多媒体技术及其应用本栏目责任编辑:唐一东第5卷第28期(2009年10月)基于SIFT 的超分辨率图像配准及MATLAB 实现
康燕妮,黄欢,朱玉艳,来沛剑
(昆明理工大学信息工程与自动化学院,云南昆明650051)
摘要:在超分辨率图像重建中,针对精确到亚像素的图像配准,提出了基于MATLAB 和SIFT(scale invariant feature transform)的配准方法。讨论了基于特征匹配的尺度不变特征变换配准方法的基本原理,并给出了相关推导公式和算法;简单介绍了MATLAB 图像处理工具箱的功能;同时,以一个灰度图像为例,用MATLAB 语言实现了配准,并给出了相关程序及实验结果图像。实验结果表明:MATLAB 环境下的SIFT 图像配准难度小,速度快,配准点准确且易于实现。
关键词:SIFT ;超分辨率;配准;MATLAB
中图分类号:TP391文献标识码:A 文章编号:1009-3044(2009)28-8031-03
Super-resolution Image Registration Based on SIFT and its Realization with MATLAB
KANG Yan-ni,HUANG Huan,ZHU Yu-yan,LAI Pei-jian
(College of Information Engineering and Automatization,Kunming University of Science and Technology,Kunming 650051,China)
Abstract:In the super-resolution image reconstruction,an image registration method based on SIFT and MATLAB was proposed for sub-pixel image registration.Given the basic theory,formula and algorithm based on SIFT;introduce the image process toolbox on MAT -LAB in brief ;A gray image used as an example,program and registration image were showed.Experimental results show that the method find the correct matching point and easy to implement.
Key words:SIFT;super-resolution;registration;MATLAB
所谓超分辨率图像重建(SR)就是将一组低质量、低分辨率图像通过一定的技术方法来产生出高质量、高分率的图像,该方法在很多领域都有实际的使用价值,包括高清晰度电视,视频图像高分辨率打印,医学成像,航空及其卫星成像,遥感遥测,视频监控等等[1]。正因为如此,该技术近年来已成为国内外图像处理领域的热点课题之一,受到广泛的关注。配准的准确与否直接影响重建图像的效果,甚至导致算法最终无法实现,因此配准问题是超分辨率技术的基础,也是至关重要的一步。
MATLAB 代表“矩阵实验室”(matrix laboratory )[2],MATLAB7.0提供的图像处理函数,涵盖了图像处理的几乎所有的技术方法,是学习和研究图像处理的人员难得的宝贵资料和加工工具箱。MATLAB 对图像的处理功能主要集中在它的图像处理工具箱(Image Processing Toolbox)中,IPT 是由一系列支持图像处理操作的函数组成,可以进行诸如图像类型转换、各类图像的显示、图像的变换技术、几何操作、线性滤波和滤波器设计、图像分析与图像增强、二值图像操作以及形态学处理等图像处理操作等。
1SR 与普通图像配准的区别
在超分辨率图像重建中,由于运动估计的精度高低和正确与否直接决定着复原结果的好坏,为了取得更好的复原效果就要有更高的运动估计精度[3]。
所谓的运动估计也叫配准,就是求同一对象在两帧图像中的位置差,也就是这一对象在两帧图像间的相对位移。在超分辨率图像重建中就是要把低分辨率图像序列投影到参考帧上进行修正,为保证低分辨率图像中的点投影到参考帧中正确的位置上就必须进行运动估计,该运动估计就要求精确到亚像素的运动估计。精确到亚像素的运动估计是指运动矢量的精度到达低于单个像素的运动估计,亚像素是由整像素插值得到的。实现亚像素运动估计的方法是对当前帧和参考帧插值,以得到更高分辨率,然后在插值后的图像间做运动估计,得到运动矢量后再按照插值比例换算到原始图像中,最后得到的运动矢量就是精确到亚像素的运动矢量。
有此可知,超分辨率图像重建的配准过程比普通图像配准的要求更高,需要达到亚像素级的配准精度,因此,SR 图像的配准更复杂。
2图像配准原理
2.1配准模型
图像配准模型可以表述为求解两幅图像之间的变换函数问题。可以表达为:
I(x,y)=T(F(x,y))(1)
其中,I(x,y)是待配准图像,T(x,y)是模板图像[4]。如果反映到图像的坐标变换上,可表示为(x',y')=f(x,y),其中(x',y')为待配准图像I(x,y)中的坐标,(x,y)为模板图像T(x,y)的坐标。该函数是一种建立一幅图像与其变形后的图像中所有各点之间映射关系的函数,其目的就是要找到一个最佳的变换T ,使图像达到最大的一致。
进行图像配准需要事先对图像序列中的图像之间的变换关系及其相应的参数进行假设。图像变换是一种从整数集到实数集的映射。输入图像的采样点是均匀分布的,但是经映射后的输出图像的采样点不一定仍然是均匀分布的。图像配准的关键问题是图像收稿日期:2009-07-20
作者简介:康燕妮(1984-),女,山西临汾人,硕士,主要研究方向为图像处理。
ISSN 1009-3044Computer Knowledge and Technology
电脑知识与技术Vol.5,No.28,October 2009,pp.8031-8033E-mail:eduf@https://www.doczj.com/doc/e47902535.html, https://www.doczj.com/doc/e47902535.html, Tel:+86-551-569096356909648031
本栏目责任编辑:唐一东多媒体技术及其应用
Computer Knowledge and Technology电脑知识与技术第5卷第28期(2009年10月)
之间的空间变换或几何变换。几种最常用的变换模型为[5]:
1)刚性变换配准(rigid):刚性变换配准包括平移和旋转。
2)仿射变换配准(affine):仿射变换配准是将平行线变换为平行线。
3)投影变换配准(projection):投影变换配准是将直线映射为直线。
4)曲线变换配准(curve):曲线变换配准是将直线映射为曲线。
2.2匹配准则
对于给定的两个函数F(x+h)与G(x),该函数分别表示两幅图像中每个点x处的像素灰度值[6],它们之间的相似度量准则是:
1)L1准则:(2)
2)L2准则:(3)
3)负的归一化互相关:(4)
其中,h代表感兴趣区域的位移向量,h的取值决定了是否是相似性度量的最优解。
3SIFT匹配原理及实验过程
SIFT特征匹配算法是David G.Lowe1999年提出的[7],其全称是Scale Invariant Feature
Transform,即尺度不变特征变换,该特征是图形的局部特征,并对旋转,尺度缩放,亮度变化保持
不变性,对视角变化,仿射变换,噪声也保持一定程度的稳定性。SIFT特征匹配算法是目前国内
外特征点匹配研究领域的热点与难点[8],其匹配能力较强,甚至可以对任意角度拍摄的图像也
具备较为稳定的特征匹配能力。
SIFT算法首先在尺度空间进行特征检测,并确定关键点(Keypoints)的位置和关键点所处的
尺度,然后使用关键点邻域梯度的主方向作为该点的方向特征,以实现算子对尺度和方向的无
关性。
其主要匹配过程包括下面两个步骤:
3.1SIFT特征生成
该步骤是从多幅待匹配图像中提取出对尺度缩放、旋转、亮度变化无关的特征向量,为下
一步的配准做好准备。
3.1.1构建尺度空间,检测极值点
以初步确定关键点的位置和所在尺度,获得尺度不变性。所谓尺度空间是由一系列离散化
的不同分辨率的图像构成的,为了寻找尺度空间的极值点,尺度空间中中间层(最底层和最顶层
除外)每一个采样点要和它所有的相邻点比较,看其是否比他的图像域和尺度域的相邻点大或
者小。对于二维图像I(x,y),不同尺度下的尺度空间I(x,y,σ)可以表示为[9]:
I(x,y,σ)=G(x,y,σ)*I(x,y)(5)
其中G(x,y,σ)是尺度可变高斯核函数,(x,y)是空间坐标,σ是尺度坐标。
3.1.2特征点过滤并进行精确定位
即精确确定关键点的位置和尺度,在该过程中,要同时去除低对比度的特征点和不稳定的
边缘相应点,以增强匹配稳定性、提高抗噪声能力。
3.1.3特征点的方向值分配
利用关键点邻域像素的梯度方向分布特性为每个关键点指定方向参数,使算子具备旋转
不变性。
梯度模值:(6)
梯度方向:(7)
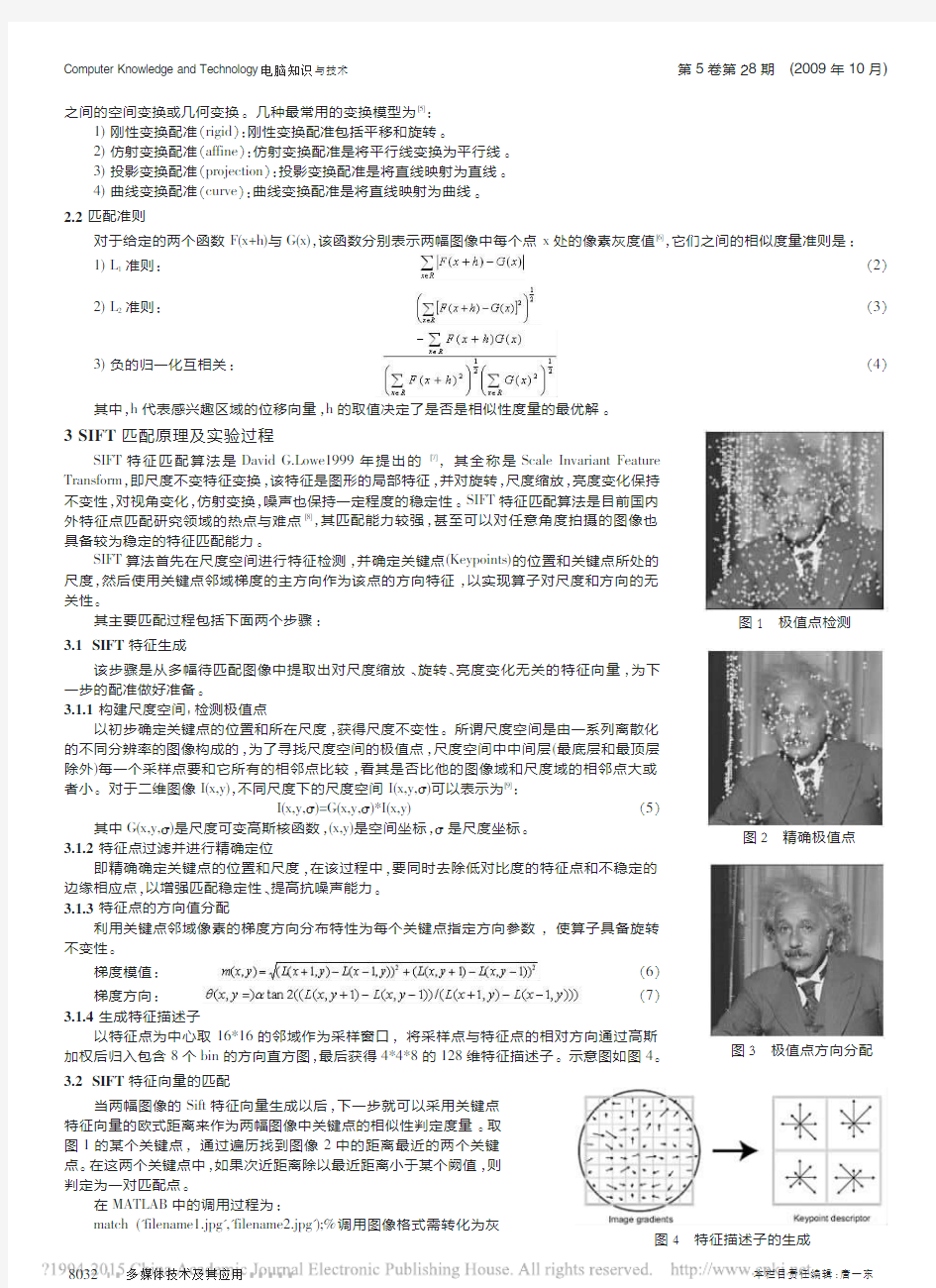
3.1.4生成特征描述子
以特征点为中心取16*16的邻域作为采样窗口,将采样点与特征点的相对方向通过高斯
加权后归入包含8个bin的方向直方图,最后获得4*4*8的128维特征描述子。示意图如图4。
3.2SIFT特征向量的匹配
当两幅图像的Sift特征向量生成以后,下一步就可以采用关键点
特征向量的欧式距离来作为两幅图像中关键点的相似性判定度量。取
图1的某个关键点,通过遍历找到图像2中的距离最近的两个关键
点。在这两个关键点中,如果次近距离除以最近距离小于某个阙值,则
判定为一对匹配点。
在MATLAB中的调用过程为:
match('filename1.jpg','filename2.jpg');%调用图像格式需转化为灰
图1极值点检测
图2精确极值点
图3极值点方向分配
图4特征描述子的生成
8032
多媒体技术及其应用本栏目责任编辑:唐一东第5卷第28期(2009年10月)
度图像。
运行结果1:(比例参数为0.6)
调用过程:match('book1gray.jpg','book2gray.jpg')
输出结果:
Finding keypoints...
394keypoints found.(第1幅图像中检测到394个特征点)
Finding keypoints...
488keypoints found.(第2幅图像中检测到488个特征点)
Found 82matches.
(找到了82个匹配点)ans =
82
运行结果2:(比例参数为0.5)
调用过程:match('book1gray.jpg','book2gray.jpg')
输出结果:Finding keypoints...
394keypoints found.
(第1幅图像中检测到394个特征点)Finding keypoints...
488keypoints found.(第2幅图像中检测到488个特征点)
Found 55matches.
(找到了55个匹配点)ans =
555结束语
图像配准是图像融合,图像镶嵌和变化检测特别是图像数据层
融合技术中需要先期解决的问题。本文探讨了MATLAB 环境下的图
像配准方法,利用MATLAB 软件中的图像处理工具对两幅图像进行
了配准,方法简单,实现容易。由以上结果可知,比例参数为0.5时找
到了55对配准点,比0.6更精确。多次仿真实验表明,选择合适的比
例阈值能提高图像配准的精度。
参考文献:
[1]袁小华,欧阳晓丽,夏德深.超分辨率图像恢复研究综述[J].地理与地理信息科学,2006.22(3):43-47.
[2]常学义,孙秋冬,任煜,等.基于MATLAB 的图像配准方法[J].上海:上海第二工业大学学报,2006.23(4):303-308.
[3]梁音.数字图像超分辨率技术研究[D].湖北:华中科技大学,2004.
[4]张燕.面向超分辨率重建的图像配准方法研究[D].大连:大连海事大学,2008.
[5]周峡.图像超分辨率重建中的配准算法研究[D].江苏:南京理工大学,2008.
[6]李玲玲,李翠华,曾晓明,等.基于Harris-affine 和Sift 特征匹配的图像自动配准[J].华中科技大学学报:自然科学版,2008.36(8):13-
16.
[7]David G.Distinctive image features from scale-invariant keypoints [J].International Journal of Computer Vision,2004,60(2):91-110.
[8]刘小军,杨杰,孙坚伟,等.基于SIFT 的图像配准方法[J].红外与激光工程,2008,37(1):156-160.
[9]赵辉.SIFT 特征匹配技术讲义[EB/OL]https://www.doczj.com/doc/e47902535.html,.
图5配准图像1图6配准图像2
图7配准后的图像1
图8配准后的图像2
8033
基于MATLAB的图像复原 摘要 随着信息技术的发展,数字图像像已经充斥着人们身边的任意一个角落。由于图像的传送、转换,或者其他原因,可能会造成图像的降质、模糊、变形、质量下降、失真或者其他情况的图像的受损。本设计就针对“图像受损”的问题,在MATLAB环境中实现了利用几何失真校正方法来恢复被损坏的图像。几何失真校正要处理的则是在处理的过程,由于成像系统的非线性,成像后的图像与原图像相比,会产生比例失调,甚至扭曲的图像。 图像复原从理论到实际的操作的实现,不仅能改善图片的视觉效果和保真程度,还有利于后续的图片处理,这对医疗摄像、文物复原、视频监控等领域都具有很重要的意义。 关键字:图像复原;MATLAB;几何失真校正
目录 摘要 (1) 1 MATLAB 6.x 信号处理 (1) 2 图像复原的方法及其应用 (13) 2.1 图像复原的方法 (13) 2.2 图像复原的应用 (14) 3 几何失真校正实现 (15) 3.1 空间变换 (15) 3.1.1 已知()y x r,和()y x s,条件下的几何校正 (16) 3.1.2 ()y x r,和()y x s,未知条件下的几何失真 (16) 3.2 灰度插值 (17) 3.3 结果分析 (19) 参考文献 (20) 附录 (21)
1 MATLAB 6.x信号处理 (1)对MATLAB 6 进行了简介,包括程序设计环境、基本操作、绘图功能、M文件以及MATLAB 6 的稀疏矩阵这五个部分。MATLAB的工作环境有命令窗口、启动平台、工作空间、命令历史记录与当前路径窗口这四部分。M文件的编辑调试环境有四个部分的设置,分别是:Editor/Debugger的参数设置,字体与颜色的设置,显示方式的设置,键盘与缩进的设置。MATLAB采用路径搜索的方法来查找文件系统的M文件,常用的命令文件组在MATLAB文件夹中,其他M文件组在各种工具箱中。基本操作主要是对一些常用的基本常识、矩阵运算及分解、数据分析与统计这三方面进行阐述。MATLAB的基本操作对象时矩阵,所以对于矩阵的输入、复数与复数矩阵、固定变量、获取工作空间信息、函数、帮助命令进行了具体的描述。矩阵运算是MATLAB的基础,所有参与运算的数都被看做为矩阵。MATLAB中共有四大矩阵分解函数:三角分解、正交分解、奇异值分解以及特征值分解。数据分析与统计包括面向列的数据分析、数据预处理、协方差矩阵与相关系数矩阵、曲线拟合这四部分。MATLAB 中含有丰富的图形绘制寒素,包括二维图形绘制、三维图像绘制以及通用绘图工具函数等,同时还包括一些专业绘图函数,因此其具有很强大的绘图功能。简单的二维曲线可以用函数plot来绘制,而简单的三维曲线图则用plot3来绘制。在绘制图形时,MATLAB自动选择坐标轴表示的数值范围,并用一定的数据间隔标记做标注的数据,当然自己也可以指定坐标轴的范围与数据间隔。专业的绘图函数有绘梯度图制条形图、饼图、三维饼图、箭头图、星点图、阶梯图以及等高线。M文件时用户自己通过文本编辑器或字处理器生成的,且其之间可以相互调用,用户可以根据自己的需要,自我编写M文件。M文件从功能上可以分为底稿文件与函数文件两类,其中底稿文件是由一系列MATLAB语句组成的,而函数文件的第一行必须包含关键字“function”,二者的区别在于函数文件可以接受输入参数,并可返回输出参数,而底稿文件不具备参数传递的功能;在函数文件中定义及使用的变量大都是局部变量,只在本函数的工作区内有效,一旦退出该函数,即为无效变量,而底稿文件中定义或使用的变量都是全局变量,在退出文件后仍为有效变量。稀疏矩阵是一种特殊类型的矩阵,
Matlab图像处理的几个实例(初学者用) 1.图像的基本信息及其加减乘除 clear,clc; P=imread('yjx.jpg'); whos P Q=imread('dt.jpg'); P=im2double(P); Q=im2double(Q); gg1=im2bw(P,0.3); gg2=im2bw(P,0.5); gg3=im2bw(P,0.8); K=imadd(gg1,gg2); L=imsubtract(gg2,gg3); cf=immultiply(P,Q); sf=imdivide(Q,P); subplot(421),imshow(P),title('郁金香原图'); subplot(422),imshow(gg1),title('0.3'); subplot(423),imshow(gg2),title('0.5'); subplot(424),imshow(gg3),title('0.8'); subplot(425),imshow(K),title('0.3+0.5'); subplot(426),imshow(L),title('0.5-0.3'); subplot(427),imshow(cf),title('P*Q'); subplot(428),imshow(sf),title('P/Q'); 2.图像缩放 clear,clc; I=imread('dt.jpg'); A=imresize(I,0.1,'nearest'); B=imresize(I,0.4,'bilinear'); C=imresize(I,0.7,'bicubic'); D=imresize(I,[100,200]); F=imresize(I,[400,100]); figure subplot(321),imshow(I),title('原图'); subplot(322),imshow(A),title('最邻近插值'); subplot(323),imshow(B),title('双线性插值'); subplot(324),imshow(C),title('二次立方插值'); subplot(325),imshow(D),title('水平缩放与垂直缩放比例为2:1'); subplot(326),imshow(F),title('水平缩放与垂直缩放比例为1:4');
MATLAB数字图像处理 1 概述 BW=dither(I)灰度转成二值图; X=dither(RGB,map)RGB转成灰度图,用户需要提供一个Colormap; [X,map]=gray2ind(I,n)灰度到索引; [X,map]=gray2ind(BW,n)二值图到索引,map可由gray(n)产生。灰度图n默认64,二值图默认2; X=graylice(I,n)灰度图到索引图,门限1/n,2/n,…,(n-1)/n,X=graylice(I,v)给定门限向量v; BW=im2bw(I,level)灰度图I到二值图; BW=im2bw(X,map,level)索引图X到二值图;level是阈值门限,超过像素为1,其余置0,level在[0,1]之间。 BW=im2bw(RGB,level)RGB到二值图; I=ind2gray(X,map)索引图到灰度图; RGB=ind2rgb(X,map)索引图到RGB; I=rgb2gray(RGB)RGB到灰度图。 2 图像运算 2.1 图像的读写 MATLAB支持的图像格式有bmp,gif,ico,jpg,png,cur,pcx,xwd和tif。 读取(imread): [1] A=imread(filename,fmt) [2] [X,map]=imread(filename,fmt) [3] […]=imread(filename) [4] […]=imread(URL,…) 说明:filename是图像文件名,如果不在搜索路径下应是图像的全路径,fmt是图像文件扩展名字符串。前者可读入二值图、灰度图、彩图(主要是RGB);第二个读入索引图,map 为索引图对应的Colormap,即其相关联的颜色映射表,若不是索引图则map为空。URL表示引自Internet URL中的图像。 写入(imwrite): [1] R=imwrite(A,filename,fmt); [2] R=imwrite(X,map,filename,fmt); [3] R=imwrite(…,filename); [4] R=imwrite(…,Param1,V al1,Param2,Val2) 说明:针对第四个,该语句用于指定HDF,JPEG,PBM,PGM,PNG,PPM,TIFF等类型输出文件的不同参数。例如HDF的Quality,Compression,WriteMode;JPEG的BitDepth,Comment:Empty or not,Mode:lossy or lossless,Quality等。 2.2 图像的显示 方法1:使用Image Viewer(图像浏览器),即运用imview函数。 同时显示多帧图像的所有帧,可用到montage函数。
基于matlab的图像识别与匹配 摘要 图像的识别与匹配是立体视觉的一个重要分支,该项技术被广泛应用在航空测绘,星球探测机器人导航以及三维重建等领域。 本文意在熟练运用图像的识别与匹配的方法,为此本文使用一个包装袋并对上面的数字进行识别与匹配。首先在包装袋上提取出来要用的数字,然后提取出该数字与包装袋上的特征点,用SIFT方法对两幅图进行识别与匹配,最终得到对应匹配数字的匹配点。仿真结果表明,该方法能够把给定数字与包装袋上的相同数字进行识别与匹配,得到了良好的实验结果,基本完成了识别与匹配的任务。
1 研究内容 图像识别中的模式识别是一种从大量信息和数据出发,利用计算机和数学推理的方法对形状、模式、曲线、数字、字符格式和图形自动完成识别、评价的过程。 图形辨别是图像识别技术的一个重要分支,图形辨别指通过对图形的图像采用特定算法,从而辨别图形或者数字,通过特征点检测,精确定位特征点,通过将模板与图形或数字匹配,根据匹配结果进行辨别。 2 研究意义 数字图像处理在各个领域都有着非常重要的应用,随着数字时代的到来,视频领域的数字化也必将到来,视频图像处理技术也将会发生日新月异的变化。在多媒体技术的各个领域中,视频处理技术占有非常重要的地位,被广泛的使用于农业,智能交通,汽车电子,网络多媒体通信,实时监控系统等诸多方面。因此,现今对技术领域的研究已日趋活跃和繁荣。而图像识别也同样有着更重要的作用。 3 设计原理 3.1 算法选择 Harris 角点检测器对于图像尺度变化非常敏感,这在很大程度上限制了它的应用范围。对于仅存在平移、旋转以及很小尺度变换的图像,基于Harris 特征点的方法都可以得到准确的配准结果,但是对于存在大尺度变换的图像,这一类方法将无法保证正确的配准和拼接。后来,研究人员相继提出了具有尺度不变性的特征点检测方法,具有仿射不变性的特征点检测方法,局部不变性的特征检测方法等大量的基于不变量技术的特征检测方法。 David.Lowe 于2004年在上述算法的基础上,总结了现有的基于不变量技术的特征检测方法,正式提出了一种基于尺度空间的,对图像平移、旋转、缩放、甚至仿射变换保持不变性的图像局部特征,以及基于该特征的描述符。并将这种方法命名为尺度不变特征变换(Scale Invariant Feature Transform),以下简称SIFT 算法。SIFT 算法首先在尺度空间进行特征检测,并确定特征点的位置和特征点所处的尺度,然后使用特征点邻域梯度的主方向作为该特征点的方向特征,以实现算子对尺度和方向的无关性。利用SIFT 算法从图像中提取出的特征可用于同一个物体或场景的可靠匹配,对图像尺度和旋转具有不变性,对光照变化、
信号与系统实验报告——图像处理 学院:信息科学与工程学院 专业:2014级通信工程 组长:** 组员:** 2017.01.02
目录 目录 (2) 实验一图像一的细胞计数 (3) 一、实验内容及步骤 (3) 二、Matlab程序代码 (3) 三、数据及结果 (4) 实验二图像二的图形结构提取 (5) 一、实验内容及步骤 (5) 二、Matlab程序代码 (5) 三、数据及结果 (6) 实验三图像三的图形结构提取 (7) 一、实验内容及步骤 (7) 二、Matlab程序代码 (7) 三、数据及结果 (8) 实验四图像四的傅里叶变化及巴特沃斯低通滤波 (9) 一、实验内容及步骤 (9) 二、Matlab程序代码 (9) 三、数据及结果 (10) 实验五图像五的空间域滤波与频域滤波 (11) 一、实验内容及步骤 (11) 二、Matlab程序代码 (11) 三、数据及结果 (12)
实验一图像一的细胞计数 一、实验内容及步骤 将该图形进行一系列处理,计算得到途中清晰可见细胞的个数。 首先,由于原图为RGB三色图像处理起来较为麻烦,所以转为灰度图,再进行二值化化为黑白图像,得到二值化图像之后进行中值滤波得到细胞分布的初步图像,为了方便计数对图像取反,这时进行一次计数,发现得到的个数远远多于实际个数,这时在进行一次中值滤波,去掉一些不清晰的像素点,剩下的应该为较为清晰的细胞个数,再次计数得到大致结果。 二、Matlab程序代码 clear;close all; Image = imread('1.jpg'); figure,imshow(Image),title('原图'); Image=rgb2gray(Image); figure,imshow(Image),title('灰度图'); Theshold = graythresh(Image); Image_BW = im2bw(Image,Theshold); Reverse_Image_BW22=~Image_BW; figure,imshow(Image_BW),title('二值化图像'); Image_BW_medfilt= medfilt2(Image_BW,[3 3]); figure,imshow(Image_BW_medfilt),title('中值滤波后的二值化图像'); Reverse_Image_BW = ~Image_BW_medfilt; figure,imshow(Reverse_Image_BW),title('图象取反'); Image_BW_medfilt2= medfilt2(Reverse_Image_BW,[20 20]); figure,imshow(Image_BW_medfilt2),title('第二次中值滤波的二值化图像'); [Label, Number]=bwlabel(Image_BW_medfilt,8);Number [Label, Number]=bwlabel(Image_BW_medfilt2,8);Number
图像灰度变换 内容摘要 1 引言 通常经输入系统获取的图像信息中含有各种各样的噪声与畸变,例如室外光照度不够均匀会造成图像灰度过于集中;由摄像头获得的图像经过A/D转换、线路传送都会产生噪声污染等等,这些不可避免地影响系统图像清晰度,降低了图像质量,轻者表现为图像不干净,难以看清细节;重者表现为图像模糊不清,连概貌都看不出来。因此,在对图像经行分析前,必须对图像质量经行改善,一般情况下改善的方法有两类:图像增强和图像复原。图像增强的目的是设法改善图像的视觉效果,提高图像的可读性,将图像中感兴趣的特征有选择的突出,便于人与计算机的分析和处理。图像增强不考虑图像质量下降的原因,只将图像中感兴趣的特征有选择的突出,而衰减不需要的特征。灰度变换是图像增强处理中一种非常基础直接的空间域图像处理方法。灰度变换是根据某种条件按一定变换关系逐点改变原图像中每一个像素灰度值的方法。 1.灰度的线性变换 当图像由于成像时曝光不足或过度, 由于成像设备的非线性或图像记录设备动态范围太窄等因素, 都会产生对比度不足的弊病, 使图像中的细节分辨不清。这时如将图像灰度线性扩展, 常能显著改善图像的主观质量。假设原图像f (x, y ) 的灰度范围是[ a, b ] 希望变换后图像的灰度范围扩展到[ c, d ] 则: M f 表示f ( x, y ) 的最大值。在线性灰度变换中,灰度执照完全线性变换函数进行变换。该线性灰度线性变换函数f ( r ) 是一个一维线性函数: 其中, a 为线性变换的斜率, b 为线性变换函数在y 轴的截距, 如图1所示。
在灰度的线性变换中, 当a > 1时, 输出图像的对比度将增大; 当a < 1时, 输出图像的对比 度将减小; 当a = 1且b ?0时, 所进行的操作仅使所有像素的灰度值上移或下移, 其效果 是使整个图像更暗或更亮; 如果a < 0, 则暗区域将变亮, 亮区域将变暗。 2分段线性灰度变换 为了突出感兴趣的目标或者灰度区间, 相对抑制那些不感兴趣的灰度区域, 可采用分段线性法。常用的是三段线性变换。分段线性变换称为图像直方图的拉伸, 它与完全线性变换类似, 其不同之处在于其变换函数是分段的, 如图2所示: 其变换函数表达式如下: 灰度拉伸可以更加灵活地控制输出灰度直方图的分布, 它可以有选择地拉伸某段灰度区间以改善输出图像。图2所示的变换函数的运算结果是将原图在r1 和r2 之间的灰度拉伸到s1 和s2 之间。如果一幅图像灰度集中在较暗的区域而导致图像偏暗, 可以用灰度拉伸功能来拉伸(斜率> 1) 物体灰度区间以改善图像; 同样如果图像灰度集中在较亮的区域而导致图像偏亮, 也可以用灰度拉伸功能来压缩(斜率< 1) 物体灰度区间来改善图像质量。 3非线性灰度变换
中北大学 课程设计说明书 学生姓名:学号: 学生姓名:学号: 学生姓名:学号: 学院:信息商务学院 专业:电子信息工程 题目:信息处理综合实践: 基于MATLAB的图像恢复算法研究 指导教师:职称: 年月日
中北大学 课程设计任务书 13/14 学年第一学期 学院:信息商务学院 专业:电子信息工程 学生姓名:学号: 学生姓名:学号: 学生姓名:学号: 课程设计题目:信息处理综合实践: 于MATLAB的图像恢复算法研究起迄日期: 课程设计地点:电子信息科学与技术专业实验室 指导教师: 系主任: 下达任务书日期: 年月日
目录 摘要: (6) 1.图像复原的概念 (6) 1.1图像复原的定义 (6) 1.2 图象恢复与图象增强的异同 (6) 1.3 图象退化的原因 (6) 1.4 维纳滤波的研究历史 (6) 1.5图象退化举例 (7) 2.退化模型 (8) 2.1图象退化模型概述 (8) 2.2连续函数退化模型 (8) 2.3离散函数退化模型 (8) 3.图象复原技术 (9) 3.1无约束恢复 (9) 3.2逆滤波 (9) 3.3 维纳(Wiener)滤波器基本原理 (10) 3.4维纳滤波复原法 (11) 3.5图像复原例图 (12) 4.图像复原的MATLAB实现实例 (13) 5.结束语 (14) 参考文献: (14) 附录: (14) (1).维纳滤波复原源代码: (14) (2).规则化滤波复原程序源代码: (15) (3).Lucy-Richardson复原滤波源代码: (15) (4).盲目去卷积复原源代码: (15)
摘要: 图像复原是图象处理的一个重要课题。图像复原也称图象恢复,是图象 处理中的一大类技术。它的主要目的是改善给定的图像质量。当给定了一幅 退化了的或者受到噪声污染了的图像后,利用退化现象的某种先验知识来重 建或恢复原有图像是复原处理的基本过程。可能的退化有光学系统中的衍 射,传感器非线性畸变,光学系统的像差,摄影胶片的非线性,大气湍流的 扰动效应,图像运动造成的模糊及几何畸变等等。噪声干扰可以由电子成像 系统传感器、信号传输过程或者胶片颗粒性造成。各种退化图像的复原都 可归结为一种过程,具体地说就是把退化模型化,并且采用相反的过程进行 处理,以便恢复出原图像。文章介绍了图象退化的原因,几种常用的图像滤 波复原技术,以及用MATLAB实现图像复原的方法。 1.图像复原的概念 1.1图像复原的定义 图像复原也称图象恢复,是图象处理中的一大类技术。所谓图像复原,是指去除或减轻在获取数字图像过程中发生的图像质量下降(退化)这些退化包括由光学系统、运动等等造成图像的模糊,以及源自电路和光度学因素的噪声。图像复原的目标是对退化的图像进行处理,使它趋向于复原成没有退化的理想图像。成像过程的每一个环节(透镜,感光片,数字化等等)都会引起退化。在进行图像复原时,既可以用连续数学,也可以用离散数学进行处理。其次,处理既可在空间域,也可在频域进行。 1.2 图象恢复与图象增强的异同 相同点:改进输入图像的视觉质量。 不同点:图象增强目的是取得较好的视觉结果(不考虑退化原因);图象恢复根据相应的退化模型和知识重建或恢复原始的图像(考虑退化原因)。 1.3 图象退化的原因 图象退化指由场景得到的图像没能完全地反映场景的真实内容,产生了失真等问题。其原因是多方面的。如: 透镜象差/色差 聚焦不准(失焦,限制了图像锐度) 模糊(限制频谱宽度) 噪声(是一个统计过程) 抖动(机械、电子) 1.4 维纳滤波的研究历史 维纳是著名的数学家,后来被誉为信息理论家。维纳的著作不仅是一个很好的创见,而且具有结合工程的实际意义,是线性滤波理论研究的一个重要的开端. 在第二次世界大战中,由于雷达的发明以及防空炮火控制的任务,把大量有修养的数学家和物理学家都动员到信息科学这个研究领域中来了,这个时候人们活跃于这个领域,并有许多重大的科学创造。数学家维纳对于滤波理论的研究成果,就是这时候重大的科学创见之一。
图像处理函数详解——strel 功能:用于膨胀腐蚀及开闭运算等操作的结构元素对象(本论坛随即对膨胀腐蚀等操作进行讲解)。 用法:SE=strel(shape,parameters) 创建由指定形状shape对应的结构元素。其中shape的种类有 arbitrary' 'pair' 'diamond' 'periodicline' 'disk' 'rectangle' 'line' 'square' 'octagon 参数parameters一般控制SE的大小。 例子: se1=strel('square',6) %创建6*6的正方形 se2=strel('line',10,45) %创建直线长度10,角度45 se3=strel('disk',15) %创建圆盘半径15 se4=strel('ball',15,5) %创建椭圆体,半径15,高度5
图像处理函数详解——roipoly 功能:用于选择图像中的多边形区域。 用法:BW=roipoly(I,c,r) BW=roipoly(I) BW=roipoly(x,y,I,xi,yi) [BW,xi,yi]=roipoly(...) [x,y,BW,xi,yi]=roipoly(...) BW=roipoly(I,c,r)表示用向量c、r指定多边形各点的X、Y坐标。BW选中的区域为1,其他部分的值为0. BW=roipoly(I)表示建立交互式的处理界面。 BW=roipoly(x,y,I,xi,yi)表示向量x和y建立非默认的坐标系,然后在指定的坐标系下选择由向量xi,yi指定的多边形区域。 例子:I=imread('eight.tif'); c=[222272300270221194]; r=[21217512112175]; BW=roipoly(I,c,r); imshow(I)
附录1 课程实验报告格式 每个实验项目包括:1)设计思路,2)程序代码,3)实验结果,4)实验中出现的问题及解决方法。 实验一:直方图灰度变换 A:读入灰度图像‘debye1.tif’,采用交互式操作,用improfile绘制一条线段的灰度值。 imread('rice.tif'); imshow('rice.tif'),title('rice.tif'); improfile,title('主对角线上灰度值')
B:读入RGB图像‘flowers.tif’,显示所选线段上红、绿、蓝颜色分量的分布imread('flowers.tif'); imshow('flowers.tif'),title('flowers.tif'); improfile,title('主对角线红绿蓝分量') C:图像灰度变化 f=imread('rice.png'); imhist(f,256); %显示其直方图 g1=imadjust(f,[0 1],[1 0]); %灰度转换,实现明暗转换(负片图像) figure,imshow(g1)%将0.5到0.75的灰度级扩展到范围[0 1] g2=imadjust(f,[0.5 0.75],[0 1]); figure,imshow(g2) 图像灰度变换处理实例: g=imread('me.jpg'); imshow(g),title('原始图片'); h=log(1+double(g)); %对输入图像对数映射变换 h=mat2gray(h); %将矩阵h转换为灰度图片
h=im2uint8(h); %将灰度图转换为8位图 imshow(h),title('转换后的8位图'); 运行后的结果: 实验二:直方图变换 A:直方图显示 I=imread('cameraman.tif'); %读取图像 subplot(1,2,1),imshow(I) %输出图像 title('原始图像') %在原始图像中加标题 subplot(1,2,2),imhist(I) %输出原图直方图 title('原始图像直方图') %在原图直方图上加标题运行结果如下:
数字图像处理 报告名称:字母识别 学院:信息工程与自动化学院专业:物联网工程 学号:201310410149 学生姓名:廖成武 指导教师:王剑 日期:2015年12月28日 教务处制
目录 字母识别 1.---------------------测试图像预处理及连通区域提取 2.---------------------样本库的建立采集feature 3.---------------------选择算法输入测试图像进行测试 4.---------------------总结
字母识别 1.imgPreProcess(联通区域提取)目录下 conn.m:连通区域提取分割(在原图的基础上进行了膨胀、腐蚀、膨胀的操作使截取的图像更加接近字母) %%提取数字的边界,生成新的图 clear; clc; f=imread('5.jpg'); f=imadjust(f,[0 1],[1 0]); SE=strel('square',5); %%膨胀、腐蚀、膨胀 A2=imdilate(f,SE); SE=strel('disk',3) f=imerode(A2,SE) SE=strel('square',3); f=imdilate(f,SE); gray_level=graythresh(f); f=im2bw(f,gray_level); [l,n]=bwlabel(f,8) %%8连接的连接分量标注 imshow(f) hold on for k=1:n %%分割字符子句 [r,c]=find(l==k); rbar=mean(r); cbar=mean(c); plot(cbar,rbar,'Marker','o','MarkerEdgeColor','g','MarkerFaceColor',' y','MarkerSize',10); % plot(cbar,rbar,'Marker','*','MarkerEdgecolor','w'); row=max(r)-min(r) col=max(c)-min(c) for i=1:row for j=1:col seg(i,j)=1; end
基于MATLAB的运动模糊图像处理 提醒: 我参考了文献里的书目和网上的一些代码而完成的,所以误差会比较大,目前对于从网上下载的模糊图片的处理效果很不好,这是我第一次上传自己完成的实验的文档,希望能帮到一些人吧。 研究目的 在交通系统、刑事取证中图像的关键信息至关重要,但是在交通、公安、银行、医学、工业监视、军事侦察和日常生活中常常由于摄像设备的光学系统的失真、调焦不准或相对运动等造成图像的模糊,使得信息的提取变得困难。但是相对于散焦模糊,运动模糊图像的复原在日常生活中更为普遍,比如高速运动的违规车辆的车牌辨识,快速运动的人群中识别出嫌疑人、公安刑事影像资料中提取证明或进行技术鉴定等等,这些日常生活中的重要应用都需要通过运动模糊图像复原技术来尽可能地去除失真,恢复图像的原来面目。因此对于运动模糊图像的复原技术研究更具有重要的现实意义。 图像复原原理 本文探讨了在无噪声的情况下任意方向的匀速直线运动模糊图像的复原问题,并在此基础上讨论了复原过程中对点扩散函数(PSF)的参数估计从而依据自动鉴别出的模糊方向和长度构造出最为近似的点扩散函数,构造相应的复原模型,实现运动模糊图像的复原;在模糊图像自动复原的基础上,根据恢复效果图的纹理特征和自动鉴别出的模糊长度和角度,人工调整模糊方向和长度参数,使得复原效果达到最佳。 实验过程 模糊方向的估计: 对图1(a)所示的原始图像‘车牌’图像做方向θ=30?,长度L=20像素的匀速直线运动模糊,得到退化图像如图1(b)
1(a) 1(b) j=imread('车牌1.jpg'); figure(1),imshow(j); title('原图像'); len=20; theta=30; psf=fspecial('motion',len,theta); j1=imfilter(j,psf,'circular','conv'); figure,imshow(j1); title('PSF 模糊图像'); 图1(c)和1(d)分别为原图像和模糊图像的二次傅里叶变化
实验一Matlab图像处理基础及图像灰度变换 一、实验目的 了解Matlab平台下的图像编程环境,熟悉Matlab中的DIP (Digital Image Processing)工具箱;掌握Matlab中图像的表示方法,图像类型、数据类型的种类及各自的特点,并知道怎样在它们之间进行转换。掌握Matlab环境下的一些最基本的图像处理操作,如读图像、写图像、查看图像信息和格式、尺寸和灰度的伸缩等等;通过实验掌握图像直方图的描绘方法,加深直方图形状与图像特征间关系间的理解;加深对直方图均衡算法的理解。 二、实验内容 1.从硬盘中读取一幅灰度图像; 2.显示图像信息,查看图像格式、大小、位深等内容; 3.用灰度面积法编写求图像方图的Matlab程序,并画图; 4.把第3步的结果与直接用Matlab工具箱中函数histogram的结果进行比较,以衡量第3步中程序的正确性。 5.对读入的图像进行直方图均衡化,画出处理后的直方图,并比较处理前后图像效果的变化。 三、知识要点 1.Matlab6.5支持的图像图形格式 TIFF, JEPG, GIF, BMP, PNG, XWD (X Window Dump),其中GIF不支持写。 2.与图像处理相关的最基本函数 读:imread; 写:imwrite; 显示:imshow; 信息查看:imfinfo; 3.Matlab6.5支持的数据类 double, unit8, int8, uint16, int16, uint32, int32, single, char (2 bytes per element), logical. 4.Matlab6.5支持的图像类型 Intensity images, binary images, indexed images, RGB image 5.数据类及图像类型间的基本转换函数 数据类转换:B = data_class_name(A);
MATLAB实现图像恢复设计报告 一、设计目标及需求分析 设计目标:希望通过matlab设计一个软件来实现对CT图像的模糊再恢复的过程,是对现实中CT图像复原的一个简单仿真。 需求分析:随着网络和通信技术的发展,数字图像处理与分析技术已经在科学研究、工业生产、医疗卫生、教育等领域得到了广泛应用,对推动社会的发展和提高人们的生活水平都起到了重要作用[1]。而在医学CT影像中,CT图像的影响因素众多,包括部分容积效应,空间分辨力,密度分辨力,相机条件设定和噪声等[2]。这些因素会造成CT 图像模糊失真,需要对图像进行恢复,才能满足对临床诊断的要求。 二、设计概要 图像退化 三、详细设计 在GUI界面设计中选取三个静态文本分别叫“原始图像”、“模糊加噪图像”、“恢复图像”,添加三个坐标轴,三个按钮分别用于“读入原始图像”、“模糊和加噪”、“恢复”。 图一 GUI界面设计
①点击按钮“读入图像”,将选取的原始肺部CT图像导入第一个坐标轴中。 ②点击按钮“模糊和加噪”,对原始CT图像进行运动模糊,加入高斯噪声,生成的图像显示在第二个坐标轴中。 图二模糊和加噪 在这里用MATLAB图像处理工具函数fspecial生成了一个运动模糊的点扩展函数PSF,PSF 再与原图卷积得到模糊图像,这一步操作是为了模拟现实CT图像中由于病人身体的移动,心脏搏动和胃肠蠕动这些不自主的运动造成的伪影。在CT图像中的噪声有多种类型,有高斯噪声,椒盐噪声,泊松噪声,斑点噪声等。这里只引入了高斯噪声是由于通过查阅文献得知,CT图像中的噪声主要是高斯噪声[3],是一个抽象简化的退化模型。 ③点击按钮“恢复”,对模糊和加噪的图像进行图像复原,将复原后的图像显示在第三个坐标轴上。
《数字图像处理》课程设计 课设题目:图像增强与MATLAB实现学校学院:华东交通大学理学院 学生班级:13级信息计算(2)班学生:超 学生学号:20130810010216 指导老师:自柱
图像增强与MATLAB实现 摘要 数字图像处理是指将图像信号转换成数字格式并利用计算机对其进行处理的过程。图像增强是数字图像处理的过程中经常采用的一种方法,它对提高图像质量起着重要的作用。本文先对图像增强的原理进行概述,然后对图像增强的方法分类并给出直方图增强、对比度增强、平滑和锐化等几种常用的增强方法的理论基础,通过Matlab实验得出的实际处理效果来对比各种算法的优缺点,讨论不同的增强算法的技术要点,并对其图像增强方法进行性能评价。 关键字:图像;图像增强;算法
目录 一、MATLAB的简介 (1) 1.1MATLAB主要功能 (1) 二、MATLAB的主要功能 (1) 2.1数字增强技术概述 (1) 2.2数字图像的表示 (2)
三、直方图的均衡化 (2) 3.1图像的灰度 (2) 3.2灰度直方图 (2) 3.3直方图均衡化 (3) 四、图像二值化 (5) 4.1图像二值化 (5) 五、对比度增强 (7) 5.1对比度增强 (7) 5.2灰度调整 (8) 5.3对数变换 (9) 六、滤波 (10) 6.1平滑滤波 (10) 6.2线性平滑滤波程序: (11) 6.3非线性滤波 (12) 七、锐化 (18) 八、参考文献 (19) 九、自我评价 (20)
一、Matlab的简介 1.1 MATLAB主要功能 MATLAB是建立在向量、数组和矩阵基础上的一种分析和仿真工具软件包,包含各种能够进行常规运算的“工具箱”,如常用的矩阵代数运算、数组运算、方程求根、优化计算及函数求导积分符号运算等;同时还提供了编程计算的编程特性,通过编程可以解决一些复杂的工程问题;也可绘制二维、三维图形,输出结果可视化。目前,已成为工程领域中较常用的软件工具包之一。 二、MATLAB的主要功能 2.1数字增强技术概述 图像增强是按特定的需要突出一幅图像中的某些信息,同时,消弱或去除某些信息使得图像更加实用。图像增强技术主要包含直方图修改处理、图像平滑处理、图像尖锐化处理等。 图像增强技术主要包括:直方图修改处理,图像平滑处理,图像尖锐化处理,彩色图像处理。从纯技术上讲主要有两类:频域处理法和空域处理法。 频域处理法主要是卷积定理,采用修改图像傅立叶变换的方法实现对图像的增强处理技术;空域处理法:是直接对图像中的像素进行处理,基本上是以灰度映射变换为基础的。
《基础强化训练》设计报告 题目:二维灰度图象的统计分析及变换处理专业班级: 学生姓名: 指导教师: 2010 年7 月17 日
《基础强化训练》设计任务书 学生姓名:专业班级: 指导教师:工作单位: 题目: 二维灰度图象的统计分析及(FFT)变换处理 课程设计目的: ①较全面了解常用的数据分析与处理原理及方法; ②能够运用相关软件进行模拟分析; ③掌握基本的文献检索和文献阅读的方法; ④提高正确地撰写论文的基本能力。 课程设计内容和要求 ①采集一幅像素大于64*64黑白图像; ②常规的数学统计数据处理:计算图象各象素点灰度值得均值、标准差、方差,并绘出灰度直方图; ③采用[FFT(傅立叶变换)]对图像进行分析 初始条件: ①MATLAB软件。 ②数字信号处理与图像处理基础知识。 时间安排: 第18周周一:安排任务 19~20周:仿真设计(鉴主13楼计算机实验室) 第20周周六:完成(答辩,提交报告,演示) 指导教师签名:年月日 系主任(或责任教师)签名:年月日
目录 摘要 (1) Abstract (2) 1 数据采集 (3) 1.1图像的选取 (3) 1.2 MATLAB读取方法 (4) 1.2.1 编辑M文件 (4) 1.2.2 图像的读取 (4) 1.2.3查看图像的格式 (6) 1.2.4 灰度值的获取 (7) 2 数据统计处理 (8) 2.1 均值计算 (8) 2.1.1 原理及计算公式 (8) 2.1.2 计算程序及结果 (9) 2.2 各像素点灰度值的标准差 (9) 2.3 各像素点灰度值的方差 (10) 2.4 灰度直方图 (11) 3.傅立叶变化 (13) 3.1 原理及计算公式 (13) 3.2 变换及逆变换程序及结果 (14) 3.3对变换后的图像的说明 (16) 4.总结(心得体会) (17) 5.参考文献 (18)
3.基于matlab的人脸识别算法 3.1 问题描述 对于一幅图像可以看作一个由像素值组成的矩阵,也可以扩展开,看成一个矢量,如一幅 N*N 象素的图像可以视为长度为N2 的矢量,这样就认为这幅图像是位于N2 维空间中的一个点,这种图像的矢量表示就是原始的图像空间,但是这个空间仅是可以表示或者检测图像的许多个空间中的一个。不管子空间的具体形式如何,这种方法用于图像识别的基本思想都是一样的,首先选择一个合适的子空间,图像将被投影到这个子空间上,然后利用对图像的这种投影间的某种度量来确定图像间的相似度,最常见的就是各种距离度量。因此,本次试题采用PCA算法并利用GUI实现。 对同一个体进行多项观察时,必定涉及多个随机变量X1,X2,…,Xp,它们都是的相关性, 一时难以综合。这时就需要借助主成分分析来概括诸多信息的主要方面。我们希望有一个或几个较好的综合指标来概括信息,而且希望综合指标互相独立地各代表某一方面的性质。 任何一个度量指标的好坏除了可靠、真实之外,还必须能充分反映个体间的变异。如果有一项指标,不同个体的取值都大同小异,那么该指标不能用来区分不同的个体。由这一点来看,一项指标在个体间的变异越大越好。因此我们把“变异大”作为“好”的标准来寻求综合指标。3.1.1 主成分的一般定义 设有随机变量X1,X2,…,Xp,其样本均数记为,,…,,样本标准差记为S1,S2,…,Sp。首先作标准化变换,我们有如下的定义: (1) 若C1=a11x1+a12x2+ … +a1pxp,…,且使 Var(C1)最大,则称C1为第一主成分; (2) 若C2=a21x1+a22x2+…+a2pxp,…,(a21,a22,…,a2p)垂直于(a11,a12,…,a1p),且使Var(C2)最大,则称C2为第二主成分; (3) 类似地,可有第三、四、五…主成分,至多有p个。 3.1.2 主成分的性质 主成分C1,C2,…,Cp具有如下几个性质: (1) 主成分间互不相关,即对任意i和j,Ci 和Cj的相关系数 Corr(Ci,Cj)=0 i j (2) 组合系数(ai1,ai2,…,aip)构成的向量为单位向量, (3) 各主成分的方差是依次递减的,即 Var(C1)≥Var(C2)≥…≥Var(Cp)
基于MATLAB的运动模糊图像恢复技术 王洪珏 (温州医学院,浙江,温州) 摘要:MATLAB是当今流行的科学计算软件,它具有很强的数据处理能力。在其图像处理工具箱中有四个图像复原函数,本文就这些函数的算法原理、运用和恢复处理效果结合实力效果作简要对比讨论。 0前言 图像复原时图像处理中一个重要的研究课题。图像在形成、传输和记录的过程中,由于传感器的噪声、摄像机未对好焦、摄像机与物体相对运动、系统误差、畸变、噪声等因素的影响,使图像往往不是真实景物的完善影像。这种图像在形成、传输和记录过程中,由于成像系统、传输介质和设备的不完善,使图像质量下降的过程称为图像的退化。图像复原就是通过计算机处理,对质量下降的图像加以重建或恢复的过程。 图像复原过程一般为:找退化原因→建立退化模型→反向推演→图像复原 1算法产生概述 开发算法时,首先要创建图像退化的线性数学模型,接着选择准则函数,并以适当的数学形式表达,然后进行数学推演。推演过程中通常要进行表达形式(即空域形式、频域形式、矩阵-矢量形式或变换域形式)的相互转换,最后得到图像复原算式。 退化数学模型的空域、频域、矢量-矩阵表达形式分别是: g(x,y)=d(x,y)*f(x,y)+n(x,y) G(u,v)=D(u,v)〃F(u,v)+N(u,v) g=HF+n 其中:g(x,y)、d(x,y)、f(x,y)、n(x,y)分别为观测的退化图像、模糊函数、原图像、加性噪声,*为卷积运算符,(x=0,1,2,…,M-1),(y=0,1,2,…,N-1)。 2运动模糊的产生 景物与相机之间的相对运动通常会使相机所成的像存在运动模糊。对于线性移不变模糊,退化图像u0可以写成,u0=h*u+n,其中h为模糊核,*表示卷积,n为加性噪声。 由du/dt=0,文献[5]将这种运动模糊过程描述为波动方程:
程序实例 1旋转: x=imread('d:\MATLAB7\work\flower.jpg'); y=imrotate(x,200,'bilinear','crop'); subplot(1,2,1); imshow(x); subplot(1,2,2); imshow(y) 2.图像的rgb clear [x,map]=imread('D:\Program Files\MATLAB\R2012a\bin\shaohaihe\shh1.jpg');y=x(90:95,90:95);imshow(y)R=x(90:95,90:95,1);G=x(90:95,90:95,2);B=x(90:95,90:95,3);R,G,B 3.加法运算clear I=imread('D:\Program Files\MATLAB\R2012a\bin\shaohaihe\shh3.jpg');J=imnoise(I,'gaussian',0,0.02);%向图片加入高斯噪声subplot(1,2,1),imshow(I);%显示图片subplot(1,2,2),imshow(J);K=zeros(242,308);%产生全零的矩阵,大小与图片的大小一样for i=1:100%循环100加入噪声J=imnoise(I,'gaussian',0,0.02);J1=im2double(J);K=K+J1;end K=K/100; figure,imshow(K);save
4.减法 clear I=imread('D:\Program Files\MATLAB\R2012a\bin\shaohaihe\shao.jpg'); J=imread('D:\Program Files\MATLAB\R2012a\bin\shaohaihe\shao1.jpg'); K=imsubtract(I,J);%实现两幅图相减 K1=255-K;%将图片求反显示 figure;imshow(I); title('有噪声的图'); figure;imshow(J); title('原图'); figure;imshow(K1); title('提取的噪声'); save 5.图像的乘法 H=imread('D:\Program Files\MATLAB\R2012a\bin\shaohaihe\shao.jpg'); I=immultiply(H,1.2);将此图片乘以1.2 J=immultiply(H,2); subplot(1,3,1),imshow(H); title('原图'); subplot(1,3,2),imshow(I); title('·放大1.2'); subplot(1,3,3),imshow(J); title('放大2倍'); 6除法运算 moon=imread('moon.tif'); I=double(moon); J=I*0.43+90; K=I*0.1+90; L=I*0.01+90; moon2=uint8(J); moon3=uint8(K); moon4=uint8(L); J=imdivide(moon,moon2); K=imdivide(moon,moon3); L=imdivide(moon,moon4); subplot(2,2,1),imshow(moon); subplot(2,2,2),imshow(J,[]); subplot(2,2,3),imshow(K,[]); subplot(2,2,4),imshow(L,[]);