国内机器人技术研究现状分析
王守龙
摘
要:随着经济全球化对工农业生产提出越来越高的要求,计算机
技术向着智能化发展,机器人越来越普遍的被工农业应用,其在提高工农业产品质量,增加经济效益方面发挥着重大作用。本文又介绍分析了移动机器人和小口径管内机器人及其在我国的技术研究现状。中国的机器人事业面临着新的机遇和挑战。
关键词:机器人;技术研究;移动机器人;小口径管内机器人
、尸■、■
前言
有人认为, 应用机器人只是为了节省劳动力, 而我国劳动力资源丰富, 发展机器人不一定符合我国国情。这是一种误解。在我国, 会主义制度的优越性决定了机器人能够充分发挥其长处。它不仅能为我国的经济建设带来高度的生产力和巨大的经济效益, 而且将为我国的宇宙开发、海洋开发、核能利用等新兴领域的发展做出卓越的贡献。
1工农业机器人
1.1工业机器人研究现状分析
机器人产业是近30年发展起来的新型产业。我国政府早在“七?五”期间就开始组织了对工业机器人的攻关, 到了1987年,国家高技术研究开发计划就把智能机器人作为七大重点领域之一进行集中研究。经过十几年的艰苦奋斗,我国在水下、空间、核领域等特殊机器人方面取得了令人欣慰的成果,一批机器人产品和机器人应用工程应运而生。到20世纪90年代末,我国共完成了100多项工业机器人应用工程,建成了20个机器人产业化基地,从事机器人研究、开发和应用工程单位200多家,专业从事机器人产业开发的50家左右,全国工业机器人用户近800家,拥有工业机器人约4000台。2006年发布的《国家中长期科学和技术发展规划纲要》前沿技术中,我国将智能服务机器人列为重点方向,提出加大科技投入与科技基础条件平台建设。然而,由于主要依靠科技部门研究开发计划的支持,从资金到产业的支持力度不够,在机器人关键技术方面,我国与国外的差距并没有明显缩小,在关键部件、产品产业化以及基础研究方面的差距还在拉大。到1998年,863计划推动的几个机器人产业化基地产值仅仅1亿元。然而,国外各大机器人公司认识到高速发展中的中国机器人市场的巨大潜力,凭借其技术和资金的优势纷纷进入了中国市场。可以说,目前的中国机器人市场仍然是外国企业一统天下,我国机器人发展尚未进入规模开发利用和产业化的阶段。
我国经过几十年来的研究与引进, 在机器人运动学仿真、动力学仿真和某些典型工业机器人机构分析软件方面取得了一些成果,但总的看来, 我国机器人机械技术的研究状况与国外相比还有较大的差距, 目前既没有建立一种多功能的机器人系统, 也缺乏利用技术对机器人机械学的很多专门问题进行深人研究。我国目前研制的几种工业机器人机型结构主要是直接仿制日本90年代初的样机, 一些主要关键元器件依赖国外进口。虽然国家“七五” 期间安排了一些单项研究课题, 但这些课题一时还难于直接用于国产工业机器人, 还远不能从理论及实际技术上建立起我国机器人的完整设计体系, 这与国外相比差距较大。国内利用国产机器人开展应用工程的研究工作刚刚起步。我国对移动机器人研究, 近年来在步行机基础理论方面的成果较多, 而步行机实物模型或样机较少,与国外先进水平相比也存在较大的差距。
1.1农业机器人技术研究进展农业机器人技术是当今国际农业机械化研究的前沿领域,其迅速发展的主要动力有三点:一是社会的进步要求农业作业更精确、更快速、更省力、更舒适;二是人类已经快速进入老龄进入老龄化社会,一些繁重、单调的农业生产需要机械化、自动化、智能化的机器来替代;三是计算机、微电子、传感器以及GPS卫星定位技术的发展,给农业机器人技术和智能化农业生产装备的发展提供了
前所未有的可能。因此,农业机器人技术在一些发达国家取得了较大发展。
近年来,我国农业机械化和工厂化农业取得了长足发展,特别是作业量多、劳动量大、作业精细、操作单调、但生产收益相对较高的农作业发展迅速,这给农业机器
人的发展提供了巨大的市场需求。农业机器人以及智能化农业装备以作业的高效率、
高精度,低强度、低能耗、环境友好为特点,展示了广阔的应用前景。
目前,国内农业机器人主要有果蔬采摘机器人、蔬菜嫁接机器人、果蔬分选机器人和农田作业机器人。我国在自动化果蔬采摘技术领域的研究还处于起步阶段。中国农业大学张铁中等人在草莓、黄瓜、西红柿、茄子等果蔬果实采摘机器人方面做了较深入地研究,并研制出了实验样机;在草莓果实目标识别、果实重心提取、果柄位置确定、采摘机器人及手抓等方面的研究取得了一定成果,初步建立了草莓采摘机器人实验系统,采用双目视觉等图像处理技术实现了草莓的识别和定位,对草莓果实的互相重叠或遮挡等情况进行了研究,并取得了一些研究成果。但果蔬采摘机器人还存在一些问题,主要是果实的识别率和采摘率不高、果实的平均采摘时间较长和机器人的制造成本较高。我国自1993 年中国农业大学张铁中教授开始蔬菜自动化嫁接技术研究以来,在多个领域取得了较大成就,部分样机已投入生产,已具备比较成熟的自动化嫁接技术和装备,下一步需要尽快产业化,以满足广大育苗农户的需求。对于果蔬分选机器人最新研究现状,陈英等人于2018 年设计了一套基于计算机视觉的葡萄检测分级系统,与人工分级对比,其颜色和大小形状分级的准确率分别90%和88.3%,同时在分级过程中不会对葡萄造成损伤。但国内的研究主要集中在实验研究
阶段,研究的内容以图像处理和系统的控制实现为主,研究的对象主要为苹果为主的
球形水果,对蔬菜以及其他形状的水果研究的较少,产品主要集中在实验样机上,还
没有投入市场的商用智能化分选机器人。农田作业生产的现代化,经历了机械化、自
动化、无人化等几个发展阶段,现正处于自动化向无人化过渡的阶段。农田作业机器
人的研究归根结底是导航方式的研究。根据国内研究历史和现状,农田作业机器人有
效的导航方式,大致可以归为 3 类:DESM(detecting established signal methods>, 通过接收固定位置发出的信号
来确定行走方向和自我定位;GPSM(global position system methods>, 由GPS 其他传感方式进行导航和自我定位;DNEM(detecting natural environment methods〉,通过认识周围环境来确定自己的行走方向、自我定位和监测障碍物,一般以视觉传感为主。
我国农业机器人的发展需紧紧围绕农业生产实际,选准对象、瞄准关键,以作业量多、劳动量大、操作精细、生产收益高的农业作业为切入点,把先进性、实用性和
经济性紧密结合,研制出顶用、好用、耐用的机器,才能有所突破和作为。要使农业
机器人真正在农业上发挥作用,必须提高农业机器人的环境适应性、提高工作效率和
降低成本。
2 移动机器人
2.1 国内移动机器人研究简况 移动机器人研究是机器人学中的一个重要分支。移动机器人避障与路径规划又 是机器人研究的一个重要方向。目前,随着机器人技术的不断进步,机器人学 科越来越具有强大的生命力,它在某种程度上已经代表当今信息技术、自动化 技术、系统集成等技术的最新发展。
国内在移动机器人的研究起步较晚,大多数研究尚处于某个单项研究阶段,主 要的研究工作有 : 清华大学智能移动机器人于 1994年通过鉴定。香港城市大学智 能设计、自动化及制造研究中心的自动导航车和服务机器人。中国科学院沈阳 自动化研究所的AG 和防爆机器人。中国科学院自动化所自行设计、制造的全方 位移动式机器人视觉导航系统。清华大学于 2003年7月研制成功的THMR-智能车 等。
2.2 移动机器人主要研究的方向
2.2.1 导航和定位 导航和定位是移动机器人研究的两个重要问题。移动机器人的导航方式可分为 川: 基于境信息的地图模型匹配导航。基于各种导航信号的陆标导航、基于视觉 导航和味觉导航等。环境地图模型匹配导航是机器人通过自身的各种传感器, 探测周围环境,利用感知到的局部环境信息进行局部地图构造,并与其内部事 先存储的完整地图进行匹配。
2.2.2 路径规划 路径规划技术是机器人研究领域中的一个重要分支。所谓机器人的最优路径规 划问题,就是依据某个或某些优化准则 ( 如工作代价最小、行走路线最短、行走 时间最短、行走能量消耗最低等 >,在其工作空间中找到一条从起始状态到目标 状态的能避开障碍物的最优路径。机 器人视 觉机器视觉系统吸引了众多研究 人员的注意,经过多年的努力,机器人视觉系统正在广泛地应用于 视觉检测、 机器人的视觉引导和自动化装配领域中。
2.2.3 多传感器信息融合 单一传感器只能获得环境特征的部分信息段,为了完整、准确地反映环境特 征,在智能移动机器人导航系统中往往装有多种传感器,它们提供的信息有些 是互补的,有些是冗余的,必须以一定的方法融合这些互补或冗余的传感器信 息,以充分利用多传感器提供的信息,才能获得最佳的、可靠的信息,从而更 准确,更全面地反映外界环境的特征,为导航决策提供正确的依据。
2.2.4 多移动机器人协调
多机器人系统的研究始于 20世纪70年代,随着机器人应用领域的不断拓展、机 器人工作环境复杂度、任务的加重,对机器人的要求不再局限于单个机器人, 多机器人的研究己经成为机器人学研究的一个热点。多机器人系统的研究分为 多机器人合作 (Multi-robotC oordination> 和多机器人协调 (Multi-robotCo operation> 两大类。 3 小口径管内机器人
3.1 小口径管内机器人的概念 小口径管内机器人主要指适用管道直径小于 道内部进行无损检测或维修的移动平台 , 数可减小因管道泄漏所带来的环境污染与经
济损失。
小口径管内机器人的研究机构在国内则主要有上海大学、上海交通大学、哈尔 滨工业大学、中国科学技术大学、广州工业大学与国防科学技术大学等。从小 口径管内机器人的特殊应用场合出发,针对无流体管道工作环境,将小口径管 内机人按运动方式概括为轮式、蠕动式与振动式三种类型。
3.2轮式小口径管内机器人
80m m 可携带相关仪器设备进入管
通过及时获得管道内壁的实时状态参
轮式小口径管内机器人的基本工作原理为:驱动轮依靠重力、弹簧力、磁
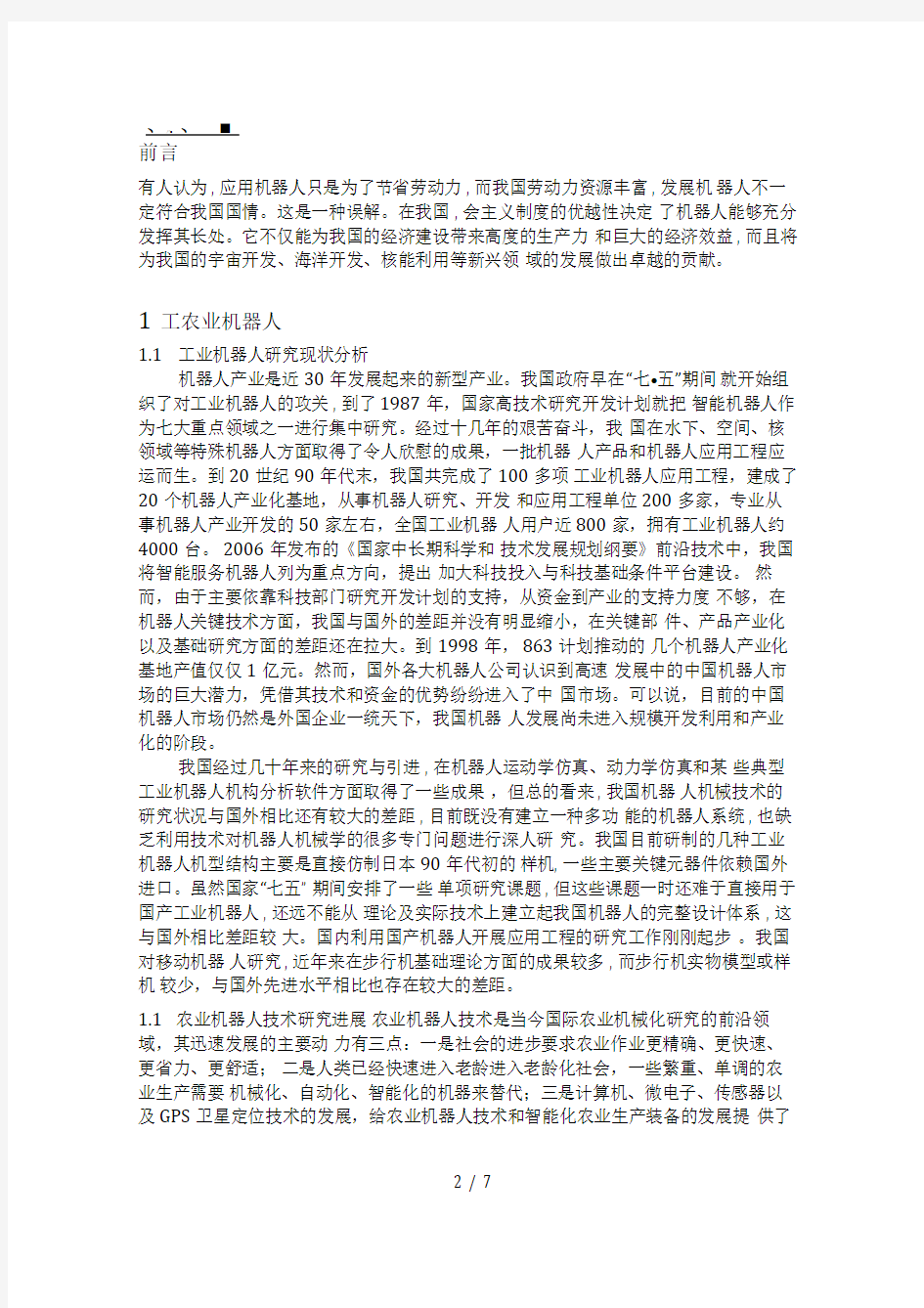
性力等压紧在管道内壁上以支承机器人本体并产生一定的正压力,由驱动轮与管壁之间的摩擦力产生机器人前后行走的驱动力,以实现机器人的移动[3] o 轮式管内机器人在目前实际工程中应用最多,分为直进式与螺旋式,前者驱动轮与行进方向平行,后者驱动轮与行进方向成一定角度,基于螺旋传动思想,由倾斜安装的摩擦轮与管壁之间的摩擦推力产生运动,如图1所示.
车轮管壁电机支撑轮
图1直进轮式
2009年中国科学院沈阳自动化研究所完成了具有自适应能力的管内机器人,在不增加驱电机数量的前提下,机器人的传动机构能够在管道直径改变时,自动改变行走部件的输出形式以克服障碍,完成越障任务。为了提高机器人的管道适应性,苏毅等于2008年提出了一种同轴双牵引轮组螺旋驱动机器人,该机器人可实现跨空行走、弯道引导、逾越障碍等。同时期一种带有检测功能的螺旋式小口径管内机器人在沈阳自动化所研制成功。
3.3蠕动式小口径管内机器人
蠕动式小口径管内机器人的运动是通过模仿蚯蚓、毛毛虫等尺蠼类动物的伸缩运动来实现的,其研究最为引人关注。该类机器人的结构组成为前后各一组支撑机构,中间为伸缩机构,如图2所示。该类机器人主要包括气压式、超越式、惯性冲击式与SM 式等。
1.支撑机构1
2.伸缩机构
3.支撑机构2
图2蠕动式机器人运动原理
3.4发展方向 小口径管内机器人技术的研究按其系统组成可分为四个阶段 :移动机构的设计
与优化,特殊传感器的设计,能源与信号传输的无缆化以及自主控制的实现。 5结论
根据以上分析,我国机器人技术现状是工业机器人目前尚在仿制 ,机器人 应用处在起步阶段,机器人机械学的研究工作取得不少研究成果,其中一些理 论研究成果甚至已达到或超过国际先进水平,但总的说来还不能做到系统、全 面地指导机器人整机设计,一些先进的研究成果一时尚难于直接用于国产样 机。为此近期发展的原则应是加强机器人机械学的实用性理论和基础技术研究 , 使我国在近期内切实掌握第一代工业机器人的研究、设计、生产、维修及其应 用技术,提高关键元器件的国产配套率,提高国产机器人可靠性加强机器人应 用工程的研究特别应重视与鼓励国产机器人应用工程的开发,使机器人技术尽 早为我国社会主义经济建设服务。 加强机器人机械学基础理论研究,强化机器 人机械学与信息学、计算技术等学科的结合 ,跟踪国外机器人高技术和其它有 关学科高技术集中反映的实用目标。
在新世纪,中国人和中国的机器人事业面临着新的机遇和挑战,因此,科研工 作者应坚持“有所为,有所不为”的原则,以市场需求为导向,以技术进步为 驱动,沿着知识创新、技术创新、制度创新、产品创新的创新型道路,为增强 综合国力、实现中华民族伟大复兴努力开拓向前。
参考文献
:
时间 1
2 3
— r
I 1 JL 亠 -|
\—
2 1
Z 状态1
状态2 状态3 1 ------- — 位移
[1]潘丽霞.论工业机器人的发展与应用[J]. 山西:山西科技,2018,25(3>:22-23.
[2]近藤直,门田充司,野口仲. 农业机器人[M]. 乔军,李民赞等译. 北京: 中国农业大学出版社,
2009.5.
[3]苪延年. 机器人技术及其应用[M]. 北京: 化学工业出版社,2008,5.
[4]张永顺,邓总全,贾正元等. 管内轮式移动机器人内驱动控制方式[J]. 中国机械工程,2002,13(18>.
[5]徐国华,谭民.移动机器人的发展现状及其趋势[J]. 机器人技术与应用,2001, (3>:7- 8.
[6]蒋新松. 未来移动机器人将是21世纪技术发展的热点.中国机械工程,2000,12( 11 >: 58-60.
[7]孟伟,洪炳,韩学东一种多机器人协作控制方法. 机器人,2004, 26(1>:58-59.
[8]田海晏, 薛龙, 孙章军. 直进轮式微型管道机器人的行走系统设计[ J] . 北京石油化工学院学报, 2006, 14(2>.