检测与转换技术结课业
题目:汽车速速度传感器检测系统分析设计
学生姓名:
学号:
专业名称:
日期:
汽车速速度传感器检测系统分析设计
摘要
汽车车速传感器检测系统设计是一种传感器检测装置。利用车速传感器把检测到的转速信号转变成的电压信号输送给计算机,计算机通过变频器来控制电机速度,利用传感器检测的速度值与规定值进行比较,达到对传感器的检测目的。本文介绍了车速传感器检测系统的工作原理,详细讲述了系统的组成、原理和检测方法。系统采用硬件兼软件对测量过程及测量结果进行处理。与传统的检测技术相比,此种传感器检测装置有结构简单、新颖、易于实现的特点。实践证明在检测,维修范围内都取得了良好的效果,系统具有良好的稳态精度及动态响应性能,检测实用性强、准确度高,具有广阔的应用前景。
引言
随着电子技术的发展,汽车电子化程度不断提高,通常的机械系统已经难以解决某些与汽车功能要求有关的问题,而被电子控制系统代替。传感器的作用就是根据规定的被测量的大小,定量提供有用的电输出信号的部件,亦即传感器把光、时间、电、温度、压力及气体等的物理、化学量转换成信号的变换器。传感器作为汽车电控系统的关键部件,它直接影响汽车的技术性能的发挥。
随着现代电子技术的发展,车辆电子化的程度越来越高,车辆传感器成为汽车电子控制系统的重要组成部件,也是车辆电子技术领域研究的核心技术之一。车辆内传感器的工作环境十分恶劣,因此对传感器的要求也十分严格。这些传感器必须要经受40℃~150℃的温度变化,而且要求精度高、可靠性好、反应快、抗干扰和抗振动能力强,才能准确地实时检测车辆运行的有关状态,速度传感器是列车安全行驶的重要设备,它能否稳定工作,将直接影响到车辆的正常运行。
作为现代信息技术三大支柱之一的传感器技术,已成为21世纪人们在高新技术发展方面争夺的一个制高点。在现代汽车电子控制中,传感器广泛用于发动机控制系统、底盘控制系统、车身控制系统和导航系统中,传感器的使用数量和技术水平决定了现代车辆控制系统的性能,为汽车性能的改善提供了有力保障。传感器是汽车电子控制系统的信息源,是促进汽车高档化、电子化、自动化的关键
部件,也是汽车电子技术领域研究的核心内容之一。
普通汽车上大约装有10-20只传感器,高级豪华轿车则更多。传感器能及时识别外界和系统本身的变化,对温度、压力、位置、转速、体积流量等信息进行实时、准确的测量,并将信息传递给电脑进行处理,从而实现汽车各系统的电子控制。现代社会对车辆性能的要求越来越高,促使汽车传感器技术不断发展,今后汽车传感器的发展趋势是实现微型化、智能化和多功能化,开发新材料、新工艺和新型传感器。
1 工作原理
1.1 汽车车速传感器的工作原理
车辆自动强制限速装置,包括传感器、控制电路和操控机构。车辆限速器分为两种:一种是在车辆超速时发出语音警报,提醒驾驶者减速;另一种限速器是在车辆超过限定速度后,通过车载电脑发出指令,强制降低车辆行驶速度。
车辆遥控自动限速器由发射器和接收器组成,采用遥控专用编码集成块。通过对遥控限速进行编码,使每一组编码对应一种车速限制,并利用设置在路码表与之刻度同步上的光电传感器进而控制执行继电器切断和接续汽车起动、点火和熄火回路,从而达到控制车速的目的。限速器的发射器包括固定发射器和移动发射器,固定发射器安装在需限速道路路段的出入口处,移动发射器由执法人员掌握,接收器安装在各受控车辆的驾驶室内。
车辆智能限速器由汽车传感器、微电脑速度控制仪和智能机械手组成。其工作原理是:当车辆速度低于设定值时,控制仪不启动机械手,车辆行驶如常;当车辆速度临界设定值时,控制器立即启动机械手拉起油门,等同于司机放松油门,汽车只能滑行减速不能加速,从而使车速得到控制;当车辆速度低于设定值时,控制器立即反向放松油门,使油门恢复如初。由于它的科学控速原理,车辆限速时呈自然、平稳状态,不易被站立的乘客察觉。
电子限速的作用是限制车速过高,防止因车速过高造成事故。电子限速器可以实时监测车辆的速度,当车速达到一定值的时候,它就会控制供油系统和发动机的转速,这时即使踏下油门踏板,供油系统也不会供油。
1.2 汽车车速传感器
1.2.1 霍尔式车速传感器
霍尔效应是一种磁电效应,是德国物理学家霍尔1879年研究载流导体在磁场中受力的性质时发现的。流垂直于外磁场方向通过导体时,在垂直于磁场和电流方向的导体的两个端面之间出现电势差的现象称为霍尔效应,该电势差称为霍尔电势差(霍尔电压)。根据霍尔效应,人们用半导体材料制成霍尔元件,它具有对磁场敏感、结构简单、体积小、频率响应宽、输出电压变化大和使用寿命长等优点,因此,在测量、自动化、计算机和信息技术等领域得到广泛的应用。
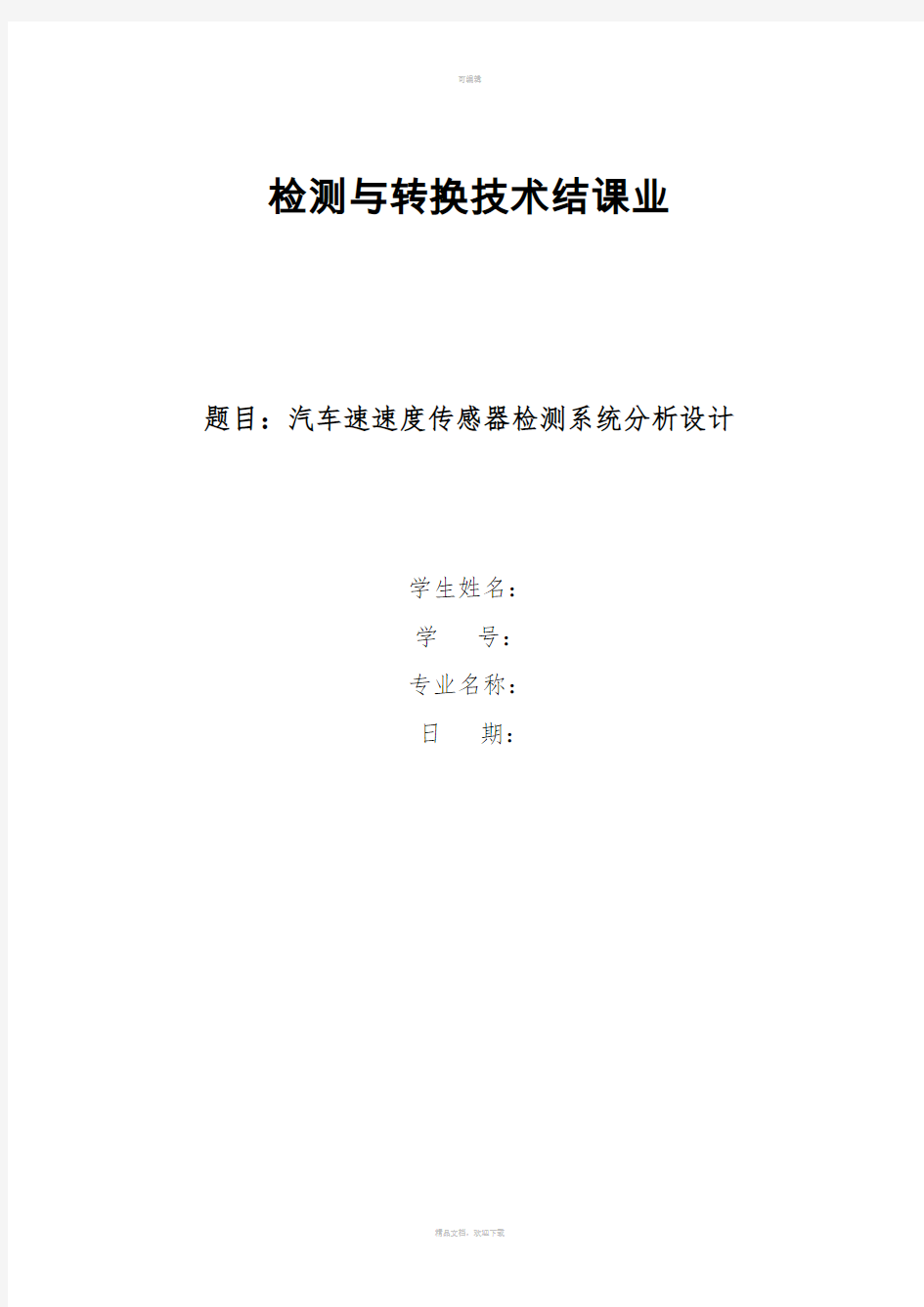
霍尔效应在应用技术中特别重要,如果对位于磁场(B)中的导体(d)施加一个电压(V),该磁场的方向垂直于所施加电压的方向,那么则在既与磁场垂直又和所施加电流方向垂直的方向上会产生另一个电压(UH),人们将这个电压叫做霍尔电压,产生这种现象被称为霍尔效应。好比一条路, 本来大家是均匀的分布在路面上, 往前移动。当有磁场时, 大家可能会被推到靠路的右边行走。故路(导体)的两侧, 就会产生电压差。这个就叫“霍尔效应”。其原理图如下图1所示。
图1 霍尔效应原理图
霍尔传感器常用来检测车辆上车速和转速的信号。霍尔传感器由传感头和齿
心组成,其传感头由永磁体、霍尔元件和电子电路等组成。霍尔车速传感器的工作原理:在齿蹦转动的过程中,使得通过霍尔元件的磁力线密度发生变化,从而引起霍尔电压的变化,霍尔元件将输出一准正旋波电压,此信号由电子电路转换成表中的脉冲电压。由霍尔原理可知,霍尔传感器的输出电压与被测物体的运动速度无关,因此它的高、低、速特性都很好,若用其测量物体的转速,其下限速度可以接近于0,上限速度从理论上讲可以不受限制,即它可以满足工程中各种运行速度的测量。霍尔轮速传感器还有1000Km/h ,以下优点:一是输出信号电压幅值不受转速的影响;二是频率响应高,其幅频响应可高达,相当于车速为时所检测的信号频率;三是抗电磁波干扰能力强。正因为如此,车辆上的车速传感器大都采用霍尔式传感器。
霍尔元件产生的霍尔电压U 的大小为:d
ne IB U 0=
式中: I :控制电流,A ;
0e :带电粒子的电荷,0e =C 19106.1-?;
B :磁感应强度,T ;
d :半导体的厚度,mm ;
n :电子浓度。
当齿圈转到两个齿轮都与霍尔元件对正时,永磁体转到霍尔元件的磁力线分
散,磁场较弱,输出的霍尔电压较小;当齿圈转到一个齿与霍尔元件对正时,永磁体转到霍尔元件的磁力线集中,磁场较强,输出的霍尔电压较大。齿轮转动过程中,使得通过霍尔元件的磁力线密度发生变化,从而引起霍尔电压的变化,霍尔元件将输出一准正弦波电压,此信号由电子电路转换成表中的脉冲电压。
1.2.2 磁电式车速传感器
磁电式传感器与霍尔式传感器是车辆上常用来检测车速和转速的信号。磁电
式传感器是利用电磁感应原理工作的,即:当闭合回路中的磁通量发生变化时,回路中就产生感应电动势,其大小与磁通量的变化率有关,即dt
d N E φ-= : E :感应电动势;
N:导电回路中线圈的匝数;
dt d φ
:穿越线圈磁通量的变化率; 通过改变
dt d φ就可以改变感应电动势E 的变化,而在实际应用过程当中,改变dt
d φ的方式有3种,即移动线圈、移动磁铁或改变磁阻,与之对应的分别称为动圈式磁电传感器、动铁式磁电传感器及磁阻式磁电传感器。而在车辆上应用最广的是磁阻式磁电传感器。下面以磁阻式磁电传感器为例来讲磁电式传感器在车辆上的应用情况。磁阻式磁电传感器在车辆上的应用可以用来检测发动机转速和车轮转速,一般由传感头和齿圈组成,而传感头主要由永磁体、磁极和感应线圈组成。当齿圈的齿隙与传感器的极轴端部相对时,极轴端部与齿圈之间的空气间隙最大,磁阻也最大,通过感应线圈的磁通量最小。而当齿圈的齿顶与传感器的极轴端部相对应时,极轴端部与齿圈之间的空气间隙最小,磁阻也最小,通过感应线圈的磁通量最大。当齿圈随同车轮转动时,齿圈的齿顶和齿隙就交替地与传感器极轴顶部相对,传感器感应线圈周围的磁场随之发生强弱交替变化,在感应线圈中就会感应出交变电动势,其频率与齿圈的齿数和转速成正比。
磁电式轮速传感器结构简单、成本低、工作稳定可靠,几乎不受温度、灰尘
等环境因素的影响,缺点是:一是输出信号的幅值随转速的变化而变化。若车速过慢,其输出信号低于1V ,电控单元就无法检测;二是响应频率不高。当转速过高时,传感器的频率响应跟不上;三是抗电磁波干扰能力差。目前,国内外ABS 系统的控制速度范围一般为15km/h ~160km/h ,今后要求控制速度范围扩大到8km/h ~260km/h 以至更大,显然磁电式轮速传感器很难适应。
1.3.1 ABS 控制原理
汽车ABS(Antilock Braking System)是改善汽车主动安全性的重要装置,
通过调节制动力,使汽车获得良好的制动效能并保持较高方向操纵稳定性。ABS 最重要的功能并不是为了缩短制动距离,而是为了能够尽量保持制动时汽车的方向稳定性。ABS 起作用时,车轮与路面的摩擦属滚动摩擦,它会充分利用车轮与路面之间的最大附着力进行制动,从而提高制动加速度,缩短制动距离,但最重要的还是保证汽车的方向稳定性。ABS 工作时就相当于以很高的频率进行点刹。于是,在紧急情况下如果将制动踏板踩到底,肯定会感到制动踏板在颤动,同时也会听到制动总泵发出的“哒哒”声,这便是ABS 在正常工作。制动总泵不断调整制动压力,从而对制动踏板产生连续的反馈力。
防抱死制动系统(简称ABS )是一种防止制动过程车轮抱死的车辆主动安全
装置。 ABS 是改善车辆主动安全性能的重要装置,其核心是通过调节制动车轮滑移率,使得在制动过程中,车轮滑移率尽量在附着系数相对应的滑移率区域,从而获得尽量大的制动效能,并保持较高的方向操纵性能[6]。为描述车轮制动过程中与道路接触的状态,引入滑移率:
ν
ωνννωR s -=-=1 (1) 式中:R 为车轮半径,ω为车轮制动时转速,轮速ωνωR =,ν为车速。
通常,车辆要经过大量的道路试验,才能获得ABS 制动时车速变化规律和其相应的控制逻辑。基于轮缸压力函数的制动时参考车速计算方法,适合制动时有稳定压力源的液压制动系统
。选择合适的加速度传感器可以检测车辆制动过程的车速。
dt dt d t
?-=00ννν (2) 制动前00ωνR =
根据制动时传感器给出的轮速和加速度,用梯形公式计算出不同时刻的速度值。由加速度求车速的表达式为:
(3)
式中:t ?为采样周期,1-j a 、j a 为第1-j 、j 时刻测量的加速度值。
ABS 系统在制动过程中通过传感器感知车轮与路面的滑移,由ABS 电控单元做出判断,并通过电磁阀调整制动力的大小,使轮胎滑移率保持在一个理想的范围(10%~20%),来保证车辆制动时有较大的纵向制动和抗侧向外力的能力,防止可能发生的后轮侧滑,甩尾,提高车辆在制动过程中的方向稳定和转向操纵的能力,并能提高附着系数利用率,缩短制动距离,减少轮胎磨损。电子控制防抱死系统是目前提高车辆行驶安全性的有效措施之一。
汽车驱动防滑系统ASR (Automobile dynamic-control system )是在汽车起步和加速时将滑移率控制在一定范围(5%~15%)内,防止驱动轮快速滑动,提高汽车的驱动力。ASR 在控制中,通过轮速传感器反馈来的信号经控制单元处理后发出指令,调节发动机的输出转矩,从而调节驱动轮的驱动转矩。目前ASR 的装备大多是在ABS 系统增设一部分部件的方法来实现,可看成是对ABS 系统的完善和补充。
1.3.2 ECU 控制原理
车辆电子控制器常称为ECU ,也叫电子控制单元。它是发动机的一种综合电
子控制装置。其核心部件是电脑(ECU 或电子计算机),简称微处理机或微机。电子控制器包括硬件和软件两部分控制装置是变速器的中央控制单元,该装置由一个电子控制单元和一个电动液压控制单元组成,它安装在变速器内并浸在DSG 机油中。所有传感器和其他控制单元的信号都汇集到此,并由它分析后,向各个执
t a a i j j j i ?-+=∑=-1102νν
行器发出指令并监控