模糊控制器的设计
PID控制器的设计
我们选定的被控对象的开环传递函数为G(s) ——-—3,采用经典
(S 1)(S 3)
的PID控制方法设计控制器时,由于被控对象为零型系统,因此我们必须加入积
分环节保证其稳态误差为0。
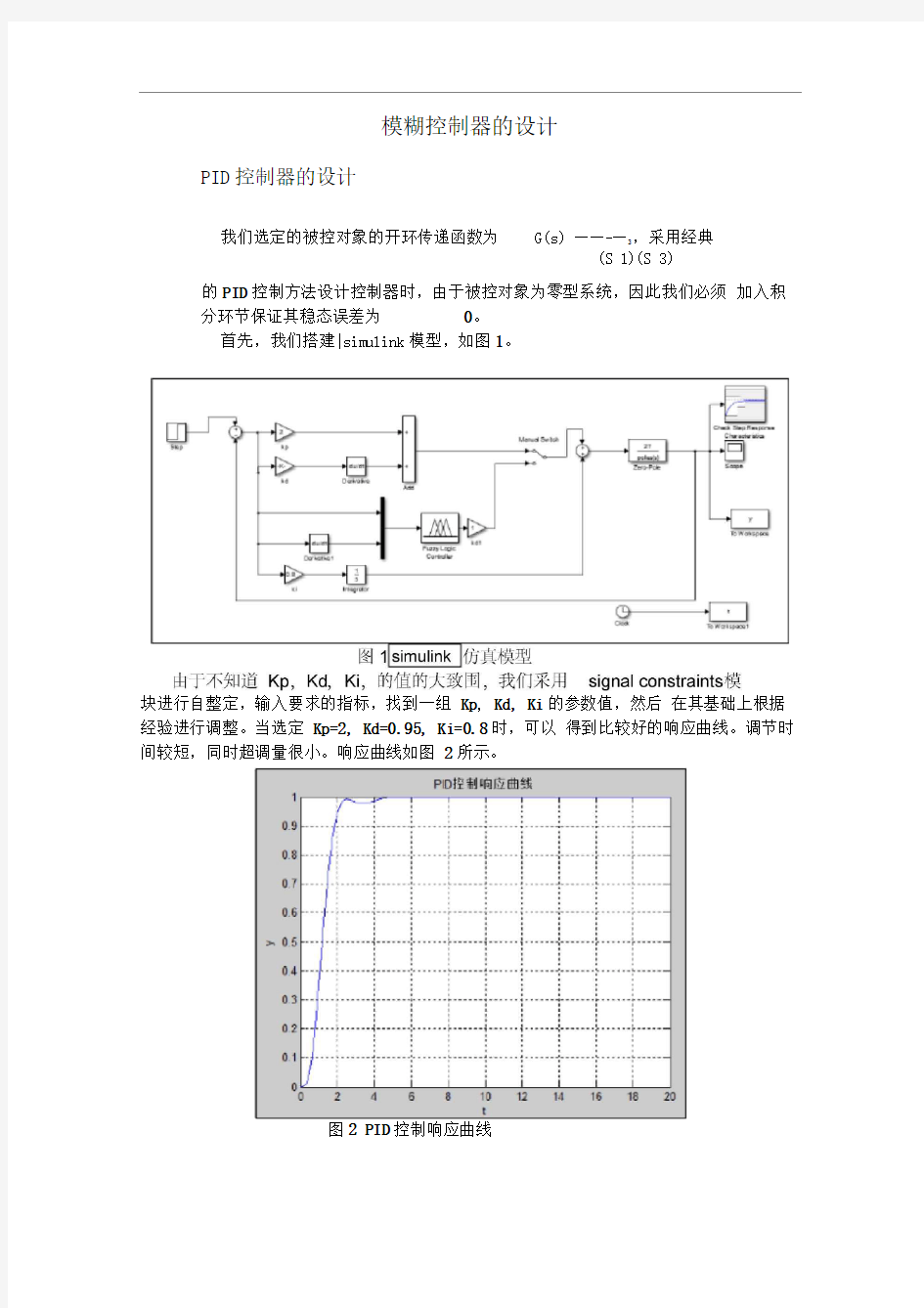
首先,我们搭建|simulink模型,如图1。
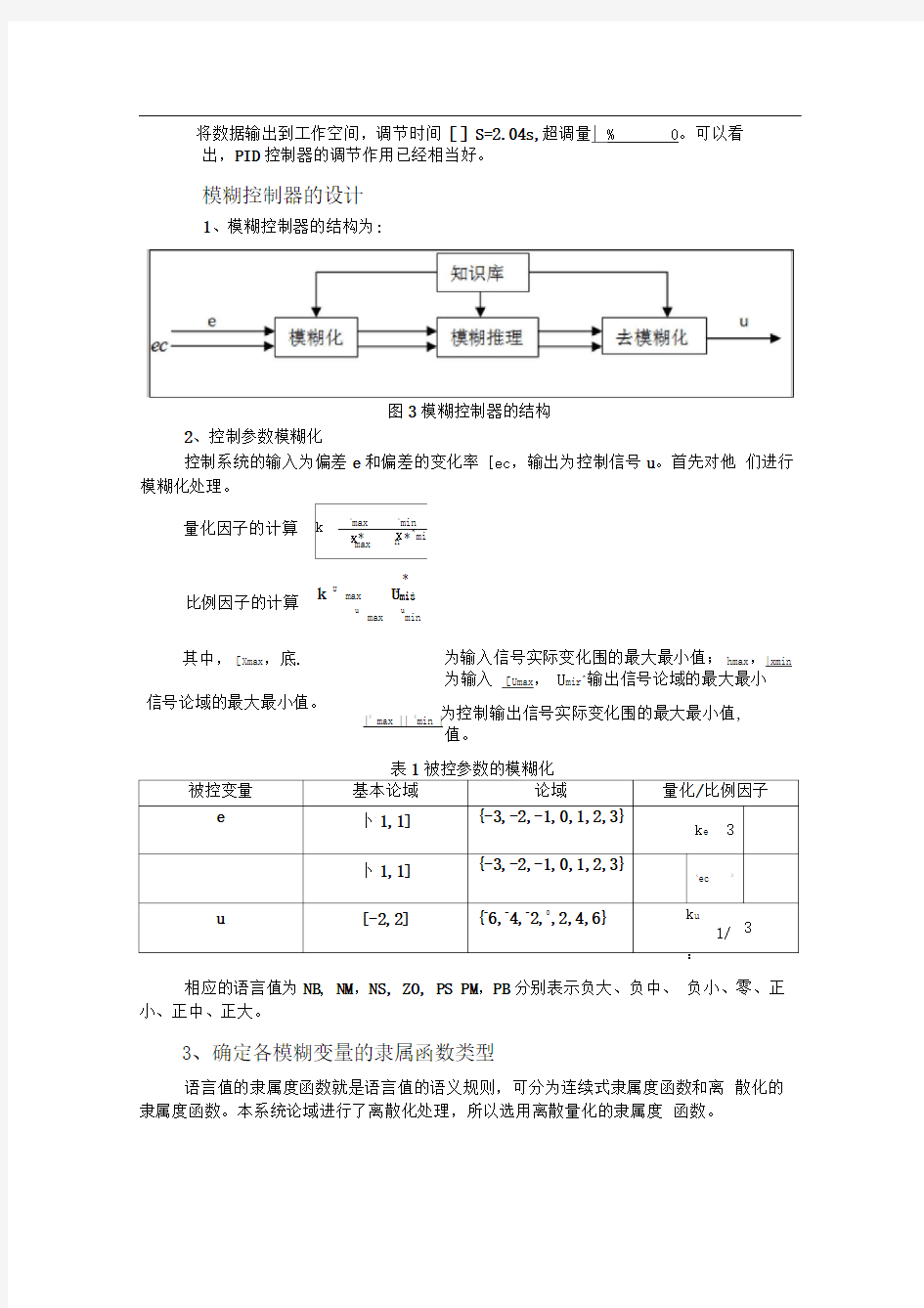
块进行自整定,输入要求的指标,找到一组Kp, Kd, Ki的参数值,然后在其基础上根据经验进行调整。当选定Kp=2, Kd=0.95, Ki=0.8时,可以得到比较好的响应曲线。调节时间较短,同时超调量很小。响应曲线如图2所示。
图2 PID控制响应曲线
将数据输出到工作空间,调节时间[]
S=2.04s,超调量| % 0。可以看
出,PID 控制器的调节作用已经相当好。
模糊控制器的设计
图3模糊控制器的结构
2、控制参数模糊化
控制系统的输入为偏差e 和偏差的变化率[ec ,输出为控制信号u 。首先对他 们进行模糊化处理。
为输入信号实际变化围的最大最小值; hmax ,|xmin 为输入 [Umax , U mir^输出信号论域的最大最小
值。
表1被控参数的模糊化
被控变量
基本论域 论域 量化/比例因子
e
卜1,1] {-3,-2,-1,0,1,2,3}
k e 3
卜1,1]
{-3,-2,-1,0,1,2,3}
k
ec
3
u
[-2,2]
{-6,-4,-2,0
,2,4,6}
k u
1/:
3
相应的语言值为NB , NM ,NS, ZO, PS PM ,PB 分别表示负大、负中、 负小、零、正
小、正中、正大。
3、确定各模糊变量的隶属函数类型
语言值的隶属度函数就是语言值的语义规则,可分为连续式隶属度函数和离 散化的隶属度函数。本系统论域进行了离散化处理,所以选用离散量化的隶属度 函数。
比例因子的计算 k
x
max x
min
* *
x ^max
x ^mi n
其中,[Xmax ,底. 信号论域的最大最小值。
|U max || U min |
为控制输出信号实际变化围的最大最小值, 1、模糊控制器的结构为:
量化因子的计算 *
u
mii
k U
max U min u max u
min
隶属度函数一般是根据操作人员的经验给出。设计中遵循的一般原则是:选
择的隶属度形状越陡,其分辨率就越高,模糊控制的灵敏度就越高;相反,如果隶属度函数形状越平缓,其分辨率就越低,控制性能就越平稳。所以在误差为零的区域附近,要采用高分辨率的隶属度函数,而在误差较大的区域选择分辨率低的隶属度函数,使系统获得较好的稳定性。
根据经验e,邑和u的隶属函数类型我们都选择了|gaussmf类型。如图4所示。
图4-1 Mamdany型控制器偏差e的隶属度函数
图4-2Mamdany型控制器偏差变化率西的隶属度函数
图4-3Mamdany型控制器输出u的隶属度函数
4、建立模糊控制规则
模糊控制规则对模糊控制器是否能取得好的控制效果起着非常关键的作用。常用的建立模糊规则的方法有经验归纳法和合成推理法两种。所谓的经验归纳法,就是根据专家经验、操作人员的长期实践和推测经过整理、归纳和提炼后构成模糊控制规则系统的方法。合成推理法就是根据已有的输入输出数据进行模糊推理合成,建立模糊规则。
首先我们尝试了根据PID控制所得到的数据进行模糊推理,建立模糊规则,但是经过反复调试所取得的控制效果并不理想。于是我们转而采用专家经验归纳的规则进行控制,在其基础上进行调整。
模糊条件语言为if e and [ec then u
表2模糊控制规则表
5、模糊控制查询表的建立
根据语言变量E和EC论域的量化等级,按照上面合成推理的方法,分别计算不同模糊变量值输入组合情况下的各个输出值,就可以获得一个模糊控制查询表。这将是一个7X 7(49点)的控制表。
在状态观测器中,同时输入e和ec的值,点击回车键,就会自动显示u的值。如
图5。
图5模糊推理规则观测器计算输出值按照此方法,依次计算出u的值。
表3模糊控制查询表
6、模糊控制器的构建及调试
利用| MATLAB |中的模糊工具箱构建模糊控制器,并且添加到控制系统中。为了消除稳态误差,仍然加入积分环节,根据PID调试结果,选择积分系数竺=0.8 将选择开关拨到模糊控制器,响应曲线如图6。
瓷杵怕歸疋]殊孙工範D D'|眾口(wi琦*出“
□ d d 在%?自跟山*|具「口品■ 3
图6调整前模糊控制响应曲线
我们发现在没有调整的情况下模糊控制器的控制效果非常差。于是我们调整
对隶属函数曲线的宽度、隶属函数的类型来改善控制效果。在调整的过程中我们发现,越靠近中间的曲线的宽度和类型对响应输出的影响越大,而最左和最右边
曲线的宽度和类型对输出的影响最小。通过适当增加e中间曲线的宽度,减小|ec 中间曲线的宽度,超调量减小,调节时间加快,调整后的隶属函数曲线如图7所示。
图7-1调整后的Mamdany型控制器偏差e的隶属函数
图7-2调整后的Mamdany型控制器偏差变化率回的隶属函数