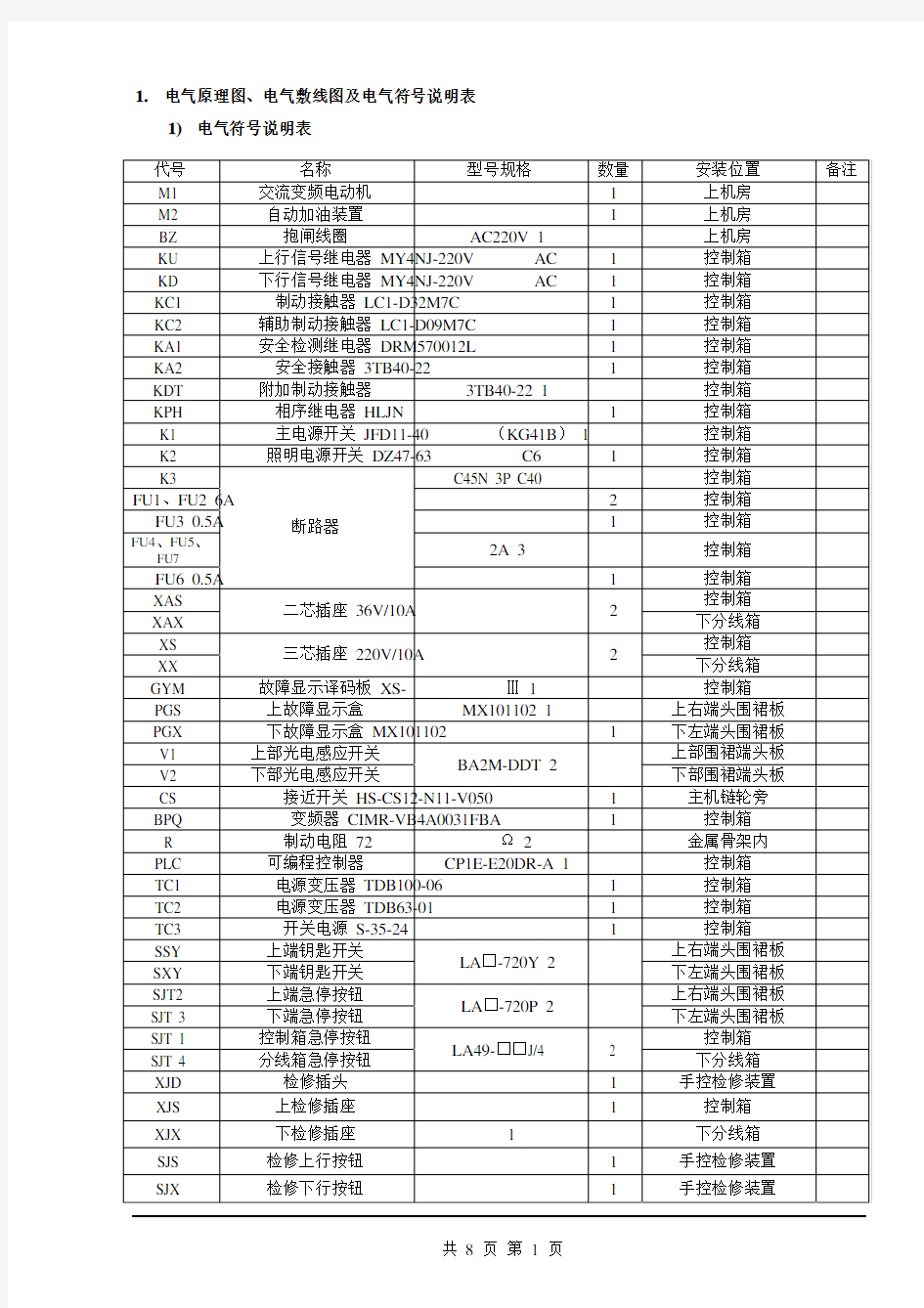
1. 电气原理图、电气敷线图及电气符号说明表
1) 电气符号说明表
代号 名称 型号规格 数量安装位置 备注M1 交流变频电动机 1 上机房 M2 自动加油装置 1 上机房 BZ 抱闸线圈 AC220V 1 上机房 KU 上行信号继电器 MY4NJ-220V AC 1 控制箱 KD 下行信号继电器 MY4NJ-220V AC 1 控制箱 KC1 制动接触器 LC1-D32M7C 1 控制箱 KC2 辅助制动接触器 LC1-D09M7C 1 控制箱 KA1 安全检测继电器 DRM570012L 1 控制箱 KA2 安全接触器 3TB40-22 1 控制箱 KDT 附加制动接触器 3TB40-22 1 控制箱 KPH 相序继电器 HLJN 1 控制箱 K1 主电源开关 JFD11-40(KG41B ) 1 控制箱 K2 照明电源开关 DZ47-63 C6 1 控制箱 K3 断路器
C45N 3P C40 控制箱 FU1、FU2 6A 2 控制箱 FU3 0.5A 1 控制箱 FU4、FU5、FU7
2A 3 控制箱
FU6 0.5A 1 控制箱 XAS 二芯插座 36V/10A 2
控制箱
XAX 下分线箱 XS 三芯插座 220V/10A 2
控制箱
XX 下分线箱 GYM 故障显示译码板 XS-Ⅲ 1 控制箱 PGS 上故障显示盒 MX101102 1 上右端头围裙板 PGX 下故障显示盒 MX101102 1 下左端头围裙板 V1 上部光电感应开关 BA2M-DDT 2
上部围裙端头板
V2 下部光电感应开关 下部围裙端头板 CS 接近开关 HS-CS12-N11-V050 1 主机链轮旁 BPQ 变频器 CIMR-VB4A0031FBA 1 控制箱 R 制动电阻 72Ω 2 金属骨架内 PLC 可编程控制器 CP1E-E20DR-A 1 控制箱 TC1 电源变压器 TDB100-06 1 控制箱 TC2 电源变压器 TDB63-01 1 控制箱 TC3 开关电源 S-35-24 1 控制箱 SSY 上端钥匙开关 LA □-720Y 2
上右端头围裙板
SXY 下端钥匙开关 下左端头围裙板 SJT2 上端急停按钮 LA □-720P 2
上右端头围裙板
SJT 3 下端急停按钮 下左端头围裙板 SJT 1 控制箱急停按钮 LA49-□□J/4
2 控制箱
SJT 4 分线箱急停按钮 下分线箱 XJD 检修插头 1 手控检修装置 XJS 上检修插座 1 控制箱 XJX 下检修插座
1 下分线箱
SJS 检修上行按钮 1 手控检修装置 SJX 检修下行按钮 1 手控检修装置
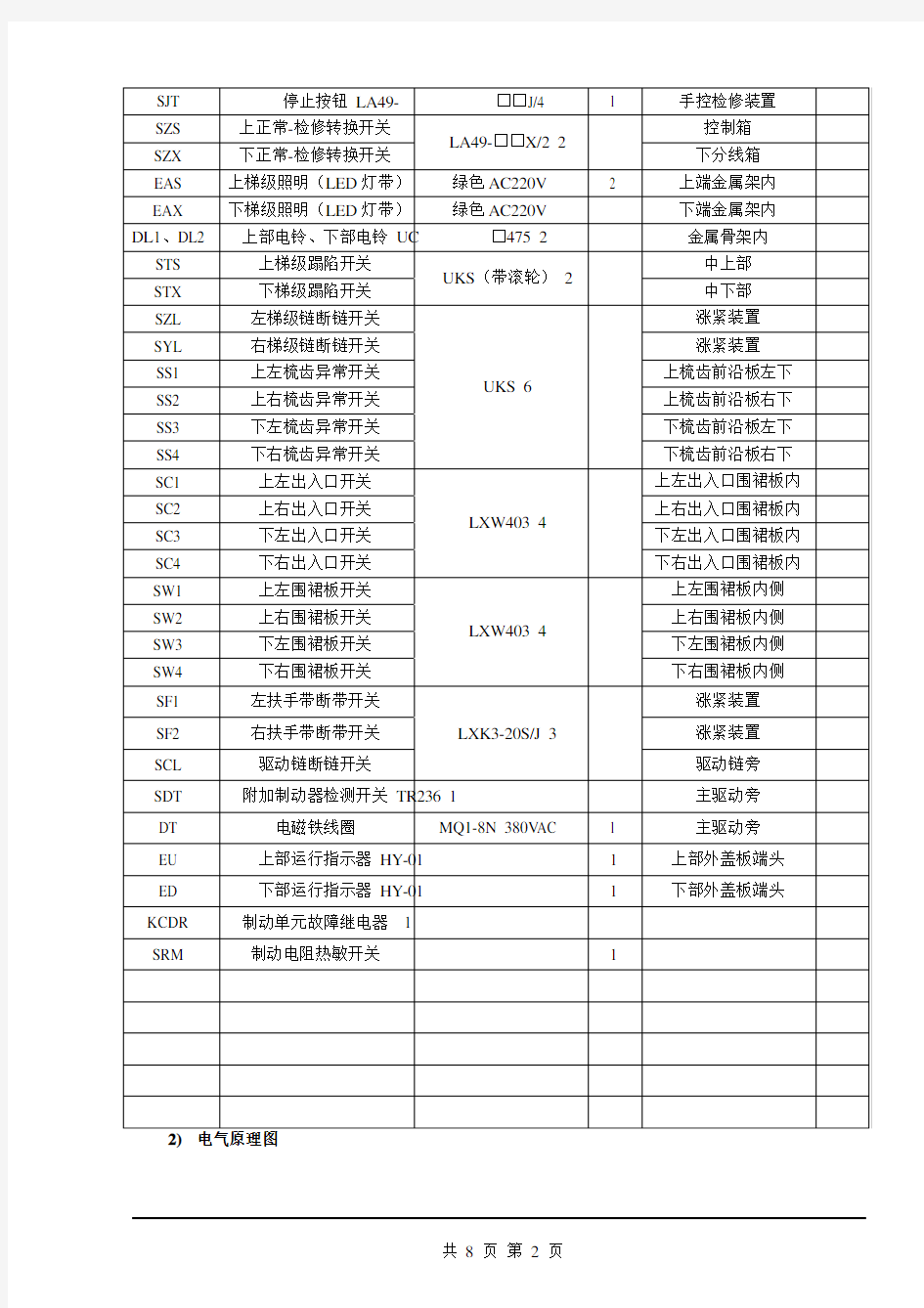
SJT 停止按钮 LA49-□□J/4 1 手控检修装置
SZS 上正常-检修转换开关 LA49-□□X/2 2 控制箱 SZX 下正常-检修转换开关 下分线箱 EAS 上梯级照明(LED 灯带)绿色AC220V
2
上端金属架内
EAX 下梯级照明(LED 灯带)
绿色AC220V 下端金属架内
DL1、DL2 上部电铃、下部电铃 UC □475 2 金属骨架内
STS 上梯级蹋陷开关 UKS (带滚轮) 2
中上部 STX 下梯级蹋陷开关 中下部 SZL 左梯级链断链开关 UKS 6
涨紧装置 SYL 右梯级链断链开关 涨紧装置
SS1 上左梳齿异常开关 上梳齿前沿板左下
SS2 上右梳齿异常开关 上梳齿前沿板右下
SS3 下左梳齿异常开关 下梳齿前沿板左下 SS4 下右梳齿异常开关 下梳齿前沿板右下 SC1 上左出入口开关 LXW403 4
上左出入口围裙板内
SC2 上右出入口开关 上右出入口围裙板内
SC3 下左出入口开关 下左出入口围裙板内
SC4 下右出入口开关 下右出入口围裙板内 SW1 上左围裙板开关 LXW403 4
上左围裙板内侧
SW2 上右围裙板开关 上右围裙板内侧
SW3 下左围裙板开关 下左围裙板内侧
SW4 下右围裙板开关 下右围裙板内侧 SF1 左扶手带断带开关 LXK3-20S/J 3 涨紧装置
SF2 右扶手带断带开关 涨紧装置
SCL 驱动链断链开关
驱动链旁
SDT 附加制动器检测开关 TR236 1 主驱动旁
DT 电磁铁线圈
MQ1-8N 380V AC
1
主驱动旁
EU 上部运行指示器 HY-01 1 上部外盖板端头 ED 下部运行指示器 HY-01 1 下部外盖板端头
KCDR 制动单元故障继电器 1
SRM 制动电阻热敏开关 1
2) 电气原理图
3)电气接线图
自动扶梯及自动人行道安装方案 1.基础放线 (1)确定标高线 按土建提供的+0.5m水平控制线(由士0.000向上返500mm作为基准标高)确定机尾、机头标高。 ( 2 )确定中心线根据平面布置图确定自动扶梯中心线,中心线确定之后确定机头、机尾承重钢板的位置。承重钢板必须于上下台阶内的钢筋焊接牢固,保持水平。 2.水平运输 ( 1 )确定运输路线扶梯设备一般堆放在施工现场附近的简易库房内,在起吊前应首先运到楼房内。根据现场勘察情况,扶梯在现场的存放地与安装地点的通道畅通,确定运输路线。 ( 2 )确定锚固点 在安装位置附近固定卷扬机,并有足够的强度,能承受水平移动扶梯桁架的拉力。为了提高运输效率,施工单位可制作滚轮小车,小车应采用橡胶万向轮。 ( 3 )桁架拼装 对分段运输至现场的自动扶梯,其金属桁架在吊装前必须拼装成整体。步骤如下: 1)将桁架的一段在地面放平固定。 2)将下一段桁架的连接螺栓孔与上段相应的螺栓孔对齐。 3)用扶梯生产厂家提供的专用螺栓紧固。
3. 桁架吊装 (1)如果现场基坑上部楼板设计有吊钩或允许在楼板上打洞吊装,可直接用倒链葫芦或卷扬机滑轮组吊装。 (2)如果现场具备使用吊车的条件,可以采取两台吊车同时起吊的方法。 (3)自制门形吊架吊装 一般单部扶梯自重约6t,每部设置4个吊点,每个吊点采用倒链葫芦或卷扬机滑轮组吊装就位,一般选择25 号工字钢做为门形吊架承重梁,门形吊架的立柱采用直径150mm的钢管,吊钩用直径25mm 的钢筋焊接,架体用不小于M16 的膨胀螺栓固定于平整地面,辅以 4 根缆风绳稳固架体。吊点设滑轮组与扶梯捆绑。 (4)桁架就位 桁架上下机头对准。 1)搁机梁牛腿与桁架之间的距离最大为50mm。 2)将扶梯桁架上下机头放在支撑板上(底板)。 3)在调整桁架之前在支撑板上放置垫片。 4)用两只螺栓将桁架支撑角钢调整至水平,同时桁架上下机头上部与地板水平。 5)用调整螺栓进行调节,视情况增减垫片,但垫片数量不得超过 5 片,若多于5 片时可用钢板代替适量的垫片 6)上下机头水平调整好后,移去调整螺栓。 7)扶梯桁架的校正:确保扶梯的中心线与基坑中心线重合。如 二台扶梯并列,其中心线之间的距离允许偏差+1mm。
摘要 自动扶梯是一种常年运载乘客的电力驱动设备,其运行状态常出现空载,大多数扶梯在空载时仍采用额定速度运行,具有耗能大,机械磨损严重等缺点,因此需要对自动扶梯进行节能运行改造。本设计就是根据自动扶梯节能使用的基本要求,设计一种以微机与变频器相结合控制自动扶梯节能运行的系统。工艺要求在保证舒适安全运行的条件下能够降低自动扶梯的能耗,延长自动扶梯的工作寿命。 自动扶梯控制系统的设计过程中主要包括电动机、热继电器、主电源开关、接触器、变压器、电线及电缆和制动电阻选型的基础上对于变频器驱动、电源控制、制动、故障显示、检修控制、速度检测、安全控制、照明控制等电路的设计。完成电路的设计后再对于主驱动轮传感器、梯级缺失传感器、扶手带测速传感器的安装,最后经过离线调试和在线调试,该系统实现了节能化运行。它实现了自动扶梯的电脑化控制,使自动扶梯更趋于智能化。 关键词:自动扶梯;微机;控制系统
ABSTRACT Escalator is a perennial passenger electric equipment, its running state often without load, Most of the escalator when the without load is still using the rated speed, High energy consumption, mechanical wear and serious shortcomings. So the escalators need for energy-saving operation transformation. This design is based on the use of energy-efficient escalator basic requirements to design a combination of computer and inverter control system of the escalator energy-saving operation. Process requirements to ensure the comfort and safety of operation conditions of the escalator could reduce power consumption and extend the working life of the escalator. Escalator control system design process includes on the basis of motors, thermal relays, the main power switch, contactors, transformers, wires and cables, and brake resistor selection to inverter drive, power control, braking, fault indication, access control, speed detection, security control, lighting control circuit design. After completion of the circuit design for the main drive wheel sensors, sensor missing rungs, handrail speed sensor installation. Finally, after offline debugging and debugging, the system realizes energy-saving operation. It implements the escalator computerized control, so that the escalator tends to be more intelligent. Keywords:Escalator; Microcomputer; Control System
电梯电气原理图 一.概述 不同的电梯,不论采用何种控制方式,总是按轿厢内指令,层站召唤信号要求,向上或向下起动,起行,减速,制动,停站。 电梯的控制主要是指对电梯原动机及 开门机 的起动,减速,停止,运行方向,指层显示, 层站召唤, 轿车内指令, 安全保护等指令信号进行管理。 操纵是实行每个控制环节的方式和 手段。 二.常规 继电器 控制的典型控制环节 1. 自动开关门的控制线路 自动 门机 是安装于轿厢顶上, 它在带动轿门启闭时, 还需通过机械联动机构带动层门与轿门 同步启闭。 为使电梯门在启闭过程中达到快, 稳的要求, 必须对自动门机系统进行速度调节。 当用小型 直流伺服电机 时, 可用电阻串并联方法。 采用小型交流转矩电动机时, 常用加涡流 制动器 的调速方法。 直流电机 调速方法简单, 低速时发热较少, 交流门机在低速时电机发热厉害,对三相电机的堵转性能及绝缘要求均较高。
2. 轿内指令和层站召唤线路 轿内操纵箱上对应每 一层楼 设一个带灯的按钮, 也称指令按钮。 乘客入轿厢后按下要去的目 的层站按钮,按钮灯便亮,即轿内指令登记,运行到目的层站后,该指令被消除,按钮灯熄灭。 电梯的层站召唤信号是通过各个楼层门口旁的按钮来实现的。信号控制或集选控制的电梯,除顶层只有下呼按钮,底层只有上呼按钮外,其余每层都有上下召唤按钮。 3. 电梯的选层定向控制方法 常用的机种如下; 手柄开关定向 井道分层 转换开关 定向 井道永磁开关与继电器组成的 逻辑电路 定向 机械选层器定向 双稳态磁开关和电子 数字电路 定向 电子脉冲式选层装置定向 4. 电梯的定向,选层线路 电梯的方向控制就是根据电梯轿厢内乘客的目的层站指令和各层楼召唤信号与电梯所处层楼位置信号进行比较, 凡是在电梯位置信号上方的轿厢内指令和层站召唤信号, 令电梯定上 行,反之定下行。 方向控制环节必须注意以下几点: 轿内召唤指令优先于各层楼召唤指令而定向。 电梯要保持最远层楼乘客召唤信号的方向运行 在司机操纵时, 当电梯尚未启动运行的情况下, 应让司机有强行改变电梯运行方向的可能性
贵州通和电梯有限公司 自动扶梯和自动人行道安装交底书 编制: 审核: 批准: 2015年11月20日发布 2015年11月20日实施
自动扶梯安装工程施工技术交底 扶梯主要用于公共交通设施:如火车站、商场、地铁、车站、机场等场合,产品符合NE115“自动扶梯和自动人行道制造和安装安全规范”的要求。 一.技术规格数据: 1.梯阶宽度: 600mm、1000mm 2.平地梯阶数: 2或3 3.倾角:自动扶梯30°,35°;自动人行道倾角不应超过12° 4.提升高度(h):最大10m(对于30°倾角)或6m(对于35°倾角) 5.输送能力(Q): Q=3600nv/t级 t级----一个梯级的平均深度或与此深度相等的踏板(胶带)的可见长度(m); n----每一梯级或每段可见长度为t级的踏板(胶带)上站立的人员数目; v----梯级(踏板或胶带)的运行速度(m/s)。 6.运行速度v : 国际规定:自动扶梯倾斜角α不大于30°时,其运行速度不应超过0.75m/s;自动扶梯倾斜角α大于30°,但不大于35°时,其运行速度不应超过0.50m/s。自动人行道的运行速度不应超过0.75m/s,但如果踏板或胶带的宽度不超过1.1m时,自动人行道的运行速度最大允许达到0.90m/s。 7.梯级(踏板或胶带): 围裙板与梯级、踏板或胶带任何一侧的水平间隙不应大于4mm,两边的间隙之和不应大于7mm。 当自动人行道的围裙板设置在踏板或胶带之上时,踏板表面与围裙板下端之间的垂直间隙不应大于4mm。 在自动人行道过渡曲线区段,踏板的前缘和相邻踏板的后缘啮合,其间隙不应大于8mm。 梯级间或踏板间的间隙在工作区段内的任何位置,从踏面测得的两个相邻梯级或两个相邻踏板之间的间隙不应大于6mm;在自动人行道过渡曲线区段,踏板的前缘和相邻踏板
操作规程编号:LX-FS-A77274 自动扶梯故障分析与维修方法标准 范本 In The Daily Work Environment, The Operation Standards Are Restricted, And Relevant Personnel Are Required To Abide By The Corresponding Procedures And Codes Of Conduct, So That The Overall Behavior Can Reach The Specified Standards 编写:_________________________ 审批:_________________________ 时间:________年_____月_____日 A4打印/ 新修订/ 完整/ 内容可编辑
自动扶梯故障分析与维修方法标准 范本 使用说明:本操作规程资料适用于日常工作环境中对既定操作标准、规范进行约束,并要求相关人员共同遵守对应的办事规程与行动准则,使整体行为或活动达到或超越规定的标准。资料内容可按真实状况进行条款调整,套用时请仔细阅读。 在自动扶梯的维修保养过程中,本人总结了以下工作经验,供大家参考。 1 速度监控装置有故障,自动扶梯不能正常运行 1.1 故障现象 有1台型号为GRF30-100的自动扶梯在安装竣工后,交付给客户使用过程中,自动扶梯不能正常运行,PLC(可编程控制器)数码显示出E—扶梯超速、欠速故障。引起这一故障的原因可能有以下情况:
①电源电压不稳定;②PLC已损坏;③脉冲接收器已损坏。通过详细分析和检测结果表明电源电压稳定、PLC和脉冲接收器完好无损,但发现安装在工作制动器上的脉冲接收器和磁头感应块错位及两者之间的垂直间隙过大。 1.2 分析原因 该自动扶梯的速度监控装置的工作原理是:在驱动主机的工作制动器上有一个与曳引机同轴的飞轮,在飞轮下面装有磁头感应块。另有脉冲接收器装在工作制动器支架上,与电源开关相连接。飞轮转动时,脉冲接收器接收磁头感应块产生脉冲信号,通过PLC 逻辑判断就能控制速度。当自动扶梯速度高于额定速度1.2倍之前时,速度监控装置应能切断自动扶梯的电源使自动扶梯停车,这样才能符合国家标准(GB16899-1997)的要求。根据速度监控装置的
22.3自动扶梯、自动人行道安装 1.目的 本施工技术标准规定了自动扶梯和自动人行道的安全规范,其目的是保证安装时发生安全和质量事故。 本施工标准适用于所有新制造的自动扶梯和自动人行道(板式)的安装 2.职责 自动扶梯或自动人行道安装工程是整个建筑施工工程的分部工程,在施工中要与许多施工单位产生配合过程,所以要求施工负责人要协调好其他相关单位的配合工作,同时要在抓好施工安全和施工质量,并分清工程施工中的责任问题。 3.输入 3.1材料的检验 自动扶梯、自动人行道安装工程材料由电梯生产厂家提供,材料的检验工作是在电梯安装前的拆箱点件过程中进行,在该过程中须由业主、监理单位、生产厂家及安装单位一同对电梯货物进行检验,女如发现有缺件、坏件的情况,各方在材料检验单上签字确认,并由生产厂家及时补充。 3.2器具的认可 3.2.1安装的器具由公司物资部提供并确保其提供的施工器具安全有 效。物资部根据工程质量计划的要求准备适宜的机具和设备,以满足安装施工的需要,并负责指导项目经理部使用和维护设备、机具。机具、设备发放使用前物资部应检查设备和机具的性能完好状况。使用中,项目经理部按公 司《施工设备使用维护注意事项》进行维护保养。 322机具设备的操作人员按规定须持证上岗的,应做到持证上岗。
3.3计量设备的校准 3.3.1公司技术部负责计量设备的检测工作。根据中华人民共和国计量法”和设备使用情况,及时送国家认可的计量检测单位进行校准,并将检测情况记入计量设备档案” 3.3.2安装所使用的计量器具由公司技术部定期送往国家指定的计量检定部门进行校准,以确保其使用精度,防止在施工使用不准确或超过检定有效期的计量设备。若在使用过程中发现问题,项目部应及时通过技术部送检,确保计量设备的准确性和可靠性。 3.4人员资格要求 3.4.1任命项目经理,组建项目经理部 工程合同签订以后,由生产副总经理依据办公室提供的人员资格情况,任命具有完成合同要求能力的人员担任项目经理,组建项目经理部,项目经理参与施工前的准备工作。 3.4.2人员管理 办公室负责提供具有资格的项目经理部施工人员名单,凡新入场及转移工地的施工人员,必须接受入场教育。办公室负责组织安质、施工、技术等部门进行入场教育培训,并保存好教育培训记录。凡未接受入场教育的人员不得入场施工。 3.4.3为了加强对劳动力的动态管理,公司设立劳动力动态考核记录表”由项目部填写,在工程结束后由办公室组织相关部门对劳务分供方情况提出评价意见,由总经理做出批示后交办公室执行。 3.5环境要求 3.5.1将要安装自动扶梯或自动人行道的建筑主体已完工,并且能够提供出完整清洁且符合图纸要求的井道。
南京理工大学 毕业设计说明书(论文) 作者: 学号: 学院(系): 专业: 题目: 自动扶梯节能运行控制系统设计 张雯高级实验师 指导者: 评阅者: 2012 年 6 月
南京理工大学 毕业设计(论文)评语 学生姓名:班级、学号: 题目: 综合成绩: 指导者评语: 指导者(签字): 年月日
毕业设计(论文)评语 评阅者评语: 评阅者(签字): 年月日答辩委员会(小组)评语: 答辩委员会(小组)负责人(签字): 年月日
毕业设计说明书(论文)中文摘要 自动扶梯是一种以运输带方式运送行人的工具,广泛应用于大型商场、超市、机场、地铁等场合,为人们的出行带来了极大的方便。随着科技的发展,人们对于自动扶梯要求的提高,自动扶梯也向着高科技、节能、智能化的方向发展,着力为人们提供安全、稳定、节能、舒适的乘坐体验。本设计中的运行控制系统采用三菱FX2N系列PLC与西门子MICROMASTER440变频器相结合的控制方式,本控制系统应用到自动扶梯上之后,通过自动扶梯两端安装的传感器,可以根据实际客流选择不同的运行速度,以达到节能、减少磨损的目的,同时充分发挥PLC的控制功能,加入了扶梯防倒溜功能,保证自动扶梯出现意外时可以最大限度的保障乘客的安全,提高扶梯的安全性。 关键词控制系统 PLC 变频器
毕业设计说明书(论文)外文摘要 Title Escalator energy-saving operation control system design Abstract The escalator is a conveyor belt transporting pedestrians tool, widely used in shopping malls, supermarkets, airports, subway and other occasions, has brought great convenience for people to travel. With the development of science and technology, the requirements of the escalator to improve the escalator toward the high-tech, energy-saving, intelligent direction, and efforts to provide safe, stable, energy-saving, comfortable ride. The design of the operation control system is a Mitsubishi FX2N Series PLC and Siemens MICROMASTER440 inverter combination of control methods, this control system is applied to the escalator, escalators installed the sensor at both ends, according to the actual passenger flux to select different running speed, in order to achieve energy efficiency, reduce wear purpose. Giving full play to the PLC control functions, join the down escalator anti-slip function, to ensure that the escalator can maximize safeguard the safety of passengers when accident happened, improve the safety of the escalator. Keywords Escalator PLC Frequency converter
★J系列自动扶梯安全回路线号一览表(COL.005) 安全回路:(总)ROS-80 上部安全:61A-70 下部安全:70-80 急仃开关:ROS-61 印板:61-61A 56-57:(TOP)STOP<急停按钮> 57-59:(BOT)REST RUN<停止开关>; 59-59A:(BOT)STOP<急停按钮>; 59A-59B:(BOT)DOS<前沿板开关>; 62-62A:(TOP-R)E-STOP<蜂鸣器停止钥匙开关>; 62A-62B:(TOP-R)HGS<扶手入口保护装置>; 62B-62D:(TOP-R)SRS<梯级滚轮开关>; 62D-63:(TOP-R)HBS<扶手带断带保护开关>; 63-63A:(TOP-L)E-STOP<急停按钮>; 63A-63C:(TOP-L)HGS<扶手带入口保护装置>; 63C-63D:(TOP-L)SRS<梯级滚轮开关>; 63D-63E:(TOP-L)CRS<弯曲部导轨安全开关>; 63E-64:(TOP-L)HBS<扶手带断带保护开关>; 64-65:(TOP)HGD<高速限速开关>; 65-66:(TOP)DCS<驱动链安全开关>; 75-75A:(BOT-R)E-STOP<停止钥匙开关>; 75A-75B:(BOT-R)HGS<扶手入口保护装置>; 75B-75C:(BOT-R)SCS<梯级链安全开关>; 75C-76:(BOT-R)SRS<梯级滚轮开关>; 76-76A:(BOT-L)E-STOP<急停按钮>; 76A-76B:(BOT-L)HGS<扶手入口保护开关>; 76B-76C:(BOT-L)SCS<梯级链安全开关>; 76C-76D:(BOT-L)CRS<弯曲部导轨开关>; 76D-77:(BOT-L)SRS<梯级滚轮开关>; 77-77A:(BOT-R)CSS<梳齿板开关>; 77A-77B:(BOT-R)SSS<围裙板开关>; 77B-79:(BOT-L)SSS<围裙板开关>; 79-79A:(TOP-R)SSS<围裙板开关>; 79A-79B:(TOP-L)SSS<围裙板开关>; 79B-79C:(TOP-L)CSS<梳齿板安全开关>。 E11速度异常检出后运转信号不断开电源再接通后进行错误清除操作
自动扶梯与自动人行道定期检验自检报告 注册代码 使用单位 设备代码 设备名称 设备类型 自检日期
说明 1、本报告格式适用于曳引驱动电梯安装改造重大维修后的检查。 2、本报告依据TSG T7005-2012《电梯监督检验和定期检验规则——自动扶梯与自动人行道》等法规、标准制定。 3、项目自检结论为“合格”的,在“自检结果”栏中填写“√”;结论为“不合格”的,在“自检结果”栏中填写“╳”;该项目不适用本台电梯,作“无此项”处理,在“自检结果”栏中填写“/”。要求测试数据的项目应填写实测数据,测试多个或一组数据时在附表或附图中记录。 4、检验所用计量器具均在计量检定合格或校准有效期内。 5、检验条件应符合TSG T7005-2012《电梯监督检验和定期检验规则——自动扶梯与自动人行道》的规定。 6、无相关人员签名、未填写检验日期、未加盖施工单位公章或检验专用章的自检报告无效。 7、本报告书一律采用黑色钢笔、签字笔填写,字迹应工整,亦可计算机打印输出,如作修改,修改处应签署修改人员姓名和日期。填写内容务必完整!(内容不完整将无法及时出具检验报告)。 8、本报告一式三份,由特种设备检验机构、使用单位和日常维保单位分别保存。 注:自检项目应不少于检验要求的检验项目,各电梯公司可根据各自电梯的特性,增加自检项目。
电梯基本信息表设备名称使用登记编号使用单位地址 使用单位联系人联系电话设备使用地点 组织机构代码使用单位设备编号 安全管理人员制造日期年月日制造单位 型号产品出厂编号 维护保养单位 维护联系人维保电话 设备名称□室内自动扶梯□室内自动人行道□室外自动扶梯□室外自动人行道设备类型□自动扶梯□自动人行道设备型式□普通型□公共交通型 设备技术参数 名义速度m/s 名义宽度mm 倾斜角°输送能力P/h 提升高度m 使用区段长度m 电机型号电机功率kW 制动器型式□机电式□非机电式 备注
图文解说电梯电气原理知识 电梯门锁、检修、抱闸线圈、运行继电器回路 1、原理图 2、原理说明 门锁JMS: 在每道厅门和轿门上都设有门电气联锁触点,只有当全部门关闭好后,所有门电气联锁联点闭合,门锁继电器JMS吸合,电梯才能运行。 检修JM: 在轿内和轿内都装有检修开关,检修开关拨至检修位时,检修继电器JM吸合,电梯处于检修状态。
抱闸线圈:DZZ 在下列四种状态下,抱闸线圈得电,制动器打开: (1)快车上行,即S↑、K↑。 (2)快车下行,即X↑,K↑。 (3)慢车上行,即S↑,M↑。 (4)慢车下行,即X↑、M↑。 电梯开始运行时,因为1A、2A仍未吸合,它们的常闭触点把RZ1短路,所以DZZ得以110V直流电压,电梯启动后经过一段时间延时,1A吸合,使电阻RZ1串联到DZZ线圈中,DZZ两端电压下降至70V左右,称为维持电压。电容C8的作用是为了DZZ从110V电压降至维持电压时有一个过渡的过程,防止DZZ电压的瞬变而引起误动作。电阻RZ2构成DZZ的放电回路。 为了防止电梯从快车K转换到慢车M时,DZZ有一个断电的瞬间,所以放入JK延时继电器,从而保证了制动器不会发生两次动作。 运行继电器JYT: 当电梯上行接触器S或下行接触器X吸合时,运行继电器JYT吸合,表示电梯在运行之中。
加速与减速延时继电器 1、原理图 2、原理说明: 当司机按下方向按钮启动关门时,通过JYT、1JQ,使J1SA吸合,则时通过R1SA给电容C1SA充电,当电梯开始运行时,JYT↓,J1SA并未立即释放,C1SA通过R1SA对J1SA放电,使J1SA仍吸合一段时间,所以J1SA是延时释放继电器。当J1SA释放时,一级加速接触器1A吸合,电梯经过降压启动到一级加速后进入稳速快车状态(参看运行回路)。 电梯在快车运行状态时,J2SA、J3SA、J4SA都处于吸合状态,一旦转入慢车,
报告编号: 自动扶梯与自动人行道 (安装自检报告) 使用单位:_________________________ 内部编号:_________________________ 注册代码:_________________________ 设备类型:_________________________ 设备型式:_________________________ 自检日期:_________________________ **电梯工程有限公司
说明 1、本检验记录依据《电梯监督检验和定期检验规则——自动扶梯与自动人行道》(TSG7005—2012)、《<电梯监督检验和定期检验规则——自动扶梯与自动人行道>(TSGT7005-2012)第1号修改单》、《<电梯监督检验和定期检验规则——自动扶梯与自动人行道>(TSGT7005-2012,2013年第1次修改)第2号改单》及《省质监局关于新增电梯检验项目的通知》(黔质技监特函[2016]191号)文件制定。 2、本检验记录适用于自动扶梯与自动人行道的安装、改造、重大维修自检。 3、检验用仪器、量具其性能和精度应符合有关标准的规定,并在国家计量部门定期检定的有效期内。 4、本自检报告必须有自检人员、审核人、审批人签字及单位盖章后生效。 5、自检报告中统一填写自检结论:“合格”、“不合格”或“无此项”。 6、自检结果栏中有数据要求的必须填写实测结果数据,没有数据要求统一填写:“符合”、“不符合”或“无此项”。 7、本自检报告应当由计算机打印输出,或者用黑色笔认真填写,字迹应当工整,如作修改,修改处应当有修改人员签名。
基于PLC的自动扶梯控制系统设计 摘要:目前,自动扶梯已广泛用于办公楼、地铁站、豪华酒店、商场以及机场 等公共场所,已成为现代生活中最重要的工具。本文主要是详细的介绍基于标准PLC的自动扶梯控制系统功能设计,从单片机控制板的详细设计,系统开发的软 件设计,软件的设计等方面,介绍了基于标准PLC的自动智能扶梯整体控制系统 功能的详细设计。 关键词:PLC;扶梯系统;设计 1、前言 在社会日益进步、科学研究日新月异的发展过程中,自动扶梯的自动完成技 术被广泛应用于各种公共场所,将给现代人的生活带来极大的便利。此外,该系 统自动扶梯可以对系统进行控制,并取得了很大的进步。过去,自动扶梯在安全 保障、程序设计、标准使用和维护等方面控制着系统的性能。很难满足大多数人 的实际需要。在此基础上,本文重点研究了基于市场的自动扶梯控制系统的设计 与实现。该系统可用于控制系统的自动扶梯计算机,使自动扶梯更加智能化。 2、单片机控制板电路 嵌入式机器人可编程执行器几乎在系统中由60台机器组成,光电隔离保持在关闭位置,光电技术隔离保持在关闭输出能力,内部和内部扩展半导体存储器等。这7台机器基本上由STC单片机的外部和内部扩展存储芯片组成,总共嵌入30 个点。将选择44引脚LQFP封装方法,还可以选择三种类型的微控制器。此外, 对于11.0592Mhz的可选时钟振荡器频率,有18种光电技术再次与关闭输入盒隔离,并且每个电路元件都相同。18张公开的描述COM端子的公开图片,活动的 内部和外部24VDC插头。18个直接输入x000的嵌入式X007,X016,X023和 x010,光电磁耦合器它可以输出连接到芯片机的I/O端口,例如P0.6pin引脚p0.0,P2.7,p4.4和p4.5嵌入PLC的中间光学屏障中,并保持OFF输出,具有2个场效 应晶体管和10个中间继电器的I/O端口微型计算机通过该设备连续输出双芯片机光耦芯功率硅芯片控制电路或控制电路,微控制器的I/O端口是p10-p17,p32- p35。光耦合器或继电器触点对应端子的输出可定义为y600000,y004,y003, y002,y025-y013。内部DC24V电源开关直接选择电源。该插头不仅提供更多的 电源开关图片描述和输出容量电路元件,还提供一种将DC转换为5V电源线的芯 片型机器。 3、使用嵌入式PLC控制系统开发的软件 在特定内容的工作中,并使用插件3种各种类型的软件来开发PLC控制软件 系统:Mitsubishi PLC学习编程各种软件和各种软件3.3,是一种将使用Mitsubishi PLC,梯形图的应用软件一个十六进制的代码工具软件,它是一个精美的工具软件。已经看到了两种将梯形图转换为十六进制代码的软件。它是由计算机可编程 的业余爱好者开发的各种软件。逐渐减少版本。该工具软件均支持逐步增加指令,并且重要功能得到了极大的改进。将此处使用的pmwhexv3.0..exe Mitsubishi plc 转换为二进制编码应用程序软件,该软件可以完全免费在线上运行。60芯片机的 编程应用软件是与60芯片机合作开发的通用软件。还可以下载此处使用的STC 并在Internet上免费下载。引入了许多三菱PLC编程应用软件。在此过程中,应 注意,在梯形图控制图的详细设计中,可以使用PLC类型的不同数据类型。 3.1、pmw进制码软件 从PMW文件的内容到hex代码工具软件3.0版的主界面。该工具软件是基于
新版《自动扶梯和自动人行道的制造与安装安全规范》标准解析 黄 辉 GB 16899—2011《自动扶梯和自动人行道的制造与安装安全规范》已于2011年7月29日由国家质检总局和国家标准化管理委员会联合发布并同时实施。 我国自动扶梯和自动人行道安全原国家标准采用1995年的欧洲标准,新实施的国家标准是根据2009年底欧洲标准EN115-1:2008《自动扶梯和自动人行道的制造与安装安全规范》进行修改采用的。修改后的GB 16899—2011在结构上发生了较大的变化,针对制造与安装、维修、改造和使用等各个环节分别对安全提出了要求,将单一标准改成自动扶梯和自动人行道安全要求的系列标准。本标准属于该系列标准的第一部分,是针对制造与安装环节提出的安全要求,其他环节的安全要求将在今后逐步完成。 来自国家质检总局的数据显示,预计2011年底,全国在用电梯总数将达到195万台,保有量和年增长量均为世界第一。随着数量的增多,我国各地自动扶梯事故也呈上升趋势,从2005年开始,我国平均每年发生电梯事故约40起、死亡人数为30人左右。虽然自动扶梯事故死亡率较电梯低,但对伤者产生的伤害以及社会影响却是非常严重的。尤其是2010年和2011年在深圳、北京地铁内分别发生的两次自动扶梯逆转事故,引起了全社会的极大关注。新电梯安全标准的发布实施对预防与控制电梯安全事故有非常积极的意义。 一、新版标准的变化 GB 16899—2011代替GB 16899—1997。与旧标准相比,新标准的重要差别如下: 1.调整了重大危险清单。 2.给出公共交通型在内的所有自动扶梯和自动人行道的要求和建议。 3.增加了梯级和踏板踏面、梳齿支撑板与盖板表面防滑性能的测定。 4.增加了梯级踢板静载与梯级、踏板扭转的试验要求。 5.调整了关于传动元件安全系数的规定。 6.增加了自动扶梯和自动人行道在制停过程中最大减速度的要求。 7.增加了梯级链无限疲劳寿命的原则要求。 8.增加了有关围裙板防夹装置的具体要求。 9.增加了对鞋类等物体在围裙板表面滑动性能的要求。 10.修改了降低人员在扶手带入口与地面之间被夹风险的措施。 11.修改了自动扶梯从倾斜段到上、下水平区段过渡的曲率半径要求。 12.增加了自动扶梯和自动人行道用材料防火性能的要求。 13.增加了对监测装置和电气安全装置(或功能)的要求。 14.增加了自动扶梯和自动人行道可编程电子安全相关系统的相关要求。 15.增加了静电防护的具体要求。 16.增加了自动启动或加速的自动扶梯或自动人行道最小名义速度以及加速度的要求。 17.增加了验证新设计的产品满足本标准安全要求和(或)保护措施的方法。 18.增加了指令标志“握住扶手带”、禁止标志“禁止使用手推车”。 19.增加了有关用于输送购物车和行李车的自动扶梯和自动人行道的要求。 二、新标准依据的原则和方法 新标准的目的是给出自动扶梯和自动人行道的安全要求,以保护在安装、运行、维修和检查工作期间的人员和物体。 新标准使用GB/T 16856.1—2008《机械安全 风险评价 第1部分:原则》、GB/T 20900—2007 6
1.电气原理图、电气敷线图及电气符号说明表 1)电气符号说明表 代号 名称 型号规格 数量安装位置 备注M1 交流电动机 1 上机房 M2 自动加油装置 1 上机房 BZ 抱闸线圈 AC220V 1 上机房 KU 上行方向继电器 DRM570730L 1 控制箱 KD 下行方向继电器 DRM570730L 1 控制箱 KSP 加速信号继电器 DRM570730L 1 控制箱 KC1 制动接触器 3TB44-22 1 控制箱 KC2 辅助制动接触器 3TB44-22 1 控制箱 KA1 安全检测继电器 DRM570012L 1 控制箱 KA2 安全接触器 3TB40-22 1 控制箱 KDT 附加制动接触器 3TB40-22 1 控制箱 KPH 相序继电器 ABJ1-122 1 控制箱 K1 主电源开关 JFD11-80 1 控制箱 K2 照明电源开关 DZ47-63 C6 1 控制箱 K3 断路器 C45N 3P C40 控制箱 FU1、FU2 熔断器 6A 2 控制箱 FU3 4A 1 控制箱 FU4、FU5、FU7 2A 3 控制箱 FU6 0.5A 1 控制箱 XAS 2P插座 36V/10A 2 控制箱 XAX 下分线箱 XS 2P+PE插座 220V/10A 2 控制箱 XX 下分线箱 GYM 故障显示译码板 XS-Ⅲ 1 控制箱 PGS 上故障显示盒 1 上右端头围裙板 PGX 下故障显示盒 1 下左端头围裙板 V1 上部光电感应开关 ELS263R(ELS263E) 1 上部围裙端头板 V2、V3 上部光电感应开关 BA2M-DDT 2 上部前壁板 V4 下部光电感应开关 ELS263R(ELS263E) 1 下部围裙端头板 V5、V6 下部光电感应开关 BA2M-DDT 2 下部前壁板 CS 接近开关 HS-CS12-N11-V050 2 主机链轮旁 BPQ 变频器 CIMR-F7B4011A 1 上机房 R 制动电阻 1000W 72Ω 2 上机房 PLC 可编程控制器 FX1S-20MR 1 控制箱 TC1 电源变压器 TDB100-06 1 控制箱 TC2 电源变压器 TDB63-01 1 控制箱 TC3 开关电源 S-15-24 1 控制箱 SSY 上端钥匙开关 LA□-720Y 2 上右端头围裙板 SXY 下端钥匙开关 下左端头围裙板 SJT2 上端急停按钮 LA□-720P 2 上右端头围裙板 SJT 3 下端急停按钮 下左端头围裙板 SJT 1 控制箱急停按钮 LA49-□□J/4 2 控制箱 SJT 4 分线箱急停按钮 下分线箱 XJD 检修插头 1 手控检修装置 XJS 上检修插座 1 控制箱 XJX 下检修插座 1 下分线箱
文件编号:RHD-QB-K7688 (操作规程范本系列) 编辑:XXXXXX 查核:XXXXXX 时间:XXXXXX 自动扶梯故障分析与维修方法标准版本
自动扶梯故障分析与维修方法标准 版本 操作指导:该操作规程文件为日常单位或公司为保证的工作、生产能够安全稳定地有效运转而制定的,并由相关人员在办理业务或操作时必须遵循的程序或步骤。,其中条款可根据自己现实基础上调整,请仔细浏览后进行编辑与保存。 在自动扶梯的维修保养过程中,本人总结了以下工作经验,供大家参考。 1 速度监控装置有故障,自动扶梯不能正常运行 1.1 故障现象 有1台型号为GRF30-100的自动扶梯在安装竣工后,交付给客户使用过程中,自动扶梯不能正常运行,PLC(可编程控制器)数码显示出E—扶梯超速、欠速故障。引起这一故障的原因可能有以下情况:
①电源电压不稳定;②PLC已损坏;③脉冲接收器已损坏。通过详细分析和检测结果表明电源电压稳定、PLC和脉冲接收器完好无损,但发现安装在工作制动器上的脉冲接收器和磁头感应块错位及两者之间的垂直间隙过大。 1.2 分析原因 该自动扶梯的速度监控装置的工作原理是:在驱动主机的工作制动器上有一个与曳引机同轴的飞轮,在飞轮下面装有磁头感应块。另有脉冲接收器装在工作制动器支架上,与电源开关相连接。飞轮转动时,脉冲接收器接收磁头感应块产生脉冲信号,通过PLC 逻辑判断就能控制速度。当自动扶梯速度高于额定速度1.2倍之前时,速度监控装置应能切断自动扶梯的电源使自动扶梯停车,这样才能符合国家标准(GB16899-1997)的要求。根据速度监控装置的
工作原理和PLC数码显示的信号判断,产生故障的原因是脉冲接收器和磁头感应块错位及两者之间的垂直间隙过大,致使脉冲接收器未能完全接收脉冲信号而自动切断自动扶梯的电源,使自动扶梯不能正常运行工作。 1.3 维修方法 松动工作制动器支架上的脉冲接收器,通过飞轮上的预留孔,将脉冲接收器与飞轮下面的磁头感应块对正,并调整脉冲接收器和磁头感应块之间的垂直间隙为5mm,紧固脉冲接收器后,自动扶梯正常运行工作。 2 传动链条磨损和张紧过松,自动扶梯舒适感比较差 2.1 故障现象 自动扶梯在经过几年的运行后,往往在乘坐时会
一、概述 采用PLC进行控制,通过自动减小负载、利用星形一三角形减压启动、降低电机启动电流、进行安全互锁控制等多种方法,充分发挥PLC在可靠性和控制灵活性上的优势,从而提高整个系统的运行可靠性和安全性。 二、选择PLC 可编程序控制器 FX1S-14MR 三、自动扶梯PLC I/O分配表 I输入端口功能说明O输出端口功能说明X0 感应器Y0 电铃 X1 安全检测继电器Y1 自动润滑加油泵 X2 安全接触器Y2 上行接触器 X3 上正常-检修转换开关Y3 下行接触器 X4 下正常-检修转换开关Y4 星形启动接触器 X5 启动上行Y5 三角形运行接触器X6 启动下行Y6 X7 防粘连功能Y7 四、外部接线图
五、电气原理图、电气符号说明表及电气接线图 1)电气原理图 自动扶梯电气原理说明
在自动扶梯的上、下机房中装有控制箱、分线箱,控制箱、分线箱上面都设有急停开关、检修转换开关及检修插座,控制箱上还设有主电源开关K1。在自动扶梯上、下段端头围裙板上装有钥匙开关、急停开关及故障显示器。在自动扶梯正常运行时,把主电源开关置为ON,且上、下检修转换开关置于“正常”位置,当安全回路中的开关都正常时,操作人员把钥匙开关打在向上(或向下)运行位置,此时电铃响,警示乘客注意,然后钥匙开关复位,电铃停止响动,PC 机输出信号使KS向上(KX向下)运行接触器、KQD星形启动接触器吸合,自动扶梯启动向上运行,稍后KQD释放,KYX三角形运行接触器吸合,自动扶梯正常运行。 自动扶梯检修原理 将控制柜上的,检修转换开关置于“检修”位置时,自动扶梯就处于检修状态,此时,自动扶梯不能正常运行。当安全回路中的开关都正常时,把检修插头插入检修插座中,按下检修盒面板上的上行或下行按钮时,自动扶梯就可以点动运行。同理,将分线箱上的检修转换开关置于“检修”位置时,自动扶梯就处于检修状态,此时,自动扶梯不能正常运行。当安全回路中的开关都正常时,按下检修盒面板上的上行或下行按钮时,自动扶梯就可以点动运行。应当注意的是:当控制柜和分线箱的检修转换开关同时置为“检修”时,自动扶梯既不能检修运行,也不能正常运行。 2)电气符号说明表: 电气元件代号说明共2页第1页 代号名称甩号规格数 量安装位置备注 Ml 交流屯动机 1 上机辟M2 抱闸电机 1 上机房M3 自动加油装置 1 上端金厲架内BZ 抱闸线圈AC220V 1 主机上KS 上行接触器3TB44-22 1 控制箱KX 下行接触器3TB44-22 1 控制箱KQD 星形启动接触器3TB44-22 1 控制箱KYX 三角形运行接触器3TB44-22 1 控制箱KC1 安全检测继电器JZX-18FF 1 控制箱KC2 安全接触器3TB40-22 I 控制箱KPH 相序继电器XJ11 1 控制箱KR 热继电器3UA59 1 控制箱KI 主电源开关JFD11-44 1 控制箱K2 照明电源开关DZ47-63 C6 l 控制箱FU1、FU2 烙断器RT18-32 6A 控制箱FU3 烙断器RT18-32 4A 1 控制箱FU4. FU5 熔断器RT18-32 2A 控制箱FU6 烙断器0.1A 1 控制箱XAS 两眼扁插座36V 1 控制箱XAX 两眼扁插座36V 1 分线箱XS 二眼扁插座220V 1 控制箱XX 二眼扁插座220V 1 分线箱GYM 故陣显示译码板XS-IU 1 控制箱PGS 上故陣显示盒 1 上端右围裙板PGX 下故陣显示盒 1 下端左围裙板PLC 可编程控制器FX1S-14MR 1 控制箱B1 电源变压器BK100 1 控制箱B2 电源变压器BK63 1 控制箱
自动扶梯和自动人行道日常维护保养记录 使用单位 安装地点 设备编号 维保单位(章)维保日期年月日至年月日
说明 一、本记录适用于自动扶梯和自动人行道的日常维护保养。 二、维保单位的维护保养资质必须在有效期限内,方能与使用 单位签订《维护保养合同》。且《维护保养合同》期限不得超过维护保养资质有效期限。 三、在本记录中,半月、季度、半年、年度维保记录项目(内容)由上向下覆盖,不重复单列。 四、在半月维保基础上,季度、半年、年度保养中的具体项目 (内容)可根据制造商要求或电梯实际使用情况穿插实施,但至少在最好一次半月维保时完成。 五、若有本记录未覆盖项目(如:某些电梯没有本记录中的项目),维保单位应按照该电梯设计或维保要求对未覆盖项目进行维 保,并在维保项目下方空白处或备注中增补,备注不够可另附一张纸。 六、维保单位(内容)和要求中对测试、试验有明确规定的, 应当按照规定经行测试、试验,并在备注中填写测试数值或试验结果。 七、维保单位应严格履行对电梯的维护保养职责,并认真填写本记录。 八、本记录正文应保证完整,不得有缺失。 九、本记录由电梯使用单位和维保单位各自负责保管。
电梯管理基本情况与技术参数
维保项目(内容)和基本要求
序号 维保项目(内容) 维保基本要求 32 相对于梯级、踏板或者胶带的速度允差为 0~+2% 扶手带的运行速度 33 工作正常 梯级链张紧装置 34 润滑有效 梯级轴衬 35 运行工况正常 梯级链润滑 36 动作可靠(雨季到来之前必须完成) 防灌水保护装置 37 不小于制造单位要求 制动衬厚度 38 清理表面油污,润滑 主驱动链 39 清洁,厚度符合标准 主驱动链链条滑块 40 符合标准 空载向下运行制动距离 41 润滑,工作有效 制动器机械装置 42 清洁和润滑,功能可靠 附加制动器 43 更换,符合制造单位的要求 减速机润滑油 44 符合标准 调整梳齿板梳齿与踏板面齿槽啮合深 度和间隙 45 符合标准 扶手带张紧度张紧弹簧负荷长度 46 工作正常 扶手带速度监控器系统 47 功能正常,温度感应器接线牢固(冬季到来之前必须完成) 梯级踏板加热装置 48 主接触器 工作可靠 49 主机速度检测功能 功能可靠,清洁感应面,感应间隙符合制造单位要求 50 电缆 无破损,固定牢固 51 扶手带托轮、滑轮群、防静电轮 清洁,无损伤,托轮转动平滑 52 无损伤,清洁扶手导轨滑动面 扶手带内侧凸缘处 53 功能正常 扶手带断带保护开关 54 清洁,工作正常 扶手带导向块和导向轮 55 符合标准 在进入梳齿板处的梯级与导轮的轴向 窜动量 56 紧密牢固,连接处的凸台、缝隙符合标准 内外盖板连接 57 围裙板安全开关 测试有效 58 围裙板对接处 紧密平滑 59 电气安全装置 动作可靠 60 设备运行状况 正常,梯级运行平稳,无异常抖动,无异响