较 一、实验目的 通过本实验的学习,使学生了解传统PID控制、模糊控制等基本知识,掌握传统PID控制器设计、模糊控制器设计等知识,训练学生设计控制器的能力,培养他们利用MATLAB进行仿真的技能,为今后继续模糊控制理论研究以及控制仿真等学习奠定基础。 二、实验内容 本实验主要是设计一个典型环节的传统PID控制器以及模糊控制器,并对他们的控制性能进行比较。主要涉及自控原理、计算机仿真、智能控制、模糊控制等知识。 通常的工业过程可以等效成二阶系统加上一些典型的非线性环节,如死区、饱和、纯延迟等。这里,我们假设系统为:H(s)=20e0.02s/(1.6s2+4.4s+1) 控制执行机构具有0.07的死区和0.7的饱和区,取样时间间隔T=0.01。 设计系统的模糊控制,并与传统的PID控制的性能进行比较。 三、实验原理、方法和手段 1.实验原理: 1)对典型二阶环节,根据传统PID控制,设计PID控制器,选择合适的PID 控制器参数k p、k i、k d; 2)根据模糊控制规则,编写模糊控制器。 2.实验方法和手段: 1)在PID控制仿真中,经过仔细选择,我们取k p=5,k i=0.1,k d=0.001; 2)在模糊控制仿真中,我们取k e=60,k i=0.01,k d=2.5,k u=0.8; 3)模糊控制器的输出为:u= k u×fuzzy(k e×e, k d×e’)-k i×∫edt 其中积分项用于消除控制系统的稳态误差。 4)模糊控制规则如表1-1所示: 在MATLAB程序中,Nd用于表示系统的纯延迟(Nd=t d/T),umin用于表示控制的死区电平,umax用于表示饱和电平。当Nd=0时,表示系统不存在纯延迟。 5)根据上述给定内容,编写PID控制器、模糊控制器的MATLAB仿真程序,