直线电机主要应用于三个方面: 一是应用于自动控制系统,这类应用场合比较多; 二是作为长期连续运行的驱动电机; 三是应用在需要短时间、短距离内提供巨大的直线运动能的装置中。 在实际工业应用中的稳定增长,证明直线电机可以放心的使用。 本期讨论直线电机的运用 Linear motor: 直线伺服电机应用 昆山佳德锐自动化系统销售中心 交流论坛: www.hilife.me 工业之美
什么是直线电机特点 1.什么是直线电机 直线电动机(或称线性马达)(Linear motor)是电动机的一种,其原理与传统的电动机不同,直线电机是直接把输入电力转化为线性动能,与传统的扭力及旋转动能不同。直线电机又分为低加速及高加速两大类,当中低加速直线电机适用于磁悬浮列车及 其他地面交通工具,而高加速直线电机能把物件在短时间内加至极高速度,适用于粒子 加速器、制造武器等。2.直线电机是如何工作的 下面简单介绍直线电机类型 和他们与旋转电机的不同,最 常用的直线电机类型是平板式, U型槽式和管式。线圈的典型组 成是三相,有霍尔元件实现无刷 换相,直线电机用HALL换相的 相序和相电流。 直线电机经常简单描述为旋转电机被展平,而工作原理相同。动子(forcer,rotor) 是用环氧材料把线圈压缩在一起制成的,而且磁轨是把磁铁(通常是高能量的稀土磁铁)固 定在钢上.电机的动子包括线圈绕组,霍尔元件电路板,电热调节器(温度传感器监控温度) 和电子接口。在旋转电机中,动子和定子需要旋转轴承支撑动子以保证相对运动部分的气隙 (airgap)。同样的,直线电机需要直线导轨来保持动子在磁轨产生的磁场中的位置。和旋 转伺服电机的编码器安装在轴上反馈位置一样,直线电机需要反馈直线位置的反馈装置--直 线编码器,它可以直接测量负载的位置从而提高负载的位置精度。 3.直线电机分类 管状直线电机 圆柱形动磁体直线电机的磁路与动磁执行器相似。区别在于线圈可以复制以 增加行程。典型的线圈绕组是三相组成的,使用霍尔装置实现无刷换相。推力 线圈是圆柱形的,沿磁棒上下运动。 U型直线电机 U型槽式直线电机有两个介于金属板之间且都对着线圈动子的平行磁轨。动子由导轨系统 支撑在两磁轨中间。动子是非钢的,意味着无吸力且在磁轨和推力线圈之间无干扰力产生。 非钢线圈装配具有惯量小,允许非常高的加速度。线圈一般是三相的,无刷换相。可以用空 气冷却法冷却电机来获得性能的增强。也有采用水冷方式的。这种设计可以较好地减少磁通 泄露因为磁体面对面安装在U形导槽里。这种设计也最小化了强大的磁力吸引带来的伤害 平板直线电机 有三种类型的平板式直线电机(均为无刷):无槽无铁芯,无槽有铁芯和有槽有铁芯。选 择时需要根据对应用要求的理解。无槽无铁芯平板电机是一系列coils安装在一个铝板上。由 于FOCER没有铁芯,电机没有吸力和接头效应(与U形槽电机同)。该设计在一定某些应用中有 助于延长轴承寿命。动子可以从上面或侧面安装以适合大多数应用。这种电机对要求控制速度 平稳的应用是理想的。如扫描应用,但是平板磁轨设计产生的推力输出最低。通常,平板磁轨 具有高的磁通泄露。 无槽有铁芯:无槽有铁芯平板电机结构上和无槽无铁芯电机相似。除了铁芯安装在钢叠片 结构然后再安装到铝背板上,铁叠片结构用在指引磁场和增加推力。磁轨和动子之间产生的吸 力和电机产生的推力成正比,迭片结构导致接头力产生。 无槽有铁芯:这种类型的直线电机,铁心线圈被放进一个钢结构里以产生铁芯线圈单元。 铁芯有效增强电机的推力输出通过聚焦线圈产生的磁场。铁芯电枢和磁轨之间强大的吸引力可 以被预先用作气浮轴承系统的预加载荷。这些力会增加轴承的磨损,磁铁的相位差可减少接头力。 加工产品对比
中石化 云计算平台工程技术方案 二O一六年四月
目录第1章.基本情况6 1.1.项目名称6 1.2.业主单位6 1.3.项目背景6 1.3.1.XX技术发展方向6 1.3. 2.有关XX公开的相关要求7 1.4.建设规模7 1.5.投资概算10 1.6.设计依据10 1.7.设计范围10 1.8.设计分工11 第2章.现状及需求分析11 2.1.项目意义及建设必要性11 2.2.现状分析13 2.3.需求分析13 2.3.1.长期需求13 2.3.2.本期需求14 第3章.总体设计16 3.1.建设目标16 3.1.1.预期总目标16 3.1.2.阶段性目标17
3.2.建设内容18 3.3.系统的总体结构18 3.3.1.设计原则18 3.3.2.XX本土化战略错误!未定义书签。 3.3.3.建设思路20 3.3. 4.总体拓扑结构22 3.4.信息的分类编码体系25 3.5.质量保证体系26 第4章.建设方案27 4.1.网络资源池28 4.1.1.组网物理拓扑图28 4.1.2.网络负载均衡设计30 4.1.3.网络虚拟化设计32 4.1.4.IP地址及DNS规划36 4.1. 5.网络端口资源估算41 4.2.计算资源池41 4.2.1.计算资源池架构41 4.2.2.应用系统分析42 4.2.3.计算资源池建议配置与选型建议44 4.2.4.计算资源池部署47 4.2. 5.虚拟化软件选型分析48 4.3.云计算管理平台51
4.3.1.云资源管理平台建设方案52 4.3.2.云运营管理平台建设方案61 4.4.云计算安全防护方案71 4.4.1.云计算平台安全威胁71 4.4.2.云计算平台安全防护目标73 4.4.3.云计算平台安全架构74 4.4.4.IaaS层安全74 4.4. 5.PaaS层安全89 4.4.6.SaaS层安全90 4.4.7.公共安全92 4.4.8.安全管理制度98 4.4.9.云安全服务100 4.5.机房方案100 4.5.1.机房设备集中管理100 4.5.2.布线系统101 4.5.3.机房系统102 4.5.4.UPS配置方案104 4.6.标准化工作109 4.6.1.标准规范建设的原则109 4.6.2.标准规范的总体框架110 第5章.设备配置要求112 第6章.项目实施与运行维护117
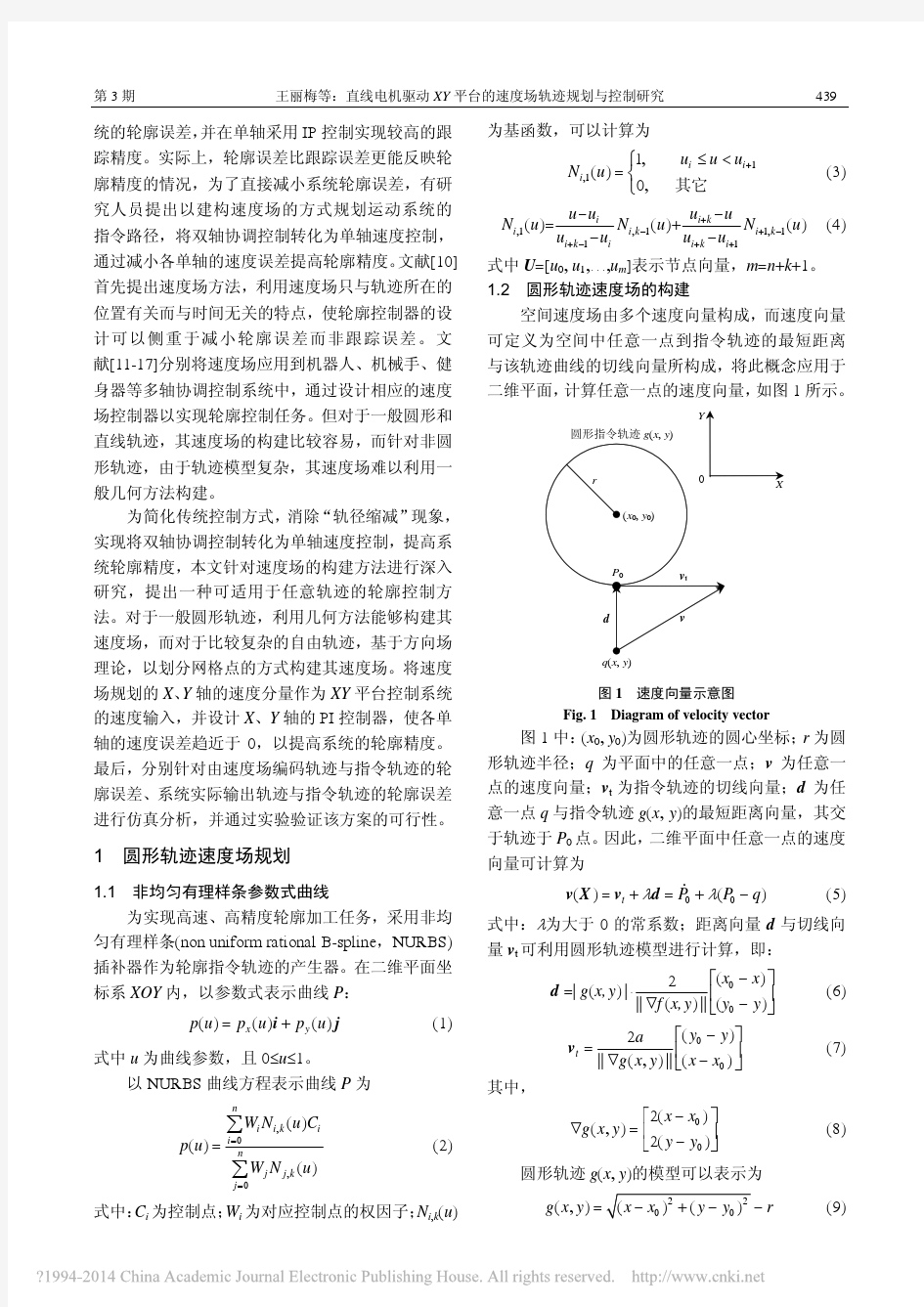
直线电机的应用 直线电机凭借高速度、高加速、高精度及行程不受限制等特性在物流系统、工业加工与装配、信息及自动化系统、交通与民用以及军事等领域发挥着十分重要的作用。 直线电机主要应用场合:一是应用于自动控制系统,这类应用场合比较多;其次是作为长期连续运行的驱动电机;三是应用在需要短时间、短距离内提供巨大的直线运动能的装置中。 直线电机可以在几秒钟内把一架几千公斤重的直升飞机拉到每 小时几百公里的速度,它在真空中运行时,其时速可达几千上万公里。在军事上,人们利用它制成各种电磁炮,并试图将它用于导弹、火箭的发射;在工业领域,直线电机被用于生产输送线,以及各种横向或垂直运动的一些机械设备中;直线电机除具有高速、大推力的特点以外还具有低速、精细的另一特点,例如,步进直线电机,它可以做到步距为1μm的精度,因此,直线电机又被应用到许多精密的仪器设备中,例如计算机的磁头驱动装置、照相机的快门、自动绘图仪、医疗仪器、航天航空仪器、各种自动化仪器设备等。除此之外,直线电机还被用于各种各样的民用装置中,如电动门、电动窗、电动桌、椅的移动,门锁、电动窗帘的开、闭等等,尤其在交通运输业中,人们利用直线电机制成了时速达500km以上的磁浮列车。
直线电机可以认为是旋转电机在结构方面的一种变形,它可以看作是一台旋转电机沿其径向剖开,然后拉平演变而成。近年来,随着自动控制技术和微型计算机的高速发展,对各类自动控制系统的定位精度提出了更高的要求,在这种情况下,传统的旋转电机再加上一套变换机构组成的直线运动驱动装置,已经远不能满足现代控制系统的要求,为此,近年来世界许多国家都在研究、发展和应用直线电机,使得直线电机技术发展速度加快,应用领域越来越广。 直线电机的优点是:结构简单、反应速度快、灵敏度高、随动性好、密封性好、不怕污染、适应性强(由于直线电机本身结构简单,又可做到无接触运行,因此容易密封,各部件用尼龙浸渍后,采用环氧树脂加以涂封,这样它就不怕风吹雨打,或有毒气体和化学药品的侵蚀,在核辐射和液体物质中也能应用)、工作稳定可靠、寿命长(直线电机是一种直接传动的特种电机,可实现无接触传递,故障少,几乎不需要维修,又不怕振动和冲击)、额定值高(直线电机冷却条件好,特别是长次级接近常温状态,因此线负荷和电流密度可以取得很高)、有精密定位和自锁的能力(和控制系统相配合,可做到0.001mm的位移精度和自锁能力)。 直线电机能直接产生直线运动,这一点对直线运动机械设计者和使用者有很大的吸引力。不少直线运动的机械是由旋转电机传动的,必须配置由旋转运动变为直线运动的机械传动装置,使得整个装置机构庞大,成本较高和效率较低。采用直线感应电机,不但省去了机械
直线电机基础 编辑本段直线电机也称线性电机,线性马达,直线马达 在实际工业应用中的稳定增长,证明直线电机可以放心的使用。下面简单介绍直线电机类型和他们与旋转电机的不同. 最常用的直线电机类型是平板式和U 型槽式,和管式。线圈的典型组成是三相,有霍尔元件实现无刷换相.图示直线电机用HALL换相的相序和相电流. 该图直线电机明确显示动子(forcer, rotor)的内部绕组.磁鉄和磁轨.动子是用环氧材料把线圈压成的。而且,磁轨是把磁铁固定在钢上。 直线电机在过去的10年,经实践上引人注目的增长和工业应用的显著受益才真正成熟。 直线电机经常简单描述为旋转电机被展平,而工作原理相同。动子(forcer, rotor) 是用环氧材料把线圈压缩在一起制成的.而且,磁轨是把磁铁(通常是高能量的稀土磁铁)固定在钢上.电机的动子包括线圈绕组,霍尔元件电路板,电热调节器(温度传感器监控温度)和电子接口。在旋转电机中,动子和定子需要旋转轴承支撑动子以保证相对运动部分的气隙(air gap)。同样的,直线电机需要直线导轨来保持动子在磁轨产生的磁场中的位置。和旋转伺服电机的编码器安装在轴上反馈位置一样,直线电机需要反馈直线位置的反馈装置--直线编码器,它可以直接测量负载的位置从而提高负载的位置精度。 直线电机的控制和旋转电机一样。象无刷旋转电机,动子和定子无机械连接(无刷),不象旋转电机的方面,动子旋转和定子位置保持固定,直线电机系统可以是磁轨动或推力线圈动(大部分定位系统应用是磁轨固定,推力线圈动)。用推力线圈运动的电机,推力线圈的重量和负载比很小。然而,需要高柔性线缆及其管理系统。用磁轨运动的电机,不仅要承受负载,还要承受磁轨质量,但无需线缆管理系统。 相似的机电原理用在直线和旋转电机上。相同的电磁力在旋转电机上产生力矩在直线电机产生直线推力作用。因此,直线电机使用和旋转电机相同的控制和可编程配置。直线电机的形状可以是平板式和U 型槽式,和管式.哪种构造最适合要看实际应用的规格要求和工作环境。 编辑本段圆柱形动磁体直线电机 圆柱形动磁体直线电机动子是圆柱形结构。沿固定着磁场的圆柱体运动。这种电机是最初发现的商业应用但是不能使用于要求节省空间的平板式和U 型槽式直线电机的场合。圆柱形动磁体直线电机的磁路与动磁执行器相似。区别在于线圈可以复制以增加行程。典型的线圈绕组是三相组成
云计算平台系统建设项目 设计方案
1.1设计方案 1.1.1平台架构设计 **高新区云计算平台将服务器等关键设备按照需要实现的功能划分为两个层面,分别对应业务层和计算平台层。 业务层中,功能区域的划分一般都是根据安全和管理需求进行划分,各个部门可能有所不同,云数据中心中一般有公共信息服务区(DMZ区)、运行管理区、等保二级业务区、等保三级业务区、开发测试区等功能区域,实际划分可以根据业务情况进行调整,总的原则是在满足安全的前提下尽量统一管理。 计算平台层中分为计算服务区和存储服务区,其中计算服务区为三层架构。计算服务区部署主要考虑三层架构,即表现层、应用层和数据层,同时考虑物理和虚拟部署。存储服务区主要分为IPSAN、FCSAN、NAS 和虚拟化存储。 云计算平台中计算和存储支持的功能分区如下图所示:
图云计算平台整体架构 图平台分层架构
基础架构即服务:包括硬件基础实施层、虚拟化&资源池化层、资源调度与管理自动化层。 硬件基础实施层:包括主机、存储、网络及其他硬件在内的硬件设备,他们是实现云服务的最基础资源。 虚拟化&资源池化层:通过虚拟化技术进行整合,形成一个对外提供资源的池化管理(包括内存池、服务器池、存储池等),同时通过云管理平台,对外提供运行环境等基础服务。 资源调度层:在对资源(物理资源和虚拟资源)进行有效监控管理的基础上,通过对服务模型的抽取,提供弹性计算、负载均衡、动态迁移、按需供给和自动化部署等功能,是提供云服务的关键所在。 平台即服务:主要在IaaS基础上提供统一的平台化系统软件支撑服务,包括统一身份认证服务、访问控制服务、工作量引擎服务、通用报表、决策支持等。这一层不同于传统方式的平台服务,这些平台服务也要满足云架构的部署方式,通过虚拟化、集群和负载均衡等技术提供云状态服务,可以根据需要随时定制功能及相应的扩展。 软件即服务:对外提供终端服务,可以分为基础服务和专业服务。基础服务提供统一门户、公共认证、统一通讯等,专业服务主要指各种业务应用。通过应用部署模式底层的稍微变化,都可以在云计算架构下实现灵活的扩展和管理。 按需服务是SaaS应用的核心理念,可以满足不同用户的个性化需求,如通过负载均衡满足大并发量用户服务访问等。 信息安全管理体系,针对云计算平台建设以高性能高可靠的网络安
云计算平台详细方案设计
第1章数据中心云平台设计 1.1云平台总体架构设计 基于当前IT基础架构的现状,未来云平台架构必将朝着开放、融合的方向演进,因此,云平台建议采用开放架构的产品。目前,越来越多的云服务提供商开始引入Openstack,并投入大量的人力研发自己的openstack版本,如VMware、华三等,各厂商基于Openstack架构的云平台其逻辑架构都基本相同,具体参考如下: 图2-1:云平台逻辑架构图 从上面的云平台的逻辑架构图中可以看出,云平台大概分为三层,即物理资源池、虚拟抽象层、云服务层。 1、物理资源层 物理层包括运行云所需的云数据中心机房运行环境,以及计算、存储、网络、安全等设备。 2、虚拟抽象层
资源抽象与控制层通过虚拟化技术,负责对底层硬件资源进行抽象,对底层硬件故障进行屏蔽,统一调度计算、存储、网络、安全资源池。 3、云服务层 云服务层是通过云平台Portal提供IAAS服务的逻辑层,用户可以按需申请相关的资源,包括:云主机、云存储、云网络、云防火墙与云负载均衡等。 基于未来云平台的发展趋势及华北油田数据中心云平台的需求,华北油田的云平台应具备异构管理能力,能够对多种虚拟化平台进行统一的管理、统一监控、统一运维,同时,云平台能够基于业务的安全需要进行安全防护,满足监控部门提出的安全等级要求。下面是本次云平台架构的初步设计,如下图所示: 图2-2:云平台总体架构图 1.2资源池总体设计 从云平台的总体架构可以看出,资源池是云平台的基础。因此,在构建云平台的过程中,资源的池化迈向云的是第一步。
目前,计算资源的池化主要包括两种,一种是X86架构的虚拟化,主要的虚拟化平台包括VMware、KVM、Hyper-V等;另一种是小型机架构的虚拟化,主要的虚拟化平台为PowerVM,这里主要关注基于X86架构的虚拟化。 存储资源的池化也包括两种,一种是当前流行的基于X86服务本地磁盘实现的分布式存储技术,如VMware VSAN、华为FusionStorage、华三vStor等;另一种是基于SAN 存储实现的资源池化,实现的方式是利用存储虚拟化技术,如EMC VPLEX、华为VIS(虚拟化存储网关型)和HDS VSG1000(存储型)等。这两种方式分别适用于不同的场景,对于普通的数据存储可以尝试使用分布式存储架构,如虚拟机文件、OLAP类数据库等,而对于关键的OLTP类数据库则建议采用基于SAN存储的架构。 网络资源池化也包括两种,一种是基于硬件一虚多技术实现的网络资源池,如华为和华三的新型的负载均衡、交换机、防火墙等设备;另一种是基于NFV技术实现的网络资源池。这两种方式分别适用于不同的场景,对于南北向流量的网络服务建议采用基于硬件方式实现的网络资源池化,而对于东西向流量的网络服务建议采用基于NFV技术实现的网络资源池化。 图2-2-1:华北油田资源池总体设计示例
直线电机位置控制算法及仿真 1 绪论 1.1 研究背景及意义 随着工业机械自动化程度的不断升级,有力的带动了上游直线电机在中国的快速成长,国外品牌纷纷加大对中国市场的投入力度,永磁同步直线电机是一种将电能直接转化是动能的转化装置,省去了中间的转换机构,消除了机械转动链的影响,具有速度快,推力大,精度高等诸多优点,因此,广泛应用于精密和高速运行等领域。但是永磁同步直线电机是一个典型的非线性多变量系统,许多非线性因素的存在都会影响到永磁同步直线电机系统的控制性能,如没有知的负载和摩擦等。传统的PID控制方法已经不能满足于永磁机电动机的高精度场合,因此如何设计高性能的直线电机位置控制算法一直以来都是控制领域的热点问题之一。 因此,在传统PID控制方式下,针对多变量、非线性、强耦合的永磁同步直线电机系统设计了一种滑模位置控制器,弥补了常规PID控制跟踪精度不高的缺点。滑模控制具有控制精度高、抗干扰能力强、适用范围广的等优点,因此滑模控制方法已经成是永磁同步直线电机领域重点关注问题,相关研究人员对此进行了深入研究。 1.2 国内外研究现状 直线电机的研究现状 1840年Wheatsone开始提出与制作了略具雏形的直线电机。从那时至今,在160多年的历史记载中,直线电机经历了三个时期。 1840-1955年是探索实验时期: 从1840年到1955年的116年期间,直线电机从设想到实验到部分实验性应用,经历了一个不断探索,屡遭失败的过程。自从Wheatsone提出和试制了直线电机以后,最早明确的提到直线电机文章的是1890年美国匹兹堡市的市长,在
他写的一篇文章中,首先明确的提到了直线电机以及它的专利。然而,由于当时的制造技术、工程材料以及控制技术的水平,在经过断断续续20多年的顽强努力后,最终却没有能获得成功。 至1905年,曾有两人分别建议将直线电动机作为火车的推进机构,一种建议是将初级放在轨道上,另一种建议是将初级放在车辆底部。这些建议无疑是给当时直线电机研究领域的科研人员的一剂兴奋剂,以致许多国家的科研人员都投入了这些研究工作。1917年出现了第一台圆筒形直线电动机,事实上那是一种具有换接初级线圈的直流磁阻电动机,人们试图把它作是导弹发射装置,但其发展并没有超出模型阶段。 至此,从1930-1940年期间,直线电机进入了实验研究阶段,在这个阶段中,科研人员获驭了大量的实验数据,从而对已有理论有了更深一层的认识,奠定了直线电机在今后的应用基础。 从1940-1955年期间世界一些发达国家科研人员,在实验的基础上,又进行了一些实验应用工作。1945年,美国西屋电气公司首先研制成功的电力牵引飞机弹射器,它以7400kW的直线电动机是动力,成功的用4.1s的时间将一架重4535kg的喷气式飞机在165m的行程内由静止加速的188km/h的速度,它的试验成功,使直线电动机可靠性好等的优点受到了应有的重视,随后,美国利用直线电机制成的、用作抽汲钾、钠等液态金属的电磁泵,是的是核动力中的需要。1954年,英国皇家飞机制造公司利用双边扁平型直流直线电机制成了发射导弹的装置,其速度可达1600km/h。在这个阶段中,尤需值得一提的是,直线电机作是高速列车的驱动装置得到了各国的高度重视并计划予以实施。 在1840-1955年期间,是直线电机探索实验和部分实验应用时期,在直线电机与旋转电机的相互竞争中,由于直线电机的成本和效率方面没有能够战胜旋转电机,或者说,直线电机还没能找到它的专属领域,以及直线电机在设计方面也没有突破性的成功,所以直线电机在这一时期始终没有能得到有效的推广。 1956-1970年是开发应用时期: 自1955年以来,直线电机进入了全面的开发阶段,特别是该时期的控制技术和材料的惊人发展,更加助长了这种势头。在这段时期,申请直线机的专利件数也开始急速增加,该时期直线电机专利的增长率超过了所有其他技术领域的平
如何进行直线电机选型
————————————————————————————————作者:————————————————————————————————日期:
直线电机选型 ——最大推力和持续推力计算
目录 直线电机选型 (3) ——最大推力和持续推力计算 (3) 概述 (5) 三角模式 (5) 梯形模式 (5) 持续推力 (6) 计算公式 (6) 例子 (7)
概述 直线电机的选型包括最大推力和持续推力需求的计算。 最大推力由移动负载质量和最大加速度大小决定。 推力= 总质量x 加速度+ 摩擦力+ 外界应力 例子:当移动负载是2.5千克(包含动子),所需加速度为30m/s2时,那么,电机将产生75N 的力(假设,摩擦力和外界应力忽略不计)。 通常,我们不知道实际加速度需求,但是,我们有电机运行实际要求。给定的运行行程距离和所需要的行程时间,由此可以计算出所需要的加速度。一般来说,对于短行程,推荐使用三角形速度模式,即无匀速运动,长行程的话,梯形速度模式更有效率。在三角形速度模式中,电机的运动是没有匀速段的。 三角模式 加速度为Acceleration = 4 x Distance / Travel_Time2 梯形模式 需要提前设置匀速的速度值,由此可以推算出加速度。 加速度= 匀速/ (运动时间–位移/ 匀速)
同理,减速度的计算与加速度的计算是类似的,特殊情况是存在一个不平衡的力(例如重力)作用在电机上。 通常情况下,为了维持匀速过程和停滞阶段,摩擦力和外界应力也要考虑进来,为了维持匀速,电机会对抗摩擦力和外界应力,电机停止时则会对抗外界应力。 持续推力 计算公式 持续推力的计算公式如下: RMSForce = 持续推力 Fa = 加速度力 Fc = 匀速段力 Fd = 减速度力 Fw = 停滞力 Ta = 加速时间 Tc = 匀速时间 Td = 减速时间 Tw = 停滞时间 又最大推力和持续推力进行电机的选择。一般情况下,应该将安全系数设置为20~30%,从而抵消外界应力和摩擦力。
国家质检中心郑州综合检测基地云计算平台建设项目(招标编号:豫财招标采购-2015-112) 云计算平台设计方案 二〇一五年二月
目录 第一章项目概述与背景 .................................. 错误!未定义书签。第二章现状与需求分析 .................................. 错误!未定义书签。 2.1各业务系统现状.................................. 错误!未定义书签。 2.2.本期项目主要需求.............................. 错误!未定义书签。 ............................................................. 错误!未定义书签。 ............................................................. 错误!未定义书签。 ............................................................. 错误!未定义书签。 ............................................................. 错误!未定义书签。 ............................................................. 错误!未定义书签。第三章设计原则与目标 .................................. 错误!未定义书签。 3.1设计原则.............................................. 错误!未定义书签。 3.2建设目标.............................................. 错误!未定义书签。第四章质监云计算平台设计 .......................... 错误!未定义书签。 4.1总体设计思想...................................... 错误!未定义书签。 4.2总体架构设计...................................... 错误!未定义书签。 4.3计算虚拟化.......................................... 错误!未定义书签。 4.4网络虚拟化.......................................... 错误!未定义书签。 4.5存储虚拟化.......................................... 错误!未定义书签。 ............................................................. 错误!未定义书签。 ............................................................. 错误!未定义书签。 4.6云资源自动调度设计.......................... 错误!未定义书签。
《数控技术》大作业二 1.综述 直线电机的结构可以看作是将一台旋转电机沿径向剖开,并将电机的圆周展开成直线而形成的。其中定子相当于直线电机的初级,转子相当于直线电机的次级,当初级通入电流后,在初次级线圈之间的气隙中产生行波磁场,在行波磁场与次级永磁体的作用下产生驱动力,从而实现运动部件的直线运动。 直线电机的工作原理设想把一台旋转运动的感应电动机沿着半径的方向剖开,并且展平,这就成了一台直线感应图电动机。 初级做得很长,延伸到运动所需要达到的位置,也可以把次级做得很长;既可以初级固定、次级移动,也可以次级固定、初级移动.通入交流电后在定子中产生的磁通,根据楞次定律,在动体的金属板上感应出涡流。设产生涡流的感应电压为E,金属板上有电感L和电阻R,涡流电流和磁通密度将(费来明法则)产生连续的推力F。 2.工作原理 直线电动机的初级三相绕组通入三相交流电后,就会在气隙中产生一个沿直线移动的正弦波磁场,其移动方向由三相交流电的相序决定,如图所示。显然该行波磁场的移动速度与普通电机旋转磁场在定子内圆表面的线速度相等。 行波磁场切割次级上的导体后,在导体中感应出电动势和电流,该电流与气隙磁场作用,在次级中产生电磁力,驱动次级沿着行波磁场移动的方向作直线运行,或者利用反作用力驱动初级朝相反的方向运动。如果改变直线电动机初级绕组的通电相序,即可改变电动机的运行方向。因此直线电动机可实现往返直线运动。 3.直线电机的特点 直线电机是一种将电能直接转换成直线运动机械能而不需通过中问任何转换装置的新颖电机,它具有系统结构简单、磨损少、噪声低、组合性强、维护方便等优点。旋转电机所具有的品种,直线电机几乎都有相对应的品种,其应用范围正在不断扩大,并在一些它所能独特发挥作用的地方取得了令人满意的效果。 直线感应电动机的特点是:结构简单,维护方便;散热条件好,额定值高;适宜于高速运行;能承担特殊任务,如液态金属的运输、加工等。其缺点是气隙大,功率因数低,力能指标差,低速运行时需采用低频电源,使控制装置复杂。 4.直线电机的应用
原机XZ轴直线电机型号分别为: X轴:E43H4Q-05-193 厂家海顿科技 Z轴:43F4J-05-072 厂家海顿科技 规格: X轴:外部驱动式电机43000系列 1.8°固定轴式双极性(4 线) 每步移动0.00096英寸 5 VDC 出轴长度:290mm(256mm)。配丝母。 Z轴:43000系列 1.8°贯通轴式双极性(4 线) 每步移动0.00048英寸 5 VDC 出轴长度:88mm。带轴台。 电机安装孔位:31.04*31.04mm M3 台阶轴为Φ22 混合式直线步进电机编号规则 E 前缀 (只有用到时) E = 外部驱动式电机 P = 加近零传感器 S = 加原点位置 T = 高温电机 43 指定的系列数字 21 = 21000 28 = 28000 35 = 35000 43 = 43000 57 = 57000 87 = 87000 H 步距角代码 F = 1.8°贯通轴式 H = 1.8°固定轴式 H = 1.8°固定轴式(用"E" 表示"外部驱动式") J = 0.9°贯通轴式 K = 0.9°固定轴式 K = 0.9°固定轴式(用"E" 表示"外部驱动式") L = 1.8°双叠厚,贯通轴式 M = 1.8°双叠厚,固定轴式 M = 1.8°双叠厚(用"E" 表示"外部驱动式") 4 极性 4 = 双极性(4 线) 6 = 极性(6 线) N 步长编码 例如: N = 每步移动0.00012英寸 Q = 每步移动0.00096英寸 J = 每步移动0.00048英寸 05 电压例如: 05 = 5 VDC 12 = 12 VDC 客户可定制电压
云平台建设方案简介 2015年11月
目录
云平台总体设计 总体设计方案 设计原则 ?先进性 云中心的建设采用业界主流的云计算理念,广泛采用虚拟化、分布式存储、分布式计算等先进技术与应用模式,并与银行具体业务相结合,确保先进技术与模式应用的有效与适用。 ?可扩展性 云中心的计算、存储、网络等基础资源需要根据业务应用工作负荷的需求进行伸缩。在系统进行容量扩展时,只需增加相应数量的硬件设备,并在其上部署、配置相应的资源调度管理软件和业务应用软件,即可实现系统扩展。 ?成熟性 云中心建设,要考虑采用成熟各种技术手段,实现各种功能,保证云计算中心的良好运行,满足业务需要。 ?开放性与兼容性 云平台采用开放性架构体系,能够兼容业界通用的设备及主流的操作系统、虚拟化软件、应用程序,从而使得云平台大大降低开发、运营、维护等成本。 ?可靠性 云平台需提供可靠的计算、存储、网络等资源。系统需要在硬件、网络、软件等方面考虑适当冗余,避免单点故障,保证云平台的可靠运行。 ?安全性 云平台根据业务需求与多个网络分别连接,必须防范网络入侵攻击、病毒感染;同时,云平台资源共享给不同的系统使用,必须保证它们之间不会发生数据泄漏。因此,云平台应该在各个层面进行完善的安全防护,确保信息的安全和私密性。 ?多业务性 云平台在最初的规划设计中,充分考虑了需要支撑多用户、多业务的特征,保证基础资源在不同的应用和用户间根据需求自动动态调度的同时,使得不同的业务能够彼此隔离,保证多种业务的同时良好运行。 ?自主可控 云平台建设在产品选型中,优先选择自主可控的软硬件产品,一方面保证整个云计算中心的安全,另一方面也能够促进本地信息化产业链的发展。 支撑平台技术架构设计 图支撑平台技术架构 支撑平台总体技术架构设计如上,整个架构从下往上包括云计算基础设施层、云计算平台资源层、云计算业务数据层、云计算管理层和云计算服务层。其中: ?云计算基础设施层:主要包括云计算中心的物理机房环境; ?云计算平台资源层:在云计算中心安全的物理环境基础上,采用虚拟化、分布 式存储等云计算技术,实现服务器、网络、存储的虚拟化,构建计算资源池、 存储资源池和网络资源池,实现基础设施即服务。
直线电机的结构及工作原理 来源:本站整理作者:佚名2010年02月25日 17:43 分享 订阅 [导读]直线电机的结构直线电机的结构可以看作是将一台旋转电机沿径向剖开,并将电机的圆周展开成直线而形成的。其中定子相 关键词:直线电机 直线电机的结构 直线电机的结构可以看作是将一台旋转电机沿径向剖开,并将电机的圆周展开成直线而形成的。其中定子相当于直线电机的初级,转子相当于直线电机的次级,当初级通入电流后,在初次级之间的气隙中产生行波磁场,在行波磁场与次级永磁体的作用下产生驱动力,从而实现运动部件的直线运动。 直线电机的工作原理 设想把一台旋转运动的感应电动机沿着半径的方向剖开,并且展平,这就成了一台直线感应图电动机。 初级做得很长,延伸到运动所需要达到的位置,也可以把次级做得很长;既可以初级固定、次级移动,也可以次级固定、初级移动. 通入交流电后在定子中产生的磁通,根据楞次定律,在动体的金属板上感应出涡流。设引起涡流的感应电压为E,金属板上有电感L和电阻R,涡流电流和磁通密度将按费来明法则产生连续的推力F。 直线电机的特点 高速响应由于系统中直接取消了一些响应时间常数较大的如丝杠等机械传动件,使整个闭环控制系统动态响应性能大大提高,反应异常灵敏快捷。 位精度高线驱动系统取消了由于丝杠等机械机构引起的传动误差减少了插补时因传动系统滞后带来跟踪误差。通过直线位置检测反馈控制,即可大大提高机床的定位精度。传动环节的弹性变形、摩擦磨损和反向间隙造成的运动滞后现象,同时提高了其传动刚度。 速度快、加减速过程短 行程长度不受限制在导轨上通过串联直线电机,就可以无限延长其行程长度。 动安静、噪音低由于取消了传动丝杠等部件的机械摩擦,且导轨又可采用滚动导轨或磁垫悬浮导轨(无机械接触),其运动时噪音将大大降低。 效率高由于无中间传动环节,消除了机械摩擦时的能量损耗。 直线电机的应用 直线电机主要应用于三个方面: 应用于自动控制系统,这类应用场合比较多; 作为长期连续运行的驱动电机; 应用在需要短时间、短距离内提供巨大的直线运动能的装置中。 U槽无刷直线电机可以直接驱动,无需将转动转为线性运动,机械结构简单可靠。电机运行超平稳,无齿槽效应,动态响应速度极快,惯量小,加速度可达20G,速度达到10-30m/s,低速1μm/s时运动平滑,刚性高,结构紧凑,可选配直线编码器做高精度位置控制,其位置精度取决于所选编码器。
(10)授权公告号 CN 101630891 B (45)授权公告日 2011.08.17C N 101630891 B *CN101630891B* (21)申请号 200810012338.3 (22)申请日 2008.07.16 H02K 33/18(2006.01) H02K 1/34(2006.01) G05B 19/04(2006.01) (73)专利权人中国科学院沈阳自动化研究所 地址110016 辽宁省沈阳市东陵区南塔街 114号 (72)发明人苏刚 李洪谊 (74)专利代理机构沈阳科苑专利商标代理有限 公司 21002 代理人许宗富 周秀梅 US 6779982 B2,2004.08.24, CN 87200807 U,1987.11.04,CN 101051786 A,2007.10.10, CN 86204843 U,1986.12.24,(54)发明名称 一种微型直线电机及其驱动方式 (57)摘要 一种微型直线电机及其驱动方式,属于直线 电机技术领域。该电机结构包括端盖、内部铁心、 外部磁轭、线圈、线圈支架及两个磁钢,两磁钢同 极相对置于内部铁心两端,两磁钢外端分别安装 有端盖,在两端盖内,磁钢与内部铁心的外周置有 两对称的弧形磁轭,两弧型磁轭在内部铁心外周 大致成圆环型,在两弧形磁轭间形成滑道,磁轭与 内部铁心及磁轭与磁钢之间形成气隙,线圈置于 内部铁心与磁轭之间,线圈上固定有线圈支架,线 圈支架两端通过滑道穿出磁轭,线圈及线圈支架 可在磁轭间的滑道上滑动。本发明两磁钢同极相 对放置,磁路的封闭性比较好,在气隙中形成比较 均匀的磁场。本发明结构简单,适合作为微小型机 构的驱动器。 (51)Int.Cl.(56)对比文件 审查员 肖继军 (19)中华人民共和国国家知识产权局(12)发明专利 权利要求书 1 页 说明书 4 页 附图 5 页
基于MATLAB的直线电机PID控制器设计 摘要 随着现代工业的飞快发展,控制对象日益复杂,对其的性能控制要求也不断提高,致使人们寻找更好的控制方法,其中以改进PID控制最为典型。PID控制器具有结构简单、容易实现、控制效果好、鲁棒性强等特点,是目前最稳定的控制方法之一。它所涉及的参数物理意义明确,理论分析体系完整,并为工程界所熟悉,因而在工业过程控制中得到了广泛应用。 直线电机是近年来国内外积极研究发展的新型电机之一,凭借自身的特性在以直线运动的工业控制中,有比旋转电机巨大的优越性。可广泛应用于交通运输、起重搬运、物流传输装置、国防及煤矿运输、车床进给等方面,发展前景十分广阔。 传统的比例积分微分( PID) 控制器参数往往因整定不良、性能欠佳,对运行状况的适应性很差。简单的控制又不能很好地适应对象系统特性变化时的最佳控制要求。因此,鉴于控制方法目前仍有广泛应用,对参数整定方法的研究将具有很好的应用价值。本文根据稳定边界法则及Ziegler-Nichol算法,以直线电机控制模型为例介绍如何在MATLAB 工具帮助下整定并验证PID 控制器参数,使参数的整定变得简单、易行,使整定效果更优化。 关键词:直线电机PID控制 MATLAB 控制系统参数整定系统仿真
Abstract: With the fast development of modern industry, more complicated control object, its performance control requirements improve continuously, cause people looking for better control method, which to improve PID control is the most typical example. The PID (Proportional-Integral-Derivative) control is one of the most common control methods at present. Its structure is simple and easy to implement, however, the control effect is perfect and it has a strong robust characteristics. The physical parameters is, meaning of ,theoretical analysis of system is integrity, and it is familiar by the engineering sector, which in the industrial process control has been widely used. Linear motor is one of the studied new motor. Because of its peculiarity, the linear motor performed better than rotary motor in the control systems when the moving route is linear. Its application range extends widely and widely. And it has been applied in many fields. However, the traditional parameter adaptability of proportion-integral-differential (PID) controller to the operating situation is very bad sometimes because the reduction and performance isn't good. Simple control and can't well adapt to changes in the system characteristics of the object of optimal control requirements. Therefore, in view of the control method is currently there are still widely used, to the study of the method of parameter setting will have a good application value. According to the stable boundary principle and Ziegler-Nichol algorithm, this paper introduces how to reduce and validate the PID controller parameter with the help of MATLAB tool taking the linear motor control model as an example. Making the parameters set becomes simple, easy to operate, and make the setting effect more optimization. Key words:Linear motor,PID control, Matlab, Control system, Parameters setting, System simulation
1.云计算参考架构 在私有云当中,主要包含以下几个组件:物理基础架构、虚拟化层、服务自动化层、服务门户、安全体系、云API和可集成的其它功能。(如图私有云参考架构) 图3.4 私有云参考架构 a) 物理基础架构 物理架构的定义是组成私有云的各种计算资源,包括存储、计算服务器、网络,无论是云还是传统的数据中心,都必须基于一定的物理架构才能运行。 在私有云参考架构中的物理基础架构其表现形式应当是以资源池模式出现,也就是说,所有的物理基础架构应当是统一被管,且任一设备可以看成是无状态,或者说并不与其它的资源,或者是上层应用存在紧耦合关系,可以被私有云根据最终用户的需求,和预先定制好的策略,对其进行改变。 b) 虚拟化层 虚拟化是实现私有云的前提条件,通过虚拟化的方式,可以让计算资源运行超过以前更
多的负载,提升资源利用率。虚拟化让应用和物理设备之间采用松耦合部署,物理资源状态的变更不影响到虚拟化的逻辑计算资源。且可以根据物力基础资源变化而动态调整,提升整体的灵活性。 c) 服务自动化层 服务自动化层实现了对计算资源操作的自动化处理。它可以集中的监控目前整体计算资源的状态,比如性能、可用性、故障、事件汇总等等,并通过预先定义的自动化工作流进行相关的处理。 服务自动化层是计算资源与云计算服务门户相关联的重要部件,服务自动化层拥有自动化配置和部署功能,可以进行服务模板的制定,并将服务内容和选择方式在云计算服务门户上注册,用户可以通过服务门户上的服务目录来选择相应的计算资源请求,由服务自动化层实现服务交付。 d) 云API 云应用开发接口提供了一组方法,让云服务门户和不同的服务自动化层进行联系,通过云API,可以在一个私有云当中接入多个不同地方的计算资源池,包括不同架构的计算资源,并通过各自的服务自动化体系去进行服务交互。 e) 云服务门户 云服务门户是用户使用私有云计算资源的接口,云服务门户上提供了所有可用服务的目录,并提供了完善的服务申请流程,用户可以执行申请、变更、退回等计算资源使用服务。 云服务门户收到最终用户的请求时,将根据预先定义好的策略对该请求进行立刻供应、预留或者排队。 不同的用户通过同一个云服务门户当中,将会看到只属于自己的应用、计算资源和服务目录,这是云计算当中的多租户技术,用户使用的资源在后台集中,但是在前端是完全的逻