龙源期刊网 https://www.doczj.com/doc/e12102768.html,
减摇鳍装置的工作原理与常见故障分析
作者:王双华
来源:《中国科技博览》2016年第07期
[摘要]本文介绍了减摇鳍装置的工作原理,在此基础上分析了收放式泵控型减摇鳍装置常见故障及解决方法。
[关键词]减摇鳍工作原理故障分析与解决
中图分类号:TM725 文献标识码:A 文章编号:1009-914X(2016)07-0016-02
1 前言
众所周知,船舶在海上航行时,受到风、流、浪的作用,会产生横摇、纵摇、艏摇和横荡、纵荡、垂荡六个自由度的运动。其中,尤以横摇最为剧烈,对船舶航行安全和船上工作人员及设备影响最大。减摇鳍装置就是以减小船舶在波浪海面上航行时的横摇角为目的而装备的一种特种设备,用以提高船舶的适航性,防止船上设备因剧烈摇摆而损坏,改善船员的工作、生活条件,特别为直升机在风浪中从船上起降创造了条件,是减摇效果最好的主动式减摇装置。
减摇鳍按执行机构分为非收放式和收放式两种形式,按控制原理分为阀控型系统和泵控型系统。目前装船的减摇鳍中,非收放式减摇鳍以阀控为主,收放式减摇鳍以泵控为主,本文重点介绍收放式泵控型减摇鳍装置。
2 减摇鳍装置的工作原理
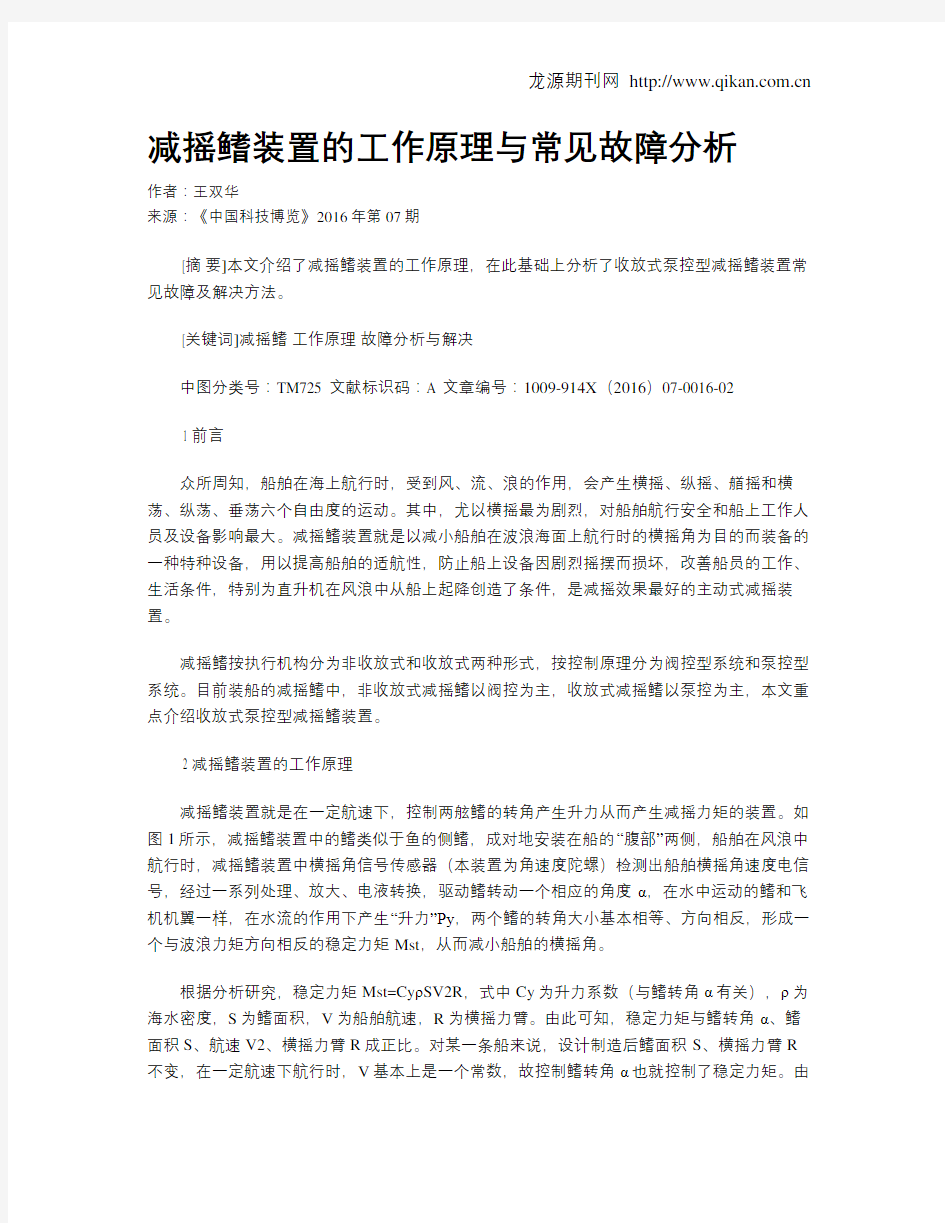
减摇鳍装置就是在一定航速下,控制两舷鳍的转角产生升力从而产生减摇力矩的装置。如图1所示,减摇鳍装置中的鳍类似于鱼的侧鳍,成对地安装在船的“腹部”两侧,船舶在风浪中航行时,减摇鳍装置中横摇角信号传感器(本装置为角速度陀螺)检测出船舶横摇角速度电信号,经过一系列处理、放大、电液转换,驱动鳍转动一个相应的角度α,在水中运动的鳍和飞机机翼一样,在水流的作用下产生“升力”Py,两个鳍的转角大小基本相等、方向相反,形成一个与波浪力矩方向相反的稳定力矩Mst,从而减小船舶的横摇角。
根据分析研究,稳定力矩Mst=CyρSV2R,式中Cy为升力系数(与鳍转角α有关),ρ为海水密度,S为鳍面积,V为船舶航速,R为横摇力臂。由此可知,稳定力矩与鳍转角α、鳍面积S、航速V2、横摇力臂R成正比。对某一条船来说,设计制造后鳍面积S、横摇力臂R
不变,在一定航速下航行时,V基本上是一个常数,故控制鳍转角α也就控制了稳定力矩。由稳定力矩计算可知,减摇鳍减摇效果会受到船舶航速的影响,在低航速下减摇效果大大减小,甚至失去作用,因此也有将航速作控制量参与控制的,
补偿无功功率节电原理 在交流电路中,由电源供给负载率有两种:一种是有功功率,一种是无功功率。 有功功率是保持用电设备正常运行所需的电功率,也就是将电能转换为其他形式能量(机械能、光能、热能)的电功率。比如:5.5千瓦的电动机就是把5.5千瓦的电能转换为机械能,带动水泵抽水或脱粒机脱粒;各种照明设备将电能转换为光能,供人们生活和工作照明。有功功率的符号用P 表示,单位有瓦(W )、千瓦(KW )、兆瓦(MW )。 无功功率比较抽象,它是用于电路内电场与磁场的交换,并用来在电气设备中建立和维持磁场的电功率。它不对外作功,而是转变为其他形式的能量。凡是有电磁线圈的电气设备,要建立磁场,就要消耗无功功率。比如40瓦的日光灯,除需40多瓦有功功率(镇流器也需消耗一部分有功功率)来发光外,还需80乏左右的无功功率供镇流器的线圈建立交变磁场用。由于它不对外做功,才被称之为“无功”。无功功率的符号用Q 表示,单位为乏(Var )或千乏(kVar )。 无功功率决不是无用功率,它的用处很大。电动机的转子磁场就是靠从电源取得无用功率建立的。变压器也同样需要无功功率,才能使变压器的一次线圈产生磁场,在二次线圈感应出电压。因此,没有无功功率,电动机就不会转动,变压器也不能变压,交流接触器不会吸合。为了形象地说明问题,现举一个例子:农村修水利需要挖土方运土,运土时用竹筐装满土,挑走的土好比是有功功率,挑空竹筐就好比是无功功率,竹筐并不是没用,没有竹筐泥土怎么运到堤上呢? 在正常情况下,用电设备不但要从电源取得有功功率,同时还需要从电源取得无功功率。如果电网中的无功功率供不应求,用电设备就没有足够的无功功率来建立正常的电磁场,那么,这些用点设备就不能维持在额定情况下工作,用电设备的端电压就要下降,从而影响用电设备的正常运行。 无功功率对供、用电产生一定的不良影响,主要表现在: (1) 降低发电机有功功率的输出。 (2) 降低输、变压设备的供电能力。 (3) 造成线路电压损失增大和电能损耗的增加。 (4) 造成底功率因数运行和电压下降,使电气设备容量得不到充分发挥。 从发电机和高压电线供给的无功功率,远远满足不了负荷的需要,所以在电网中要设置一些无功补偿装置来补充无功功率,以保证用户对无功功率的需要,这样用电设备才能在额定电压下工作。这就是电网需要装设无功补偿装置的道理。 2、功率因数 电网中的电力负荷如电动机、变压器等,属于既有电阻又有电感的电感性负载。电感性负载的电压和电流的相量间存在着一个相位差,通常用相位角φ的余弦cos φ来表示。Cos φ称为功率因数,又叫力率。功率因数是反映电力用户设备合理使用状况、电能利用程度和用电管理水平的一项重要指标。三相功率因数的计算公式为: P= UI θcos 3 Q=3UIcos θ S=3UI cos θ=P/S
无功补偿及低压补偿装置原理简介 一、一次电路 一次电路的构成如下图所示,包括隔离开关QS、10组熔断器FUI~FUIO、接触器KM1~KMIO、热继电器FRl~F'R10、补偿电容器CI~CIO.另外还有电流互感器TAa、TAh和TAc.避雷器BLI、BL2和BL3。其中熔断器和热继电器用于对电容器进行短路及过电流保护;接触器是对电容器进行手动或自动投入、切除的开关器件;电流互感器获取的电流信号用于测量无功补偿柜补偿电流的大小:避雷器用子吸收电容器投入、切除操作时可能产生的过电压,是一种额定电压为AC220V的低压避雷器。 二、二次控制电路 包括一个物理结构分为7层的转换开关2SA、无功补偿自动控制器(以下简称补偿控制器)等元器件。转换开关2SA用来手动控制投入或切除1~10路补偿电容器,并完成自动控制器电压信号、电流信号的接人或退出。补偿控制器可以根据功率因数的高低或无功功率r与用蠛的大小自动投入或切除电容器,并在系统电压较高时自动切除电容嚣。具体电路见下图。 转换开关2SA有一个操作手柄,出下图可见,该手柄有自动、零位和手动l~lo共12个挡位,每旋转30°即可转换一个挡位。 在每个挡位,会有桐应的转换开关触点接通.2SA共可转换13对触点,分别是(7)、(8)、(9)、(10)等等,一直到下部的(1)、(2)触点。为了标示出转换开关2SA在不同的挡位与各组触点之问的对应关系,与12个挡位相对应的有12条纵向虚线,虚线与每一组触点(略偏下、无形相交的位置,可能标注有圆点或不标注圆点。标注有圆点的,表示转换开关旋转至该档位时,圆点(略偏上)位
置的一组触点是接通的,否则该组触点星开路状态。例如,在触点(7)、(8)略偏下位置,手动1.手动IO挡位时均标注有圆点,表示这10个挡位时触点(7)、(8)均接通。而在手动l挡位,只在触点(7)、(8)和(1)、(2)位置标注有圆点,说明在该挡位这两组触点是接通的。 无功补偿屏如欲进入自动控制投切状态,需给补偿控制器接人进线柜或待补偿电路总进线处A相电流互感器二次的电流信号I^,B桐、C相电压信号,以及接触器线圈吸合所需的工作电源。具体接线见下图中补偿控制器接线端子图。 图中US1、US2端干连接的103、104号线即是B相、C相电压信号(转换开关2SA在自动挡位时,103号线经2SA的(3)、(4)触点、熔断器FU13、X12端子、隔离开关Qs,连接至B桐电源;104号线沿类似线路连接至C相电源);ISI、IS2端子连接的即是进线柜的电流信号(经由转换开关2SA转接).COM端连接的l 号线即是接触器线圈吸合所需的丁作电源(1号线经熔断器FU11、XI1端子、隔离开关Qs,连接至A桐电源)。B相、C桐电压信号及A相电流信号在补偿控制器内部经过微处理器运算判断后,计算出功率因数的高低、无功功率的大小,一方面经过LED显示器显示功率因数值,同时发送电容器投切指令,例如补偿控制器发出投入电容器CI的指令时,其接线端子中的1号端子经内部继电器触点与COM端(1号线.A相电源)连通,该端子经3号线连接至接触器KMI线圈的左端,线圈的右端经热继电器FR1的保护触点接至2号线.即电源零线N。接触器KM1线圈得电后,主触点闭合.将电容器CI投入,实现无功补偿。此同时.KMI的辅助触点闭合,接通指示灯HL1,指示第一路电容器已经投入.如果无功功率数值较大,补偿控制器则控制各路电容器依次投入,直到功率因数补偿到接近于1。每一路电容器投入时的时间间隔是可调的,通常将其调整为几秒至儿十秒之间。补偿控制器遵
第1章绪论 液压技术作为一门新兴应用学科,虽然历史较短,发展的速度却非常惊人。液压设备能传递很大的力或力矩,单位功率重量轻,结构尺寸小,在同等功率下,其重量的尺寸仅为直流电机的10%~20%左右;反应速度快、准、稳;又能在大范围内方便地实现无级变速;易实现功率放大;易进行过载保护;能自动润滑,寿命长,制造成本较低。因此,世界各国均已广泛地应用在锻压机械、工程机械、机床工业、汽车工业、冶金工业、农业机械、船舶交通、铁道车辆和飞机、坦克、导弹、火箭、雷达等国防工业中。 液压传动设备一般由四大元件组成,即动力元件——液压泵;执行元件——液压缸和液压马达;控制元件——各种液压阀;辅助元件——油箱、蓄能器等。 液压阀的功用是控制液压传动系统的油流方向,压力和流量;实现执行元件的设计动作以控制、实施整个液压系统及设备的全部工作功能。 1.1 液压技术的发展历史 液压技术作为一门新兴应用学科,虽然历史较短,发展的速度却非常惊人。液压设备能传递很大的力或力矩,单位功率重量轻,结构尺寸小,在同等功率下,其重量的尺寸仅为直流电机的10%~20%左右;反应速度快、准、稳;又能在大范围内方便地实现无级变速;易实现功率放大;易进行过载保护;能自动润滑,寿命长,制造成本较低。因此,世界各国均已广泛地应用在锻压机械、工程机械、机床工业、汽车工业、冶金工业、农业机械、船舶交通、铁道车辆和飞机、坦克、导弹、火箭、雷达等国防工业中。 液压传动设备一般由四大元件组成,即动力元件——液压泵;执行元件——液压缸和液压马达;控制元件——各种液压阀;辅助元件——油箱、蓄能器等。 液压阀的功用是控制液压传动系统的油流方向,压力和流量;实现执行元件的设计动作以控制、实施整个液压系统及设备的全部工作功能。 1.2 我国液压阀技术的发展概况 我国的液压工业及液压阀的制造,起始于第一个五年计划(1953~1957年),期间,由于机床制造工业发展的迫切需求,50年代初期,上海机床厂、天津液压件厂仿造了苏联的各类低压泵、阀。 随后,以广州机床研究所为主,在引进消化国外中低压元件制造技术的基础上,自行设计了公称压力为2.5MPa和6.3MPa的中低压液压阀系统(简称广州型),并迅速投入大批量生产。
无功功率补偿装置在电子供电系统中所承担的作用是提高电网的功率因数,降低供电变压器及输送线路的损耗,提高供电效率,改善供电环境。所以无功功率补偿装置在电力供电系统中处在一个不可缺少的非常重要的位置。合理的选择补偿装置,可以做到最大限度的减少网络的损耗,使电网质量提高。反之,如选择或使用不当,可能造成供电系统,电压波动,谐波增大等诸多因素。 一、按投切方式分类: 1.延时投切方式 延时投切方式即人们熟称的”静态”补偿方式。这种投切依靠于传统的接触器的动作,当然用于投切电容的接触器专用的,它具有抑制电容的涌流作用,延时投切的目的在于防止接触器过于频繁的动作时,电容器造成损坏,更重要的是防备电容不停的投切导致供电系统振荡,这是很危险的。当电网的负荷呈感性时,如电动机、电焊机等负载,这时电网的电流滞带后电压一个角度,当负荷呈容性时,如过量的补偿装置的控制器,这是电网的电流超前于电压的一个角度,即功率因数超前或滞后是指电流与电压的相位关系。通过补偿装置的控制器检测供电系统的物理量,来决定电容器的投切,这个物理量可以是功率因数或无功电流或无功功率。 下面就功率因数型举例说明。当这个物理量满足要求时,如COSΦ超前且》0.98,滞后且》0.95,在这个范围内,此时控制器没有控制信号发出,这时已投入的电容器组不退出,没投入的电容器组也不投入。当检测到COSΦ不满足要求时,如COSΦ滞后且《0.95,那么将一组电容器投入,并继续监测COSΦ如还不满足要求,控制器则延时一段时间(延时时间可整定),再投入一组电容器,直到全部投入为止。当检测到超前信号如COSΦ《0.98,即呈容性载荷时,那么控制器就逐一切除电容器组。要遵循的原则就是:先投入的那组电容器组在切除时就要先切除。如果把延时时间整定为300S,而这套补偿装置有十路电容器组,那么全部投入的时间就为30分钟,切除也这样。在这段时间内无功损失补只能是逐步到位。如果将延时时间整定的很短,或没有设定延时时间,就可能会出现这样的情况。当控制器监测到COSΦ〈0.95,迅速将电容器组逐一投入,而在投
常用传感器的工作原理及应用
3.1.1电阻式传感器的工作原理 应变:物体在外部压力或拉力作用下发生形变的现象 弹性应变:当外力去除后,物体能够完全恢复其尺寸和形状的应变 弹性元件:具有弹性应变特性的物体 3.1.3电阻应变式传感器 电阻应变式传感器利用电阻应变片将应变转换为电阻值变化的传感器。 工作原理:当被测物理量作用于弹性元件上,弹性元件在力、力矩或压力等的作用下发生变形,产生相应的应变或位移,然后传递给与之相连的应变片,引起应变片的电阻值变化,通过测量电路变成电量输出。输出的电量大小反映被测量的大小。 结构:应变式传感器由弹性元件上粘贴电阻应变片构成。 应用:广泛用于力、力矩、压力、加速度、重量等参数的测量。 1.电阻应变效应 ○
电阻应变片的工作原理是基于应变效应,即导体或半导体材料在外界力的作用下产生机械变形时,其电阻值相应发生变化,这种现象称为“应变效应”。 2.电阻应变片的结构 基片 b l 电阻丝式敏感栅 金属电阻应变片的结构 4.电阻应变式传感器的应用 (1)应变式力传感器 被测物理量:荷重或力 一
二 主要用途:作为各种电子称与材料试验机的 测力元件、 发动机的推力测试、水坝坝体承载状况监测等。 力传感器的弹性元件:柱式、筒式、环式、悬臂式等 (2)应变式压力传感器 主要用来测量流动介质的动态或静态压力 应变片压力传感器大多采用膜片式或筒式 弹性元件。 (3)应变式容器内液体重量传感器 感压膜感受上面液体的压力。 (4)应变式加速度传感器 用于物体加速度的测量。 依据:a =F/m 。 3.2电容式传感器 3.2.1电容式传感器的工作原理 由绝缘介质分开的两个平行金属板组成的 平板电容器,如果不考虑边缘效应,其电容量为 当被测参数变化使得S 、d 或ε发生变化时, 电容量C 也随之变化。 d S C ε=
制冷系统及设备常见的故障原因及排除方法 1、冷系统安全运行必要的三个条件是什么? 2、什么叫蒸发温度? 3、什么叫冷凝温度? 4、什么叫再冷却( 或称过冷) 温度? 5、什么叫中间温度? 6、什么叫压缩机的吸气温度? 7、什么叫压缩机的排气温度? 8、什么叫潮车? 9、什么原因能造成潮车? 10、潮车后能造成什么后果? 11、如何排除潮车? 12、排气压力超高什么原因? 13、压缩机不能启动 14、压缩机启动后即停机 15、气缸内有敲击声(活塞机) 16、曲轴箱内有敲击声(活塞机) 17、压缩机启动后无油压 18、润滑油油压过低(活塞机) 19、压缩机耗油量增大 20、轴封漏油或漏气 21、压缩机卸载装置机构失灵 22、压缩机吸气温度比蒸发温度高(比规定值高) 23、压缩机排气温度相对压力下温度偏高 24、压缩机吸入压力太低 25、机组发生不正常振动(螺杆机) 26、制冷能力不足 27、机器运转中出现不正常的响声(螺杆机) 28、排气温度或油温过高 29、排气温度或油温下降 30、滑阀动作不灵活或不动作 31、螺杆压缩机体温度过高 32、压缩机及油泵轴封泄漏 33、油压过低 34、油消耗量大
35、油面上升 36、停车时压缩机反转 37、吸气温度低于应用温度 38、制冷系统及设备的调整压力值( 供参考) 39、高压系统试验压力是多少? 40、低压系统试验压力是多少? 41、系统真空试验压力是多少? 42、设备的检修期要求 43、螺杆压缩机组检修期限 1、冷系统安全运行必要的三个条件是什么? 答:(1) 系统内的制冷剂压力不得出现异常高压,以免设备破裂。 (2) 不得发生湿冲程、液爆、液击等误操作,以免设备被破坏。 (3) 运动部件不得有缺陷或紧固件松动,以免损坏机械。 2 、什么叫蒸发温度? 答:蒸发器内的制冷剂在一定压力下沸腾汽化时的温度称为蒸发温度。 3、什么叫冷凝温度? 答:冷凝器内的气体制冷剂,在一定的压力下凝结成液体的温度称为冷凝温度。 4 、什么叫再冷却( 或称过冷) 温度? 答:冷凝后的液体制冷剂在高温、高压下被冷却到低于冷凝温度后的温度称冷却温度( 或过冷温度) 。 5 、什么叫中间温度? 答:中问冷却器中制冷剂在中问压力(P2) 下所对应的饱和温度称中间温度。 6 、什么叫压缩机的吸气温度? 答:压缩机的吸气温度,可以从压缩机的吸气阀前面的温度计测得, 吸气温度一般都高于蒸发温度,其高出差值取决于回气管的长度与管道保温情况,一般应较蒸发温度高5~10 ℃( 称过热度) 。 7 、什么叫压缩机的排气温度? 答:压缩机的排气温度可以从排气管路上的温度计测得。排气温度的高低与压力比(PK/P·) 及吸气温度成正比,如果吸气的过热度越高, 压力比愈大, 则排气温度也就愈高, 否则相反, 一般排气压力稍高于冷凝压力。 8 、什么叫潮车? 答:制冷工质因未能或未充分吸热而将液体或湿蒸汽被压缩机吸入机内称为潮车 9 、什么原因能造成潮车? 答:(1) 系统中的气液分离器标高是否低于标准( 要求 1.2m 以上)。 (2) 系统中的自动控制液位失灵。 (3) 手动供液过大、过急( 或节流阀内漏或开启过大)。
. 电磁溢流阀工作原理 1)电磁溢流阀原理上,一般是由先导式溢流阀加上一个2位2通电磁阀组成。 2)这个电磁阀实际上由两部分组成:2位2通的液压阀部分,加上一个电磁铁。2位2通阀是开通,还是关闭,是由电磁铁推动阀芯运动来实现的。像楼上朋友讲的,有的阀电磁铁通电时打开,有的阀电磁铁断电时打开,萝目青菜个人各爱(根据系统要求选择)。也就是说,电磁阀这里有一条通路一头与先导溢流阀的某个部位相连,另一头通过油管与油箱相连。通过操作电磁铁可以让先导溢流阀的某个部位或者与油 箱相通,或者不与油箱相通。 3)先导溢流阀的主阀上腔压力,是由先导阀加于控制的。如果先导阀正常工作,即主阀上腔有先导阀规定的压力,则整个溢流阀就会在系统压力到达调定压力时其主阀口打开一定的开度,一方面能将系统多余流量流回油箱,另一方面又能维持系统的压力为先导阀的调定值。可见,先导阀主要管压力,主阀服从先导阀的领导,在先导阀动作时将主阀口开到合适大小,正好将多余流量流出去,又不影响系统压力。4)如果先导阀不调什么压力,也就是说主阀上腔没有先导阀控制的压力,这样主阀芯就解放了,由于没有来自上腔调压力,阀口就开到最大,油源来的油不再进入系统而以尽可能低的卸荷压力流回油箱。5)可见定差溢流阀中的电磁阀,仅仅在系统卸荷时(液压阀部分)流过1-2升/分的先导流量,而浩浩荡 荡的主流量还是通过主阀口流回油箱。 5)刚才讲的电磁阀的一头要与先导溢流阀的某个部位相连,什么部位?就是先导阀油路与主阀上腔连接到这个部位。这个部位平时与先导阀油路相连,这个部位的压力也就是主阀上腔调压力,由先导阀决定。现在有了电磁阀这个(并联的)接口,如果这个接口通过电磁阀与油箱相连,则主阀上腔也就基本没有什么压力了,就是系统卸荷了。但系统不需要卸荷时,电磁阀将并联的通油箱口关闭,将控制主阀上腔调权力交回给先导阀。并联的接口,就是一个边门的意思,平时边门关闭。发生火灾等紧急情况时,可以从边门 逃生 如有侵权请联系告知删除,感谢你们的配合! 精品
1、引言 S V C 全称为静态无功补偿装置即Static Var Compensator ,主要型式有TCR 和TSC 以及两者结合。输配电系统装设SVC 的主要用途是在动态或稳态情况下提供系统电压支持和HVDC 换流站的无功控制,同时也用于阻尼输电系统的功率振荡、平衡系统的三相电压和抑制由于负荷变化引起的波动。一般SVC 装置通过降压变压器对35KV 电压等级进行补偿。 2、SVC 原理概述 2.1 SVC 主接线 图1为220KV 干练变电站SVC 回路主接线示意图,该回路共由三个支路组成,其中包括TCR 支路(即称晶闸管和电抗器组成)的相控支路、三次滤波支路和五次滤波支路。TCR 支路为SVC 中最重要的组成部分,我们可以通过对晶闸管导通关断角大小的控制来改变该回路所输出感性电流的大小从而改变输出的感性无功。由于TCR 支路中所输出的电流包含一定量大小的谐波成分以三、五次为主,因此需要对输出的电流进行必要的滤波从而防止本地电能质量的下降。之所以把TCR 支 SVC 静态无功 补偿装置的原理和应用 沈小平 上海交通大学 路接成三角形也考虑到谐波的问题因为三角形接线可以使三次谐波不向外流出,但实际情况并没有那么理想因此需要三次滤波支路进行必要的滤波。 2.2 TCR 控制原理 我们都知道晶闸管阀导通时,阀两端电压为零,流经阀的电流全部流过TCR 支路。以半个周波为例当触发角为110°时,导通角为70°此时阀两端无压范围角为70°;当触发角165°时,导通角为15°此时阀两端无压范围角为15°;因此当触发角越小导通角越大,由于回路中串有电感,电流大小不能突变,导通角越大时阀导通电流有相对宽裕的范围升高到较大值,当导通角为30°或更小时,阀电流升到较大值的范围小,有时甚至没有升到较大值时阀已截止,即导通角越大电流越大。一般SVC 晶闸管阀正相触发角在110°~165°之间, 负相触发角在290°~345°之间。图2为晶闸管导通关断时电流示意图。 图2 这里必须指出TCR 触发角a 的可控范围是90度到180度。当触发角为90度时,晶闸管全导通,此时TCR 中的电流为连续正弦波形。当触发角从90度变到接近180度时,TCR 中的电流呈非连续脉冲波形,对称分布于正半波和负半波。当触发角低于90度时,将在电流中引入直流分量,从而破坏并联阀正负半波的对称运行。而当触发角为180度时,电流减小到零。为了能保证正负半波对称波形的质量,干练站SVC 图1
江苏省淮阴中学06-07年度优秀教学案例 《传感器及其工作原理》的创新教学设计 王刚 教学依据 ①物理(新人教版)选修3-2第六章第1节《传感器及其工作原理》(P56-P60); ②新物理课程标准(实验). 教学流程图
教学目标1.知识与技能:①知道非电学量转换成电学量的技术意义;②通过实验,知道常见传感器的工作原理;③初步探究利用和设计简单的传感器. 2.过程与方法:①通过对实验的观察、思考和探究,让学生了解传感器、熟悉传感器工作原理;②让学生自己设计简单的传感器,经历科学探究过程,学习科学研究方法,培养学生的实践能力和创新思维能力. 3.情感态度与价值观:在理解传感器工作原理的基础上,通过自己设计简单的传感器,体验科技创新的乐趣,激发学习物理的兴趣. 重、难点 1.几种常见传感器的工作原理(演示实验);2.学生自己设计简单的传感器. 教学策略 用几个有趣的传感器实验引入课题,激发学生探究传感器原理的兴趣.给出“传感器就是把非电学量转换为电学量”的概念之后,重点介绍光敏电阻、金属热电阻、热敏电阻.安排音乐茶杯和火警装置两个设计性问题让学生体会传感器的简单应用.结合电容、霍尔效应、电阻定律等知识让学生设计传感器,进一步深化传感器的工作原理.最后在对本节课总结的基础上,结合《思考与讨论》进行教学反馈. 教学程序 教学环节教学内容及师生互动设计情感与方法 一.课题的引入 二.什么是传感器?【演示实验1】干簧管控制电路的通断 如图,小盒子A的侧面露出一个小灯泡,盒外没有开 关,但是把磁铁B放到盒子上面,灯泡就会发光,把磁铁移 走,灯泡熄灭. 师问:盒子里有怎样的装置,才能实现这样的控制? 生猜:(可以自由讨论,也可以请学生回答) 师生探究:打开盒子,用实物投影仪展示盒内的电路 图,了解元件“干簧管”的结构。探明原因:玻璃管内封入 两个软磁性材料制成的簧片。当磁铁靠近干簧管时,两个簧 片被磁化而接通,电路导通。所以,干簧管能起到开关的作 用。 师点拨:这个装置反过来还可以让我们通过灯泡的发 光情况,感知干簧管周围是否存在着磁场。 【演示实验2】声光控开关控制电路的通断 ①先在普通光照条件下, ②在把开关置于黑暗环境中。 师生总结:声光控开关 师:刚才的两个实验,都用了一种元件,这些元件能够 感受某些信息,通过它能实现电路的自动控制,这种元件有 一个专门的名称:传感器。什么是传感器呢?它能够感受诸 如力、温度、光、声、化学成分等非电学量,并能把它们按 照一定的规律转换为电压、电流等电学量,或转换为电路的 通断。我们把这种元件叫做传感器。它的优点是:把非电学 量转换为电学量以后,就可以很方便地进行测量、传输、处 理和控制了。 其实,传感器并不神秘。你家里可能就有很多的传感 器。请大家相互说说看,你家里,或者在你的生活当中,都 (演示实验1: 干簧管传感器) (干簧管的实 物及原理图) 学生对干簧 管并不熟悉,因 此才有了好奇。 声光控开关在 生活中很普及, 所以又有亲切 感
振动传感器种类、原理及发展趋势 【摘要】振动传感器是一种能感受机械运动振动的参量(振动速度、频率,加速度等)并转换成可用输出信号的传感器。 在高度发展的现代工业中,现代测试技术向数字化、信息化方向发展已成必然发展趋势,而测试系统的最前端是传感器,它是整个测试系统的灵魂,被世界各国列为尖端技术,特别是近几年快速发展的IC技术和计算机技术,为传感器的发展提供了良好与可靠的科学技术基础。使传感器的发展日新月益,且数字化、多功能与智能化是现代传感器发展的重要特征。 【关键词】种类;原理;发展趋势 【Abstract】:Vibration transducer is atransducer that can feel the vibration of a mechanical movement parameters (frequency of the vibration velocity, acceleration, etc.) and converted into usable output signal of the sensor. At the height of the development of modern industry, modern testing technology to digitization, information management has become an inevitable trend of development, and testing system for the front end is the sensor, it is the soul of an entire test system, is listed as a leading-edge technology around the world, particularly in recent years, the rapid development of IC technology and computer technology, the development of a sensor provides a good and reliable scientific and technology base. Place the sensor development, Crescent IK, and multipurpose digital, is a modern and intelligent sensor development, an important feature. 【Keywords】:type , principle , inevitable trend of development 振动传感器的分类
浅谈无功补偿原理及无功补偿率 无功补偿原理 电网中的电力负荷如电动机、变压器等,大部分属于感性负荷,在运行过程中需向这些设备提供相应的无功功率。在电网中安装并联电容器等无功补偿设备以后,可以提供感性负载所消耗的无功功率,减少了电网电源向感性负荷提供、由线路输送的无功功率,由于减少了无功功率在电网中的流动,因此可以降低线路和变压器因输送无功功率造成的电能损耗,这就是无功补偿。 简介编辑 无功补偿原理 当电网电压的波形为正弦波,且电压与电流同相位时,电阻性电气设备如白炽灯、电热器等从电网上获得的功率P等于电压U和电流I的乘积,即:P=U×I。 电感性电气设备如电动机和变压器等由于在运行时需要建立磁场,此时所消耗的能量不能转化为有功功率,故被称为无功功率Q。此时电流滞后电压一个角度φ。在选择变配电设备时所根据的是视在功率S,即有功功率和无功功率的矢量和: 无功功率为: 有功功率与视在功率的比值为功率因数: cosf=P/S 无功功率的传输加重了电网负荷,使电网损耗增加,系统电压下降。故需对其进行就近和就地补偿。并联电容器可补偿或平衡电气设备的感性无功功率。当容性无功功率QC等于感性无功功率QL时,电网只传输有功功率P。根据国家有关规定,高压用户的功率因数应达到0.9以上,低压用户的功率因数应达到0.85以上。 如果选择电容器功率为Qc,则功率因数为: cosφ= P/ (P2 + (QL-Qc)2)1/2 在实际工程中首先应根据负荷情况和供电部门的要求确定补偿后所需达到的功率因数值,然后再计算电容器的安装容量: Qc = P(tanf1 - tanf2)=P〔(1/cos2f1-1)1/2-(1/cos2f2-1)1/2〕 式中:
制冷系统十大常见故障原因 回液 1、对于使用膨胀阀的制冷系统,回液与膨胀阀选型和使用不当密切相关。 膨胀阀选型过大、过热度设定太小、感温包安装方法不正确或绝热包扎破损、膨胀阀失灵都可能造成回液。 2、对于使用毛细管的小制冷系统而言,加液量过大会引起回液。蒸发器结 霜严重或风扇故障时传热变差,未蒸发的液体会引起回液。温度频繁波动也会引起膨胀阀反应失灵而引起回液。 对于回液较难避免的制冷系统,安装气液分离器控制可以有效阻止或降低回液的危害。 带液启动 1、压缩机内的润滑油剧烈起泡的现象叫带液启动。带液启动时的起泡现象 可以在油视镜上清楚地观察到。根本原因是润滑油中溶解的以及沉在润滑油下面了大量的制冷剂,在压力突然降低时突然沸腾,并引起润滑油的起泡现象,很容易引起液击。 2、压缩机安装曲轴箱加热器(电热器)可以有效防止制冷剂迁移。短时间 停机,维持曲轴箱加热器通电。长时间停机不用后,开机前先加热润滑油几个或十几个小时。回气管路上安装气液分离器,可以增加制冷剂迁移的阻力,降低迁移量。 回油 1、当压缩机比蒸发器的位置高时,垂直回气管上的回油弯是必需的。回油 弯要尽可能紧凑,以减小存油。回油弯之间的间距要合适,回油弯的数量比较多时,应该补充一些润滑油。 2压缩机频繁启动不利于回油。由于连续运转时间很短压缩机就停了,回气 管内来不及形成稳定的高速气流,润滑油就只能留在管路内。回油少于奔油,压缩机就会缺油。运转时间越短,管线越长,系统越复杂,回油问题就越突出。 3缺油会引起严重的润滑不足,缺油的根本原因不在于压缩机奔油多少和快 慢,而是系统回油不好。安装油分离器可以快速回油,延长压缩机无回油运转时间。
全向振动传感器 它是一种全方位固态振动控制器件,传感部分采用目前最先进的固态加速度检测器件,既对振动有很高的检测灵敏度,也对周围环境的声音信号抑制,具有很强的抗干扰能力。 目前所出现的振动传感器为一弹簧振子,通过碰撞实现振动感应,主要缺点是有方向性,可靠性差。针对这一缺陷,本方案使用的传感器, 克服了这一弱点。敏感器件采用压电陶瓷片,置于一密闭腔中,两侧为金属小球,空腔设计为球形, 以利用小球滚动。在三维空间中,无论传感器在什么方位,始终有小球与压电陶瓷片接触。在振动时,小球对压电陶瓷片压力变化,产生脉动电压, 从而实现振动感应。因为本振动传感器的输出电压幅度主要取决于振动强度,在不同方向上振动, 输出电压太小差别不大,故为全方向性。 (1) 全向振动传感器工作原理 全向振动传感器,是一种目前广泛应用的报警检测传感器,它内部用压电陶瓷片加弹簧重锤结构检测振动信号,并通过LM358等运放放大并输出控制信号。如图2-8所示为全向振动传感器电路图。 ND-2采用特别设计的低功耗检测控制芯片,静态耗电小于1μA ,是目前振动传感器中耗电最小的器件。为了方便使用,采用引线方式。引线连接方式:红线为电源正极,绿线为输出端,黑线为地。如图2-9所示为ND-2引线图。 当检测到振动大于一定幅度时,动作指示灯点亮,并发出报警。振动检测的灵敏度可以通过灵敏度调节旋钮调节,顺时针灵敏度增加,逆时针灵敏度降低。 3V 图2-8 全向振动传感器电路图 红 绿 黑 图2-9 ND-2引线图 如图2-10所示,ND-2采用集电极开路输出方式,其内部三极管的控制电流不小于10mA 。受内部定时器的控制,每检测出一次振动信号,三极管导通5秒,
航天大厦中央空调系统常见故障分析——李苏雄 航天大厦是麦克维尔(型号:WSC087LAU49F/E2609/C2609/R134A)冷水机组:700冷吨2台、400冷吨1台(总负荷:1100冷吨);冷冻泵75KW3台、45KW2台;冷却泵75KW3台、45KW2台;冷却塔()水吨配电机5.5KW10台;同时采用高效的变频节能系统;末端设施采用风柜(台)和风机盘管(台)按系统管道三管路段分层供冷;这就由冷却塔――冷却泵――主机――冷冻泵――风柜(盘管)+辅助设施(管道\阀\减振器\集水器\分水器等)以R134A为冷源,水的循环来实现热的搬迁;这些配置过于大。 按实际核算是:700TR是490KW,冷冻水流量为420立方/H配泵55KW;冷却水流量为517立方/H配泵75KW;冷却塔(800水吨)水流量为517立方/H配泵22KW; 400TR是280KW,冷冻水流量为240立方/H配泵30KW;冷却水流量为295立方/H配泵37KW;冷却塔(500水吨)水流量为295立方/H配泵11KW(上述数据是本人根据机组配置计算来);现在对中央空调系统常见故障与分析讲解如下: 一、离心机组的常见故障、并进行分析: 故障可能的原因故障排除 1、症状:排气压力过高/反常。 冷凝器的液体制冷剂出口 温度与冷媒水出口温度的温差超 出正常范围 冷凝器中有空气 排气压力过高冷凝器传热管太脏或者结 后 清洁冷凝器传热管/检查水质 冷却水温度过高降低冷却水的出口温度(检 查冷却塔和水的流动情况) 冷却水的进、出口温差超出冷却水流量不够增大冷却水流量
正常范围、同时蒸发压力正常 2、症状:吸气压力过低/反常。 蒸发器的冷冻水出口温度与制冷剂进口温度的温差超出正常范围、同时排气温度过高制冷剂充注不足对系统检漏、并添加制冷剂节流孔堵塞清除堵塞 蒸发器的冷冻水出口温度 与制冷剂进口温度的温差超出正 常范围、同时排气温度过高 蒸发器传热管太脏或堵塞清除堵塞 冷冻水温度过低、同时电机电流过少跟系统容量相比、负荷不足检查导流叶片电机的运行、 设定低水温切断值 3、症状:蒸发压力过高。 冷冻水温度过高导流叶片未能打开检查导流叶片电机的定位 电路 系统过载确保叶片全部打开(不要让 电机过载)、直到负荷降低为止4、症状:按下系统启动键后、油压尚未建立。 控制盘上显示的油压过低、压缩机不能启动油泵转向错误检查油泵的转向(检查接 线) 油泵不转检查油泵的接线、按下油泵 启动器(装在冷凝器筒体上)的手 动复位 5、症状:压缩机启动、油压正常、短时间波动、然后压缩机因油压截断值而停机。 油压正常、短时间波动、然后压缩机因油压截断值而停机。会显示“油压过低”的信息 存在不正常的启动情况如 因系统压力下降,导致油横和油管 中出现泡沫 将压缩机中的润滑油排掉, 然后加新油 油加热器烧毁更换油加热器
5.2 常见传感器的工作原理 [课时安排]1课时 [教学目标]: (一)知识与技能 1.通过实物认识光敏电阻,了解光传感器的工作原理。了解光传感器的用途。2.通过实物认识热电偶和热敏电阻,了解温度传感器的工作原理。了解温度传感器的用途。 3.利用传感器制作简单的自动控制装置,通过实验认识传感器,体会非电学量转换成电学量好处。 (二)过程与方法 实验探究及要求学生使用多种资源去收集信息,多整理信息,最后形成书面报告在课堂上与教师和同学交流。 (三)情感、态度与价值观 激发学生的学习兴趣,拓展他们的视野,培养学生收集信息、与他人进行交流的能力,提高他们的创新意识。 通过分析事例,培养学生全面认识和对待事物的科学态度。 [教学重难点]:光敏电阻和热敏电阻的工作原理及实验设计 [教学器材]:光敏电阻和热敏电阻,小灯炮,干簧管,欧姆表,烧杯,导线,二极管,干电池,开水等 [教学方法]:实验探究,讲授 [教学过程] (一)引入新课 通过教师演示实验,用光敏电阻控制小灯炮的亮暗。 (二)进行新课 一、.光电传感器原理 1、工作原理:光电传感器是指能够感受光信号,并按照一定规律把光信号 转换成电学量信号器件。 光电检测系统中实现光电转换的关键元件,它是把光信号(红外、可见及紫外光辐射)转变成为电信号的器件。光电式传感器是以光电器件作为转换元件的传感器。它可用于检测直接引起光量变化的非电量,如光强、光照度、辐射测温、气体成分分析等;也可用来检测能转换成光量变化的其他非电量,如零件直径、表面粗糙度、应变、位移、振动、速度、加速度,以及物体的形状、工作状态的识别等。光电式传感器具有非接触、响应快、性能可靠等特点,因此在工业自动化装置和机器人中获得广泛应用。近年来,新的光电器件不断涌现,特别是CCD图像传感器的诞生,为光电传感器的进一步应用开创了新的一页。 2、干簧管: 3、光敏电阻: A:实验探究及见课件: 用多用电表测量光敏电阻的阻值,改变入射到光敏电阻上光的强度,再次测量阻值,并将各数据记人表格
电磁溢流阀工作原理 1)电磁溢流阀原理上,一般是由先导式溢流阀加上一个2位2通电磁阀组成。 2)这个电磁阀实际上由两部分组成:2位2通的液压阀部分,加上一个电磁铁。2位2通阀是开通,还是关闭,是由电磁铁推动阀芯运动来实现的。像楼上朋友讲的,有的阀电磁铁通电时打开,有的阀电磁铁断电时打开,萝目青菜个人各爱(根据系统要求选择)。也就是说,电磁阀这里有一条通路一头与先导溢流阀的某个部位相连,另一头通过油管与油箱相连。通过操作电磁铁可以让先导溢流阀的某个部位或者与油 箱相通,或者不与油箱相通。 3)先导溢流阀的主阀上腔压力,是由先导阀加于控制的。如果先导阀正常工作,即主阀上腔有先导阀规定的压力,则整个溢流阀就会在系统压力到达调定压力时其主阀口打开一定的开度,一方面能将系统多余流量流回油箱,另一方面又能维持系统的压力为先导阀的调定值。可见,先导阀主要管压力,主阀服从先导阀的领导,在先导阀动作时将主阀口开到合适大小,正好将多余流量流出去,又不影响系统压力。4)如果先导阀不调什么压力,也就是说主阀上腔没有先导阀控制的压力,这样主阀芯就解放了,由于没有来自上腔调压力,阀口就开到最大,油源来的油不再进入系统而以尽可能低的卸荷压力流回油箱。5)可见定差溢流阀中的电磁阀,仅仅在系统卸荷时(液压阀部分)流过1-2升/分的先导流量,而浩浩荡 荡的主流量还是通过主阀口流回油箱。 5)刚才讲的电磁阀的一头要与先导溢流阀的某个部位相连,什么部位?就是先导阀油路与主阀上腔连接到这个部位。这个部位平时与先导阀油路相连,这个部位的压力也就是主阀上腔调压力,由先导阀决定。现在有了电磁阀这个(并联的)接口,如果这个接口通过电磁阀与油箱相连,则主阀上腔也就基本没有什么压力了,就是系统卸荷了。但系统不需要卸荷时,电磁阀将并联的通油箱口关闭,将控制主阀上腔调权力交回给先导阀。并联的接口,就是一个边门的意思,平时边门关闭。发生火灾等紧急情况时,可以从边门 逃生
什么叫无功补偿装臵 总的来说“无功补偿装臵”就是个无功电源。 一般电业规定功率因数为低压0.85以上,高压0.9以上。为了克服无功损耗,就要采用无功补偿装臵来解决。 电力系统中现有的无功补偿设备有无功静止式补偿装臵和无功动态补偿装臵两类,前者包括并联电容器和并联电抗器,后者包括同步补偿机(调相机)和静止型无功动态补偿装臵(SVS)。 并联电抗器的功能是: 1)吸收容性电流,补偿容性无功,使系统达到无功平衡; 2)可削弱电容效应,限制系统的工频电压升高及操作过电压。其不足之处是容量固定的并联电抗器,当线路传输功率接近自然功率时,会使线路电压过分降低,且造成附加有功损耗,但若将其切除,则线路在某些情况下又可能因失去补偿而产生不能允许的过电压。
改进方法是采用可控电抗器,它借助控制回路直流的励磁改变铁心的饱和度(即工作点),从而达到平滑调节无功输出的目的。 工业上采用 1.同步电机和同步调相机; 2.采用移相电容器; 目前大多数采用移相电容器为主。 无功补偿对于降低线损有哪些作用? 电网的损耗分为管理线损和技术线损。管理线损通过管理和组织上的措施来降低;技术线损通过各种技术措施来降低。无功补偿是利用技术措施降低线损的重要措施之一,在有功功率合理分配的同时,做到无功功率的合理分布。按照就近的原则安排减少无功远距离输送。对各种方式进行线损计算制定合理的运行方式;合理调整和利用补偿设备提高功率因数。 1、提高负荷的功率因数
提高负荷的功率因数,可以减少发电机送出的无功功率和通过线路、变压器传输的无功功率,使线损大为降低,而且还可以改善电压质量、提高线路和变压器的输送能力。 2、装设无功补偿设备 应当根据电网中无功负荷及无功分布情况合理选择无功补偿容量和确定补偿容量的分布,以进一步降低电网损耗。 农村低压客户的用电现状以及无功补偿在低压降损中的作用有哪些? 90年代以前,农村低压用电以居民生活用电为主,其负荷主要是照明用白炽灯,不仅用电量少而且负荷性质基本是纯电阻性(COSφ≈1),而低压动力用户的负荷功率因数虽然较低,但其用电量占总售电量的比例较小,故影响不大。近些年来,由于各种现代家用电器的迅速普及和大量使用,居民生活用电不仅用电量有了较大的增长,更重要的是其负荷性质有了很大的改变。与此同时,低压动力客户电量增长迅速,近几年已经占到了农村总用电量比重的60%~70%,主要以纺织行业、机械加工为主,而且动力客户的用电量明显呈现出继续增长趋势。这些动力客户,其设备自然功率因数较低(COSφ=0.6~0.7),且经常处于低功率因数运行状况。
机电一体化技术常用传感器及其原理 班级:机械设计制造及其自动化姓名: 学号:
一、传感器的分类 传感器有许多分类方法,但常用的分类方法有两种,一种是按被测物理量来分;另一种是按传感器的工作原理来分。按被测物理量划分的传感器,常见的有:温度传感器、湿度传感器、压力传感器、位移传感器、流量传感器、液位传感器、力传感器、加速度传感器、转矩传感器等。 按工作原理可划分为: 1.电学式传感器 电学式传感器是非电量电测技术中应用范围较广的一种传感器,常用的有电阻式传感器、电容式传感器、电感式传感器、磁电式传感器及电涡流式传感器等。 电阻式传感器是利用变阻器将被测非电量转换为电阻信号的原理制成。电阻式传感器一般有电位器式、触点变阻式、电阻应变片式及压阻式传感器等。电阻式传感器主要用于位移、压力、力、应变、力矩、气流流速、液位和液体流量等参数的测量。 电容式传感器是利用改变电容的几何尺寸或改变介质的性质和含量,从而使电容量发生变化的原理制成。主要用于压力、位移、液位、厚度、水分含量等参数的测量。 电感式传感器是利用改变磁路几何尺寸、磁体位置来改变电感或互感的电感量或压磁效应原理制成的。主要用于位移、压力、力、振动、加速度等参数的测量。 磁电式传感器是利用电磁感应原理,把被测非电量转换成电量制成。主要用于流量、转速和位移等参数的测量。 电涡流式传感器是利用金屑在磁场中运动切割磁力线,在金属内形成涡流的原理制成。主要用于位移及厚度等参数的测量。 2.磁学式传感器 磁学式传感器是利用铁磁物质的一些物理效应而制成的,主要用于位移、转矩等参数的
测量。 3.光电式传感器 光电式传感器在非电量电测及自动控制技术中占有重要的地位。它是利用光电器件的光电效应和光学原理制成的,主要用于光强、光通量、位移、浓度等参数的测量。 4.电势型传感器 电势型传感器是利用热电效应、光电效应、霍尔效应等原理制成,主要用于温度、磁通、电流、速度、光强、热辐射等参数的测量。 5.电荷传感器 电荷传感器是利用压电效应原理制成的,主要用于力及加速度的测量。 6.半导体传感器 半导体传感器是利用半导体的压阻效应、内光电效应、磁电效应、半导体与气体接触产生物质变化等原理制成,主要用于温度、湿度、压力、加速度、磁场和有害气体的测量。 7.谐振式传感器 谐振式传感器是利用改变电或机械的固有参数来改变谐振频率的原理制成,主要用来测量压力。 8.电化学式传感器 电化学式传感器是以离子导电为基础制成,根据其电特性的形成不同,电化学传感器可分为电位式传感器、电导式传感器、电量式传感器、极谱式传感器和电解式传感器等。电化学式传感器主要用于分析气体、液体或溶于液体的固体成分、液体的酸碱度、电导率及氧化还原电位等参数的测量。 另外,根据传感器对信号的检测转换过程,传感器可划分为直接转换型传感器和间接转换型传感器两大类。前者是把输入给传感器的非电量一次性的变换为电信号输出,如光敏电