
其余的比较简单,大家可以自己考虑。
3. 坐标系}B {的位置变化如下:初始时,坐标系}A {与}B {重合,让坐标系}B {绕
B Z 轴旋转θ角;然后再绕B X 旋转φ角。给出把对矢量P B 的描述变为对P A
描述
的旋转矩阵。
解:Θ坐标系}B {相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变
换顺序为依次右乘。
∴对P A 描述有 P T P B
A B A = ;
其中 ),(),(φθx Rot z Rot T A
B = 。
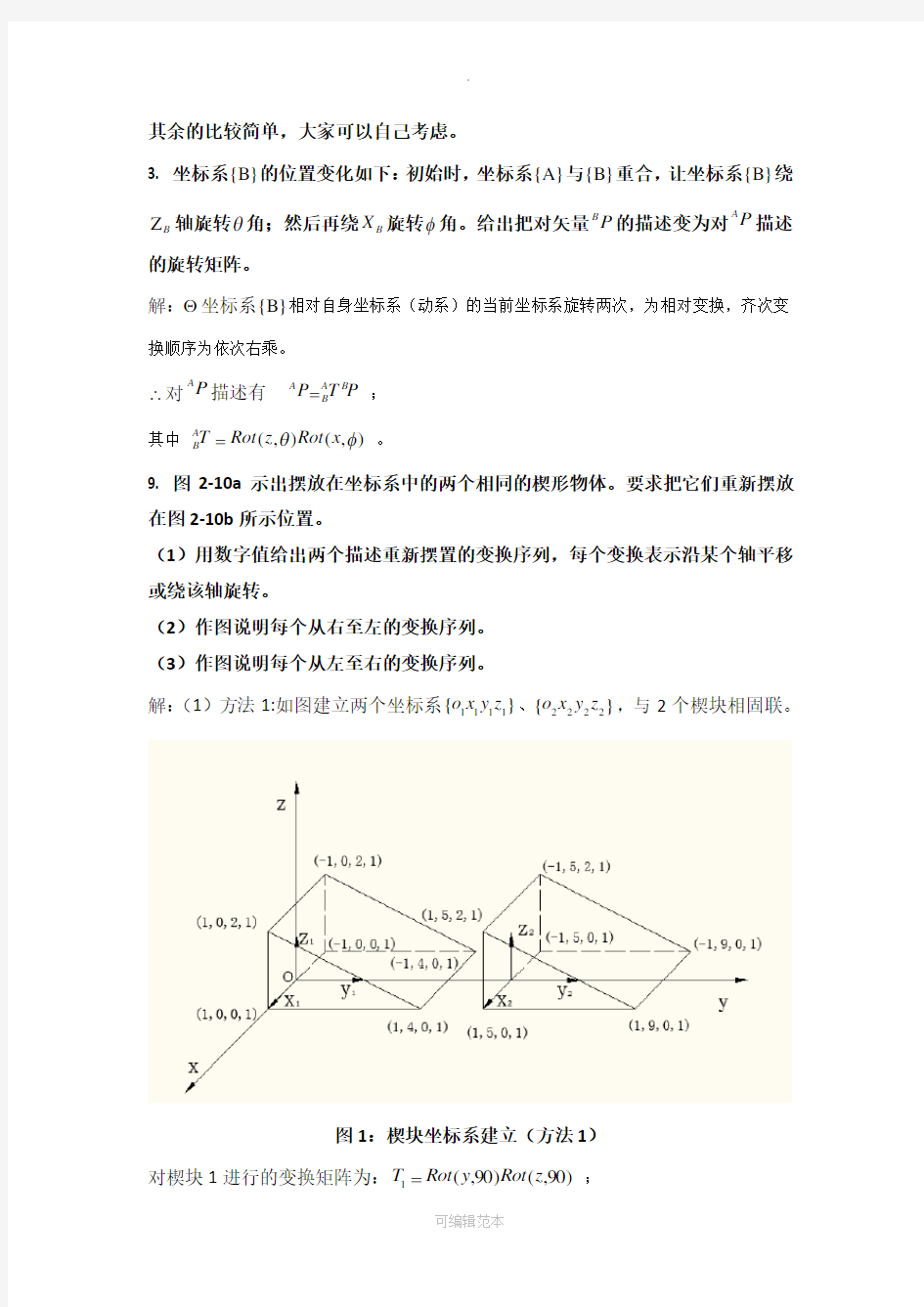
9. 图2-10a 示出摆放在坐标系中的两个相同的楔形物体。要求把它们重新摆放在图2-10b 所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。 (3)作图说明每个从左至右的变换序列。
解:(1)方法1:如图建立两个坐标系}{1111z y x o 、}{2222z y x o ,与2个楔块相固联。
图1:楔块坐标系建立(方法1)
对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ;
对楔块2进行的变换矩阵为:
)180,()90,()90,()4,0,3(o
o 02o 2z Rot x TRot z Rot Trans T --= ;
其中 ?
?
???
????
???=10000100501000010
2T ; 所以 :??
???????
???=1000
00100001
01001T ;?????
?
?
??
???--=10
004010000121
002T 对楔块2的变换步骤:
① 绕自身坐标系X 轴旋转?90; ② 绕新形成的坐标系的Z 轴旋转?180; ③ 绕定系的Z 轴旋转?-90; ④ 沿定系的各轴平移)4,0,3(-。
方法2:如图建立两个坐标系}{1111z y x o 、}{2222z y x o 与参考坐标系重合,两坐标系与2个楔块相固联。
图1:楔块坐标系建立(方法2)
对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ; 对楔块2进行的变换矩阵为:
)90,()180,()90,()0,0,4()9,0,2(o o o 2--=z Rot x Rot y Rot Trans Trans T ;
所以 :??
???????
???=100000100001
01001T ;?????
?
?
??
???--=10009010000121
002T 。 备注:当建立的相对坐标系位置不同时,到达理想位置的变换矩阵不同。 (2)、(3)略。
2. 图3-11 给出一个3自由度机械手的机构。轴1和轴2垂直。试求其运动方程式。
解:方法1建模:
如图3建立各连杆的坐标系。
图3:机械手的坐标系建立
根据所建坐标系得到机械手的连杆参数,见表1。
表1:机械手的连杆参数
连杆
i α
i a i d i θ
1
o 90
1L
1θ
2 0
2L
2θ 3 0 0 0
3θ
该3自由度机械手的变换矩阵: 32130A A A T = ;
?
?
??????????-=1000001000
111
1
111
11θθθθθθs L c s c L s c A ; ?
?
???
???????-=100
0100002222222
2
2θθθθθθs L c s c L s c A ; ??
???
???????-=1000
010000003
3
3
33θθθθc s s c A ; ?
??
????
????
?+-++----+---=10
002
23
23232322121113
213213213
212121113213213
2132130
θθθθθθθθθθθθθθθθθθθθ
θθθθθθθθθθθθθθθθθθθθθs L c c s s s c c s c s L s L c c s s s c s s s s c c s c c L c L s c s c s c c s s c c c c T
方法二进行建模:
坐标系的建立如图4所示。
图4:机械手的坐标系建立
根据所建坐标系得到机械手的连杆参数,见表2。
表2:机械手的连杆参数
??
??????????-=10000100000011
111θθθθc s s c A ; ??
?????
?????--=100
00001000
22122
2θθθθc s L s c A ; ??
???
???????-=100
010000033
2333θθθθc s L s c A ; ?
????
??
????
?+-++----+---=10
002
23
23232322121113
213213213
21212111
32132132132130
θθθθθθθθθθθθθθθθθθθθ
θθθθθθθθθθθθθθθθθθθθθs L c c s s s c c s c s L s L c c s s s c s s s s c c s c c L c L s c s c s c c s s c c c c T
3. 图3-12 所示3 自由度机械手,其关节1与关节2相交,而关节2与关节3平行。图中所示关节均处于零位。各关节转角的正向均由箭头示出。指定本机械手各连杆的坐标系,然后求各变换矩阵10T ,21T 和32T 。
解:对于末端执行器而言,因为单独指定了末端执行器的坐标系,则要确定末端执行器与最后一个坐标系之间的变换关系。 方法1建模:
按照方法1进行各连杆的坐标系建立,建立方法见图5。
图5:机械手的坐标系建立
连杆3的坐标系与末端执行器的坐标系相重合。机械手的D-H 参数值见表3。
表3:机械手的连杆参数
连杆
i α
i a i d i θ
1 o 90
21L L + 1θ 2
0 3L
2θ 3
0 4L
0 3θ
末端执行器
4θ
注:关节变量 04321====θθθθ 。
将表3中的参数带入得到各变换矩阵分别为:
??
???????
???+-=1000010010000
12110
L L T ;?
?
????
?
?????=100001000010001
321L T ; ??
???????
???=100001000010001432
L T ; ?
?
???
??
?????=1000
010*********
3末
T
方法2建模:
按照方法2进行各连杆的坐标系建立,建立方法见图6。
图6:机械手的坐标系建立
3自由度机械手的D-H 参数值见表4。
表4:机械手的连杆参数
连杆
1-i α 1-i a i d i θ
1 0
0 21L L + 1θ 2
o 90
2θ 3
0 3L
0 3θ
末端执行器
4L 0
4θ
注:关节变量 04321====θθθθ 。
将表4中的参数带入得到各变换矩阵分别为:
??
???????
???+=100010000100
0012110
L L T ; ?
?
???
?
?
?????-=1000
0010010000
01
21T ;
??
???????
???=100001000010001332
L T ; ??
???
?
?
?????=10000100001000
143L T 末
1. 已知坐标系}C {对基座标系的变换为:?
?
???
????
???=100000013100
4010C ;对于基座标系的微分平移分量分别为沿X 轴移动0.5,沿Y 轴移动0,沿Z 轴移动1;微分旋转分量分别为0.1,0.2和0。
(1) 求相应的微分变换;
(2) 求对应于坐标系}C {的等效微分平移与旋转。 解:(1)对基座标系的微分平移:T d ]1,0,5.0[=;
对基座标系的微分旋转: T ]0,2.0,1.0[=δ;
?
????????
???--=?0000
101.02.001.0005.02.000
; 相应的微分变换:?????
???????--=?=00005.01.02.000001.05.0002
.0c dc (2)由相对变换C 可知n 、o 、a 、p ,
5.0))((=+??=d p n d x c
δ;5.0))((=+??=d p o d y c δ;0))((=+??=d p a d z c δ
0=?=δδn x c
;1.0=?=δδo y c ;2.0=?=δδa z c
对应于坐标系}{C 的等效微分平移:]0;5.0;5.0[=d c ;微分旋转:]2.0;1.0;0[=δc 。 2. 试求图3.11所示的三自由度机械手的雅可比矩阵,所用坐标系位于夹手末端上,其姿态与第三关节的姿态一样。 解:设第3个连杆长度为3L 。
1)使用方法1建模,末端执行器的坐标系与连杆3的坐标系重合,使用微分变换法。
图7:机械手的坐标系建立
表5:D-H 参数表
连杆
i α
i a i d i θ
1 o 90
1L 0 1θ 2
2L
2θ 3 0 0
3θ
?
?
?????
????
?+++-+=100001000)
()(0)()(223232
22323231
θθθθθθθθθθs L c s c L s c T ;??
???
???????-=100
010********
3
32θθθθc s s c T ; E T =33; 由上式求得雅可比矩阵:
???
???
???
?
?????
?????=110
0000000000000323
2θθc L s L J T
;
2)使用方法2建模,使用微分变换法。
图8:机械手的坐标系建立
表6:D-H 参数表
连杆
1-i α 1-i a i d i θ
1 0
0 0 1θ 2
o 90
1L
2θ 3 0
2L
3θ
?????????
???++-++-+=10000)()(01000)()(223232221323231θθθθθθθθθθs L c s c L L s c T ;?
?
???
??
?????-=1000
010*********
32θθθθc s L s c T ;E T =33
;
由上式求得雅可比矩阵:
????????????
???
??
??
?
++--=11
000)(00)(00000032322
213
232θθθθθθθc s c L L c L s L J T
;