2009年 第6期
仪表技术与传感器
I nstru ment Technique and Sens or 2009
No 16
收稿日期:2008-03-18 收修改稿日期:2009-03-09
基于PID 算法的可配置多通道温度控制系统
廖胜凯,刘银年,陈小文
(上海技术物理研究所,上海 200083)
摘要:介绍一种基于可配置思想、易于对复杂设备进行多点控温的系统软硬件设计方案。系统温度采集模块可同时采集64路温度信号数据;反馈执行模块可输出16路直接驱动小型加热片的P WM 信号和12路0~10V 模拟控制电压信号;数据处理算法模块采用可配置技术使得各闭环控制通道都能配置其输入输出以及在算法中的权重,增强了系统灵活性,控制算法采用P I D 及其变种算法。该系统在某星载遥感仪器的热真空试验和真空定标试验中成功应用。关键词:可配置;温度控制;多通道;P I D
中图分类号:TP273 文献标识码:A 文章编号:1002-1841(2009)06-0095-03
Conf i gurable M ulti 2channel Tem pera ture Con trol System Ba sed on P ID
L IAO Sheng 2kai,L IU Yin 2nian,CHE N Xiao 2wen
(Shangha i I n stitute of Techn i ca l Physi cs,Ch i n ese Academ y of Sc i ences,Shangha i 200083,Ch i n a)
Abstract:The design of a configurable multi 2channel te mperature contr ol system based on P I D theory was described .Te mper 2ature measure ment module of 64channels,heating module out put 16channels of P WM signal and 12channels of 0~10V anal og signal and configurable s oft w are based on P I D theory were included .This syste m can be easily changed t o meet different require 2ment and it was used successfully in the hot 2vacuum experi m ent and calibrati on experi m ent of a radi ometer .Key words:configurable;te mperature contr ol;multi 2channel;P I D 0 引言
随着被控对象结构、温度控制范围、精度要求不同,温控设备中测量温度的方法、对温度进行反馈控制的方法和控制策略也不同。文中提出一种基于可配置思想和P I D 控制算法、易于对复杂设备的进行多点控温或同时对多个小型设备进行控温的系统软硬件设计方法。该方法采用模块化设计,在不更改硬件模块情况下通过对软件的配置,易于满足不同被控对象的不同控制需求,提供了设备灵活性,减小了成本。该系统已在某星载遥感仪器的热真空试验和真空定标试验中成功应用。
温控系统包括温度采集输入、控制算法和反馈控制输出3个要素。简单被控系统温度输入与反馈输出是一一对应关系;一些结构复杂的被控系统如光学设备有多个温度信号采样点而只能安装单个反馈控制设备与之对应,不同温度采集点与反馈控制设备相互关系不同又导致其作为输入在算法中权重不同;一些大型系统由于反馈加热功率要求大,为减小成本采用多个反馈控制设备并联工作与一个温度采样点对应等。因此温控系统中每个控制闭环算法的输入输出包括一对一、多对一和一对多或其他多对多等情况。温控系统要在不同被控系统中灵活应用则要求每个控制通道的温度输入以及其权重、控制算法参数和输出设备都可以灵活配置。该系统温度采集输入和反馈控制输出都由硬件模块实现,其中反馈控制输出包括
P WM 输出和模拟控制电压输出,在不更改硬件情况下,采用软
件提取控制配置接口使之在闭环中作为一个可选择对象,达到上述可配置目的。
P I D [1]
算法通过对反馈量进行比例积分微分运算得到相应
控制量输出给执行机构达到闭环控制目的。根据实现方式不同可以分为模拟P I D 算法和数字P I D 算法,后者易于在数字系统实现,调试简单,参数不受外界环境影响。数字P I D 算法又可以分为位置式和增量式,系统采用增量式数字P I D 算法,其表达式表达如下。
Δu (k )=K p Δe (k )+K I e (k )+K D [Δe (k )-Δe (k -1)]式中:k 为采样序号,k =0,1,2……;u (k )为第k 次采样时刻的计算机输出值;e (k )为第k 次采样时刻输入偏差值;e (k -1)第
k -1次采样时刻输入偏差值;Δe (k )=e (k )-e (k -1);K P 为比
例系数;K I 为积分系数;K D 为微分系数。
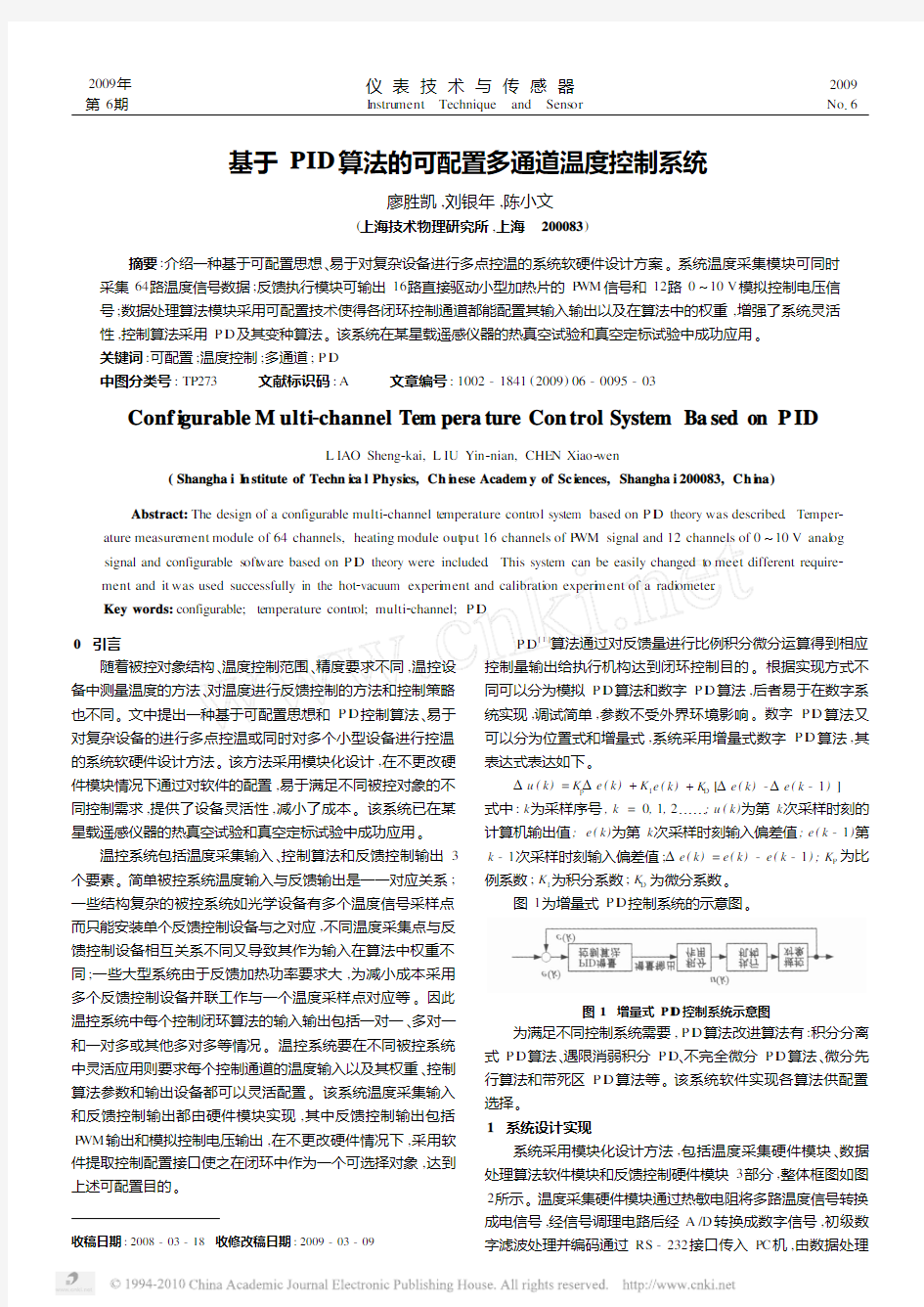
图1为增量式P I D 控制系统的示意图
。
图1 增量式P I D 控制系统示意图
为满足不同控制系统需要,P I D 算法改进算法有:积分分离式P I D 算法、遇限消弱积分P I D 、不完全微分P I D 算法、微分先行算法和带死区P I D 算法等。该系统软件实现各算法供配置选择。
1 系统设计实现
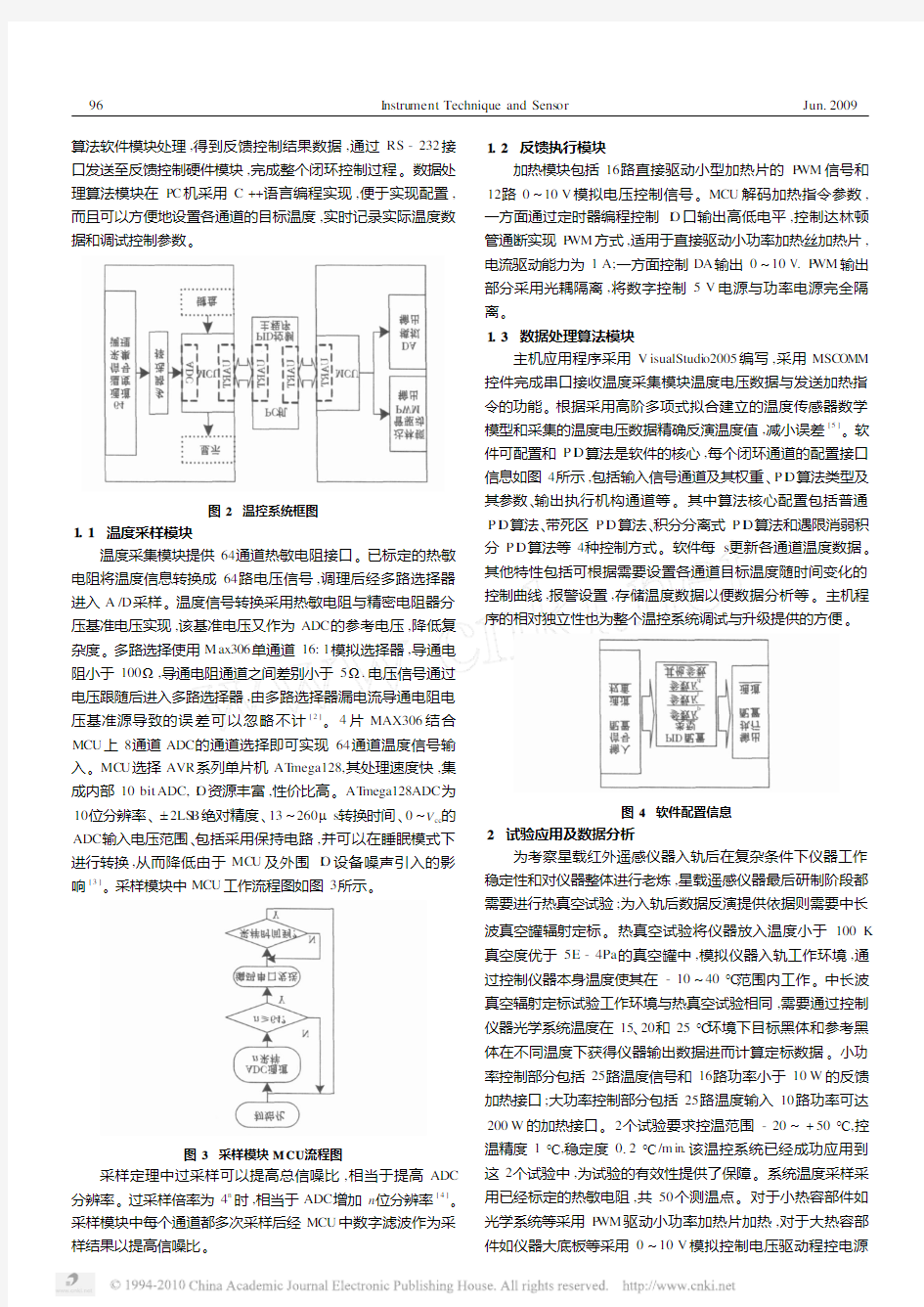
系统采用模块化设计方法,包括温度采集硬件模块、数据处理算法软件模块和反馈控制硬件模块3部分,整体框图如图
2所示。温度采集硬件模块通过热敏电阻将多路温度信号转换
成电信号,经信号调理电路后经A /D 转换成数字信号,初级数
字滤波处理并编码通过RS -232接口传入PC 机,由数据处理
96
I nstru ment Technique and Sens or
Jun 12009
算法软件模块处理,得到反馈控制结果数据,通过RS -232接口发送至反馈控制硬件模块,完成整个闭环控制过程。数据处理算法模块在PC 机采用C ++语言编程实现,便于实现配置,而且可以方便地设置各通道的目标温度,实时记录实际温度数据和调试控制参数
。
图2 温控系统框图
1.1 温度采样模块
温度采集模块提供64通道热敏电阻接口。已标定的热敏电阻将温度信息转换成64路电压信号,调理后经多路选择器进入A /D 采样。温度信号转换采用热敏电阻与精密电阻器分压基准电压实现,该基准电压又作为ADC 的参考电压,降低复杂度。多路选择使用M ax306单通道16:1模拟选择器,导通电阻小于100Ω,导通电阻通道之间差别小于5Ω.电压信号通过电压跟随后进入多路选择器,由多路选择器漏电流导通电阻电压基准源导致的误差可以忽略不计[2]。4片MAX306结合
MCU 上8通道ADC 的通道选择即可实现64通道温度信号输
入。MC U 选择AVR 系列单片机AT mega128,其处理速度快,集成内部10bit ADC,I O 资源丰富,性价比高。AT mega128ADC 为
10位分辨率、±2LS B 绝对精度、13~260μs 转换时间、0~V cc 的ADC 输入电压范围、包括采用保持电路,并可以在睡眠模式下
进行转换,从而降低由于MC U 及外围I O 设备噪声引入的影响[3]。采样模块中MCU 工作流程图如图3所示
。
图3 采样模块M CU 流程图
采样定理中过采样可以提高总信噪比,相当于提高ADC 分辨率。过采样倍率为4n 时,相当于ADC 增加n 位分辨率[4]。采样模块中每个通道都多次采样后经MCU 中数字滤波作为采样结果以提高信噪比。
1.2 反馈执行模块
加热模块包括16路直接驱动小型加热片的P WM 信号和
12路0~10V 模拟电压控制信号。MCU 解码加热指令参数,
一方面通过定时器编程控制I O 口输出高低电平,控制达林顿管通断实现P WM 方式,适用于直接驱动小功率加热丝加热片,电流驱动能力为1A;一方面控制DA 输出0~10V.P WM 输出部分采用光耦隔离,将数字控制5V 电源与功率电源完全隔离。
1.3 数据处理算法模块
主机应用程序采用V isualStudi o2005编写,采用MSC OMM 控件完成串口接收温度采集模块温度电压数据与发送加热指令的功能。根据采用高阶多项式拟合建立的温度传感器数学模型和采集的温度电压数据精确反演温度值,减小误差[5]。软件可配置和P I D 算法是软件的核心,每个闭环通道的配置接口信息如图4所示,包括输入信号通道及其权重、P I D 算法类型及
其参数、输出执行机构通道等。其中算法核心配置包括普通
P I D 算法、带死区P I D 算法、积分分离式P I D 算法和遇限消弱积
分P I D 算法等4种控制方式。软件每s 更新各通道温度数据。其他特性包括可根据需要设置各通道目标温度随时间变化的控制曲线,报警设置,存储温度数据以便数据分析等。主机程
序的相对独立性也为整个温控系统调试与升级提供的方便。
图4 软件配置信息
2 试验应用及数据分析
为考察星载红外遥感仪器入轨后在复杂条件下仪器工作稳定性和对仪器整体进行老炼,星载遥感仪器最后研制阶段都需要进行热真空试验;为入轨后数据反演提供依据则需要中长波真空罐辐射定标。热真空试验将仪器放入温度小于100K 真空度优于5E -4Pa 的真空罐中,模拟仪器入轨工作环境,通过控制仪器本身温度使其在-10~40℃范围内工作。中长波真空辐射定标试验工作环境与热真空试验相同,需要通过控制仪器光学系统温度在15、20和25℃环境下目标黑体和参考黑体在不同温度下获得仪器输出数据进而计算定标数据。小功率控制部分包括25路温度信号和16路功率小于10W 的反馈加热接口;大功率控制部分包括25路温度输入10路功率可达
200W 的加热接口。2个试验要求控温范围-20~+50℃,控
温精度1℃,稳定度012℃/m in .该温控系统已经成功应用到这2个试验中,为试验的有效性提供了保障。系统温度采样采用已经标定的热敏电阻,共50个测温点。对于小热容部件如光学系统等采用P WM 驱动小功率加热片加热,对于大热容部件如仪器大底板等采用0~10V 模拟控制电压驱动程控电源
第6期
廖胜凯等:基于P I D 算法的可配置多通道温度控制系统
97
加热。2个试验中温度控制均高于指标要求。标准黑体降温曲线图如图5所示,主光学系统温度控制曲线如图6所示
。
热敏电阻阻值与温度对应关系已知,则可以采用测量电阻的方式测定温度采集模块准确性。根据已经标定的热敏电阻曲线反演出实际电阻真实值与系统测量值对应的温度,在控温范围内取10个采样点各采集100个数据分析,误差绝对值最大值为
0139℃.热敏电阻标定误差为±013℃,则在控温范围内测温
绝对精度小于017℃.
3 结束语
由温度采集模块、反馈执行模块以及可配置软件模块组成的易于应用于不同控制目的的温度控制系统设计完成并在某星载仪器的两个试验中得到成功验证。测温精度和控温精度都超过指标要求,为试验数据有效性提供有力保障,并为以后的其他试验提供了好的温控平台。该温度控制系统具有良好的灵活性,只需通过软件配置即可满足其他温控任务需求,便于应用到其他场所,具有一定的应用前景。参考文献:
[1] 陶永华,尹怡欣,葛芦生.新型P I D 控制及其应用.2版.北京:机
械工业出版社,2001.
[2] 王敏,张铮.温度测控系统中时漂和温漂问题的智能解决方法.
仪表技术与传感器,2005(2):9-11.
[3] AVR Enhanced R isc M icr ocontr oller Databook [EB /OL ].[2008-04
-08].
[4] Silicon Laborat ories I nc .I m p r oving ADC Res oluti on by Oversa mp ling
and Averaging :Silicon Lab App licati on Note AN118Rev .1.22003,[EB /OL ].[2008-04-08].www .silabs .com
[5] 梁丹,侯冬.温度传感器的数学模型以及应用.仪表技术与传感
器,2005(6):58-59.
作者简介:廖胜凯(1983—),博士研究生,主要从事遥感信号与信息处
理及电子系统设计。E 2mail:liaoskws@ustc .edu
(上接第94页)
(2)计算其均值V m =[max (V out )+m in (V out )]/2=010843V.
(3)要求在+1g 时输出V out =015V,则增益G =V out /V m =519286.
(4)计算增益控制电阻R G =4914/(G -1)=101023k Ω.3 补偿前后误差分析
由上述分析确定出R T =0134k
Ω,R b1=15k Ω,R b2=1k Ω(根据V b =011572V ),R G =10k Ω.将补偿电路接入相应阻值,
按前述测试方法重新测试,得到V out 实测值与理论值及偏差见表4,补偿前后相对误差对比见表5。
表4 V out 实测值与理论值及偏差
T /℃
实测值/V
理论值/V
偏差值/V
相对误差/%
-55014984015000-010016-01326-4501504901500001004901980-200150940150000100941187100151050150000101052110820015177015000010177315344001512901500001012921583600150220150000100220144570
014969
015000
-010030
-01623
表5 补偿前后相对误差对比
T /℃
补偿前/%补偿后/%T /℃
补偿前/%补偿后/%-55
38175-0132620
-510031534-45331750198040-1817521583-20181751187160-33175014450
612521108
70
-41125-01623
由表5可知:补偿前在低温区(-55~-20℃)和高温区
(40~70℃)输出偏差超出15%,补偿后在整个温区(-55~
70℃)内输出偏差小于4%,较好地降低了温度变化的影响。4 结束语
采用一次线性预测模拟加速度传感器的温度影响和实测数据的变化规律完全吻合,而且分离出的V g ′可以完全反映无温度影响时的传感器输出真值;采用文中提出的补偿方案,只需要一次测定传感器在1g 激励下不同温度的响应曲线,便可
预测出调整参数的精确数值,便于批量生产。参考文献:
[1] 郭涛.压阻式硅基传感器的温度补偿方法研究.微纳电子技术,
2003(8):489-491.
[2] 王晓红,吴德会.基于LS -S VM 的传感器智能校正及温度补偿.
传感器与微系统,2007,26(3):76-79.
[3] 唐晓刚,颜永安,王建民,等.ME MS 差动电容加速度传感器.仪表
技术与传感器,2005(12):8-15.
[4] 王少华,李彦伟,欧进萍.基于ME MS 的微电容式无线加速度传感
器的研究.传感器与微系统,2007,26(6):94-96.
作者简介:杨录(1968—),副教授,硕士,主要研究领域为信息与信号处
理、测试技术。E 2mail:tyzyhzyh@https://www.doczj.com/doc/e110563256.html,
基于PID法的温度控制 摘要:一种新型的PID温度控制系统,该系统采用单片机芯片,可方便对系统加热周期T及PID中的个参数进行线性修改;具有对高低进行报警功能。主要研究PID算法。 关键字:单片机;温度控制;PID控制器 引言:在化工、石油、冶金等生产过程的物理过程和化学反应中,温度往往是一个很重要的量,为了达到所需的精度范围,采用PID控制,对PID的各种参数进行整定以满足不同的场合。 一、温度控制器的主要问题及解决方法 1、传统的温度控制器的问题 传统的温度控制器的电热元件一般以电热棒、发热圈为主,两者里面都用发热丝制成。发热丝通过电流加热时,通常达到1000℃以上,所以发热棒、发热圈内部温度都很高。一般进行温度控制的电器机械,其控制温度多在0-400℃之间,所以,传统的温度控制器进行温度控制期间,当被加热器件温度升高至设定温度时,温度控制器会发出信号停止加热。但这时发热棒或发热圈的内部温度会高于400℃,发热棒、发热圈还将会对被加热的器件进行加热,即使温度控制器发出信号停止加热,被加热器件的温度还往往继续上升几度,然后才开始下降。当下降到设定温度的下限时,温度控制器又开始发出加热的信号,
开始加热,但发热丝要把温度传递到被加热器件需要一定的时候,这就要视乎发热丝与被加热器件之间的介质情况而定。通常开始重新加热时,温度继续下降几度。所以,传统的定点开关控制温度会有正负误差几度的现象,但这不是温度控制器本身的问题,而是整个热系统的结构性问题,使温度控制器控温产生一种惯性温度误差。 2、PID控制解决 要解决温度控制器这个问题,采用PID控制技术,是明智的选择。PID控制,是针对以上的情况而制定的、新的温度控制方案,用先进的数码技术通过Pvar、Ivar、Dvar三方面的结合调整,形成一个模糊控制,来解决惯性温度误差问题。然而,在很多情况下,由于传统的温度控制器温控方式存在较大的惯性温度误差,往往在要求精确的温控时,很多人会放弃自动控制而采用调压器来代替温度控制器。但是用调压器来代替温度控制器时,必须在很大程度上靠人力调节,随着工作环境的变化而用人手调好所需温度的度数,然后靠相对稳定的电压来通电加热,勉强运作,但这决不是自动控温。当需要控温的关键很多时,就会手忙脚乱。这样,调压器就派不上用场,因为靠人手不能同时调节那么多需要温控的关键,只有采用PID模糊控制技术,才能解决这个问题,使操作得心应手,运行畅顺。 二、该温控系统的结构和原理: 1、系统的结构: 系统功能主要实现断水保护和高水位指示、自动保温、自动报警
三菱PLC和FX2N-4AD-TC实现温度PID闭环控制系统的学习参考。。。。。。
风机鼓入的新风经加热交换器、制冷交换器、进入房间。原理说明:进风不断被受热体加温,欲使进风维持一定的温度,这就需要同时有一加热器以不同加热量给进风加热,这样才能保证进风温度保持恒定。 plc接线图如下,按图接好线。配线时,应使用带屏蔽的补偿导线和模拟输入电缆配合,屏蔽一切可能产生的干扰。fx2n-4ad-tc的特殊功能模块编号为0。
输入和输出点分配表 这里介绍pid控制改变加热器(热盘管)的加热时间从而实现对温度的闭环控制。
在温度控制系统中,电加热器加热,温度用热电耦检测,与热电耦型温度传感器匹配的模拟量输入模块 fx2n-4ad-tc将温度转换为数字输出,cpu将检测的温度与温度设定值比较,通过plc的pid控制改变加热器的加热时间从而实现对温度的闭环控制。pid控制时和自动调谐时电加热器的动作情况如上图所示。其参数设定内容如下表所示。 三菱plc和fx2n-4ad-tc实现温度pid闭环控制系统程序设计:
用选择开关置x10作为自动调谐控制后的pid控制,用选择开关置x11作为无自动调谐的pid控制。 当选择开关置x10时,控制用参数的设定值在pid运算前必须预先通过指令写入,见图程序0步开始,m8002为初始化脉冲,用mov指令将目标值、输入滤波常数、微分增益、输出值上限、输出值下限的设定值分别传送给数据寄存器d500、d512、d515、d532、d533。 程序第26步,使m0得电,使用自动调谐功能是为了得到最佳pid控制,自动调谐不能自动设定的参数必须通过指令设定,在第29步~47步之间用mov指令将自动调谐用的参数(自动调谐采用时间、动作方向自动调谐开始、自动调谐用输出值)分别传送给数据寄存器d510、d511、d502。 程序第53步开始,对fx2n-4ad-tc进行确认、模式设定,且在plc运行中读取来自fx2n-4ad-tc的数据送到plc的d501中,103步开始对pid动作进行初始化。 第116步开始,x10闭合,在自动调谐后实行pid控制,当自动调谐开始时的测定值达到目标值的变化量变化1/3以上,则自动调谐结束,程序第128步~140步,自动调谐
温度控制与PID算法 温度控制与PID算法j较为复杂,下面结合实际浅显易懂的阐述一下PID控制理论,将温度控制及PID算法作一个简单的描述。 1.温度控制的框图 这是一个典型的闭环控制系统,用于控制加热温区的温度(PV)保持在恒定的温度设定值(SV)。系统通过温度采集单元反馈回来的实时温度信号(PV)获取偏差值(EV),偏差值经过PID调节器运算输出,控制发热管的发热功率,以克服偏差,促使偏差趋近于零。例如,当某一时刻炉内过PCB板较多,带走的热量较多时,即导致温区温度下降,这时,通过反馈的调节作用,将使温度迅速回升。其调节过程如下:
温度控制的功率输出采用脉宽调制的方法。固态继电器SSR的输出端为脉宽可调的电压U OUT 。当SSR的触发角触发时,电源电压U AN通过SSR的输出端加到发热管的两端;当SSR的触发角没有触发信号时,SSR关断。因此,发热管两端的平均电压为U d=(t/T)* U AN=K* U AN 其中K=t/T,为一个周期T中,SSR触发导通的比率,称为负载电压系数或是占空比,K 的变化率在0-1之间。一般是周期T固定不便,调节t, 当t在0-T的范围内变化时,发热管的电压即在0-U AN之间变化,这种调节方法称为定频调宽法。下面将要描述的PID 调节器的算式在这里的实质即是运算求出一个实时变化的,能够保证加热温区在外界干扰的情况下仍能保持温度在一个较小的范围内变化的合理的负载电压系数K。 2.温度控制的两个阶段 温度控制系统是一个惯性较大的系统,也就是说,当给温区开始加热之后,并不能立即观察得到温区温度的明显上升;同样的,当关闭加热之后,温区的温度仍然有一定程度的上升。另外,热电偶对温度的检测,与实际的温区温度相比较,也存在一定的滞后效应。这给温度的控制带来了困难。因此,如果在温度检测值(PV)到达设定值时才关断输出,可能因温度的滞后效应而长时间超出设定值,需要较长时间才能回到设定值;如果在温度检测值(PV)未到设定值时即关断输出,则可能因关断较早而导致温度难以达到设定值。为了合理地处理系统响应速度(即加热速度)与系统稳定性之间地矛盾,我们把温度控制分为两个阶段。
PID温度控制系统的设计 介紹以单片机为核心的PID控制温度控制系统,并给出了系统的硬件与软件设计方案。实验结果显示该系统的先进性。 标签:温控系统单片机PID控制 0 引言 控制仪表性能指标对温度控制有很大的影响,因此,常采用高性能调节仪表组成温控系统对被控对象(温度)进行严格控制。本文介绍以单片机AT89C51为核心器件构成的温度控制系统,它具有测量、控制精度高、成本低、体积小、功耗低等优点,可制成单机,广泛应用于冶金、化工、食品加工等行业对温度进行精确控制。 1 温控系统结构与工作原理 温控系统的结构如图1所示。热电偶测量出电炉的实际温度(mv信号),经放大、线性化、A/D转换处理后送入单片机接口。由键盘敲入设定温度值,此值与经A/D转换过的炉温信号存在一差值(假如两者温度不一致),由单片机PID调节电路进行比例、微分及变速积分算法对温控箱进行恒温控制。该系统采用传统的AT89C52单片机,其硬、软件完全符合系统的要求,为满足测控精确度的要求,A/D 电路选用12位转换器,分辨率为2-12。本系统采用三相数字过零触发器对六只晶闸管(Y/△接法均可)进行输出功率控制,即在电源电压过零时触发晶闸管,利用PID信号产生的控制信号使电流每周期按规定的导通波头数导通负载,达到控制输出功率,也就是控制炉温的目的。采用过零触发可减少电网谐波的产生,触发器与单片机光电隔离,可减少电网对微机的干扰,调功方式下电加温炉的平均功率为:P=3nU2/NR(1) 式中:P为输入电炉的功率;R为电炉的等效电阻;U为电网相电压;n为允许导通的波头数;N为设定的波头数。 注:公式(1)为负载Y接法适用 2 系统控制软件设计 2.1 PID参数的优化系统采用遗传算法(Genetic Algorithm,简称GA)离线优化PID参数[1]。20世纪70年代由美国J.Holland教授提出的遗传算法(GA)[2]是一种模拟生物进化过程的随机化搜索方法。它采用多路径搜索,对变量进行编码处理,用对码串的遗传操作代替对变量的直接操作,从而可以更好的处理离散变量。GA用目标函数本身建立寻优方向,无需求导求逆等复导数数学运算,且可以方便的引入各种约束条件,更有利于得到最优解,适合于处理混合非线性规划和多目标优化。系统采用二进制编码选择来操作,我们称为染色体串(0或1),每个串表
(2014届) 毕业设计 题目:基于PID的温度控制系统设计学院: ******** 专业:电气工程及其自动化 班级:电气*** 学号: ********** 姓名:某某某 指导教师:某某某 教务处制 年月日
诚信声明 我声明,所呈交的论文是本人在老师指导下进行的研究工作及取得的研究成果。据我查证,除了文中特别加以标注和致谢的地方外,论文中不包含其他人已经发表或撰写过的研究成果,也不包含为获得______或其他教育机构的学位或证书而使用过的材料。我承诺,论文中的所有内容均真实、可信。 论文作者签名:签名日期:年月日
授权声明 学校有权保留送论文交的原件,允许论文被查阅和借阅,学校可以公布论文的全部或部分内容,可以影印、缩印或其他复制手段保存论文,学校必须严格按照授权对论文进行处理,不得超越授权对论文进行任意处置。 论文作者签名:签名日期:年月日
基于PID的温度控制系统设计 摘要 温度是工业上最基本的参数,与人们的生活紧密相关,实时测量温度在工业生产中越来越受到重视,离不开温度测量所带来的好处,因此研究控制和测量温度具有及其重要的意义。 本设计介绍了以AT89C52单片机为主控器件,基于PID的温度控制系统的设计方案和设计的基本原理。由DS18B20收集温度信号,并以数字信号的方式送给单片机进行处理,从而达到温度控制的目标。主要包括硬件电路的设计和系统程序的设计。硬件电路由主控器件、温测电路、温控电路和显示电路等组成。软件设计部分包括:显示电路、温度信号处理,超温警报、继电器控制、按键处理等程序。 关键词:温度检测,温度控制,PID算法
温度的PID 控制 一.温度检测部分首先要OK. 二、PID 调节作用 PID 控制时域的公式 ))()(1)(()(?++ =dt t de Td t e Ti t e Kp t y 分解开来: (1) 比例调节器 y(t) = Kp * e(t) e(k) 为当前的温差(设定值与检测值的插值) y(k) 为当前输出的控制信号(需要转化为PWM 形式) # 输出与输入偏差成正比。只要偏差出现,就能及时地产生与之成比例的调节 作用,使被控量朝着减小偏差的方向变化,具有调节及时的特点。但是, Kp 过大会导致动态品质变坏,甚至使系统不稳定。比例调节器的特性曲线. (2) 积分调节器 y(t) = Ki * ∫(e(t))dt Ki = Kp/Ti Ti 为积分时间 #TI 是积分时间常数,它表示积分速度的大小,Ti 越大,积分速度越慢,积分作用越弱。只要偏差不为零就会产生对应的控制量并依此影响被控量。增大Ti 会减小积分作用,即减慢消除静差的过程,减小超调,提高稳定性。 (3) 微分调节器 y(t) = Kd*d(e(t))/dt Kd = Kp*Td Td 为微分时间 #微分分量对偏差的任何变化都会产生控制作用,以调整系统输出,阻止偏差变化。偏差变化越快,则产生的阻止作用越大。从分析看出,微分作用的特点是:加入微分调节将有助于减小超调量,克服震荡,使系统趋于稳定。他加快了系统的动作速度,减小调整的时间,从而改善了系统的动态性能。 三.PID 算法: 由时域的公式离散化后可得如下公式:
y(k) = y(k-1)+(Kp+Ki+Kd)*e(k)-(Kp +2*Kd)*e(k-1) + Kd*e(k-2) y(k) 为当前输出的控制信号(需要转化为PWM形式) y(k-1)为前一次输出的控制信号 e(k) 为当前的温差(设定值与检测值的插值) e(k-1) 为一次前的温差 e(k-2) 为二次前的温差 Kp 为比例系数 Ki = Kp*T/Ti T为采样周期 Kd = Kp*Td/T 四.PID参数整定(确定Kp,Ts,Ti,Td): 温度控制适合衰减曲线法,需要根据多次采样的数据画出响应曲线。 所以需要通过串口将采样时间t, 输出y(t)记录下来,方便分析。 1)、不加入算法,系统全速加热,从常温加热到较高的温度的时间为Tk, 则采样时间一般设为 T = Tk/10。 2)、置调节器积分时间TI=∞,微分时间TD=0,即只加比例算法: y(k) = y(k-1)+Kp*e(k) 比例带δ置于较大的值。将系统投入运行。(δ = 1/Kp) 3)、待系统工作稳定后,对设定值作阶跃扰动,然后观察系统的响应。若响应振荡衰减太快,就减小比例带;反之,则增大比例带。如此反复,直到出现如图所示的衰减比为4:1的振荡过程时,记录此时的δ值(设为δS),以及TS 的值(如图中所示)。当采用衰减比为10:1振荡过程时,应用上升时间Tr替代 振荡周期TS计算。 系统衰减振荡曲线 图中,TS为衰减振荡周期,Tr为响应上升时间。 据表中所给的经验公式计算δ、TI及TD的参数。
PID温度控制器原理 | [<<][>>] 电脑控制温度控制器:采用PID模糊控制技术 *用先进数码技术通过Pvar、Ivar、Dvar(比例、积分、微分)三方面结合调整形成一个模糊控制来解决惯性温度误差问题。 据了解,很多厂家在使用温度控制器过程中,往往碰到惯性温度误差问题,苦于无法解决,依*手工调压来控制温度。 创新,采用了PID模糊控制技术,较好地解决了惯性温度误差问题。传统温度控制器,是利用热电偶线在温度化变化情况下,产生变化电流作为控制信号,对电器元件作定点开关控制器。 传统温度控制器电热元件一般以电热棒、发热圈为主,两者里面都用发热丝制成。发热丝通过电流加热时,通常达到1000℃以上,所以发热棒、发热圈内部温度都很高。一般进行温度控制电器机械,其控制温度多在0-400℃之间,所以,传统温度控制器进行温度控制期间,当被加热器件温度升高至设定温度时,温度控制器会发出信号停止加热。但这时发热棒或发热圈内部温度会高于400℃,发热棒、发热圈还将会对被加热器件进行加热,即使温度控制器发出信号停止加热,被加热器件温度还往往继续上升几度,然后才开始下降。当下降到设定温度下限时,温度控制器又开始发出加热信号,开始加热,但发热丝要把温度传递到被加热器件需要一定时候,这就要视乎发热丝与被加热器件之间介质情
况而定。通常开始重新加热时,温度继续下降几度。所以,传统定点开关控制温度会有正负误差几度现象,但这不是温度控制器本身问题,而是整个热系统结构性问题,使温度控制器控温产生一种惯性温度误差。 要解决温度控制器这个问题,采用PID模糊控制技术,是明智选择。PID模糊控制,是针对以上情况而制定、新温度控制方案,用先进数码技术通过Pvar、Ivar、Dvar三方面结合调整,形成一个模糊控制,来解决惯性温度误差问题。然而,在很多情况下,由于传统温度控制器温控方式存在较大惯性温度误差,往往在要求精确温控时,很多人会放弃自动控制而采用调压器来代替温度控制器。当然,在电压稳定工作速度不变、外界气温不变和空气流动速度不变情况下,这样做是完全可以,但要清楚地知道,以上环境因素是不断改变,同时,用调压器来代替温度控制器时,必须在很大程度上*人力调节,随着工作环境变化而用人手调好所需温度度数,然后*相对稳定电压来通电加热,勉强运作,但这决不是自动控温。当需要控温关键很多时,就会手忙脚乱。这样,调压器就派不上用场,因为*人手不能同时调节那么多需要温控关键,只有采用PID模糊控制技术,才能解决这个问题,使操作得心应手,运行畅顺。例如烫金机,其温度要求比较稳定,通常在正负2℃以内才能较好运作。高速烫金机烫制同一种产品图案时,随着速度加快,加热速度也要相应提高。这时,传统温度控制器方式和采用调压器操作就不能胜任,产品质量就不能保证,因为烫金之前必须要把烫金机运转速度调节适当,用速度来迁就温度控制器和调压器弱点。但是,如果采用PID模
温度PID 控制实验 一、实验目的 1.加深对PID 控制理论的理解; 2.认识Labview 虚拟仪器在测控电路的应用; 3.掌握时间比例P、积分I、微分D 对测控过程连续测控的影响以及提高测控系统的精度; 4.通过实验,改变P、I、D 参数,观察对整个温度测控系统的影响; 5.认识固态继电器和温度变送器,了解其工作原理。 二、预习要点 1.PID 控制理论与传递函数。请学生在0-100 的范围里,自己选择较好的KP,KI,KD 值,用该控制参数进行后续实验; 2.了解A/D、D/A 转换原理; 3.Labview 虚拟仪器图形软件(本实验指导书附录中对使用环境详细介绍)。 三、实验原理 温度是通过固态继电器的导通关断来实现加热的,控制周期即是一个加热和 冷却周期,PID 调节的实现也是通过这个周期实现的,在远离温度预设值的时固 态继电器在温度控制周期中持续加热(假设导通时间是T),在接近温度预设值 时通过PID 得到的值来控制这一周期内固态继电器的开关时间(假设导通时间是 1/2T)维持温度(假设导通时间是1/4T)。如图1 所示: 图1 加热周期控制示意图 8 四、实验项目 1.用PID 控制水箱温度; 2.用控制效果对比完成数据对比操作,选出最佳值。 五、实验仪器 ZCK-II 型智能化测控系统。 六、实验步骤及操作说明 1.打开仪器面板上的总电源开关,绿色指示灯亮起表示系统正常;
2.打开仪器面板上的液位电源开关,绿色指示灯亮起表示系统正常; 3,确保贮水箱内有足够的水,参照图2 中阀门位置设置阀门开关,将阀门1、3、5、6 打开,阀门2、4 关闭; 图2 水箱及管道系统图 4.参看变频器操作说明书将其设置在手动操作挡; 5.单击控制器RUN 按钮,向加热水箱注水,直到水位接近加热水箱顶部,完 全 淹没加热器后单击STOP 按钮结束注水; 6.关闭仪器面板上的液位电源开关,红色指示灯亮起表示系统关闭; 7.打开仪器面板上的加热电源开关,绿色指示灯亮起表示系统正常; 8.打开计算机,启动ZCK-II 型智能化测控系统主程序; 9.用鼠标单击温度控制动画图形进入温度控制系统主界面,小组实验无须在个 人信息输入框填写身份,直接确定即可; 10.在温度系统控制主界面中,单击采集卡测试图标,进入数据采集卡测试程序。 请在该选项中确定选择设备号为端口1,因为我们接入数据采集卡的端口是1 号 9 端口,其他数据端口留做其他方面使用的,所以切记不能选错,否则程序会报 错 并强制关闭。选择采集通道时请选择0 号通道即温度传感器占用的通道。控制上、 下限选项是为设置报警电路所预设的,在本实验中暂未起用该功能,感兴趣的 同 学可以试着完善它,本实验报警数值是+1V 以下和+5V 以上,这里只做了解即可。 采样点数(单位:个)、采样速率(单位:个/秒)和控制周期(单位:毫秒) 请 参照帮助显示区进行操作,一切设置确认无误后即可单击启动程序图标,观察 温 度和电压的变化,也可以单击冷却中左边的开关按钮进入加热程序,观察温度 上 升曲线及电流表和电压表变化,确认传感器正常工作后点击程序结束,等待返 回 主界面图标出现即可返回温度控制主界面进入下一步实验。 11.在温度系统控制主界面中,单击传感器标定图标,进入传感器标定程序。 本 程序界面和数据采集卡测试程序界面基本相同,操作请参照步骤10 进行,一切 设置确认无误后即可单击启动程序图标,观察温度和电压的变化,同时用温度
PID温度控制的PLC程序设计(梯形图语言) PID温度控制的PLC程序设计 温度控制是许多机器的重要的构成部分。它的功能是将温度控制在所需要的温度范围内,然后进行工件的加工与处理。PID控制系统是得到广泛应用的控制方法之一。在本文中,将详细讲叙本套系统。 l 系统组成 本套系统采用Omron的PLC与其温控单元以及Pro-face的触摸屏所组成。系统包括CQM1H-51、扩展单元TC-101、GP577R以及探温器、加热/制冷单元。 l 触摸屏画面部分(见图1-a) 1-a 如图所见,数据监控栏内所显示的002代表现在的温度,而102表示输出的温度。如按下开始设置就可设置参数。需要设置的参数有六个,分别是比例带、积分时间、微分时间、滞后值、控制周期、偏移量。它们在PLC的地址与一些开关的地址如下所列。 比例带: DM51 积分时间: DM52 微分时间: DM53 滞后值: DM54 控制周期: DM55 偏移量: DM56 数据刷新: 22905 l PLC程序部分 002:PID的输入字 102:PID的输出字 [NETWORK] Name="Action Check" //常规检查 [STATEMENTLIST] LD //常ON OUT TR0 CMP 002 #FFFF //确定温控单元是否完成初始化 字串1 AND NOT //等于 OUT //初始化完成 LD TR0 AND OUT TR1 AND NOT //不在参数设置状态 MOV DM0050 102 //将设置温度DM50传送给PID输出字 LD TR1 MOV 002 DM0057 //将002传送到DM57
PID温度控制的PLC程序设计 温度控制是许多机器的重要的构成部分。它的功能是将温度控制在所需要的温度范围内,然后进行工件的加工与处理。PID控制系统是得到广泛应用的控制方法之一。在本文中,将详细讲叙本套系统。 l 系统组成 本套系统采用Omron的PLC与其温控单元以及Pro-face的触摸屏所组成。系统包括CQM1H-51、扩展单元TC-101、GP577R以及探温器、加热/制冷单元。 l 触摸屏画面部分(见图1-a) 1-a 如图所见,数据监控栏内所显示的002代表现在的温度,而102表示输出的温度。如按下开始设置就可设置参数。需要设置的参数有六个,分别是比例带、积分时间、微分时间、滞后值、控制周期、偏移量。它们在PLC的地址与一些开关的地址如下所列。 比例带: DM51 积分时间: DM52 微分时间: DM53 滞后值: DM54 控制周期: DM55 偏移量: DM56 数据刷新: 22905 l PLC程序部分 002:PID的输入字 102:PID的输出字 [NETWORK] Name="Action Check" //常规检查 [STA TEMENTLIST] LD 253.13 //常ON OUT TR0 CMP 002 #FFFF //确定温控单元是否完成初始化 AND NOT 255.06 //等于 OUT 041.15 //初始化完成 LD TR0 AND 041.15 OUT TR1 AND NOT 040.10 //不在参数设置状态 MOV DM0050 102 //将设置温度DM50传送给PID输出字 LD TR1 MOV 002 DM0057 //将002传送到DM57 [NETWORK] Name="Setting Start"//设置开始 [STA TEMENTLIST] LD 253.13 OUT TR0 AND 229.05 //触摸屏上的开始设置开关
P I D温度控制的P L C 程序设计(梯形图语言)
PID温度控制的PLC程序设计(梯形图语言) PID温度控制的PLC程序设计 温度控制是许多机器的重要的构成部分。它的功能是将温度控制在所需要的温度范围内,然后进行工件的加工与处理。PID控制系统是得到广泛应用的控制方法之一。在本文中,将详细讲叙本套系统。 l 系统组成 本套系统采用Omron的PLC与其温控单元以及Pro-face的触摸屏所组成。系统包括CQM1H-51、扩展单元TC-101、GP577R以及探温器、加热/制冷单元。 l 触摸屏画面部分(见图1-a) 1-a 如图所见,数据监控栏内所显示的002代表现在的温度,而102表示输出的温度。如按下开始设置就可设置参数。需要设置的参数有六个,分别是比例带、积分时间、微分时间、滞后值、控制周期、偏移量。它们在PLC的地址与一些开关的地址如下所列。 比例带 : DM51 积分时间 : DM52 微分时间 : DM53 滞后值 : DM54 控制周期 : DM55 偏移量 : DM56 数据刷新 : 22905
l PLC程序部分 002:PID的输入字 102:PID的输出字 [NETWORK] Name="Action Check" //常规检查 [STATEMENTLIST] LD 253.13 //常ON OUT TR0 CMP 002 #FFFF //确定温控单元是否完成初始化 字串1 AND NOT 255.06 //等于 OUT 041.15 //初始化完成 LD TR0 AND 041.15 OUT TR1 AND NOT 040.10 //不在参数设置状态 MOV DM0050 102 //将设置温度DM50传送给PID输出字 LD TR1 MOV 002 DM0057 //将002传送到DM57 [NETWORK] Name="Setting Start"//设置开始 [STATEMENTLIST] LD 253.13 OUT TR0 AND 229.05 //触摸屏上的开始设置开关 DIFU 080.05 //设置微分
一、前言 能源问题已经是当前最为热门的话题,离开能源的日子,世界将失去一切颜色,人们将寸步难行,我们知道虽然电能是可再生能源,但是在今天还是有很多的电能是依靠火力,核电等一系列不可再生的自然资源所产生,一旦这些自然资源耗尽,我们将面临电能资源的巨大的缺口,因而本设计从开源节流的角度出发,节省电能,保护环境。 本设计任务和主要内容: 设计并制作一个水温自动控制系统,控制对象为 1 升净水,容器为搪瓷或塑料器皿。水温可以在一定范围内由人工设定,并能在环境温度降低时实现自动控制,以保持设定的温度基本不变。 本设计主要内容如下: (1)温度设定范围为:40~90℃,最小区分度为 1℃,标定温度≤1℃。 (2)环境温度降低时温度控制的静态误差≤1℃。 (3)用1602液晶显示水的实际温度。 (4)采用适当的控制方法,当设定温度突变(由40℃提高到60℃)时,减小系统的调节时间和超调量。 (5)温度控制的静态误差≤0.5℃。 二、系统方案 1、温度传感器的选取 目前市场上温度传感器较多,主要有以下几种方案: 方案一:选用铂电阻温度传感器。此类温度传感器线性度、稳定性等方面性能都很好,但其成本较高。 方案二:采用热敏电阻。选用此类元器件有价格便宜的优点,但由于热敏电阻的非线性特性会影响系统的精度。 方案三:采用DS18B20温度传感器。DS18B20是DALLAS公司生产的一线式数字温度传感器,具有3引脚TO-92小体积封装形式;温度测量范围为-55℃~+125℃,可编程为9位~12位A/D转换精度,测温分辨率可达0.0625℃,被测温度用符号扩展的16位数字量方式串行输出远端引入。此器件具有体积小、质量轻、线形度好、性能稳定等优点其各方面特性都满足此系统的设计要求。 比较以上三种方案,方案三具有明显的优点,因此选用方案三。 2、键盘显示部分 控制与显示电路是反映电路性能、外观的最直观部分,所以此部分电路设计的好坏直接影响到电路的好坏。 方案一:采用可编程控制器8279与数码管及地址译码器74LS138组成,可编程/显示器件8279实现对按键的扫描、消除抖动、提供LED的显示信号,并对LED显示控制。用8279和键盘组成的人机控制平台,能够方便的进行控制单片机的输出。 方案二:采用单片机AT89C52与4X4矩阵组成控制和扫描系统,并用89C52的P1口对键盘进行扫描,并用总线的方式在P0口接1602液晶来显示水温和设定值,这种方案既能很好的控制键盘及显示,又为主单片机大大的减少了程序的
我的题目是:基于PID算法的温度控制系统 89C51单片机,通过键盘输入预设值,与DS18B20测得的实际值做比较,然后驱动制冷或加热电路。用keil C语言来实现PID的控制。 最佳答案 7f0f2f1c2f
89C 89C89C1 L50℃3℃2006-02-17 2009-04-23 2009-04-23 2009-04-24 2009-04-24
2009-10-11 超低温漂移高精度运算放大器0P07将温度一电压信号进行放大,便于A/D进行转换,以提高温度采集电路的可靠性。模拟电路硬件部分见图2。 图2 ?温度电压转换电路 电控制执行电路的设计 ??? 由输出来控制电炉,电炉可以近似建立为具有滞后性质的一阶惯性环节数学模型。其传递函数形式为: ??? 可控硅可以认为是线形环节实现对水温的控制。单片机输出与电炉功率分别属于弱电与强电部分,需要进行隔离处理,这里采用光耦元件TLP521 在控制部分进行光电隔离,此外采用变压器隔离实现弱强电的电源隔离。 ??? 单片机PWM 输出电平为0 时,光耦元件导通,从而使三极管形成有效偏置而导通,通过整流桥的电压经过集电极电阻以及射集反向偏压,有7V 左右的电压加在双向可控硅控制端,从而使可控硅导通,交流通路形成,电阻炉工作;反之单片机输出电平为0 时,光耦元件不能导通,三极管不能形成有效偏置而截止,可控硅控制端电压几乎为零,可控硅截止从而截断交流通路,电炉停止工作。此外,还有越限报警,当温度低于下限时发光二极管亮;高上限时蜂鸣器叫。控制执行部分的硬件电路如下: 图3? 控制执行部分电路 3 键盘及显示的设计 ??? 键盘采用软件查询和外部中断相结合的方法来,低电平有效。图3 中按键AN1,AN2,AN3,AN4, AN5的功能定义如表1所示。 ??? 按键AN3与相连,采用外部中断方式,并且优先级定为最高;按键AN5和AN4分别与和相连,采用软件查询的方式;AN1则为硬件复位键,与R、C构成复位电路。
温度控制与PID算法 下面的叙述以波峰焊及回流焊加热温区的温度控制为实例,简单地结合控制理论,以浅显的方式,将温度控制及PID算法作一个简单的描述。 1.温度控制的框图 这是一个典型的闭环控制系统,用于控制加热温区的温度(PV)保持在恒定的温度设定值(SV)。系统通过温度采集单元反馈回来的实时温度信号(PV)获取偏差值(EV),偏差值经过PID调节器运算输出,控制发热管的发热功率,以克服偏差,促使偏差趋近于零。例如,当某一时刻炉内过PCB板较多,带走的热量较多时,即导致温区温度下降,这时,通过反馈的调节作用,将使温度迅速回升。其调节过程如下: 温度控制的功率输出采用脉宽调制的方法。固态继电器SSR的输出端为脉宽可调的电压U OUT 。当SSR的触发角触发时,电源电压U AN通过SSR的输出端加到发热管的两端;当SSR的触发角没有触发信号时,SSR关断。因此,发热管两端的平均电压为U d=(t/T)* U AN=K* U AN 其中K=t/T,为一个周期T中,SSR触发导通的比率,称为负载电压系数或是占空比,K 的变化率在0-1之间。一般是周期T固定不便,调节t, 当t在0-T的范围内变化时,发热管的电压即在0-U AN之间变化,这种调节方法称为定频调宽法。下面将要描述的PID 调节器的算式在这里的实质即是运算求出一个实时变化的,能够保证加热温区在外界干扰的情况下仍能保持温度在一个较小的范围内变化的合理的负载电压系数K。
2.温度控制的两个阶段 温度控制系统是一个惯性较大的系统,也就是说,当给温区开始加热之后,并不能立即观察得到温区温度的明显上升;同样的,当关闭加热之后,温区的温度仍然有一定程度的上升。另外,热电偶对温度的检测,与实际的温区温度相比较,也存在一定的滞后效应。这给温度的控制带来了困难。因此,如果在温度检测值(PV)到达设定值时才关断输出,可能因温度的滞后效应而长时间超出设定值,需要较长时间才能回到设定值;如果在温度检测值(PV)未到设定值时即关断输出,则可能因关断较早而导致温度难以达到设定值。为了合理地处理系统响应速度(即加热速度)与系统稳定性之间地矛盾,我们把温度控制分为两个阶段。 (1)PID调节前阶段 在这个阶段,因为温区的温度距离设定值还很远,为了加快加热速度,SSR与发热管处于满负荷输出状态,只有当温度上升速度超过控制参数“加速速率”,SSR 才关闭输出。“加速速率”描述的是温度在单位时间的跨度,反映的是温度升降的快慢,如上图所示。用“加速速率”限制温升过快,是为了降低温度进入PID调节区的惯性,避免首次到达温度设定值(SV)时超调过大。 在这个阶段,要么占空比K=0, SSR关闭;要么占空比K=100%, SSR全速输出。 PID调节器不起作用,仅由“加速速率”控制温升快慢。 (2)PID调节阶段 在这个阶段,PID调节器调节输出,根据偏差值计算占空比(0-100%),保证偏差(EV)趋近于零,即使系统受到外部干扰时,也能使系统回到平衡状态。
温度的PID 控制 一.温度检测部分首先要OK. 二、PID 调节作用 PID 控制时域的公式 1 de(t) y(t) Kp(e(t) e(t) Td ) Ti dt 分解开来: (1) 比例调节器 y(t) = Kp * e(t) e(k) 为当前的温差(设定值与检测值的插值) y(k) 为当前输出的控制信号(需要转化为PWM 形式) # 输出与输入偏差成正比。只要偏差出现,就能及时地产生与之成比例的调节 作用,使被控量朝着减小偏差的方向变化,具有调节及时的特点。但是,Kp 过 大会导致动态品质变坏,甚至使系统不稳定。比例调节器的特性曲线. (2) 积分调节器 y(t) = Ki * ∫(e(t))dt Ki = Kp/Ti Ti为积分时间 #TI 是积分时间常数,它表示积分速度的大小,Ti 越大,积分速度越慢,积分作用越弱。只要偏差不为零就会产生对应的控制量并依此影响被控量。增大Ti 会减小积分作用,即减慢消除静差的过程,减小超调,提高稳定性。 (3) 微分调节器 y(t) = Kd*d(e(t))/dt Kd = Kp*Td Td 为微分时间 #微分分量对偏差的任何变化都会产生控制作用,以调整系统输出,阻止偏差变化。偏差变化越快,则产生的阻止作用越大。从分析看出,微分作用的特点是:加入微分调节将有助于减小超调量,克服震荡,使系统趋于稳定。他加快了系统的动作速度,减小调整的时间,从而改善了系统的动态性能。 三.PID 算法:由时域的公式离散化后可得如下公式:
y(k) = y(k-1)+(Kp+Ki+Kd)*e(k)-(Kp +2*Kd)*e(k-1) + Kd*e(k-2) y(k) 为当前输出的控制信号(需要转化为PWM 形式) y(k-1)为前一次输出的控制信号 e(k) 为当前的温差(设定值与检测值的插值) e(k-1) 为一次前的温差 e(k-2) 为二次前的温差 Kp 为比例系数 Ki = Kp*T/Ti T 为采样周期 Kd = Kp*Td/T 四.PID 参数整定(确定Kp,Ts,Ti,Td ):温度控制适合衰减曲线法,需要根据多次采样的数据画出响应曲线。所以需要通过串口将采样时间t, 输出y(t) 记录下来,方便分析。 1) 、不加入算法,系统全速加热,从常温加热到较高的温度的时间为Tk, 则采样时间一般设为T = Tk/10 。 2) 、置调节器积分时间TI= ∞,微分时间TD=0,即只加比例算法: y(k) = y(k-1)+Kp*e(k) 比例带δ置于较大的值。将系统投入运行。 (δ = 1/Kp ) 3) 、待系统工作稳定后,对设定值作阶跃扰动,然后观察系统的响应。若响应振荡衰减太快,就减小比例带;反之,则增大比例带。如此反复,直到出现如图所示的衰减比为4:1的振荡过程时,记录此时的δ值(设为δS),以及TS 的值(如图中所示)。当采用衰减比为10:1振荡过程时,应用上升时间Tr 替代 振荡周期TS 计算。 系统衰减振荡曲线图中,TS为衰减振荡周期,Tr 为响应上升时间。据表中所给的经验公式计算δ、TI 及TD的参数。 表衰减曲线法整定计算公式
基于PID的恒温箱温度控制系统设计 (2008届) 2008年6月 摘要 本设计是恒温箱温度控制系统设计。可供各类实验室、医疗机构、食品加工、生产部门等使用。在周围温度不断变化条件下,使用恒温箱,可以使一定范围的温度恒定在特定温度下,从而适应生活和工作。控制的温度范围为50—1200C。恒温箱可以在线设定温度,并对温度进行实时数码显示。
设计内容包括硬件和软件两个部分。硬件主要由AT89S52单片机、DS18B20数字温度传感器、8155片外存储器、继电器,LED数码管和报警器等组成。电原理图包括数据采集、温度显示、键盘设定、温度控制和复位电路等几个模块。软件部分主要对PID算法进行了数学建模和编程。 本设计由键盘电路输入设定温度信号给单片机,温度信号采集电路采集现场温度信号给单片机,单片机根据输入与反馈信号的偏差进行PID计算,输出控制信号给加温控制电路,实现加温和停止。当实际温度比设定温度大2摄氏度以上时,则清P1.3输出口,从而停止对电阻丝的加热。当实际温度比设定温度小2摄氏度以上时,取PID的最大值,实现全功率输出。在它们之间时,实现PID 算法控制,控制可控硅的接触时间,调节电阻丝功率。显示电路实现现场温度的实时监控。 软件部分,采用PID控制和时间最优控制相结合的控制方案,实现了控制速度快、超调小、线性控制精度高和实现成本低等的优点。硬件部分采用单片机来实现温度控制,不仅具有控制方便、简单、灵活等优点,而且可以大幅度的提高被控温度的技术指标,从而大大提高产品的质量。 关键词:恒温控制,单片机,数字PID算法 ABSTRACT The system of this design is the temperature controller of a constant temperature box.Can be provided as each kind of laboratory, medical treatment organization, food processing and produce the section etc. usage.Under the condition that the surroundings temperature continuously change, the usage constant temperature box, can make the temperature maintaining of the certain scope settle under the particular temperature, thus adapt the life and works.The temperature scope of the control is 50-120, The constant temperature box can with on-line enactment temperature, and carry on the solid hour to the temperature figures manifestation.When be placed in to set the appearance, figures tube manifestation enactment temperature,
基于PID 电加热炉温度控制系统设计 1概述 电加热炉随着科学技术的发展和工业生产水平的提高,已经在冶金、化工、 机械等各类工业控制中得到了广泛应用,并且在国民经济中占有举足轻重的地 位。对于这样一个具有非线性、大滞后、大惯性、时变性、升温单向性等特点的 控制对象,很难用数学方法建立精确的数学模型,因此用传统的控制理论和方法 很难达到好的控制效果。 单片机以其高可靠性、高性能价格比、控制方便简单和灵活性大等优点,在 工业控制系统、智能化仪器仪表等诸多领域得到广泛应用。采用单片机进行炉温 控制,可以提高控制质量和自动化水平。 在本控制对象电阻加热炉功率为800W ,由220V 交流电供电,采用双向可 控硅进行控制。本设计针对一个温度区进行温度控制,要求控制温度范围 50~350C ,保温阶段温度控制精度为正负1度。选择合适的传感器,计算机输出 信号经转换后通过双向可控硅控制器控制加热电阻两端的电压。其对象问温控数 学模型为: 1 )(+=-s T e K s G d s d τ 其中:时间常数Td=350秒 放大系数Kd=50 滞后时间τ=10秒 控制算法选用改PID 控制
2系统硬件的设计 本系统的单片机炉温控制系统结构主要由单片机控制器、可控硅输出部分、 热电偶传感器、温度变送器以及被控对象组成。 系统硬件结构框图如下: 图2-1 系统硬件结构框图 看门狗 报警提醒 通信接口 LED 显示 键盘 微 型 控 制 机 AT89S52 温度检测PT100 驱动执行机构 8路D/A 转换器DAC0832 测量变送 8路A/D 转换器ADC0809 加热电阻 温度
PID 温度控制的实现 PID 简介 PID(Proportional Integral Derivative)控制是控制工程中技术成熟、应用广泛的一种控制策略,经过长期的工程实践,已形成了一套完整的控制方法和典型的结构。它不仅适用于数学模型已知的控制系统中,而且对于大多数数学模型难以确定的工业过程也可应用,在众多工业过程控制中取得了满意的应用效果。 PID 工作基理:由于来自外界的各种扰动不断产生,要想达到现场控制对象值保持恒定的目的,控制作用就必须不断的进行。若扰动出现使得现场控制对象值(以下简称被控参数)发生变化,现场检测元件就会将这种变化采集后经变送器送至PID 控制器的输入端,并与其给定值(以下简称SP 值)进行比较得到偏差值(以下简称e 值),调节器按此偏差并以我们预先设定的整定参数控制规律发出控制信号,去改变调节器的开度,使调节器的开度增加或减少,从而使现场控制对象值发生改变,并趋向于给定值(SP 值),以达到控制目的,如图1 所示,其实PID 的实质就是对偏差(e 值)进行比例、积分、微分运算,根据运算结果控制执行部件的过程。 图1 模拟PID 控制系统原理图 PID 控制器的控制规律可以描述为: (1) 比例(P)控制能迅速反应误差,从而减小稳态误差。但是,比例控制不能消除稳态误差。比例放大系数的加大,会引起系统的不稳定。积分(I)控制的作用是:只要系统有误差存在,积分控制器就不断地积累,输出控制量,以消除误差。因而,只要有足够的时间,积分控制将能完全消除误差,使系统误差为零,从而消除稳态误差。积分作用太强会使系统超调加大,甚至使系统出现振荡。微分(D)控制可以减小超调量,克服振荡,使系统的稳定性提高,同时加快系统的动态响应速度,减小调整时间,从而改善系统的动态性能。根据不同的被控对象的控制特性,又可以分为P、PI、PD、PID 等不同的控制模型。 数字PID 的实现 在连续-时间控制系统(模拟PID 控制系统)中,PID 控制器应用得非常广泛。其设计技术成熟,长期以来形成了典型的结构,参数整定方便,结构更改灵活,能满足一般的控制要求。随着计算机的快速发展,人们将计算机引入到PID 控制领域,也就出现了数字式PID 控制。 由于计算机基于采样控制理论,计算方法也不能沿袭传统的模拟PID 控制算法(如公式1 所示),所以必须将控制模型离散化,离散化的方法:以T 为采样周期,k 为采样序号,用求和的形式代替积分,用增量的形式(求差)代替微分,这样可以将连续的PID 计算公式离散: (2) 式1 就可以离散为: