收稿日期:2008206219
基金项目:国家自然科学基金资助项目(50777028
作者简介:吴猛(1974—
,男,博士,讲师,E 2mail :wu _meng @https://www.doczj.com/doc/e35293829.html, ;朱喜林(1959—,男,教授,博士生导师,E 2mail :zhuxl @https://www.doczj.com/doc/e35293829.html,.第29卷第2期2009年2月北京理工大学学报
Transactions of Beijing Institute of Technology
Vol.29No.2Feb.2009
自抗扰控制器参数整定方法的研究
吴猛1,2,朱喜林1,3,鄂世举1,3,孙明革1,2,童少为2
(1.吉林大学机械科学与工程学院,吉林,长春130025; 2.吉林化工学院自动化系,吉林,吉林132022;
3.浙江师范大学交通学院,浙江,金华321004
摘要:提出了自抗扰控制器算法参数整定的计算机软件仿真分析和基于参数变换的公式推导两种方法.根据自抗扰控制方程,针对算法中多个参数需要整定的问题,结合工程中控制对象实例,采用M atlab 仿真软件逐一确定各参数,寻找同类对象之间的控制参数关系,利用公式得到其他对象的控制器参数.使用M atlab 仿真分析
法可直观地获取参数,公式推导法则简化了同类对象的参数整定,速度快.仿真实验结果表明,这两种参数整定方法可用于常见的工业控制对象的自抗扰控制器中.
关键词:自抗扰控制器;参数整定;M atlab 软件;参数变换
中图分类号:T P 273文献标识码:A 文章编
号:100120645(2009022*******
A Study on Parameters Setting Methods for Active
Disturbance R ejection Controller(AD RC
WU Meng 1,2,ZHU Xi 2lin 1,3, E Shi 2ju 1,3,SUN Ming 2ge 1,2,TON G Shao 2wei 2
(1.Mechanic Science and Engineering College ,Jilin University ,Changchun ,Jilin 130025,China ;2.Department of Automation ,Jilin Institute of Chemical
Technology ,Jilin ,Jilin 132022,China ;
3.Traffic College ,Zhejiang Normal University ,Jinhua ,Zhejing 321004,China
Abstract :Two met hods for t he parameter setting of active 2dist urbance 2rejection controller (ADRC algorit hm are propo sed.According to t he ADRC equation ,it needs to set up a number of parameters.
Taking t he cont rol 2object in t he p roject as example ,t he parameters are
determined individually using Matlab simulation.After getting t he relationship of cont rol parameters between similar object s ,t he cont rol parameters of ot her object s are achieved from derivation.Parameters can be obtained int uitively using Matlab simulation analysis.Parameters setting of similar object s is simplified and quickened using formula derivation.Simulation result s showed t hat t he two met hods used in ADRC of common cont rol 2object in industry can attain fine cont rol effect.
K ey w ords :active 2dist urbance 2rejection cont roller (ADRC ;parameter
setting ;Matlab ;param 2
eter t ransformation
自抗扰控制器(A D R C 是由非线性PI D 控制
器演变而来的.它继承了P I D 控制器简单、易于实现、鲁棒性好的优点[1],同时也克服了其误差取法不合理、没有误差微分提取办法、组合方式不理想等缺点.它将系统模型的作用作为内扰,与系统的外扰一起看作是总扰动,从而对这个总扰动进行补偿[2].目前,A D R C 较为广泛地应用于工程实际中.A D R C 算法较为复杂,有多个参数需要整定.而参数选择的合适与否将直接关系到A D R C 对实际对象控制效果的优劣.当前,A D R C 常用的参数整定
方法用计算机辅助软件或自制软件对参数进行估计和选择,取得较好效果,但是操作不够直观和快捷.作者给出了两种自抗扰参数整定方法,通过对工业中常见的含时滞一阶惯性环节的分析,提出了一种新的方法,将原来多个参数的整定简化为
T ,τ,K 三个参数的选择和整定,快速且准确.使用这两种方法对实际对象参数整定完全满足自抗扰控制器应用的需要.
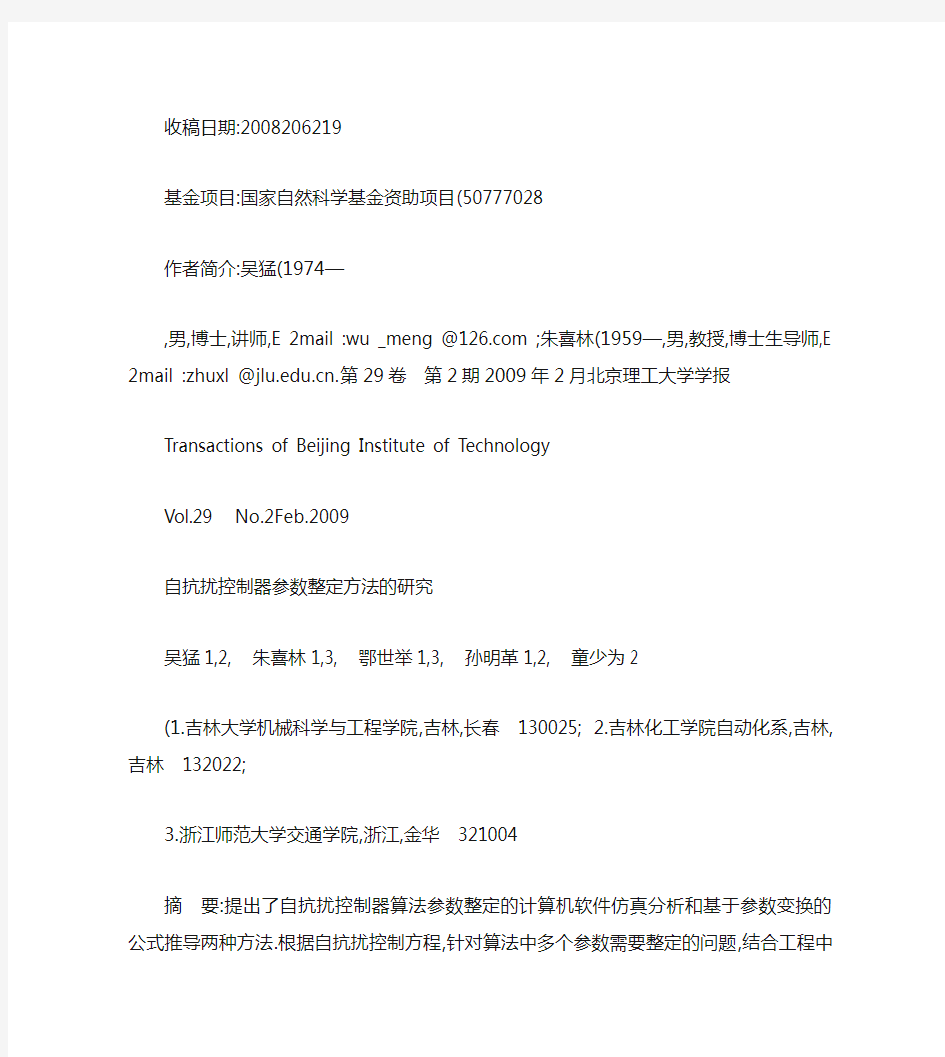
图1 A D RC 系统结构图
Fi g.1S t ruct ure of A D RC system
1AD RC 结构及待整定参数
以二阶A DRC 为例,其结构框图如图1所示.其中TD 是微分跟踪器,给出过渡过程V 1及其微分V 2;N L S EF 为非线性控制器,是安排的过渡过程与对象状态变量之间误差的非线性控制策略,对e 1和e 2进行非线性组合并输出控制信号u
0;ESO 是扩张状态观测器,跟踪对象输出y 并估计对象的各阶状态变量Z 1,Z 2和对象总扰动实时作用量Z 3;G 是被控对象;b 是控制输入放大系数.对应的具体方程形式如下.
TD
V 1=V 2, V 2=(4V 0/t 2c sgn (T t /2-t ,t ≤t c ,V 1=V 0,t >t c .(1
ESO
e 0=Z 1-y , Z 1=Z 2-β01e 0,
Z 2=Z 3-β02M fal (e 0,α01,δ0+bu , Z 3=-β03M fal (e 0,α02,δ0,
(2
NL SEF
e 1=V 1-Z 1,e 2=V 2-Z 2,
u =u 0-Z 3/b =β1M fal (e 1,α1,δ1
+β2M fal (e 2,α2,δ2-Z 3/b.
M fal (e ,α,δ=e α
sgn (e ,e >δ
e/δ1-α
,e ≤δδ>0.式中:V 0为给定值;u 为控制量;y 为对象输出;
Z 1,Z 2,Z 3是ES O 的输出;e 0为状态观测器的观测
误差;t c 为安排的过渡过程时间;β01,β02,β03,β1,β2
是修正系数.M f al (e ,α,β函数是一种非线性函数,
是输出误差校正率,e 是误差,α是指数,δ是区分e
大小的界限.
由上述A DRC 控制方程可知,t c ,β01,β02,β03,β1,β2,α01,α02,α1,α2,δ0,δ1,δ2,b ,h 0为方程中的待定参数,其中h 0为方程离散化的积分步长,即采样时间.
2基于Matlab 软件仿真分析的参数
整定方法
图2是A D R C 参数的M atl ab 仿真方法流程,
根据A D R C 特性,对t c ,
α01,α02,α1,α,δ0,δ1,δ2,b ,h 0参数进行设定.这里,选取α01>α02,α1≤α2.在既大于对象反应时间又满足工艺过程要求的情况
下确定系统的过渡过程时间初值t c .参数β01,β02,β03,β1,β2可先任意调整其一,这里先选择确定β01,根据仿真结果决定如何调整其它4个参数的大小和变化方向,从而逐个确定参数(选择对应参数仿真结果稳定区间的中间值,最后进行参数优化.虽然
5个参数已经找到,但由于初始寻找时所有参数起
点均为约定,因此,这些参数目前仍不是最佳,重复
这个过程进行优化,即可找到比较好的参数值[3].
图2 A D RC 参数仿真流程图
Fi g.2Flow chart of si mulation f or A D R C parameters
3基于参数变换的公式推导法
对于两个或两个以上的相似控制对象,如果其中一个对象已经得到一组A D R C 参数,使用公式推导的方法找到其它几个对象的控制参数与其的相应关系.以工程应用中最常见的含时滞的一阶惯性环节对象为例,来探讨这个问题[4].两个含时滞的一阶惯性环节对象的传递函数为
G 1(S =y 1(s u 1(s =K 1T 1S +1e -τ
1s ,
(3G 2(S =
y 2(s u 2(s =K 2T 2S +1
e -τ
2s .
(4
对应的时域方程为
221北京理工大学学报第29卷
y ?
11(t =-a 1y 11(t +b 1u 1(t ,y 1(t =y 11(t -τ1,
(5y ?
22(t =-a 2y 22(t +b 2u 2(t ,y 2(t =y 22(t -τ2
,
(6
式中:a 1=1/T 1,b 1=K 1/T 1,a 2=1/T 2,b 2=K 2/
T 2.G 1(T 1,K 1,τ1的A D R C 参数为(t
c ,β01,β02,β03,β1,β2,α01,α02,α1,α2,δ0,δ1,δ2,b ,h 0已知,求
G 2(T 2,K 2,τ2的A D R C 参数为(t ~
c , β01, β02, β03,
β1, β2, α01, α02, α1, α2, δ0, δ1, δ2, b , h 0.
令两个对象的时间常数之比为m ,m =T 2/T 1,静态放大倍数之比为n ,n =K 2/K 1,取τ1/T 1=τ2/T 2.则可知, h 0=mh 0,t ~
c =mt c .G 2(T 2,K 2,τ2所在系统的时间坐标变换为p =mt.
将t ~
c =mt c ,p =mt 代入式(1,推出 V 1(p =V 1(t ,m V 2(p =V 2(t ,m 2
V ?
2(p = V 2(t .一阶惯
性环节的阶跃响应通式为y =K A (1-e -t
T ,若让G 2
(T 2,K 2,τ2的阶跃输入幅度为A/r ,则有 y (p =y (t , Z 1(p =Z 1(t ,从而e 0(t = e 0(p ,Z 2(t =m Z 2(p ,Z 3(t =m 2 Z 3(p ,e 1(t = e 1(p ,e 2(t =m e 2(p .将上述相关关系分别带入式(2和N L S EF
e 0(p = Z 1(p - y (p , Z ?
1(p = Z 2(p -β01
m
e
0(p , Z ?
2(p = Z 3(p -β02
m
2
M fal ( e 0(p ,α01,δ0+
n
m
2b u (p , Z ?
3(p =-
β03
m
3
M fal ( e 0(p ,α02,δ0.
M fal ( e 1(p ,α1,δ1=M fal (e 1(t ,α1,δ1,M fal ( e 2(p ,α2,δ2=m -α2
M fal (e 2(t ,α2,δ2.
其中δ2=δ2/m ,由此可推得
u (p =β1
n
M fal ( e 1(p ,α1,δ1+
m α
2
n
β2M fal ( e 2(p ,α2, δ2- Z 3(p /n m
2b .综上所述,比较G 1(T 1,K 1,τ1,A D R C 方程及其参数可知,G 2(T 2,K 2,τ2的参数为(mt c ,β01/m ,
β02/m 2,β03/m 3,β1/n ,m α
2β2/n ,α01
,α02,α1,α2,δ0,δ1,δ2/m ,nb/
m 2,mh 0.
4仿真结果及比较
仅以参数β03的整定为例给出仿真结果,其它4
个参数仿真过程和结果类同.图3是对象模型为
G (S =1/(10S +1的参数β03整定示意图.由图3可知,β03在[0,1]区间变化,共绘制了21条控制曲线,当019<β03≤1时,曲线发散,当0<β03≤019时,曲线稳定且效果较好,即β03在此范围内选择任一值都可满足A DRC 的要求,参数选择具有很好的鲁
棒性.这里,选择β03=015.其它参数设定为:
β01=014、
β02=011、β1=112、β2=1410、δ0=δ1=δ2=b =011、h 0=1、
α01=110,α02=015,α1=015,α2=110.
图3参数β03整定示意
Fi g.3S ketch of parameter β03on setting
图4基于参数变换的自抗扰仿真结果
Fi g.4 A ctive 2dist urbances 2rejection si mulation results based on pa 2
rameter t rans f ormation
(下转第127页
图4(a 是已知对象模型为G 1(S =e -1/(5S +1的各参数已知情况下的自抗扰仿真结果,图4(b 对象模型为G 2(S =4e -3/(15S +1基于变换参数后的仿真结果,其中:选取α01=110,α02=015,α1=015,α2=110,G 1(S 参数为
β01=014,β02=011,β03=011,β1=014,β2=810,δ0=δ1=δ2=b =011,h 0=1;G 2(S 参数变换后为β01=011333, β02=010111, β03=010037, β1
=011, β2=610, δ0= δ1=011, δ2=010333, b =
010444, h 0=3.由仿真结果可以看出,对于一类
控制对象,使用公式推导法得到的参数带入控制器
3
21第2期
吴猛等:自抗扰控制器参数整定方法的研究
为研究串联小孔与单一小孔特性之间的关系,将由串联小孔引起的流动损失因子定义为K,即串连多级毛细孔流量等于等效长度单一毛细孔流量与流动损失因数的乘积.依据分析结果可以得出作者设计的串联K=01936.
q V C=Kq V,(2式中:q V C为串联层流小孔流量;q V为单一毛细孔流量;K为流动损失因数.
5结论
通过对串联多级毛细孔模型进行有限元分析,得到了串联小孔的压力场及速度场分布特性.分析结果表明,多级串联毛细孔两端压降均匀分布在各组合毛细孔上.该模型中小孔连接腔处突缩与突扩的存在虽然会产生流动损失,但主要的压力损失仍由毛细孔承担.小孔连接腔处几何形状突变时流体状态不再保持层流,因此多级串联毛细孔特性并不能直接等效为等效长度相同的单一毛细孔.在差压相同的情况下,串联毛细孔流量等于等效长度相同的单一毛细孔流量与流动损失因数的乘积.串联多级毛细孔分析结果验证了小孔两端差压与流量的线性关系,得到了该模型的流动损失因子,为流量式气密性检测仪的设计与开发提供了理论依据.
参考文献:
[1]Bergoglioa M,Brondinob G,Calcatellia A.Mathemati2
cal model applied to the experimental calibration results of a capillary standard leak[J].Flow Measurement and Instrumentation,2006,17:1292138.
[2]Solomon G M.Standardization and temperature correc2
tion of calibrated leaks[J].Vacuum Science Technolo2 gy,1986,3:3272333.
[3][Anon].Expanded CAD to FEA solid m odel meshing refine2
ment for greater accuracy[J].Aircraft Engineering and Aero2 space T echnology,1998,70(5:3962397.
[4][Anon].Alibre design import extender expands
AL GORπs support for CAD[J].Anti2Corrosion Meth2 ods and
Materials,2003,50(5:1452145.
[5]刘长利,周少林,梁林.AL G OR有限元分析软件实例教程
[M].北京:人民交通出版社,2005.
Liu Changli,Zhou Shaolin,Liang lin.AL G OR—example tutorial of finite element analysis software[M].Beijing: People C ommunications Press,2005.(in Chinese
(责任编辑:康晓伟
(上接第123页
算法方程得到的控制结果,其测量值与给定值的吻合程度很好.两种参数整定方法所得到的参数都可以满足A D R C的控制要求.
M atl ab仿真分析法和参数变换的公式推导法都是在已知对象模型类型基础上的参数整定方法.前者参数可直接通过计算机逐个仿真得到,需要尝试,速度较慢.后者则依赖于一个已知模型对应的参数,再经过变换得到,速度较快.
5结论
①两种方法都能满足控制对象A D R C参数整定的需要;②整定参数具有很强的鲁棒性;③测量值和给定值曲线几乎重合,说明使用整定参数的A D R C控制效果很好;④相同类型控制对象,先用M atl ab仿真分析整定出一个对象的A D R C参数,再用参数变换的公式推导法,对其它对象的参数进行整定,提高整定速度.
参考文献:
[1]韩京清.一种新型控制器—NL PID[J].控制与决策,
1994,9(6:4012407.
Han Jingqing.A new type of controller:NL PID[J].C on2 trol and
Decision,1994,9(6:4012407.(in Chinese [2]韩京清.自抗扰控制器及其应用[J].控制与决策,1998,
13(1:19223.
Han Jingqing.Auto2di sturbances2rejection controller and itπs
applications[J].Control and Decision,1998, 13(1:19223.(in Chinese
[3]张晓东,童少为.用Matlab仿真分析自抗扰控制器的整
定参数[J].微计算机信息,2006,22(1121:90292.
Zhang Xiaodong,Tong Shaowei.Analyzing and confir2 ming the parameters of ADRC with Matlab Simulation [J].Control&Measurement,2006,22(1121:902
92.(in Chinese
[4]夏元清,黄焕袍,韩京清.不确定时滞系统ADRC控制
[J].中南工业大学学报,2003,34(4:3832385.
Xia Yuanqing,Huang Huanpao,Han Jingqing.ADRC control of uncertain systems with time2delay[J].Cent South University of Technology,2003,34(4:3832 385.(in Chinese
(责任编辑:康晓伟
721
第2期纪春华等:多级毛细小孔流动损失的有限元分析