实验一 控制系统的数学模型
- 格式:doc
- 大小:104.00 KB
- 文档页数:4
第二章自动控制系统的数学模型教学目的:(1)建立动态模拟的概念,能编写系统的微分方程。
(2)掌握传递函数的概念及求法。
(3)通过本课学习掌握电路或系统动态结构图的求法,并能应用各环节的传递函数,求系统的动态结构图。
(4)通过本课学习掌握电路或自动控制系统动态结构图的求法,并对系统结构图进行变换。
(5)掌握信号流图的概念,会用梅逊公式求系统闭环传递函数。
(6)通过本次课学习,使学生加深对以前所学的知识的理解,培养学生分析问题的能力教学要求:(1)正确理解数学模型的特点;(2)了解动态微分方程建立的一般步骤和方法;(3)牢固掌握传递函数的定义和性质,掌握典型环节及传递函数;(4)掌握系统结构图的建立、等效变换及其系统开环、闭环传递函数的求取,并对重要的传递函数如:控制输入下的闭环传递函数、扰动输入下的闭环传递函数、误差传递函数,能够熟练的掌握;(5)掌握运用梅逊公式求闭环传递函数的方法;(6)掌握结构图和信号流图的定义和组成方法,熟练掌握等效变换代数法则,简化图形结构,掌握从其它不同形式的数学模型求取系统传递函数的方法。
教学重点:有源网络和无源网络微分方程的编写;有源网络和无源网络求传递函数;传递函数的概念及求法;由各环节的传递函数,求系统的动态结构图;由各环节的传递函数对系统的动态结构图进行变换;梅逊增益公式的应用。
教学难点:举典型例题说明微分方程建立的方法;求高阶系统响应;求复杂系统的动态结构图;对复杂系统的动态结构图进行变换;求第K条前向通道特记式。
的余子式k教学方法:讲授本章学时:10学时主要内容:2.0 引言2.1 动态微分方程的建立2.2 线性系统的传递函数2.3 典型环节及其传递函数2.4系统的结构图2.5 信号流图及梅逊公式2.0引言:什么是数学模型?为什么要建立系统的数学模型?1. 系统的数学模型:描述系统输入输出变量以及各变量之间关系的数学表达式。
1) 动态模型:描述系统处于暂态过程中个变量之间关系的表达式,他一般是时间函数。
第二章 自动控制系统的数学描述一、控制系统的数学模型控制系统的数学模型是描述自动控制系统输入、输出以及内部各变量的静态和动态关系的数学表达式。
控制系统的数学模型有多种形式:代数方程、微分方程、传递函数、差分方程、脉冲传递函数、状态方程、方框图、结构图、信号流图和静态/动态关系表等。
控制系统的数学模型的求取,可采用解析法或实验法。
系统的数学模型关系到整个系统地分析和研究,建立合理的数学模型是分析和研究自动控制系统最重要的基础。
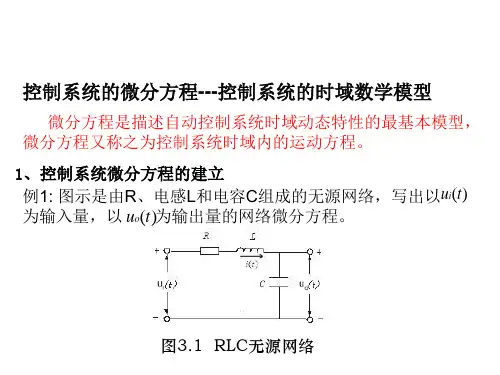
1.微分方程用解析法建立系统的微分方程的步骤:1) 确定系统的输入、输出变量; 2) 根据系统的物理、化学等机理,依据列出各元件的输入、输出运动规律的动态方程; 3) 消去中间变量,写出输入、输出变量的关系的微分方程。
2.传递函数 1) 定义:传递函数是在零初始条件下,系统(或环节)输出量的拉氏变换与输出量的拉氏变换之比。
2) 性质:a) 传递函数是线性系统在复频域里的数学模型;b) 传递函数只与系统本身的结构与参数有关,与输入量的大小和性质无关; c) 传递函数与微分方程有相通性,两者可以相互转换。
3) 表达形式设系统的动态方程为一个n 阶微分方程)......'1)1(1)(0'1)1(1)(0m n r b r b r b r b y a y a y a y a m m m m n n n n >++++=++++----其中:(则系统的传递函数为:nn n mm m a s a s a b s b s b s R s Y s G ++++++==--......)()()(110110 传递函数也可写成分子、分母多项式因式分解的形式,即)()()())(()())(()()()(112121jn j i mi n m p s z s k p s p s p s z s z s z s k s R s Y s G +∏+∏=++++++====图1.2—1)式中:为系统的极点分母多项式的根,又称为系统的零点分子多项式的根,又称称为传递系数,------=--j i p z a b k k 04) 典型环节的传递函数一个自动控制系统,可以认为是由一些典型环节(一些元件和部件)所组成。
MATLAB/Simulink与控制系统仿真实验报告姓名:喻彬彬学号:K031541725实验1、MATLAB/Simulink 仿真基础及控制系统模型的建立一、实验目的1、掌握MATLAB/Simulink 仿真的基本知识;2、熟练应用MATLAB 软件建立控制系统模型。
二、实验设备电脑一台;MATLAB 仿真软件一个三、实验内容1、熟悉MATLAB/Smulink 仿真软件。
2、一个单位负反馈二阶系统,其开环传递函数为210()3G s s s =+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
3、某控制系统的传递函数为()()()1()Y s G s X s G s =+,其中250()23s G s s s+=+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
4、一闭环系统结构如图所示,其中系统前向通道的传递函数为320.520()0.11220s G s s s s s+=+++,而且前向通道有一个[-0.2,0.5]的限幅环节,图中用N 表示,反馈通道的增益为1.5,系统为负反馈,阶跃输入经1.5倍的增益作用到系统。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
四、实验报告要求实验报告撰写应包括实验名称、实验内容、实验要求、实验步骤、实验结果及分析和实验体会。
五、实验思考题总结仿真模型构建及调试过程中的心得体会。
题1、(1)利用Simulink的Library窗口中的【File】→【New】,打开一个新的模型窗口。
(2)分别从信号源库(Sourse)、输出方式库(Sink)、数学运算库(Math)、连续系统库(Continuous)中,用鼠标把阶跃信号发生器(Step)、示波器(Scope)、传递函数(Transfern Fcn)和相加器(Sum)4个标准功能模块选中,并将其拖至模型窗口。
MATLAB/Simulink 与控制系统仿真实验报告姓名:喻彬彬学号:K031541725实验1、MATLAB/Simulink 仿真基础及控制系统模型的建立一、实验目的1、掌握MATLAB/Simulink 仿真的基本知识;2、熟练应用MATLAB 软件建立控制系统模型。
二、实验设备电脑一台;MATLAB 仿真软件一个三、实验内容1、熟悉MATLAB/Smulink 仿真软件。
2、一个单位负反馈二阶系统,其开环传递函数为210()3G s s s =+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
3、某控制系统的传递函数为()()()1()Y s G s X s G s =+,其中250()23s G s s s+=+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
4、一闭环系统结构如图所示,其中系统前向通道的传递函数为320.520()0.11220s G s s s s s+=+++g ,而且前向通道有一个[-0.2,0.5]的限幅环节,图中用N 表示,反馈通道的增益为1.5,系统为负反馈,阶跃输入经1.5倍的增益作用到系统。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
四、实验报告要求实验报告撰写应包括实验名称、实验内容、实验要求、实验步骤、实验结果及分析和实验体会。
五、实验思考题总结仿真模型构建及调试过程中的心得体会。
题1、(1)利用Simulink的Library窗口中的【File】→【New】,打开一个新的模型窗口。
(2)分别从信号源库(Sourse)、输出方式库(Sink)、数学运算库(Math)、连续系统库(Continuous)中,用鼠标把阶跃信号发生器(Step)、示波器(Scope)、传递函数(Transfern Fcn)和相加器(Sum)4个标准功能模块选中,并将其拖至模型窗口。
实验一 控制系统的数学模型
一 实验目的
1、学习用MATLAB创建各种控制系统模型。
2、掌握传递函数模型、零-极点增益模型以及连续系统模型与离散系统模型之间的转
化,模型的简化。
二 相关理论
1传递函数描述
(1)连续系统的传递函数模型
连续系统的传递函数如下:
• 对线性定常系统,式中s的系数均为常数,且a1不等于零,这时系统在MATLAB中
可以方便地由分子和分母系数构成的两个向量唯一地确定出来,这两个向量分别用
num和den表示。
num=[b1,b2,…,bm,bm+1]
den=[a1,a2,…,an,an+1]
注意:它们都是按s的降幂进行排列的。
tf()函数可以表示传递函数模型:G=tf(num, den)
举例:
num=[12,24,0,20];den=[2 4 6 2 2];
G=tf(num, den)
(2)零极点增益模型
• 零极点模型实际上是传递函数模型的另一种表现形式,其原理是分别对原系统传递
函数的分子、分母进行分解因式处理,以获得系统的零点和极点的表示形式。
K为系统增益,zi为零点,pj为极点
在MATLAB中零极点增益模型用[z,p,K]矢量组表示。即:
z=[z1,z2,…,zm]
p=[p1,p2,...,pn]
K=[k]
zpk()函数可以表示零极点增益模型:G=zpk(z,p,k)
(3)部分分式展开
• 控制系统常用到并联系统,这时就要对系统函数进行分解,使其表现为一些基本控
制单元的和的形式。
• 函数[r,p,k]=residue(b,a)对两个多项式的比进行部分展开,以及把传函分解为微
11211121......)()()(nn
nn
mn
mm
asasasabsbsbsbsR
sC
sG
))...()(())...()(()(2121nmpspspszszszsKsG
22642202412)(23423ssss
ss
sG
分单元的形式。
• 向量b和a是按s的降幂排列的多项式系数。部分分式展开后,余数返回到向量r,
极点返回到列向量p,常数项返回到k。
• [b,a]=residue(r,p,k)可以将部分分式转化为多项式比p(s)/q(s)。
举例:
部分分式展开:
》num=[2,0,9,1];
》den=[1,1,4,4]; [r,p,k]=residue(num,den)
》r=
0.0000-0.2500i
0.0000+0.2500i
-2.0000
p=
0.0000+2.0000i
0.0000-2.0000i
-1.0000
k=
2
结果表达式
2模型的转换与连接
(1)模型的转换
• 在一些场合下需要用到某种模型,而在另外一些场合下可能需要另外的模型,这就
需要进行模型的转换。
• 模型转换的函数包括:
residue:传递函数模型与部分分式模型互换
tf2zp: 传递函数模型转换为零极点增益模型
zp2tf: 零极点增益模型转换为传递函数模型
连续系统转化为离散系统:
相当于在连续系统中加入采样开关,),,(2methodTsysdcdsys
其中:dsys表示离散系统;sys表示连续系统;T表示采样时间;method
表示逼近方式;
离散系统转化为连续系统:)(2dsyscdsys
用法举例:
1)系统的零极点增益模型转换为传递函数:
》z=[-3];p=[-1,-2,-5];k=6;
》[num,den]=zp2tf(z,p,k)
》num= 0 0 6 18 den= 1 8 17 10
2)已知部分分式:
转换为传递函数
44192)(233sss
ss
sG
12225.0225.02)(sisiis
i
sG
)5)(2)(1()3(6)(sss
s
sG
12225.0225.02)(sisiis
i
sG
》r=[-0.25i,0.25i,-2];
》p=[2i,-2i,-1];k=2;
》[num,den]=residue(r,p,k)
》num=
2 0 9 1
》den=
1 1 4 4
注意余式一定要与极点相对应。
(2)模型的连接
a并联:parallel
格式:
[num,den]=parallel(num1,den1,num2,den2)
• %将并联连接的传递函数进行相加。
b串联:series
格式:
[num,den]=series(num1,den1,num2,den2)
%将串联连接的传递函数进行相乘。
c反馈:feedback
格式:
[num,den]=feedback(num1,den1,num2,den2,sign)
• %将两个系统按反馈方式连接,一般而言,系统1为对象,系统2为反馈控制器。
sign缺省时,默认为负,即sign= -1,表示负反馈,sign= 1,表示正反馈。
d闭环:cloop(单位反馈)
格式:
[numc,denc]=cloop(num,den,sign)
• %表示由传递函数表示的开环系统构成闭环系统,sign意义与上述相同。
三 实验内容
1. 系统的传递函数为:1551315sssssG
1) 写出零极点模型,并转换为多项式传递函数模型;
2) 写出多项式模型。
2.系统结构图如下所示,求其多项式传递函数模型
3.系统结构图如下所示,求其多项式传递函数模型
210ss
5247523sss
s
u(t)
y(t)
ss2102
5247523sss
s
u(t)
y(t)
4.系统结构图如下所示,求其多项式传递函数模型
5.假设连续系统的数学模型为sessG23)2(1)(,选择采样周期为T=0.1秒,用Matlab
产生下列系统的传递函数.(注:延迟用ioDelay,如系统G的延迟为2,那么代码为:
G.ioDelay=2;)
四 实验报告要求
(1) 完成上述各题
(2) 记录与显示给定系统数学模型
s
s12
110ss
u(t)
y(t)