基于神经网络的自适应噪声抵消
摘要:噪声抵消技术是信号处理的主要问题之一。基于神经网络的自适应噪声抵消技术是一种能够很好的消除未知噪声源噪声影响的信号处理技术,克服了传统自适应噪声抵消技术的不足。本文通过对误差反向传播学习算法的多层前向人工神经网络的分析研究,结合传统的自适应噪声抵消系统的基本原理,建立了基于人工神经网络的自适应噪声抵消器,经过基于MA TLAB仿真实验,证明它具有较强的噪声滤除能力。
关键词:自适应滤波;噪声抵消;神经网络
Adaptive Noise CancellationTechnology Based on Neural Network Abstract:Noise cancellation technology is one of the major problems of signal processing. Adaptive noise cancellation technology based on neural network is a very good to eliminate noise effects of unknown signal processing technology, overcome the traditional adaptive noise cancellation of technology. This design,Through the back-propagation learning algorithm of multilayer feedforward neural network analysis and research, combining traditional adaptive noise cancellation system of basic principle, Established a adaptive noise cancellation based on artificial neural network, after simulation experiments based on the Matlab prove it has strong noise filtering ability. Keywords: adaptive filter;noise cancellation;neural network
1 引言
在工程实际中,经常会遇到强噪声背景中的微弱信号检测问题。在信号的传播路径中以及在信号处理过程中,都会引入噪声。噪声的引入影响了对真实信号的处理。有时候,较强的噪声会“遮盖”了信号,从而难以得到准确、稳定的真实信号。噪声对信号的污染在绝大多数情况下是不可避免的,因而,对噪声的消除和抑制是信号处理中极其重要的工作。通常实现最优滤波的滤波器为维纳滤波器与卡尔曼滤波器。它们均要求已知信号和噪声的先验知识,但在许多实际应用中往往无法预先得知。为此,发展了自适应滤波器,1965年美国斯坦福大学建成了第一个自适应噪声抵消(ANC)系统[1],随着计算机技术与集成电路技术的进步,新的自适应算法不断涌现出来,自适应噪声抵消在理论和应用上都得到了很大发展。如果滤波器的输入和输出具有非线性的映射关系,那么对应的滤波器称为非线性滤波。生活中在许多的实际信号里含有系统非线性引起的噪声或者存在非高斯噪声等,因而研究非线性滤波显得非常重要。因此引入基于神经网络的自适应噪声抵消技术[2]。
自1986年开始,神经网络随着反向传播(BP)算法的出现而得到复兴,此后对于神经网络的研究再度掀起高潮。由于神经网络具有高度并行性、很强的非线性、变换能力和学习能力,因此具有很大的应用潜力,也为自适应非线性滤波器提供了一种全新的思路和方法。其中,激活函数为Simoid的多层前向神经网络能够以任意精度实现非线性函数逼近[3],所以可用BP神经网络组成非线性自适应滤波器。通过将滤波器的误差信号与神经网络中能量函数对应起来,可实现神经网络自适应滤波器[4]。
2 自适应噪声抵消
滤波是现代通信和控制工程中常用的信号处理方法之一,所谓滤波,就是通过对一系列带有误差的实际测量数据进行处理来滤除信号中的干扰,从而尽可能地恢复一个被噪声干扰了的信息流的问题。滤波的种类很多,最简单的滤波器是权系数固定的线性滤波器。为了提高滤波性能,滤波的权系数(传
递函数)往往随输入信号而发生变化,这种滤波称为自适应滤波。
2.1 自适应滤波器
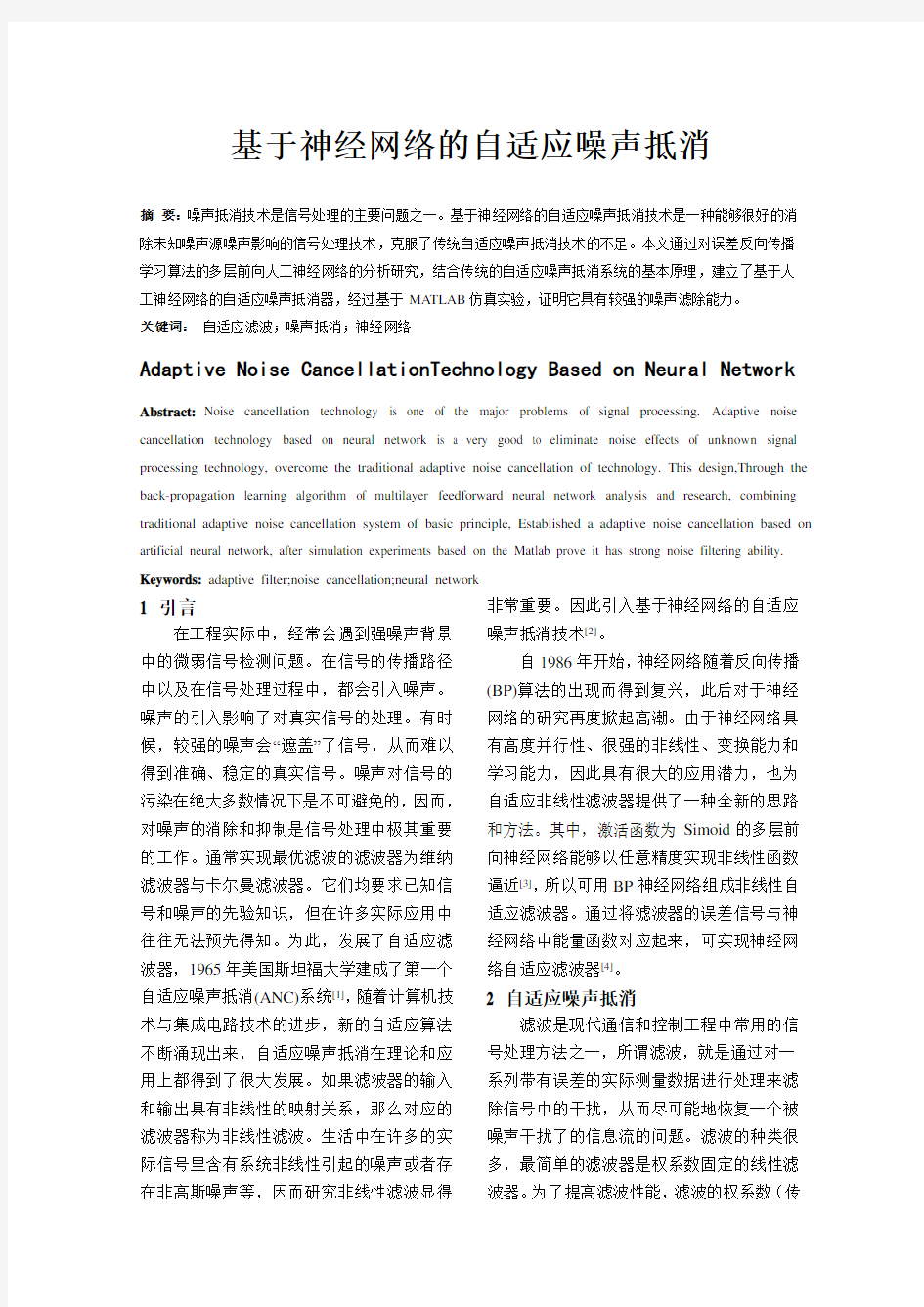
自适应滤波器自从60年代出现后,其理论在不断地发展与完善,应用也越来越广泛,自适应数字滤波器的原理框图[5]如图1所示。
图中:
x(j)表示j时刻的输入信号值;
y(j)表示j时刻的输出信号值;
d(j)表示j时刻的参考信号值或所期望响应的信号值;
e(j)表示误差信号e(j)=d(j)-y(j)。
自适应数字滤波器的滤波参数受误差信号e(j)的控制,根据e(j)值而自动调整,使之适合下一时刻(j+1)的输入x(j+1),以便使输出y(j+1)接近于所期望的参考信号d(j+1)。
图1 自适应数字滤波器的原理框图
2.2自适应噪声抵消系统基本原理
自适应噪声抵消系统除了需要原始输入外,还需要一个参考输入[6],供给与原始输入相关的噪声,以便原始输入中的噪声,而对其中的有用信号几乎不产生什么影响。
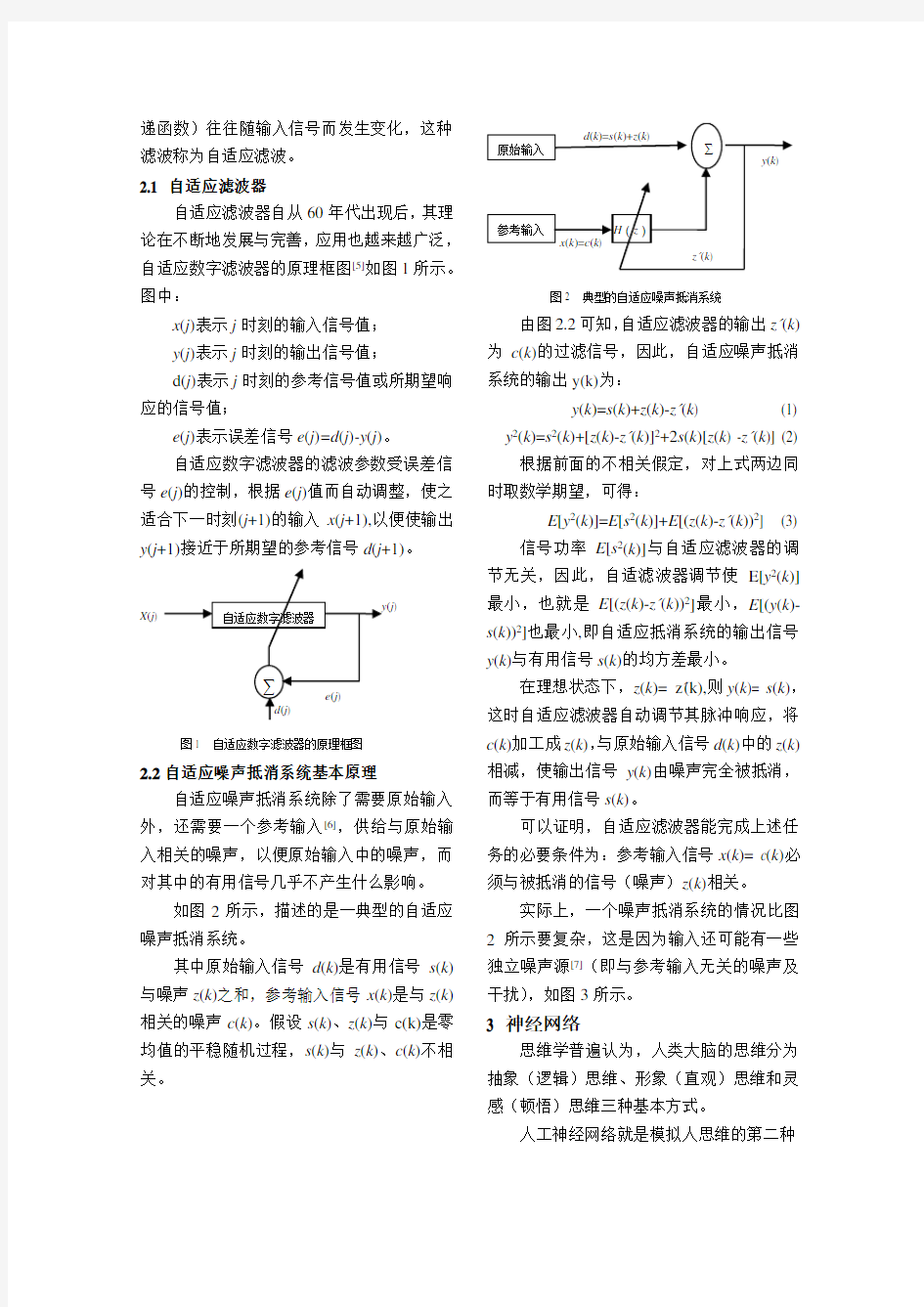
如图2所示,描述的是一典型的自适应噪声抵消系统。
其中原始输入信号d(k)是有用信号s(k)与噪声z(k)之和,参考输入信号x(k)是与z(k)相关的噪声c(k)。假设s(k)、z(k)与c(k)是零均值的平稳随机过程,s(k)与z(k)、c(k)不相关。
图2 典型的自适应噪声抵消系统
由图2.2可知,自适应滤波器的输出z′(k)为c(k)的过滤信号,因此,自适应噪声抵消系统的输出y(k)为:
y(k)=s(k)+z (k)-z′(k) (1) y2(k)=s2(k)+[z(k)-z′(k)]2+2s(k)[z(k) -z′(k)] (2)
根据前面的不相关假定,对上式两边同时取数学期望,可得:
E[y2(k)]=E[s2(k)]+E[(z(k)-z′(k))2] (3) 信号功率E[s2(k)]与自适应滤波器的调节无关,因此,自适滤波器调节使E[y2(k)]最小,也就是E[(z(k)-z′(k))2]最小,E[(y(k)-s(k))2]也最小,即自适应抵消系统的输出信号y(k)与有用信号s(k)的均方差最小。
在理想状态下,z(k)= z′(k),则y(k)= s(k),这时自适应滤波器自动调节其脉冲响应,将c(k)加工成z(k),与原始输入信号d(k)中的z(k)相减,使输出信号y(k)由噪声完全被抵消,而等于有用信号s(k)。
可以证明,自适应滤波器能完成上述任务的必要条件为:参考输入信号x(k)= c(k)必须与被抵消的信号(噪声)z(k)相关。
实际上,一个噪声抵消系统的情况比图2所示要复杂,这是因为输入还可能有一些独立噪声源[7](即与参考输入无关的噪声及干扰),如图3所示。
3 神经网络
思维学普遍认为,人类大脑的思维分为抽象(逻辑)思维、形象(直观)思维和灵感(顿悟)思维三种基本方式。
人工神经网络就是模拟人思维的第二种
y(k)
d(k)=s(k)+z(k)
x(k)=c(k)
原始输入
参考输入H(z)
∑
z′(k)
d(j) e(j)
y(j)
自适应数字滤波器X(j)
∑
图3 常见的自适应噪声抵消系统
方式。这是一个非线性动力学系统,其特色在于信息的分布式存储和并行协同处理[8]。虽然单个神经元的结构极其简单,功能有限,但大量神经元构成的网络系统所能实现的行为却是极其丰富多彩的。因此引入多层神经网络。
3.1多层前向神经网络的结构
目前得到广泛应用的多层前向人工神经网络是三层前向人工神经网络,它由输入层,隐层和输出层组成如图4所示。
图4 三层前向人工神经网络
在三层前向人工神经网络中,输入层中有n 个神经元,隐层中有m 个神经元,输出层有L 个神经元。输入到网络的信息是按照输入层、隐层、输出层的顺序一直传递到输出层,最后得到整个网络的输出。因此,整个网络叫做前向网络。
3.2反向传播学习算法的基本计算原理
反向传播算法(BP 算法)是训练人工神经网络的基本方法,现已得到了广泛的应用。
下面以输出层只含一个神经元的三层前向人
工神经网络为例,给出这种算法的基本计算原理和过程[9],其结构如图5所示:输入层中有n 个神经元,隐层中有m 个神经元,输出层神经元的输出,也就是整个网络的输出为y 。
图5 输出层中含有一个神经元的三层前向神经网络
隐层各神经元的输入分别是I i 。
1
,
1,2,,n
i i j i j j I W X i m θ==-=∑ (4)
公式(4)中设X i 为该神经元所接受的输入,W ij 为隐层中神经元i 与输入层神经元j 之间的连接权值,θi 为隐层神经元的阈值,选择Simoid 函数作为隐层神经元的激函数f( ),则隐层神经元的输出为O i 。
1
1i
i I O e -=
+ (5)
公式(5)中取输出层神经元的阈值为O ,输出层神经元的激发函数取线性函数则输出层神经元的输出即网络输出为y 。
1
m
i i
i y V O ==
∑ (6)
公式(6)中V i 为输出层神经元与隐含神经
元i 的连接权。
设一学习样本为(X 1p ,X 2p ,…;t p ),(p =1,2, …),p 为样本数,在给出网络向量的输出值y p ,对于样本p ,定义网络的输出误差为d p ,并定义误差函数为e p 。
p p p d t y =- (7)
21
()2
p p p e t y =
- (8) W ij
X n
X 2
X 1
…
… 隐层
输入层
输出层
y
V i
y 1
y L
W ij
…
…
…
X n
X 2
X 1
输入层 隐层
输出层
m (k )
y (k )
n (k )
信号源s (k )
∑
∑
噪声源c (k )
A (z )
∑
H (z )
e (k )
W 的值是随机给出的,因此,求得网络输出值y p 以后,公式(7)定义的误差比较大,也就是说网络的计算精度不高,在确定网络中隐层神经元数目m 的情况下,只能通过调整W 的值,以逐步降低误差d p 以提高网络的计算精度。下面给出根据d p 的信息调整W 的具体计算过程,在反向传播算法中,是沿着误差函数e p 随W 变化的负梯度向对W 进行修正的,设W 的修正值为△W 。
p e W W
η
??=-? (9)
公式(9)中η为学习率,取0~1间的数。
4噪声抵消系统的仿真
4.1 BP 网络模型建立
这里构造一个1-4-1型的BP 神经网络模型,隐层节点取4个,如图6所示。
本网络中的隐层变换函数为tansig 函数(正切S 型传递函数),它可以将神经元的输入范围(-∞,+∞)映射到(-1,+1),它是可微函数,非常适合于训练BP 的神经元。如果BP 网络的最后一层是Sigmiod 型神经元,那么整个网络的输出就限制在一个较小的范围内;如果是purelin (线性传递函数)型线性神经元,则整个网络的输出可以是任意值。
图6 BP 神经网络模型
4.2基于神经网络工具箱的BP 网络学习和训练
① 定义样本 t =0:0.01:15; y =randn (size (t )); yn=cos (y );
样本p 取y 的前50个数据,t 取yn 的前50个数据。
p =y (1:50); t =yn (1:50); ② 初始化BP 网络
[w1,b1,w2,b2]=initff (p,4,'tansig',1,'purelin
');
其中,p 为输入量,4、1为隐层和输出层的节点数,tansig 和purelin 分别为隐层和输出层的初始权值w1,w2,b1,b2。
w1=[ 1.2862 -1.2862 1.2862 -1.2862];
w2 =[ 0.6428 -0.1106 0.2309 0.5839];
b1 = [2.1832 1.4758 -0.2518 -2.6883] ;
b2 = [0.8436]; ③ BP 网络的训练
利用BP 学习规则训练前向神经网络,使其完成函数逼近,适量分类和模式识别,选择训练参数tp 并指示如何进行训练。
tp1=10;%指定两次更新显示的训练次数;
tp2=10000;%指定训练的最大次数; tp3=0.001;%误差平方和指标; tp4=0.01;%指定学习速率,即权值和阈值更新的比例;
tp =[tp1 tp2 tp3 tp4];
一旦训练达到最大的训练次数或网络误差平方和降低到误差之下,都会使网络停止学习。
④ 网络训练
[w1,b1,w2,b2,te ,tr ]=trainbp (w1,b1,'tansig ',w2,b2,'purelin ',p ,t ,tp );
函数利用单层权值失量w ,阈值量b 及转移函数成批训练网络,使当输入p 时,网络的输出为目标矢量t ,在这个环节将得到新的权值矢量w 和阈值b ,及训练的迭代次数te ,及记录网络训练过程的误差平方和行矩量tr 。
w1 =[ 0.7530 -0.8876 1.2686
tansig
purelin
-0.4171]
w2 =[ 1.3976 1.1918 -0.1075 1.1635 ]
b1 = [1.0990 1.3212 -0.3419 -3.0637]
b2 = [-0.0315]
⑤误差变化曲线:ploterr(tr,tp3);
如图7所示经过4000多次训练之后,误差逼近于0.001。从函数逼近曲线可以看出输出曲线非常逼近于目标曲线,证明训练后的网络具有较好的拟合性。
图7 误差变化曲线
⑥计算网络仿真输出,逼近结果
a=simuff(p,w1,b1,'tansig',w2,b2,'purelin');
plot([0:0.1:4.9],t,'+',[0:0.1:4.9],a,'-');
函数逼近曲线如图8所示。
图8 函数逼近曲线
4.3噪声抵消系统设计及动态仿真
BP网络构造如图9所示。
将图9所示结构封装,就变为如图10所示。如果用鼠标双击subsystem模块,就会显示其基本模型。
噪声抵消系统的构造如图11所示。
图9 BP网络构造
图10
subsystem
图11 噪声抵消系统
通过示波器可以观察到理想信号scope 如图12所示、有噪声信号scope1如图13所示、自适应噪声抵消信号scope2如图14所示,可以看出自适应噪声抵消系统起到了良好的效果。
噪声信号scope5如图17所示,经过影响的噪声信号scope4如图16所示,经过处理的噪声信号scope3如图15所示,可以看出图16与图15相近似。
图12 理想信号scope
图13 有噪声信号
scope1
图14 噪声抵消信号
scope2
图15 经过处理的噪声信号
Scope3
图16 经过影响的噪声信号
Scope4
图17 噪声信号Scope5
构造无subsystem 系统如图18所示。则scope2输出如图19所示,可以看出在没有自适应噪声抵消系统的情况下,处理得到的信
号是不正确的。
图18 无subsystem 系统
图19 无BP 网络模块对比噪声抵消输出scope2
5 结束语
本文概述了自适应噪声抵消和神经网络
的基本原理,研究了基于BP 神经网络的自适应噪声抵消,在考虑噪声抵消本身特性和外部影响因素的基础上,建立了噪声抵消预测模型,演示了如何利用MATLAB 里的神经网络函数对信号进行滤波处理。
实验结果表明基于神经网络的自适应噪声抵消系统达到了理想的效果,有效的滤除了噪声使信号保持了原来的特性,表明神经
网络在自适应噪声抵消领域的应用是非常有意义的。
参考文献 [1] Muhammad
Ridyanto
Hajimeno
Buhara .Improving recognition and Generalization capability
of
Back-propagation
using
a
self-organized Network Inspired by Immune Algorithm .Applied Soft Computing ,2005,(6):72-84. [2] Alexander
ST
.
Adaptive
Signal
Processing .Newyork :SPinger 一verlag ,1996.
[3]KangGS,FransenLJ.Presentation with an
Adaptive Noise Cancellation Filter.IEEE Trans,
CAS1997.
[4]张贤达.现代信号处理[M].北京:清华大学出
版社,1995.
[5]刘松强.数字信号处理系统及其应用[M].北京:
清华大学出版社,1999.
[6]何振亚.自适应信号处理[M].北京:科学出版
社,2002.[7]王华奎.张立毅.数字信号处理理论及应用二
[M].北京:高等教育出版社,2004.
[8]蒋宗礼.人工神经网络导论[M].北京:高等教
育出版社,2001.
[9]张立明.人工神经网络的模型及其应用[M].上
海:复旦大学出版社,2004.
LMS与RLS自适应滤波算法性能比较 马文民 【摘要】:介绍了自适应滤波器去除噪声的原理和从强噪声背景中采用自适应滤波提取有用信号的方法,并对最小均方(LMS, Least Mean Squares)和递推最小二乘(RLS, Recursive Least Squares)两种基本自适应算法进行了算法原理、算法性能分析。计算机模拟仿真结果表明,这两种算法都能通过有效抑制各种干扰来提高强噪声背景中的信号。检测特性相比之下,RLS 算法具有良好的收敛性能,除收敛速度快于LMS算法和NLMS算法以及稳定性强外,而且具有更高的起始收敛速率、更小的权噪声和更大的抑噪能力。 【关键词】:自适应滤波;原理;算法;仿真 引言: 自适应滤波是近30年以来发展起来的一种最佳滤波方法。它是在维纳滤波,kalman滤波等线性滤波基础上发展起来的一种最佳滤波方法。由于它具有更强的适应性和更优的滤波性能。从而在工程实际中,尤其在信息处理技术中得到广泛的应用。自适应滤波的研究对象是具有不确定的系统或信息过程。"不确定"是指所研究的处理信息过程及其环境的数学模型不是完全确定的。其中包含一些未知因数和随机因数。任何一个实际的信息过程都具有不同程度的不确定性,这些不确定性有时表现在过程内部,有时表现在过程外部。从过程内部来讲,描述研究对象即信息动态过程的数学模型的结构和参数是我们事先不知道的。作为外部环境对信息过程的影响,可以等效地用扰动来表示,这些扰动通常是不可测的,它们可能是确定的,也可能是随机的。此外一些测量噪音也是以不同的途径影响信息过程。这些扰动和噪声的统计特性常常是未知的。面对这些客观存在的各种不确定性,如何综合处理信息过程,并使某一些指定的性能指标达到最优或近似最优,这就是自适应滤波所要解决的问题。 在这几十年里,数字信号处理技术取得了飞速发展,特别是自适应信号处理技术以其计算简单、收敛速度快等许多优点而广泛被使用。它通过使内部参数的最优化来自动改变其特性。自适应滤波算法在统计信号处理的许多应用中都是非常重要的。 在工程实际中,经常会遇到强噪声背景中的微弱信号检测问题。例如在超声波无损检测领域,因传输介质的不均匀等因素导致有用信号与高噪声信号迭加在一起。被埋藏在强背景噪声中的有用信号通常微弱而不稳定,而背景噪声往往又是非平稳的和随时间变化的,此时很难用传统方法来解决噪声背景中的信号提取问题。自适应噪声抵消技术是一种有效降噪的方法,当系统能提供良好的参考信号时,可获得很好的提取效果。与传统的平均迭加方法相比采用自适应平均处理方法还能降低样本数量。 1自适应滤波器的基本原理 所谓的自适应滤波,就是利用前一时刻以获得的滤波器参数的结果,自动的调节现时刻的滤波器参数,以适应信号和噪声未知的或随时间变化的统计特性,从而实现最优滤波。自适应滤波器实质上就是一种能调节其自身传输特性以达到最优的维纳滤波器。自适应滤波器不需要关于输入信号的先验知识,计算量小,特别适用于实时处理。 由于无法预先知道信号和噪声的特性或者它们是随时间变化的,仅仅用FIR和IIR两种具有固定滤波系数的滤波器无法实现最优滤波。在这种情况下,必须设计自适应滤波器,以跟踪信号和噪声的变化。 自适应滤波器的特性变化是由自适应算法通过调整滤波器系数来实现的。一般而言,自适应滤波器由两部分组成,一是滤波器结构,二是调整滤波器系数的自适应算法。 自适应噪声抵消系统的核心是自适应滤波器,自适应算法对其参数进行控制,以实现最佳滤波。不同的自适应滤波器算法,具有不同的收敛速度、稳态失调和算法复杂度。根据自
LMS算法在噪声抵消中的应用 冯振勇,王玉良 北京邮电大学信息工程学院,北京(100876) E-mail:fengzhenyong1984@https://www.doczj.com/doc/e617512720.html, 摘要:自适应噪声干扰抵消器是基于自适应滤波器原理的一种扩展。本文首先根据自适应LMS滤波器的设计理念介绍了噪声抵消器的原理,得出自适应抵消器只有参考输入噪声与原始输入噪声存在相关性,才能有效的抵消噪声的结论;在此基础上进行了稳定噪声抵消的求解,以单输入单输出维纳滤波器系统为例,通过滤波器的误差公式和转移函数求得维纳滤波器问题的无约束非因果解;随后利用LMS算法设计了自适应单信道噪声抵消器,根据前两步的分析,将自适应抵消器的参考输入信号谱函数分解,求得维纳解的最佳转移函数;最后通过MATLAB仿真实验证明了LMS算法在自适应滤波去噪中的优势,并对结果进行了分析。 关键词:LMS算法;自适应单信道噪声抵消器;自适应滤波 中图分类号:TN713 1. 引言 自适应噪声抵消器是利用自适应噪声抵消技术,从背景噪声中提取语音信号,以提高语音的清晰度。其目的是把信号中的噪声和语音信号进行有效地分离,降低环境噪声的影响。 自适应干扰对消是通过自适应过程加以控制的,它可以在信号很微弱或信号用常规的方法无法检测的噪声干扰场中,将从一个或多个传感器所取得的参考输入加以过滤,并从包含信号和噪声的原始输入中减去,最后结果是原始信号中的噪声或干扰被衰减或消除,而保留了有用信号[1]。噪声干扰对消可完成时间域(频域)的滤波,也可实现空间域的滤波,因此自适应干扰对消具有广泛的应用范围。例如消除心电图中的电源干扰、检测胎儿心音时滤除母亲的心音及背景干扰、在有多人讲话的场合下提取某人的讲话、作为天线阵列的自适应旁瓣对消器。 2. 自适应噪声抵消器的设计 理论上讲,自适应噪声干扰抵消器是基于自适应滤波器原理的一种扩展。简单的说,把 d n改为信号加噪声干扰的原始输入端,而它的输入端改自适应滤波器的期望信号输入端() 为噪声干扰端,有横向滤波器的参数调节输出以将原始输入端的噪声抵消掉,这时误差输出就是有用信号了。下面从噪声抵消器的原理介绍,求解过程和设计三方面进行说明。 2.1 噪声抵消器的原理 图1 噪声低消器的原理图
自适应噪声抵消LMS 算法Matlab 仿真 传统的宽带信号中抑制正弦干扰的方法是采用陷波器(notch filter),为此我们需要精确知道干扰正弦的频率.然而当干扰正弦频率是缓慢变化时,且选频率特性要求十分尖锐时,则最好采用自适应噪声抵消的方法.下图是用一个二阶FIR 的LMS 自适应滤波器消除正弦干扰的一个方案。 1) 借助MATLAB 画出误差性能曲面和误差性能曲面的等值曲线; 2) 写出最陡下降法, LMS 算法的计算公式(δ=0.4); 3) 用MATLAB 产生方差为0.05,均值为0白噪音S(n),并画出其中一次实现的波形据2)中的公式,并利用3)中产生的S(n),在1)中的误差性能曲面的等值曲n 的值曲线上叠加画出LMS 法时100情况确定,一般选取足够大以使算法达到基) (n y 宽带信号+正弦干扰 0()()() y n S n N n =+图; 4) 根线上叠加画出采用最陡下降法, LMS 法时H(n)的在叠代过程中的轨迹曲线。 5)用MATLAB 计算并画出LMS 法时 随时间变化曲线(对 应S(n)的某一次的一次实现)和e(n)波形;某一次实现的结果并不能从统计的角度反映实验的结果的正确性,为得到具有统计特性的实验结果,可用足够多次的实验结果的平均值作为实验的结果。用MATLAB 计算并画出LMS 法时J(n)的100次实验结果的平均值随时间n 的变化曲线。 6)用MATLAB 计算并在1)中的误差性能曲面的等次实验中的H(n)的平均值的轨迹曲线; (在实验中n=1,,…..N,N 的取值根据实验本收敛) 01(),(0)0.05 2()sin( 16102()sin() 16ss S n r N n n N n n πππ ==+是均匀分布的白噪音不相关 和)(),()(10n N n N n S ) (n x x 1()() ) (n e n N n =
自适应噪声抵消器的发展与现状 1自适应滤波器简介 2自适应滤波器的发展与研究状况 1自适应滤波器简介 滤波器是电子设备的最基本的部件,人们对其己进行了广泛的研究。Winner 奠定了关于最佳滤波器的基础。维纳WImeIr根据最小均方误差准则求得了最佳线性滤波器的参数。这种滤波器被称为维纳滤波器,它获得了极其广泛的应用。在Winner研究的基础上,人们还根据最大输出信噪比准则等,获得了其他的最佳线性滤波器。要实现维纳滤波,要求(1)输入过程是广义平稳的;(2)输入过程的统计特性是己知的。根据其他最佳准则的滤波器亦有同样要求。然而,由于输入过程取决于外界的信号、干扰环境,这种环境的统计特性常常是未知的、变化的,因而不能满足上述两个要求。这就促使人们研究自适应滤波器。自适应滤波器是在输入过程的统计特性未知时,或输入过程的统计特性变化时,能够调整自己的参数,以满足某种最佳准则,即具有“学习”和“跟踪”能力,包括时域和空域滤波等。自适应噪声抵消的最早的一些工作,是1957年到1960年间,Howesll 和APPlbe~以及他们的同事通用电气公司完成的。他们使用取自一个辅助天线的参考输入和一个简单的两权的自适应滤波器,设计并制造了天线旁瓣对消系统。在这些早期年代里,只有少数人对自适应系统感兴趣。而多权自适应滤波器的研制则刚刚开始。1959年,Widorw和Hoff在斯坦福大学证明了最小均方(LMS)自适应算法和模式识别方案,称之为Adatni(代表“自适应线性门逻辑元件”)。就在当时,罗森布拉特在康奈尔宇航实验室建造了他的模拟人类视觉神经控制系统的电子设备。在苏联,莫斯科自动学和遥控力学研究所的艾日曼及其同事们,也在制造一种自动梯度搜索机器。英国,.D加布尔和他的助手们则在研制自适应滤波器。在六十年代初期和中期,关于自适应系统的工作加强了。文献中出现了数百篇关于自适应控制、自适应滤波和自适应信号处理的文章。自适应滤波在数字通信中的重要商业应用是这一时期勒凯在贝尔实验室的工作形成的。自适应
福建电脑 2010年第 9期 自适应噪声抵消器的 MATLAB 设计与实现 成利香 1,2, 张桂新 1 (1. 中南大学信息科学与工程学院湖南长沙 4100002. 湖南工学院湖南衡阳421002 【摘要】:本文简述了自适应滤波的基本原理 , 并给出了自适应滤波噪声抵消的一般系统模型 , 重点研究了 LMS 自适应算法。完成了在 MATALB 下的仿真 , 并通过设置不同参数 , 对其性能做了分析。【关键词】:自适应滤波 ; 噪声抵消 ; LMS 算法 ; MATLAB 0、引言 自适应滤波自适应滤波器不需要输入信号的先验知识 , 它是利用前一时刻已经获得的输入信号获参量 , 调节现时刻的滤波参数 , 以适应信号和噪声未知的或随时间变化的统计特性 , 从而实现最优维纳滤波。自适应滤波自 Widrow 等提出以来 , 因其计算量小 , 易于实现等特点 , 得到了各领域的广泛应用。 1、自适应滤波器噪声抵消的原理 1. 1自适应滤波器噪声抵消的基本原理 一个自适应滤波器包括两个不同的部分 :一个是具有可调系数的数字滤波器 , 一个是用于调整或改变滤波系数的自适应算法。图 1给出了自适应滤波器作为噪声对消的原理框图。 图 1自适应滤波器作为噪声对消的原理框图 噪声消除的主要目的是对被污染信号中的噪声的最优估计 , 以获得信号的最优估计。其中 x(n表示输入信号 ; y(n表示被污染的信号 , 包括所希望的信号和噪声
信号 ; r(n表示被污染信号的某种测量 , 与叠加的噪声信号相关 ; d (n:表示叠加噪声信号的估计值 ; e(n; 表示作为输出的信号 , 一是作为希望信号 x(n的估计输出值 , 二是用于调整自适应滤波器的参数。利用此输出值通过某种自适应算法对滤波器参数进行调整 , 最终获得噪声最优估计值 , 当输入信号的统计特性发生变化 , 自适应数字滤波器能够跟踪这种变化 , 自动调整参数 , 使滤波器性能重新达到最佳。 1.2自适应算法的研究 根据自适应算法优化准则的不同 , 其算法大致分为两大类 , 一是最小均方算法 (LMS , least -mean -square , 二是递归最小二乘法 (RLS 。 LMS 算法是基于最小均方误差准则的维纳滤波器和最陡下降法提出的 , 是对梯度下降算法的近似简化。算法的基本思想是 :调整滤波器自身的参数 , 使滤波器的输出信号与期望输 出信号之间的均方误差最小 , 系统输出为有用信号的最佳估计。其算法推导如下 : 其中μ为固定步长因子 , 是一常数。 显然上面的算法不需要事先知道信号的统计量 (即相关量 R 和 P , 而使用他们的瞬时估计代替算法获得的权重只是一个估计值 , 但随着调节权重 , 这些估计值逐渐提高 , 滤波器也越来越适应信号特性 , 最终权值收敛 , 收敛的条件为 其中λmax 是输入数据方差矩阵的最大特征值。下面给出基本 LMS 算法实 现的步骤 : 1 初始化 , 令所有权重为任一固定值 , 或为 0; 2 计算滤波输出 3 计算估计误差 4 更新下一时刻的滤波器的权重 3、自适应噪声抵消器的 MATLAB 的设计与实现 max
第9卷 第19期 2009年9月167121819(2009)1925835205 科 学 技 术 与 工 程 Science Technol ogy and Engineering Vol 19 No 119 Oct .2009 Ζ 2009 Sci 1Tech 1Engng 1 自适应噪声消除算法的性能比较与仿真 江清潘 常太华3 朱红路 马 军 1 (华北电力大学控制科学与工程学院,北京102206;湖北省汉江河道管理局1,潜江433100) 摘 要 在信号处理中,噪声往往是非平稳和随时间变化的,传统方法很难解决噪声背景中的信号提取问题。通过对自适应噪声消除原理的研究,介绍了基于参考信号和基于预测原理的两种自适应噪声消除(ANC,Adap tive Noise Cancellati on )方法,分析对比了基于最小均方(L M S,LeastMean Squares )、递推最小二乘(RLS,Recursive Least Squares )和平方根自适应滤波(QR -RLS,recursive least squares based on QR decompositi on )三种噪声消除算法的性能。仿真结果表明:这几种算法都能从高背景 噪声中有效地抑制干扰提取出有用信号,显示出了良好的收敛性能。相比之下,RLS 算法和QR -RLS 算法呈现出更快的收敛速度、更强的稳定性和抑噪能力。 关键词 自适应噪声消除 自适应滤波器 噪声中图法分类号 TP27412; 文献标志码 A 2009年6月15日收到国家自然科学基金(50776030)资助 第一作者简介:江清潘(1986—),男,福建三明人,硕士在读,研究方向:电力生产过程建模、燃烧优化。E 2mail:jqpgg m @g mail 1com jqphd2007@yahoo 1cn 。 3 通信作者简介:常太华(1951—),女,山西榆社人,教授,研究方向: 信息融合及检测新技术。 在信号处理领域中噪声消除是一个非常重要的问题,对噪声环境中系统的正常工作有着很大的影响。隐藏在有用信号中的背景噪声往往是非平稳且随时间变化的,信号和噪声的统计特性往往无法知晓,而且背景噪声中的有用信号往往微弱而不稳定,此时采用传统方法很难解决噪声环境中的信号提取问题 [1] 。近年来自适应噪声消除(ANC )系 统成为消除噪声的研究热点,利用自适应滤波器具有在未知环境下良好运行并跟踪输入统计量随时间变化的能力,通过不断调整抽头权系数来适应发生变化的信号和噪声的统计特性,达到消除噪声干扰的目的 [2] 。 根据噪声知识的了解情况,ANC 系统可采用基于参考信号和基于预测原理的两种噪声消除方法。在噪声相关知识足够了解的情况下可选取一个与噪声信号相关的参考信号进行噪声干扰对消。在 噪声相关知识了解不够充分时可根据自适应滤波器的预测原理,利用噪声信号的时间不相关性来达到噪声消除的目的。 ANC 系统的核心是自适应滤波器,通过自适应 算法对滤波器权系数进行调整以实现最佳滤波。不同的自适应滤波器算法具有不同的收敛速度、稳态失调和算法复杂度,基于上述两种噪声消除方法对比分析了基于L MS 、RLS 和QR -RLS 三种算法的噪声消除效果。仿真结果表明,这几种算法都能从高背景噪声中提取有用信号。相比之下,在基于参考信号的方法中,RLS 算法体现出了更好的收敛性能和抑制干扰的能力。在基于预测的消噪方法中,QR -RLS 算法呈现出了更快的收敛速度、更强的稳 定性和抑噪能力。 1 自适应噪声消除原理及算法 111 噪声消除原理 自适应滤波器噪声消除系统是以噪声干扰为处理对象,将其抑制或者进行衰减,以提高输出端的信噪比质量。分析了基于参考信号和基于预测原理的两种自适应噪声消除方法。
2009年11月第”期危子测斌 ELECTRoNICTEsT Nov.2009 No.1/ 基于M棚,AB的自适应噪声抵消器的设计与实现 徐梅花,王福明 (中北大学现代教育技术与信息中心太原030051) 摘要:阐述了自适应噪声抵消(ANC)技术的基本原理,基于自适应滤波器的原理,设计了自适应噪声抵消器; 在对自适应滤波器相关理论研究的基础上,重点研究了自适应噪声抵消器的核心——I。MS自适应滤波算法。 在MATLAB中的Simulink下,建立了自适应噪卢抵消器的模型,并通过设置不同的参数进行仿真,结果表明系 统能够有效地从噪声中恢复出原始信号。最后对系统进行了性能分析,给出了自适应噪声抵消系统在实际应用 中选取参考信号的要求。 关键词:自适应滤波;噪声抵消;LMS;MATI。AB仿真 中图分类号:TN911.4文献标识码:A Designandrealizationofadaptivenoisecancellerbasedon MATLAB XuMeihua,WangFuming (ModernEducationTechnology&InformationCenterofNorthUniversityofChina。Taiyuan030051.China) Abstract:ThispaperelaboratedthebasictheoryofAdaptivenoisecancellationtechnology(ANC),designedAdaptivenoisecancellerbasedonadaptivefilter;Afterstudyingtherelated theoryofadaptivefilter,thecoreofadaptivenoisecaneeller-LMSadaptivefilteringalgorithmis researchedemphatically.UndertheSimulinkofMATI。AB,builtthemodelofadaptivenoise cancellerandsimulatedthroughinstallingdifferentparameters.Theresultsdeclaredthesystem canrecoveroriginalsignalfromnoiseeffectively.Finally,analyzedthefunctionofsystem,and giventhesystemrequirementsofselectedreferencesignalsinthepracticalapplication. Keywords:Adaptivefiltration;Noisecancellation;LMS;MATLABsimulation O引言 基于自适应噪声抵消技术(AdaptiveNoiseCan—cellation,ANC),作为在强噪声背景下通信的一种主要语音增强方法,把信号中的噪声和语音信号进行有效的分离,降低或抑制环境噪声的影响,有效提高了语音的清晰度。自Widrow等于1967年提出自适 电量塑gi墓 ELECTRON『GTEST应滤波概念以来,因其计算量小、易于实现等优点,发展极为迅速。目前广泛应用于通信、语音信号处理、图像处理、模式识别、系统辨识及自动控制等领域,是目前最活跃的研究领域之一。自适应噪声抵消技术和其他语音增强方法相比,突出之处就是该方法不基于任何信号模型和对信号的统计特性无特殊要求,故其应用范围相当广泛。 早在1975年,美国斯坦福大学的Widrow等 型 万方数据
前言 自适应信号处理的理论和技术经过40 多年的发展和完善,已逐渐成为人们常用的语音去噪技术。我们知道,在目前的移动通信领域中,克服多径干扰,提高通信质量是一个非常重要的问题,特别是当信道特性不固定时,这个问题就尤为突出,而自适应滤波器的出现,则完美的解决了这个问题。另外语音识别技术很难从实验室走向真正应用很大程度上受制于应用环境下的噪声。 自适应滤波的原理就是利用前一时刻己获得的滤波参数等结果,自动地调节现时刻的滤波参数,从而达到最优化滤波。自适应滤波具有很强的自学习、自跟踪能力,适用于平稳和非平稳随机信号的检测和估计。自适应滤波一般包括3个模块:滤波结构、性能判据和自适应算法。其中,自适应滤波算法一直是人们的研究热点,包括线性自适应算法和非线性自适应算法,非线性自适应算法具有更强的信号处理能力,但计算比较复杂,实际应用最多的仍然是线性自适应滤波算法。线性自适应滤波算法的种类很多,有RLS自适应滤波算法、LMS自适应滤波算法、变换域自适应滤波算法、仿射投影算法、共扼梯度算法等[1]。 其中最小均方(Least Mean Square,LMS)算法和递归最小二乘(Recursive Least Square,RLS)算法就是两种典型的自适应滤波算法,它们都具有很高的工程应有价值。本文正是想通过这一与我们生活相关的问题,对简单的噪声进行消除,更加深刻地了解这两种算法。我们主要分析了下LMS算法和RLS算法的基本原理,以及用程序实现了用两种算法自适应消除信号中的噪声。通过对这两种典型自适应滤波算法的性能特点进行分析及仿真实现,给出了这两种算法性能的综合评价。
LMS及RLS自适应干扰抵消算法的比较 1 绪论 1.1课题背景与意义 自适应噪声抵消( Adaptive Noise Cancelling,ANC) 技术是自适应信号处理的一个应用分支,其主要理论和框架由B.Widrow等在1975 年提出,经过三十多年的丰富和扩充,现在已经应用到了很多领域,比如车载免提通话设备,房间或无线通讯中的回声抵消( AdaptiveEcho Cancelling,AEC) ,在母体上检测胎儿心音,机载电子干扰机收发隔离等,都是用自适应干扰抵消的办法消除混入接收信号中的其他声音信号。 自适应干扰抵消中的关键技术是自适应滤波器,自适应滤波器的实现是影响系统收敛速度、噪声抵消效果的关键部分。自适应滤波器(Adaptive Filter) 的基本目标是以某种方式调整其参数,让滤波器的输出尽可能的让包含某个特定参考信号的目标函数最小化。调整滤波器参数的方法就是自适应算法(Adaptive Algorithm),自适应滤波算法的研究是当今自适应信号处理中最为活跃的研究课题之一。寻求收敛速度快、计算复杂性低、数值稳定性好的自适应滤波算法是研究人员不断努力追求的目标。目前两种典型的自适应滤波算法是最小均方(Least Mean Square,LMS)算法和递归最小二乘(Recursive Least Square,RLS)算法。 在近几十年中,LMS类算法已广泛应用于干扰抵消、信道均衡、系统识别以及阵列信号处理之中。Widrow等人提出的最小均方(Least Mean Square,LMS)算法就是一种以期望响应和滤波器输出信号之间误差的均方值最小为原则。LMS算法的优点是结构简单、鲁棒性强,其缺点是收敛速度很慢。基于最小二乘准则,递归最小二乘(Recursive Least Square,RLS)算法确定自适应滤波器的权系数向量使估计误差的加权平方和最小。RLS算法对输入信号的自相关矩阵的逆进行递推估计更新,收敛速度快,其收敛性能与输入信号的频谱特性无关。但是,RLS算法的计算复杂度很高,所需的存储量极大,不利于适时实现,倘若自相关矩阵的逆失去了正定特性,这还将引发算法发散。 1.2国内外研究发展状况 自适应滤波的基本理论通过几十年的发展已日趋成熟,近十几年来自适应
理论与算法 电 子 测 量 技 术 ELECT RON IC M EASU REM ENT T ECH NOLOGY 第33卷第3期 2010年3月 基于RLS算法的自适应噪声抵消系统研究 石 鑫1 李春龙1 李 昊2 (1.海军装备部 西安 710043; 2.西北工业大学航海学院 西安 710072) 摘 要:介绍了一种基于RL S算法的自适应噪声对消系统,说明了噪声对消系统的原理以及RL S算法的步骤与流程。通过实例仿真,得到了基于RL S算法的自适应噪声抵消系统仿真图。分析仿真结果得出,在单频干扰与宽带噪声干扰两种情况下,RL S自适应滤波器都能很好地消除干扰得到有用信号。证实了在通信语音信号处理中,用基于RL S算法的自适应噪声对消系统可以消除语音噪声,提高语音通信的信号质量。 关键词:自适应噪声对消;RL S算法;M AT L AB仿真 中图分类号:T N912.3 文献标识码:A Adaptive noise canceling system based on RLS algorithm Shi X in1 L i Chunlong1 L i H ao2 (1.Naval E qu ipmen t Department,Xi an710043;2.College of M arine En gineering North w estern Polytechnic U nivers ity,Xi an710072) Abstract:Int roduce the theor y of the adaptiv e no ise canceling sy st em based on RL S alg or ithm,and also present the com puter simulatio n results.T he simulatio n results indicate that the RL S adaptiv e noise canceling system can cancel sing le and bro ad band fr equency interfer ential.So it can be used to cancel the noise invo lved in the sound to impro ve sig nal quality in the communicatio n sig nal pro cessing. Keywords:adaptiv e no ise canceling;RL S alg or ithm;M AT L AB simulatio n 0 引 言 自适应噪声对消系统在现代通信信号处理中被广泛应用。例如飞机在高空飞行过程中飞行员实时与地面导航台保持联络,在这个通信过程中飞行员的语音传送到导航台的同时机舱内的各种噪声也随着语音一并被传送。这样各种环境噪声就会对通信造成很大影响。当噪声很大时,有用的语音信号会被噪声所淹没,这样会严重影响通信。这时可在机舱中安装一个传声器来接收机舱中的各种噪声信号,把这个信号与语音信号同时发回地面。然后用自适应噪声对消系统来处理语音信号就可以将语音中的噪声消除,从而提高通信质量。已有的研究[1 8]中自适应噪声对消系统都是基于LMS算法进行,这在环境噪声是平稳随机信号时效果明显。当环境噪声不是平稳随机信号时,LM S算法很难自适应的跟踪统计特性变化的外界噪声干扰,因而其收敛效果一般。本文提出的基于RLS算法的自适应噪声对消系统克服了上述缺点,在非平稳环境下可以取得较满意的效果。 1 自适应噪声抵消系统 如图1所示自适应噪声抵消系统原理框图[1]。在图1中,原始输入信号d(n)包括了有用信号s(n)与噪声v(n)。参考输入信号x(n)是与噪声v(n)相关的信号。 参考信号通过自适应滤波器后的信号变为v1(n)。由图可以看出自适应噪声抵消系统的输出为: e(n)=s(n)+v(n)-v1(n)(1) 图1 自适应噪声抵消系统框图 对式(1)两边取平方: e2(n)=s2(n)+[v(n)-v1(n)]2+2s(n)[v(n)-v1(n)](2)对式(2)两边取数学期望,假定s(n)与v(n)及v1(n)不相关,且都是统计平稳信号。故: E[e2(n)]=E[s2(n)]+E[v(n)-v1(n)]2(3) 由于E[s2(n)]与滤波器的调节无关,如果调节自适应滤波器使得E[e2(n)]最小,也就是E[v(n)-v1(n)]2最
基于神经网络的自适应噪声抵消 摘要:噪声抵消技术是信号处理的主要问题之一。基于神经网络的自适应噪声抵消技术是一种能够很好的消除未知噪声源噪声影响的信号处理技术,克服了传统自适应噪声抵消技术的不足。本文通过对误差反向传播学习算法的多层前向人工神经网络的分析研究,结合传统的自适应噪声抵消系统的基本原理,建立了基于人工神经网络的自适应噪声抵消器,经过基于MA TLAB仿真实验,证明它具有较强的噪声滤除能力。 关键词:自适应滤波;噪声抵消;神经网络 Adaptive Noise CancellationTechnology Based on Neural Network Abstract:Noise cancellation technology is one of the major problems of signal processing. Adaptive noise cancellation technology based on neural network is a very good to eliminate noise effects of unknown signal processing technology, overcome the traditional adaptive noise cancellation of technology. This design,Through the back-propagation learning algorithm of multilayer feedforward neural network analysis and research, combining traditional adaptive noise cancellation system of basic principle, Established a adaptive noise cancellation based on artificial neural network, after simulation experiments based on the Matlab prove it has strong noise filtering ability. Keywords: adaptive filter;noise cancellation;neural network 1 引言 在工程实际中,经常会遇到强噪声背景中的微弱信号检测问题。在信号的传播路径中以及在信号处理过程中,都会引入噪声。噪声的引入影响了对真实信号的处理。有时候,较强的噪声会“遮盖”了信号,从而难以得到准确、稳定的真实信号。噪声对信号的污染在绝大多数情况下是不可避免的,因而,对噪声的消除和抑制是信号处理中极其重要的工作。通常实现最优滤波的滤波器为维纳滤波器与卡尔曼滤波器。它们均要求已知信号和噪声的先验知识,但在许多实际应用中往往无法预先得知。为此,发展了自适应滤波器,1965年美国斯坦福大学建成了第一个自适应噪声抵消(ANC)系统[1],随着计算机技术与集成电路技术的进步,新的自适应算法不断涌现出来,自适应噪声抵消在理论和应用上都得到了很大发展。如果滤波器的输入和输出具有非线性的映射关系,那么对应的滤波器称为非线性滤波。生活中在许多的实际信号里含有系统非线性引起的噪声或者存在非高斯噪声等,因而研究非线性滤波显得非常重要。因此引入基于神经网络的自适应噪声抵消技术[2]。 自1986年开始,神经网络随着反向传播(BP)算法的出现而得到复兴,此后对于神经网络的研究再度掀起高潮。由于神经网络具有高度并行性、很强的非线性、变换能力和学习能力,因此具有很大的应用潜力,也为自适应非线性滤波器提供了一种全新的思路和方法。其中,激活函数为Simoid的多层前向神经网络能够以任意精度实现非线性函数逼近[3],所以可用BP神经网络组成非线性自适应滤波器。通过将滤波器的误差信号与神经网络中能量函数对应起来,可实现神经网络自适应滤波器[4]。 2 自适应噪声抵消 滤波是现代通信和控制工程中常用的信号处理方法之一,所谓滤波,就是通过对一系列带有误差的实际测量数据进行处理来滤除信号中的干扰,从而尽可能地恢复一个被噪声干扰了的信息流的问题。滤波的种类很多,最简单的滤波器是权系数固定的线性滤波器。为了提高滤波性能,滤波的权系数(传
自适应噪声抵消器研究背景和国内外现状 1背景和选题依据 2国内外研究现状和发展动态 在信号的传播路径中以及在信号处理过程中,都会引入噪声。噪声的引入影响了对真实信号的处理,有时候,较强的噪声会“遮盖”了信号,从而难以得到准确、稳定的真实信号。噪声对信号的污染在绝大多数情况下是不可避免的,因而,对噪声的消除和抑制是信号处理中极其重要的工作。自适应噪声抵消系统具有很强的噪声抑制能力,可将原始输入信号中噪声全部或部分地抵消,而对信号几乎不产生畸变,近年来应用十分广泛。 设计普通的维纳和Kalman滤波器,要求已知关于信号和噪声统计特性的先验知识。但在许多情况下人们并不知道或知道甚少,某些情况下这些统计特性还是时变的。处理这类信号就需要采用自适应滤波器。 自适应滤波的研究对象是具有不确定的系统或信息过程。这里的“不确定性”是指所研究的处理信息过程及其环境的数学模型不是完全确定的。其中包含一些未知因素和随机因素。 任何一个实际的信息过程都具有不同程度的不确定性,这些不确定性有时表现在过程内部,有时表现在过程外部。从过程内部来讲,描述研究对象即信息动态过程的数学模型的结构和参数是设计者事先并不一定能确切知道的。作为外部环境对信息过程的影响,可以等效地用扰动来表示。这些扰动通常是不可测的,它们可能是确定性的,也可能是随机的。此外,还有一些测量噪音也以不同的途径影响信息过程。这些扰动和噪声的统计特性常常是未知的。面对这些客观存在的各式各样的不确定性,如何综合处理该信息过程,并使得某一些指定的性能指标达到最优或近似最优,这就是自适应滤波所要解决的问题。 自适应噪声抵消系统的核心是自适应滤波器的设计,而设计自适应滤波器的关键是自适应算法及其实现。自适应算法要具有好的“自学习”和“跟踪”能力,而且运算量不能太大,以便能利用该算法设计出实时处理系统。 1975年,Widraw和Hoff等人做了一个模拟机舱噪声问题的实验,提出了最小均方误差(LMS)算法,这是一种很有用且很简单的自适应滤波算法。