实验四 线性系统的根轨迹分析
- 格式:pdf
- 大小:345.05 KB
- 文档页数:5
自动控制原理MATLAB仿真实验(于海春)实验一典型环节的MATLAB仿真一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK 的使用MATLAB中SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK功能模块可以快速的建立控制系统的模型,进行仿真和调试。
1.运行MATLAB软件,在命令窗口栏“>>”提示符下键入imulink命令,按Enter键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK仿真环境下。
2.选择File菜单下New下的Model命令,新建一个imulink仿真环境常规模板。
图1-1SIMULINK仿真界面图1-2系统方框图3.在imulink仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击imulink下的“Continuou”,再将右边窗口中“TranferFen”的图标用左键拖至新建的“untitled”窗口。
2)改变模块参数。
在imulink仿真环境“untitled”窗口中双击该图标,即可改变传递函数。
其中方括号内的数字分别为传递函数的分子、分母各次幂由高到低的系数,数字之间用空格隔开;设置完成后,选择OK,即完成该模块的设置。
3)建立其它传递函数模块。
按照上述方法,在不同的imulink的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math”右边窗口“Gain”的图标。
4)选取阶跃信号输入函数。
用鼠标点击imulink下的“Source”,将右边窗口中“Step”图标用左键拖至新建的“untitled”窗口,形成一个阶跃函数输入模块。
5)选择输出方式。
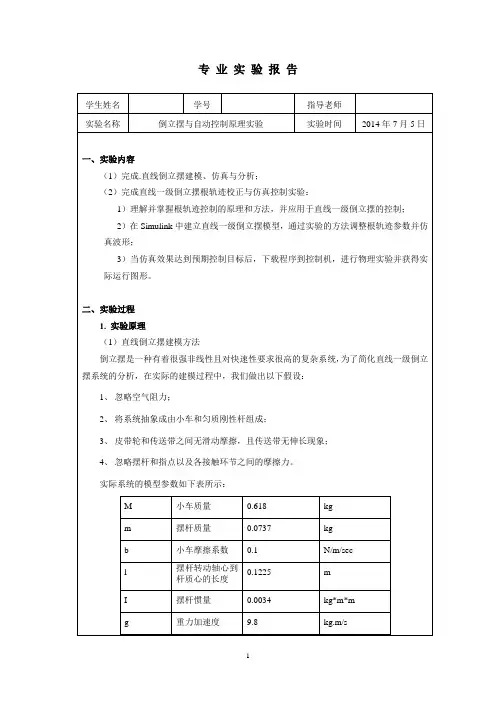
专业实验报告学生姓名学号指导老师实验名称倒立摆与自动控制原理实验实验时间2014年7月5日一、实验内容(1)完成.直线倒立摆建模、仿真与分析;(2)完成直线一级倒立摆根轨迹校正与仿真控制实验:1)理解并掌握根轨迹控制的原理和方法,并应用于直线一级倒立摆的控制;2)在Simulink中建立直线一级倒立摆模型,通过实验的方法调整根轨迹参数并仿真波形;3)当仿真效果达到预期控制目标后,下载程序到控制机,进行物理实验并获得实际运行图形。
二、实验过程1. 实验原理(1)直线倒立摆建模方法倒立摆是一种有着很强非线性且对快速性要求很高的复杂系统,为了简化直线一级倒立摆系统的分析,在实际的建模过程中,我们做出以下假设:1、忽略空气阻力;2、将系统抽象成由小车和匀质刚性杆组成;3、皮带轮和传送带之间无滑动摩擦,且传送带无伸长现象;4、忽略摆杆和指点以及各接触环节之间的摩擦力。
实际系统的模型参数如下表所示:M 小车质量0.618 kgm 摆杆质量0.0737 kgb 小车摩擦系数0.1 N/m/sec0.1225 ml 摆杆转动轴心到杆质心的长度I 摆杆惯量0.0034 kg*m*mg 重力加速度9.8 kg.m/s(2)直线一级倒立摆根轨迹校正控制原理基于根轨迹法校正的基本思想是:假设系统的动态性能指标可由靠近虚轴的一对共轭闭环主导极点来表征,因此,可把对系统提出的时域性能指标的要求转化为一对期望闭环主导极点。
确定这对闭环主导极点的位置后,首先根据绘制根轨迹的相角条件判断一下它们是否位于校正前系统的根轨迹上。
如果这对闭环主导极点正好落在校正前系统的根轨迹上,则无需校正,只需调整系统的根轨迹增益即可;否则,可在系统中串联一个超前校正装置。
常见的校正器有超前校正、滞后校正以及超前滞后校正等。
2. 实验方法(1)直线倒立摆建模、仿真与分析利用牛顿-欧拉方法建立直线一级倒立摆系统的数学模型;依照根轨迹设计的步骤得到系统的控制器,利用MA TLAB Simulink中的工具进行仿真分析。
根轨迹是指在复平面上描述线性系统的特征根(或者特征值)随时间变化而形成的轨迹。
根轨迹的特点如下:
根轨迹是一个连续曲线,由系统的特征根在复平面上连续移动形成。
通常情况下,根轨迹是闭合的,也就是形成一个或多个闭合的环。
每个特征根对应于根轨迹上的一个点。
根轨迹与系统的传递函数有关,不同的传递函数对应不同的根轨迹。
因此,通过观察根轨迹,我们可以了解系统的稳定性、阻尼比、超调量等性能指标。
在根轨迹上,特征根距离原点越远,表示系统对外部扰动和输入信号的影响越强。
因此,从根轨迹中可以看出系统对不同频率的输入信号的响应情况。
根轨迹的形状受到系统阻尼比的影响。
当阻尼比越小时,根轨迹的形状越接近圆形;当阻尼比较大时,根轨迹的形状会变得扁平。
根轨迹上的点代表系统的特征根,在复平面上的位置反映了特征根的实部和虚部。
实部表示系统的稳态响应,虚部表示系统的振荡特性。
总之,根轨迹提供了一种可视化的方法来分析和设计线性系统。
通过观察根轨迹的形状和位置,我们可以判断系统的稳定性和性能,并进行系统控制的设计和调整。

根轨迹实轴重根-概述说明以及解释1.引言1.1 概述概述部分的内容可以按照以下方式进行编写:根轨迹、实轴和重根是控制系统理论中的重要概念。
在控制系统设计和分析中,根轨迹是一种图形工具,用以描述系统在不同参数下的稳定性和动态响应特性。
通过绘制根轨迹图,我们可以直观地了解系统的稳定性、振荡性以及对不同输入信号的响应能力。
而实轴则是复平面上的实数轴,它在根轨迹分析中具有重要的作用。
实轴上的点表示系统的特征根中的实部,而特征根则是指控制系统的传递函数分母多项式的根。
实轴上的点可以揭示系统在不同参数下的稳定性,特别是当特征根的实部为负数时,系统会趋向于稳定。
此外,重根也是一个值得关注的概念。
当控制系统的传递函数分母多项式中存在重根时,系统的动态响应会呈现出一些特殊的特征。
重根会导致系统的阶数减小,从而影响系统的性能指标和稳定性。
本文将深入探讨根轨迹、实轴和重根在控制系统中的定义、性质和影响。
在正文部分,将详细介绍根轨迹的概念,并探讨实轴在根轨迹分析中的重要作用。
同时,将讨论重根的特征以及其对系统动态性能和稳定性的影响。
最后,在结论部分,将总结根轨迹、实轴和重根在控制系统设计和分析中的重要性,并提出应对重根带来的挑战的策略。
通过本文的研究,读者将能够更深入地理解根轨迹、实轴和重根在控制系统中的意义,从而为系统的设计和优化提供更加准确和有效的指导。
同时,对于控制系统的稳定性分析和振荡特性评估,本文所提供的知识也将为工程师和研究人员提供有益的参考。
文章结构部分的内容可以如下所示:1.2 文章结构本文将分为三个主要部分来讨论根轨迹、实轴和重根的相关概念和性质。
第一部分是引言部分,我们将概述本文的主要内容和目的。
首先我们将介绍根轨迹的定义和概念,以及其在系统稳定性分析中的作用。
接着我们将探讨实轴的性质和其对系统稳定性的影响。
最后,我们将介绍重根的特征和其对系统的影响。
第二部分是正文部分,主要包括三个小节。
在第一个小节中,我们将详细讨论根轨迹的定义和概念,以及如何通过绘制根轨迹图来分析系统的稳定性。
线性系统的校正实验报告(滞后校正) (超前校正)超前校正:已知单位负反馈系统被控对象的传递函数为:()(1)(4)KG s S S S =++,使用根轨迹解析法对系统进行超前串联校正设计,使之满足: 1)阶跃响应的超调量%20%σ=2)阶跃响应的调节时间不超过4(0.02)s t s =∆=±一、基于根轨迹法的串联超前校正的校正原理:当系统的性能指标以时域形式提出时,通常用根轨迹法对系统进行校正。
基于根轨迹法校正的基本思想是:假设系统的动态性能指标可由靠近虚轴的一对共轭闭环主导极点来表征,因此,可把对系统提出的时域性能指标的要求转化为一对期望闭环主导极点。
确定这对闭环主导极点的位置后,首先根据绘制根轨迹的相角条件判断一下它们是否位于校正前系统的根轨迹上。
如果这对闭环主导极点正好落在校正前系统的根轨迹上,则无需校正,只需调整系统的根轨迹增益即可;否则,可在系统中串联一超前校正装置1()(1)1C aTsG s a Ts+=>+,通过引入新的开环零点z c =-1/aT 和新的开环极点p c =-1/T 来改变系统原根轨迹的走向,使校正后系统的根轨迹经过这对期望闭环主导极点。
二、超前校正装置及其特性:典型超前校正装置的传递函数可写为1()(0)1C aTs G s a Ts+=>+式中a 为分度系数,T 为时间常数其频率响应1()1C jaT G j jTs ωωω+=+幅频特性:()c A ω=相频特性:11122(1)()1a T tg aT tg T tg aT ωφωωωω----=-=+由于a>1,()φω始终大于0,即超前校正装置始终提供超前相角。
超前装置提供一个极点和一个零点三、校正过程1)做出校正前系统的根轨迹和阶跃响应,如下图MATLAB代码:num=[1];den=[1 5 4 0];G0=tf(num,den) figure(1);rlocus(G0);sys=feedback(G0,1);figure(2);t=0:0.01:30;step(sys,t)grid2)根据21%100%e πςςσ--=⨯,可算出0.4559ς=,考虑到非主导极点和零点对超调量的影响,取0.5ς=又因为0.02∆=时, 4.44.4s nt ςωσ==,可得 2.2, 1.1n ωσ==期望闭环极点的纵坐标为21d ωως=- 1.9053d ω= 综上可得系统的一对希望的闭环主导极点为:1,2 1.1 1.9n d s j ςωω=-±=-±3)根据求得的主导极点,计算超前校正网络在1s 处应提供的超前角:1()(atan(1.9/2.9)*180/pi+180-atan(1.9/0.1)*180/pi+180-atan(1.9/1.1)*180/pi)o G s ∠=-得1()246.3131o G s ∠=-1180()o G s φ=--∠可得:66.3131φ=把()c G s 的零点设置在期望极点的正下方,即 1.1c z =-,从期望极点向左作角60φ=的负实轴交点上,可求得 5.5c p =- 4)校正后系统的开环传递函数为( 1.1)()(1)(4)( 5.5)K s G s s s s s +=+++由根轨迹的幅值条件,求得系统工作于期望极点处的K 值为36.2。
实验一系统建模与转换一、实验目的1.了解MATLAB软件的基本特点和功能;2.掌握线性系统被控对象传递函数数学模型在MATLAB环境下的表示方法及转换;3.掌握多环节串联、并联、反馈连接时整体传递函数的求取方法;4.掌握在SIMULINK环境下系统结构图的形成方法及整体传递函数的求取方法;5.了解在MATLAB环境下求取系统的输出时域表达式的方法。
二、实验内容1.自确定2个传递函数,实现传递函数的录入和求取串联、并联、反馈连接时等效的整体传递函数。
要求分别采用有理多项式模型和零极点增益模型两种传递函数形式。
2.进行2例有理多项式模型和零极点增益模型间的转换。
3.在Siumlink环境下实现如下系统的传递函数的求取。
各环节传递函数自定。
三、实验报告要求1.写明实验目的和实验原理。
实验原理中简要说明求取传递函数 的途径和采用的语句或函数。
2.在实验过程和结果中,要求按项目写清楚自定的传递函数、画 出系统方框图,从屏幕上复制程序和运行结果,复制系统的 Simulink 方框图,打印报告或打印粘贴在报告上。
不方便打印 的同学,要求手动从屏幕上抄写和绘制。
3.简要写出实验心得和问题或建议。
实验二 线性系统的时域分析一、实验目的1.研究线性系统在典型输入信号作用下的暂态响应; 2.熟悉线性系统的暂态性能指标;3.研究二阶系统重要参数阻尼比ξ对系统动态性能的影响; 4.熟悉在MATLAB 下判断系统稳定性的方法; 5.熟悉在MATLAB 下求取稳态误差的方法。
二、实验内容1〃研究一阶系统对阶跃输入、脉冲输入、斜坡输入、自定义输入的响应及性能指标。
设一阶系统系统具体参数:12.01)(+=s s G 。
2〃研究二阶系统对阶跃输入、脉冲输入、斜坡输入、自定义输入的响应及性能指标。
设:单位反馈系统的:)12.0(s )(+=s Ks G 。
K 参数变化及变化方案自定。
①典型二阶系统在阶跃输入下,阻尼比或自然振荡频率改变对某1项性能指标的影响。
自动控制原理MATLAB仿真实验实验指导书电子信息工程教研室实验一典型环节的MA TLAB仿真一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK的使用MATLAB中SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK功能模块可以快速的建立控制系统的模型,进行仿真和调试。
1.运行MA TLAB软件,在命令窗口栏“>>”提示符下键入simulink命令,按Enter键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK仿真环境下。
2.选择File菜单下New下的Model命令,新建一个simulink仿真环境常规模板。
图1-1 SIMULINK仿真界面图1-2 系统方框图3.在simulink仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击simulink下的“Continuous”,再将右边窗口中“Transfer Fen”的图标用左键拖至新建的“untitled”窗口。
2)改变模块参数。
在simulink仿真环境“untitled”窗口中双击该图标,即可改变传递函数。
其中方括号内的数字分别为传递函数的分子、分母各次幂由高到低的系数,数字之间用空格隔开;设置完成后,选择OK,即完成该模块的设置。
3)建立其它传递函数模块。
按照上述方法,在不同的simulink的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math”右边窗口“Gain”的图标。
4)选取阶跃信号输入函数。
用鼠标点击simulink下的“Source”,将右边窗口中“Step”图标用左键拖至新建的“untitled”窗口,形成一个阶跃函数输入模块。