变桨系统
8.1变桨系统原理
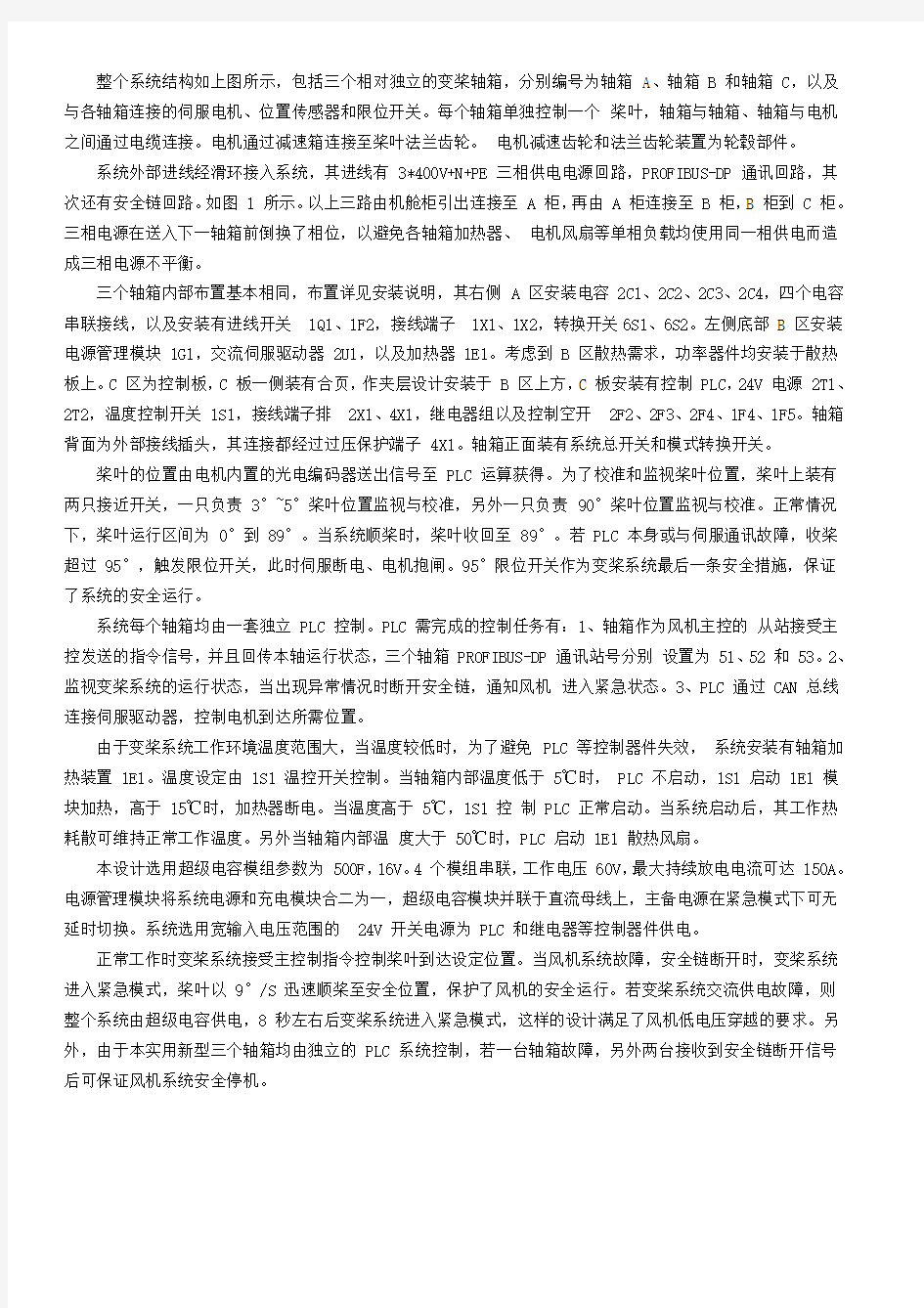
整个系统结构如上图所示,包括三个相对独立的变桨轴箱,分别编号为轴箱 A、轴箱 B 和轴箱 C,以及与各轴箱连接的伺服电机、位置传感器和限位开关。每个轴箱单独控制一个桨叶,轴箱与轴箱、轴箱与电机之间通过电缆连接。电机通过减速箱连接至桨叶法兰齿轮。电机减速齿轮和法兰齿轮装置为轮毂部件。
系统外部进线经滑环接入系统,其进线有 3*400V+N+PE 三相供电电源回路,PROFIBUS-DP 通讯回路,其次还有安全链回路。如图 1 所示。以上三路由机舱柜引出连接至 A 柜,再由 A 柜连接至 B 柜,B 柜到 C 柜。三相电源在送入下一轴箱前倒换了相位,以避免各轴箱加热器、电机风扇等单相负载均使用同一相供电而造成三相电源不平衡。
三个轴箱内部布置基本相同,布置详见安装说明,其右侧 A 区安装电容 2C1、2C2、2C3、2C4,四个电容串联接线,以及安装有进线开关 1Q1、1F2,接线端子 1X1、1X2,转换开关6S1、6S2。左侧底部 B 区安装电源管理模块 1G1,交流伺服驱动器 2U1,以及加热器 1E1。考虑到 B 区散热需求,功率器件均安装于散热板上。C 区为控制板,C 板一侧装有合页,作夹层设计安装于 B 区上方,C 板安装有控制 PLC,24V 电源 2T1、2T2,温度控制开关 1S1,接线端子排 2X1、4X1,继电器组以及控制空开 2F2、2F3、2F4、1F4、1F5。轴箱背面为外部接线插头,其连接都经过过压保护端子 4X1。轴箱正面装有系统总开关和模式转换开关。
桨叶的位置由电机内置的光电编码器送出信号至 PLC 运算获得。为了校准和监视桨叶位置,桨叶上装有两只接近开关,一只负责3°~5°桨叶位置监视与校准,另外一只负责90°桨叶位置监视与校准。正常情况下,桨叶运行区间为0°到89°。当系统顺桨时,桨叶收回至89°。若 PLC 本身或与伺服通讯故障,收桨超过95°,触发限位开关,此时伺服断电、电机抱闸。95°限位开关作为变桨系统最后一条安全措施,保证了系统的安全运行。
系统每个轴箱均由一套独立 PLC 控制。PLC 需完成的控制任务有:1、轴箱作为风机主控的从站接受主控发送的指令信号,并且回传本轴运行状态,三个轴箱 PROFIBUS-DP 通讯站号分别设置为 51、52 和 53。2、监视变桨系统的运行状态,当出现异常情况时断开安全链,通知风机进入紧急状态。3、PLC 通过 CAN 总线连接伺服驱动器,控制电机到达所需位置。
由于变桨系统工作环境温度范围大,当温度较低时,为了避免 PLC 等控制器件失效,系统安装有轴箱加热装置 1E1。温度设定由 1S1 温控开关控制。当轴箱内部温度低于 5℃时, PLC 不启动,1S1 启动 1E1 模块加热,高于 15℃时,加热器断电。当温度高于 5℃,1S1 控制 PLC 正常启动。当系统启动后,其工作热耗散可维持正常工作温度。另外当轴箱内部温度大于 50℃时,PLC 启动 1E1 散热风扇。
本设计选用超级电容模组参数为 500F,16V。4 个模组串联,工作电压 60V,最大持续放电电流可达 150A。电源管理模块将系统电源和充电模块合二为一,超级电容模块并联于直流母线上,主备电源在紧急模式下可无延时切换。系统选用宽输入电压范围的 24V 开关电源为 PLC 和继电器等控制器件供电。
正常工作时变桨系统接受主控制指令控制桨叶到达设定位置。当风机系统故障,安全链断开时,变桨系统进入紧急模式,桨叶以9°/S 迅速顺桨至安全位置,保护了风机的安全运行。若变桨系统交流供电故障,则整个系统由超级电容供电,8 秒左右后变桨系统进入紧急模式,这样的设计满足了风机低电压穿越的要求。另外,由于本实用新型三个轴箱均由独立的 PLC 系统控制,若一台轴箱故障,另外两台接收到安全链断开信号后可保证风机系统安全停机。
8.2变桨系统逻辑原理
TR变桨系统由三个功能和结构相同的轴柜组成,每个轴柜结构如图所示:
1、自动模式下,变桨PLC接受风机主控位置指令,经过前馈与比例环节运算输出速度指令,通过CAN通讯传给AC2变频器,变频器完成速度环与电流环运算驱动电机至指定位置,以下是各核心部件功能。
2、变频器与电机:直接从DC Link获取能量,正常情况下,接受PLC速度指令,完成驱动功能,当PLC或CAN通讯故障时,直接驱动变桨至限位开关动作停止。
3、PLC控制器:接受风机主控指令,完成位置环运算,控制变桨跟随风机主控位置指令,返回变桨状态至风机主控,同时监视变桨自身状态,完成各种逻辑保护功能及其它辅助回路控制。
4、电源管理模块:从滑环获取主电源,维持DC Link电压恒定,当主电源故障时,通过综合报警信号告知PLC电源出现故障。
5、超级电容:正常工作时,支撑DC Link电压。主电源故障时,作为后备电源为变桨提供足够的顺桨能量。
6、每个轴柜都有完全独立的控制及功率驱动部分,三柜之间无任何联系。
7、当系统输入主电源出现故障时,变桨系统依靠后备电源顺桨,其它情况均依靠主电源供电。
8、变桨系统故障均由自身PLC判断并进入紧急模式,紧急模式下,变桨主动断开安全链且将故障上传至风机主控。安全链断开后,变桨自行顺桨至安全位置。
9、动维护模式下,任意时刻只允许一个桨叶离开安全位置。
变桨系统维护
华锐风电科技有限公司 风力发电机组培训教材 变桨部分 1.变桨控制系统简介
变桨控制系统包括三个主要部件,驱动装置-电机,齿轮箱和变桨轴承。从额定功率起,通过控制系统将叶片以精细的变桨角度向顺桨方向转动,实现风机的功率控制。如果一个驱动器发生故障,另两个驱动器可以安全地使风机停机。 变桨控制系统是通过改变叶片迎角,实现功率变化来进行调节的。通过在叶片和轮毂之间安装的变桨驱动电机带动回转轴承转动从而改变叶片迎角,由此控制叶片的升力,以达到控制作用在风轮叶片上的扭矩和功率的目的。在90度迎角时是叶片的工作位置。在风力发电机组正常运行时,叶片向小迎角方向变化而达到限制功率。一般变桨角度范围为0~86度。采用变桨矩调节,风机的启动性好、刹车机构简单,叶片顺桨后风轮转速可以逐渐下降、额定点以前的功率输出饱满、额定点以的输出功率平滑、风轮叶根承受的
动、静载荷小。变桨系统作为基本制动系统,可以在额定功率范围内对风机速度进行控制。 变桨控制系统有四个主要任务: 1. 通过调整叶片角把风机的电力速度控制在规定风速之上的一个恒定速度。 2. 当安全链被打开时,使用转子作为空气动力制动装置把叶子转回到羽状位置(安全运行)。 3. 调整叶片角以规定的最低风速从风中获得适当的电力。 4. 通过衰减风转交互作用引起的震动使风机上的机械载荷极小化。 2.变桨轴承
2.1安装位置 变桨轴承安装在轮毂上,通过外圈螺栓把紧。其内齿圈与变桨驱动装置啮合运动,并与叶片联接 2.2工作原理 当风向发生变化时,通过变桨驱动电机带动变桨轴承转动从而改变叶片对风向地迎角,使叶片保持最佳的迎风状态,由此控制叶片的升力,以达到控制作用在叶片上的扭矩和功率的目的。
风力发电机组变桨系统介绍
一.概述 双馈风机
风轮:风轮一般由叶片、轮毂、盖板、连接螺栓组件和导流罩组成。风轮是风力机最关键的部件,是它把空气动力能转变成机械能。大多数风力机的风轮由三个叶片组成。叶片材料有木质、铝合金、玻璃钢等。风轮在出厂前经过试装和静平衡试验,风轮的叶片不能互换,有的厂家叶片与轮毂之间有安装标记,组装时按标记固定叶片。组装风轮时要注意叶片的旋转方向,一般都是顺时针。固定扭矩要符合说明书的要求。 风轮的工作原理:风轮产生的功率与空气的密度成正比。风轮产生的功率与风轮直径的平方成正比;风轮产生的功率与风速的立方成正比;风轮产生的功率与风轮的效率成正比。风力发电机风轮的效率一般在0.35—0.45之间(理论上最大值为0.593)。贝兹(Betz)极限 风机四种不同的控制方式: 1.定速定浆距控制(Fixed speed stall regulated) 发电机直接连到恒定频率的电网,在发电时不进行空气动力学控制 2.定速变浆距控制(Fixed speed pitch regulated) 发电机直接连到恒定频率的电网,在大风时浆距控制用于调节功率 3.变速定浆距控制(Variable speed stall regulated) 变频器将发电机和电网去耦(decouples),允许转子速度通过控制发电机的反力矩改变.在大风时,减慢转子直到空气动力学失速限制功率到期望的水平. 4.变速变浆距控制(Variable speed pitch regulated) 变频器将发电机和电网去耦(decouples), 允许通过控制发电机的反力矩改变转子速度.在大风时,保持力矩, 浆距控制用于调节功率.
Lust变桨系统调试说明 1、操作说明: 为确保系统调试安全,必须预先进行以下措施: ①现场调试人员必须佩戴好安全帽; ②400V电源的三相线、零线和地线必须可靠连接,避免缺相或漏接; ③上电前确认主控箱和轴控箱的开关处于断开状态; ④所有连接电缆连接正确(电机后面的编码器电缆号是S1、S2和S3;冗 余编码器的电缆号是T1、T2和T3,若反接,会出现飞车故障); ⑤上电前将电机的轴键拆除或利用扎带将其捆扎牢固; ⑥上电前确认电机与底座是否可靠固定; ⑦电池箱箱盖闭合(完成检查); 2、系统紧急顺桨: ①Profibus通信故障(或者不正常); ②Pitch Master故障; ③电机侧编码器故障; ④安全链信号输入无+24V(硬输入点); ⑤未提供+24COM(硬输入点); ⑥Emergency mode位为1; 3、手动模式 手动模式用于机械调零和现场安装调整用,转动速度为2.5度/秒。 手动模式前提条件: ①手动模式信号为1(硬输入点),并观察主控箱的9A1的第8通道的灯是 否点亮; ②Profibus通信正常,或者短接17K7的13、14引脚; ③Normal Operation Mode设置为0; ④Emergency Mode位为0; ⑤转动任一个桨叶时,另外两个桨叶为91度位置(或者通过关闭轴箱的电 源模拟); ⑥轴箱电池开关处于断开状态; ⑦手动旋钮的通道选择的0、1、2和3分别对应空档、轴控箱1、轴控箱2 和轴控箱3;转动方向旋钮控制的是电机的正传和反转; 4、自动模式
自动模式必须满足以下条件: ①先闭合主控箱的400V电源; ②Profibus通信正常; ③将Fault Reset置位1,然后置0; ④闭合轴箱的电池开关和电源开关前确保通信的Emerge Mode(读)为0 和Normal Operation Mode(写)为0;硬接点的Safety Signal(为高电平)、+24V和0V有正常连接,Manual Operation为0。否则会出现飞车现象; ⑤轴控箱上电顺序:先闭合电池开关(5Q1),然后闭合电源开关(6S1)。 正常状态下电机会由于内部的电路的控制不会出现转动; ⑥自动控制是通过通信软件控制,先设置好控制桨叶的目标角度、转速(建 议为3度/秒以下)和加速度(建议0.5~2度/秒2),然后将Normal Operation Mode置1,启动自动模式;若要中途停止,只能通过以下任一方式:将Normal Operation Mode置0、将对应的91度限位开关触发和关闭轴控箱电源(6S1); 5、限位开关 91度限位开关用于控制Pitch Master(主控变频器)的输出控制,当触发了该限位开关后,7K6复位,然后电机会停止,相对而言动作比较缓慢; 96度限位开关用于控制电机和Ptich Master的ENPO信号,当触发了该限位开关后,6K2和6K3复位,然后电机立即停止,相对而言动作比较迅速。 6、Bypass Bypass信号是用于旁通2个限位开关触发了以后继续启动电机转动,有硬信号和软信号之分。 Bypass软信号是对应91度限位开关。当91度触发了以后,利用通信将对应桨叶的Bypass信号置1,然后电机才可以往96度方向转动;而需要往0度方向转动不需要将对应桨叶的Bypass信号置1(实际上该Bypass信号用途不大); Bypass硬信号是对应96度限位开关,当96度触发了以后,利用硬结点的Bypass信号置1,然后电机只可以往0度方向转动; 7、温度预处理说明 根据通信中的所有温度值,需要在控制当中进行预处理,其温度的预处理值建议如下(根据Lust技术人员的建议): ①Pitch Master停机温度值为80度;
1.5MW风力发电机组 变桨系统原理及维护 国电联合动力技术有限公司 培训中心 (内部资料严禁外泄) UP77/82 风电机组变桨控制及维护
目录 1、变桨系统控制原理 2、变桨系统简介 3、变桨系统故障及处理 4、LUST与SSB变桨系统的异同 5、变桨系统维护 定桨失速风机与变桨变速风机之比较 定桨失速型风电机组 发电量随着风速的提高而增长,在额定风速下达到满发,但风速若再增加,机组出力反而下降很快,叶片呈现失速特性。 优点:机械结构简单,易于制造; 控制原理简单,运行可靠性高。 缺点:额定风速高,风轮转换效率低; 电能质量差,对电网影响大; 叶片复杂,重量大,不适合制造大风机 变桨变速型风电机组 风机的每个叶片可跟随风速变化独立同步的变化桨距角,控制机组在任
何转速下始终工作在最佳状态,额定风速得以有效降低,提高了低风速下机组的发电能力;当风速继续提高时,功率曲线能够维持恒定,有效地提高了风轮的转换效率。 优点:发电效率高,超出定桨机组10%以上; 电能质量提高,电网兼容性好; 高风速时停机并顺桨,降低载荷,保护机组安全; 叶片相对简单,重量轻,利于制造大型兆瓦级风机 缺点:变桨机械、电气和控制系统复杂,运行维护难度大。 变桨距双馈变速恒频风力发电机组成为当前国内兆瓦级风力发电机组的主流。 变桨系统组成部 分简介 变桨控制系统简介
?主控制柜 ?轴柜 ?蓄电池柜 ?驱动电机 ?减速齿轮箱 ?变桨轴承 ?限位开关 ?编码器 ?变桨主控柜 ?变桨
轴柜 ?蓄电池柜
?电机编码器 GM 400绝对值编码器共10根线,引入变桨控制柜,需按线号及颜色接入变桨控制柜端子排上。 ?限位开关
变桨控制系统培训教材 1. 变桨控制系统概述 变桨轴承 限位开关装 图1 变桨系统 变桨控制系统包括三个主要部件,驱动装置-电机,齿轮箱和变 桨轴承。从额定功率起,通过控制系统将叶片以精细的变桨角度向顺
桨方向转动,实现风机的功率控制。如果一个驱动器发生故障,另两个驱动器可以安全地使风机停机。 变桨控制系统是通过改变叶片迎角,实现功率变化来进行调节的。通过在叶片和轮毂之间安装的变桨驱动电机带动回转轴承转动从而改变叶片迎角,由此控制叶片的升力,以达到控制作用在风轮叶片上的扭矩和功率的目的。在90度迎角时是叶片的工作位置。在风力发电机组正常运行时,叶片向小迎角方向变化而达到限制功率。一般变桨角度范围为0~86度。采用变桨矩调节,风机的启动性好、刹车机构简单,叶片顺桨后风轮转速可以逐渐下降、额定点以前的功率输出饱满、额定点以的输出功率平滑、风轮叶根承受的动、静载荷小。变桨系统作为基本制动系统,可以在额定功率范围内对风机速度进行控制。 变桨控制系统有四个主要任务: 1.通过调整叶片角把风机的电力速度控制在规定风速之上的一 个恒定速度。 2.当安全链被打开时,使用转子作为空气动力制动装置把叶子转 回到羽状位置(安全运行)。 3.调整叶片角以规定的最低风速从风中获得适当的电力。 4.通过衰减风转交互作用引起的震动使风机上的机械载荷极小
化。 2.变桨轴承 变桨驱动装 变桨轴承 图2 变桨轴承和驱动装置 安装位置 变桨轴承安装在轮毂上,通过外圈螺栓把紧。其内齿圈与变桨驱 动装置啮合运动,并与叶片联接。 工作原理 当风向发生变化时,通过变桨驱动电机带动变桨轴承转动从而改
编号:( )字 号 本科生毕业设计 题目: 姓名: 学号: 班级: 二〇一四年六月 基于PCS7的变桨距风力发电机组 偏航控制系统设计
xx 矿业大学 本科生毕业设计 姓名:学号: 学院:信息与电气工程学院 专业:电气工程与自动化 设计题目:基于PCS7变桨距风力发电机组偏航控制系统设计指导教师:职称:教授 二〇一四年六月徐州
xx矿业大学毕业设计任务书 学院信电学院专业年级电气工程与自动化2010级姓名 任务下达日期:2013年12月30日 毕业设计日期:2013年12月30日至2014年6月10日 毕业设计题目:基于PCS7变桨距风力发电机组偏航控制系统设计毕业设计专题题目: 毕业设计主要内容和要求: 1、了解风力发电机组工作的基本原理; 2、掌握WinCC和STEP 7软件; 3、掌握基本过程控制策略; 4、构建偏航控制系统及其控制策略; 5、翻译英文文献一篇。 院长签字:指导教师签字: 年月日
xx矿业大学毕业设计指导教师评阅书 指导教师评语(①基础理论及基本技能的掌握;②独立解决实际问题的能力; ③研究内容的理论依据和技术方法;④取得的主要成果及创新点;⑤工作态度及工作量;⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等): 成绩:指导教师签字: 年月日
xxx矿业大学毕业设计评阅教师评阅书 评阅教师评语(①选题的意义;②基础理论及基本技能的掌握;③综合运用所学知识解决实际问题的能力;③工作量的大小;④取得的主要成果及创新点;⑤写作的规范程度; ⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等): 成绩:评阅教师签字: 年月日
直流电机驱动与控制系统设计 【摘要】介绍了基于AT89C52单片机,利用光电传感器检测直流电机的转速,采用PWM调速方式,通过AT89C52单片机产生控制信号直接控制驱动芯片LMD18200,从而间接控制直流电机的速度、正反转,以及停止,并可以调节速度至预先设定的速度。 【关键词】直流电机;单片机;lmd18200;PWM调速 直流电机在机器人和各种自动化控制领域发挥着重要的作用,而对电机速度的控制尤其重要,传统的控制系统通常采用模拟元件,如晶体管、各种线性运算电路等,虽在一定程度上满足了生产要求,但线路复杂、通用性差,控制效果受到器件性能、温度等因素的影响,从而使系统的运行特性也随之变化,故系统的运行可靠性及准确性得不到保证,甚至出现事故[1]。直流电机的数字控制已经成为了电动机控制的发展趋势,用单片机对电动机进行控制是实现电机数字控制的最常用手段,但是仅仅使用单片机进行控制会使运行程序复杂。为了减小单片机的负担,本文使用专门的直流电机控制芯片LMD18200,设计了一种基于单片机的直流电机驱动控制系统。 1.硬件电路的组成 系统硬件电路结构框图如图1所示,主要包括单片机电路、稳压电路、转速检测电路、转数显示电路、隔离电路、LMD18200驱动电路等。 1.1 稳压电路 硬件系统需要两个不同大小的电压供电。一个电压是所用驱动芯LMD18200电源端口的电压,该电压最大可以使用55V,在该硬件电路中使用的是24V;另一个电压大小为5V,该电压提供给单片机、转数测量电路中的LM393芯片以及隔离电路中的光电耦合芯片6N137。为了减少成本,硬件调试方便及满足设计的合理性,本设计中使用了稳压芯片LM7805,从而实现一个24V电源对整个硬件电路供电。具体电路如图2所示。电路左边接入24V的电经过稳压芯片LM7805将右边输出电压稳定到5V。 1.2 隔离电路 单片机输出的控制信号包括PWM控制信号和转向信号。由于驱动芯片LDM18200的控制信号是由单片机产生的,而驱动芯片输入电压较大,如果电路发生问题,电流就直接流入单片机,这样会对单片机造成损害,为了解决这个问题,在单片机和驱动芯片之间接入隔离电路,从而使单片机和驱动芯片进行隔离。同时考虑到PWM信号频率高[2],高达16.5khz,普通的光电隔离器件不能应用,故选用了高速光电耦合器芯片6N137。以PWM信号为例,转向信号类似,具体电路如图3所示,该种连接方法在传输过程中逻辑状态不变,单片机产生的PWM 信号从芯片6N137的3号引脚输入,从网络标号PWM端输出。 1.3 转速检测电路 采用光电传感器测量直流电机的转速。在直流电机转轴的末端贴上一个黑白交替的塑料卡片,该塑料卡片由三层组成,上下两层由透明塑料组成,中间夹着十张均匀分布的小黑纸。根据光电传感器的工作原理,直流电机转动一周,光电传感器输出引脚输出十个脉冲信号。同时考虑到光电传感器输出的脉冲信号不规则,将其输入到单片机后,不宜于单片机对其识别,因此在光电传感器的输出引脚连接一个由运放芯片LM393组成的脉冲整形电路[3]。具体电路如图4所示,
毕业论文 风力发电变桨距控制系统研究 学生姓名:XXXX学号:XXXXXX 系部:自动化 专业:自动化 指导教师:XXXXX 二〇一一年六月
诚信声明 本人郑重声明:本论文及其研究工作是本人在指导教师的指导下独立完成的,在完成论文时所利用的一切资料均已在参考文献中列出。 本人签名: 年月
摘要 能源、环境是当今人类生存和发展所要解决的紧迫问题。传统的化石燃料虽能解决能源短缺的问题,却给环境造成了很大的破坏,而风能具有无污染、可再生、低成本等优点,所以其受到世界各国的重视。 可靠、高效的风力发电系统的研发己经成为新能源技术领域的热点。然而,因为风能具有不稳定性、能量密度低和随机性等特点,同时风电厂通常位于偏远地区甚至海上,自然条件比较恶劣,因此要求其控制系统必须能够实现自动化运行,并且要求控制系统有高可靠性。所以对风力发电机组尤其是大型风电机组的控制技术的深入研究就具有相当重要的意义。 本文首先在对风力发电原理,风电机组研究的基础上从变桨距风力机空气动力学研究入手,分析了变桨距控制的基本规律,再结合目前国内主流的变桨距控制技术分别设计出了液压变桨距控制,电动变桨距控制的方案,最后在此基础上提出了一种较为理想的控制策——半桨主动失速控制。 关键词:风力发电,变桨距控制,伺服系统
Abstract Energy and environment is the human survival and development of the pressing problems which should be solved. The traditional fossil fuel can solve the energy shortage, but give environment caused the most damage, and wind have clean, renewable and low cost, so its advantages by world attention. Reliable and efficient wind power generation system research and development have already become the hot new energy technologies. However, because the wind is instability, energy density characteristics such as low and randomness, and wind power plant are usually located in remote areas and even at sea, natural condition is poor, so ask its control system must be able to realize automatic operation, and asked for the control system had high reliability. So for WTG especially large wind generator control technology research is of vital significance. This paper firstly in the principle of wind power generation, based on the study of the wind generator from getting away from a wind turbine propeller air dynamics research, analyses from the basic control variable OARS, coupled with the current domestic law change from the mainstream of the OARS were designed control technology from control hydraulic change propeller, electric control scheme of variable propeller from last, based on this, advances a more ideal control strategy - half oar active stall control. Keywords: Wind power, From control variable oar ,Servo system
第四章数控机床的驱动与控制系统 第一节位移、速度、位置传感器 数控机床若按伺服系统有无检测装置进行分类,可分为开环系统和闭环(或半环)系统。也就是说检测装置是闭环(半闭环)系统的重要部件之一,它的作用是测量工作实际位移并反馈送至数控装置,使工作台按规定的路径精确移动。因此对于闭环系统来说,检测装置决定了它的定位精度和加工精度。数控机床对检测装置的主要要求为: (1)工作可靠,抗干扰性强; (2)使用维护方便,适应机床的工作环境; (3)满足精度和速度的要求; (4)成本低。 通常,数控装置要求位置检测的分辨率为0.001~0.0lmm;测量精度为±0.002~±0.02mm/m,能满足数控机床以1~l0m/min的最大速度移动. 位置检测装置的分类列表于4-1中。本章仅就其中常用的检测装置(旋转变压器感应同步器光栅、磁栅、编码盘)的结构和原理予以讲述。 旋转变压器
是一种常用的转角检测元件,由于它结构简单,工作可靠,且其精度能满足一般的检测要求,因此被广泛应用在数控机床上。 工作原理 当转子绕组的磁轴与定子绕组的磁轴自垂直位置转动一角度θ时,绕组中产生的感应电势应为 E1=nV1sinθ =nV m sinωt sinθ 式中n——变压比; V1——定子的输入电压; V m——定子最大瞬时电压。 当转子转到两磁轴平行时(即θ=90o),转子绕组中感应电势最大,即 E1=nV m sinωt 旋转变压器的应用 V3=nV m sinωt sinθ1 + nV m cosωt cosθ1 =nV m cos(ωt –θ1) ?感应同步器 感应同步器是一种电磁式位置检测元件,按其结构特点一般可分为直线式和旋转式两种。直线式感应同步器由定尺和滑尺组成;旋转式感应同步器由转子和定子组成。前者用于直线位移的测量,后者用于角度位移的测量。 它们的工作原理都与旋转变压器相似。感应同步器具有检测精度高、抗干扰性强、寿命长、维护方便、成本低、工艺性好等优点,广泛应用于高精度的数控机床。本节主要以直线式感应同步器为例,对其结构特点和工作原理进行讲述。
电机驱动控制系统 摘要 由于单片机具有体积小、集成度高、运算速度快、运行可靠、应用灵活、价格低廉以及面向控制等特点,因此在工业控制、数据采集、智能仪器仪表、智能化设备和各种家用电器等领域得到广泛的应用,而且发展非常迅猛。随着单片机应用技术水平不断提高,目前单片机的应用领域已经遍及几乎所有的领域。 与交流电动机相比,直流电机结构复杂、成本高、运行维护困难,但是直流电机具有良好的调速性能、较大的启动转矩和过载能力强等许多优点,因此在许多行业仍大量应用。近年来,直流电动机的机构和控制方式都发生了很大的变化。随着计算机进入控制领域以及新型的电力电子功率元器件的不断出现,采用全控型的开关功率元件进行脉宽调制(Pulse Width Modulation,简称PWM)已成为直流电机新的调速方式。这种调速方法具有开关频率高、低速运行稳定、动态性能良好、效率高等优点,更重要的是这种控速方式很容易在单片机控制系统中实现,因此具有很好的发展前景。 本设计为单片机控制直流电机,以AT89C51单片机为核心,采用了PWM技术对电机进行控制,通过对占空比的计算达到精确调速的目的。由键盘控制电动机执行启停、速度和方向等各种功能,用红外对管测量电机的实际转速,并通过1602液晶显示出控制效果。设计上,键盘输入采用阵列式输入,用4*4的矩阵键盘形式,这样可以有效的减少对单片机I/O口的占用。
关键词:AT89C51 PWM 电机测速 一、硬件设计 1、总体设计
20 929303456781011121314151617318RFB 91112 10k 23
1918 2122232425262728 1.2.2 1602液晶显示模块 本模块实现了转速等显示功能。 D :方向;占空比;预设转速;实测速度; 1.2.3键盘模块 根据实验要求,需由按键完成对直流电机的控制功能,并经分 析得出需要16个按键,为节省I/O 口并配合软件设计,此模块使用了4*4的矩阵模式。并通过P1口与主机相连。 1.2.4 PWM 驱动电路模块设计与比较
风力发电机变桨系统 1 综述 变桨系统的所有部件都安装在轮毂上。风机正常运行时所有部件都随轮毂以一定的速度旋转。 变桨系统通过控制叶片的角度来控制风轮的转速,进而控制风机的输出功率,并能够通过空气动力制动的方式使风机安全停机。 风机的叶片(根部)通过变桨轴承与轮毂相连,每个叶片都要有自己的相对独立的电控同步的变桨驱动系统。变桨驱动系统通过一个小齿轮与变桨轴承内齿啮合联动。 风机正常运行期间,当风速超过机组额定风速时(风速在12m/s到25m/s之间时),为了控制功率输出变桨角度限定在0度到30度之间(变桨角度根据风速的变化进行自动调整),通过控制叶片的角度使风轮的转速保持恒定。任何情况引起的停机都会使叶片顺桨到90度位置(执行紧急顺桨命令时叶片会顺桨到91度限位位置)。 变桨系统有时需要由备用电池供电进行变桨操作(比如变桨系统的主电源供电失效后),因此变桨系统必须配备备用电池以确保机组发生严重故障或重大事故的情况下可以安全停机(叶片顺桨到91度限位位置)。此外还需要一个冗余限位开关(用于95度限位),在主限位开关(用于91度限位)失效时确保变桨电机的安全制动。 由于机组故障或其他原因而导致备用电源长期没有使用时,风机主控就需要检查备用电池的状态和备用电池供电变桨操作功能的正常性。 每个变桨驱动系统都配有一个绝对值编码器安装在电机的非驱动端(电机尾部),还配有一个冗余的绝对值编码器安装在叶片根部变桨轴承内齿旁,它通过一个小齿轮与变桨轴承内齿啮合联动记录变桨角度。 风机主控接收所有编码器的信号,而变桨系统只应用电机尾部编码器的信号,只有当电机尾部编码器失效时风机主控才会控制变桨系统应用冗余编码器的信号。 2 变浆系统的作用 根据风速的大小自动进行调整叶片与风向之间的夹角实现风轮对风力发电机有一个恒定转速;利用空气动力学原理可以使桨叶顺浆90°与风向平行,使风机停机。 3 主要部件组成
风力发电变桨系统 摘要:变桨系统是风力发电机的重要组成部分,本文围绕风力发电机变桨系统的构成、作用、控制逻辑、保护种类和常见故障分析等进行论述。 关键词:变桨系统;构成;作用;保护种类;故障分析 1 综述 变桨系统的所有部件都安装在轮毂上。风机正常运行时所有部件都随轮毂以一定的速度旋转。 变桨系统通过控制叶片的角度来控制风轮的转速,进而控制风机的输出功率,并能够通过空气动力制动的方式使风机安全停机。 风机的叶片(根部)通过变桨轴承与轮毂相连,每个叶片都要有自己的相对独立的电控同步的变桨驱动系统。变桨驱动系统通过一个小齿轮与变桨轴承内齿啮合联动。 风机正常运行期间,当风速超过机组额定风速时(风速在12m/s到25m/s之间时),为了控制功率输出变桨角度限定在0度到30度之间(变桨角度根据风速的变化进行自动调整),通过控制叶片的角度使风轮的转速保持恒定。任何情况引起的停机都会使叶片顺桨到90度位置(执行紧急顺桨命令时叶片会顺桨到91度限位位置)。 变桨系统有时需要由备用电池供电进行变桨操作(比如变桨系统的主电源供电失效后),因此变桨系统必须配备备用电池以确保机组发生严重故障或重大事故的情况下可以安全停机(叶片顺桨到91度限位位置)。此外还需要一个冗余限位开关(用于95度限位),在主限位开关(用于91度限位)失效时确保变桨电机的安全制动。 由于机组故障或其他原因而导致备用电源长期没有使用时,风机主控就需要检查备用电池的状态和备用电池供电变桨操作功能的正常性。 每个变桨驱动系统都配有一个绝对值编码器安装在电机的非驱动端(电机尾部),还配有一个冗余的绝对值编码器安装在叶片根部变桨轴承内齿旁,它通过一个小齿轮与变桨轴承内齿啮合联动记录变桨角度。 风机主控接收所有编码器的信号,而变桨系统只应用电机尾部编码器的信号,只有当电机尾部编码器失效时风机主控才会控制变桨系统应用冗余编码器的信号。 2 变浆系统的作用 根据风速的大小自动进行调整叶片与风向之间的夹角实现风轮对风力发电机有一个恒定转速;利用空气动力学原理可以使桨叶顺浆90°与风向平行,使风机停机。 3 主要部件组成
电机驱动控制系统 “安邦信”是中国变频器行业的一块老品牌,在技术上沉淀了二十几年,在产、学、研、市场应用的道路上积累深厚的经验。1992年3月在江苏徐州成立,1998年10月迁址深圳,更名为“深圳市安邦信电子有限公司”是第一批国家电子工业部20家变频器企业之一,专注于变频器的研发、生产和销售,快速为客户提供个性化的解决方案。 “安邦信”是国内少数同时生产高、中、低压变频器的企业,主要服务于装备制造业、节能环保、新能源三大领域,营销网络遍布全国。公司在国产品牌厂商中名列前茅,其中专用变频系列产品在多个细分行业处于业内首创或领先地位。 “安邦信”旗下的电机科技有限公司,具有30年多年专注工业电动机与汽车电机的研发、制造历史。拥有先进自动化生产线和专业检测设备,拥有资深的专业电机设计、工艺,工装设计工程师。 多年来,始终坚持“产品做精、市场做专”的经营方针。投重金搭建研发平台,精诚与多所院校建立研发联盟。获得了各种技术专利100多项,掌握了永磁同步、异步、电流开环、闭环矢量控制与485、CAN、PROFIBUS通讯的技术。完成了40V-1000V电压等级,0.4KW-8700KW功率等级产品供货能力。市场横跨电动汽车、工业控制两大行业领域,在电动汽车领域具有永磁电机、异步电机控制,40V-560V电压等级、1.5KW-250KW功率范围,风冷、水冷、油冷全系列的产品供应。当前生产的电动车电机有高效永磁同步电机,高效铜转子异步电机,高效鼠笼式异步电机三大系列。 “安邦信”制造基地根据公司的研发优势,大量采用自动化生产设备,生产设备及仪器业内领先,空间布局,生产线结构都依据国际标准设计,年产能超过15万台。 规范的流程,先进的设备,敬业的员工是安邦信制造体系的核心竞争力,严谨而人性化的生产管理实现了大规模生产效应。 电机驱动控制系统产品 “安邦信”针对市场的需求研发出电机驱动控制系统产品,形成一套驱控体系,为整车厂提供电机驱控系统解决方案,提高整车效率。其中72V,7.5KW和144V,15KW系列产品,经过市场验证,深受好评获得客户良好认可。 7.5KW和15KW电机驱动控制器系统,电机驱动控制系统具有高峰值转矩、高可靠性、低成本的特点。同时具有高效异步铜转子电机采用双冷技术,同步降低电机定转子温度,电机具有高效、高功率密度、
第四章数控机床的驱动与控制系统学 时 章节教学内容重点、难点 2 §4-1 位移、速度、位置传感器理解其应用情况 1 §4- 2 进给伺服驱动系统 4 §4-3.1 典型进给伺服系统(位置控制) ——步进式伺服系统 掌握系统的组成及工作 原理 1 §4-3. 2 闭环、半闭环进给伺服系统 第一节位移、速度、位置传感器 数控机床若按伺服系统有无检测装置进行分类,可分为开环系统和闭环(或半环)系统。也就是说检测装置是闭环(半闭环)系统的重要部件之一,它的作用是测量工作实际位移并反馈送至数控装置,使工作台按规定的路径精确移动。因此对于闭环系统来说,检测装置决定了它的定位精度和加工精度。数控机床对检测装置的主要要求为: (1)工作可靠,抗干扰性强; (2)使用维护方便,适应机床的工作环境; (3)满足精度和速度的要求; (4)成本低。 通常,数控装置要求位置检测的分辨率为0.001~0.0lmm;测量精度为±0.002~±0.02mm/m,能满足数控机床以1~l0m/min的最大速度移动. 位置检测装置的分类列表于4-1中。本章仅就其中常用的检测装置(旋转变压器感应同步器光栅、磁栅、编码盘)的结构和原理予以讲述。 旋转变压器 位置检测装置分类
是一种常用的转角检测元件,由于它结构简单,工作可靠,且其精度能满足一般的检测要求,因此被广泛应用在数控机床上。 ?工作原理 当转子绕组的磁轴与定子绕组的磁轴自垂直位置转动一角度θ时,绕组中产生的感应电势应为 E1=nV1sinθ =nV m sinωt sinθ 式中n——变压比; V1——定子的输入电压; V m——定子最大瞬时电压。 当转子转到两磁轴平行时(即θ=90o),转子绕组中感应电势最大,即 E1=nV m sinωt ?旋转变压器的应用 V3=nV m sinωt sinθ1 + nV m cosωt cosθ1 =nV m cos(ωt –θ1) ?感应同步器 感应同步器是一种电磁式位置检测元件,按其结构特点一般可分为直线式和旋转式两种。直线式感应同步器由定尺和滑尺组成;旋转式感应同步器由转子和定子组成。前者用于直线位移的测量,后者用于角度位移的测量。 它们的工作原理都与旋转变压器相似。感应同步器具有检测精度高、抗干扰性强、寿命长、维护方便、成本低、工艺性好等优点,广泛应用于高精度的数控机床。本节主要以直线式感应同步器为例,对其结构特点和工作原理进行讲述。
风力发电机电气变桨系统日常维护手册 国电南瑞科技股份有限公司 2014年1月
目录 一总则 (3) 二变桨驱动器故障代码及其解决方法 (3) 三后备电源充电器常见故障及其维护 (9) 四变桨电机常见故障及其维护 (10) 五PLC常见故障及其维护 (12)
一、总则 本手册主要针对南瑞变桨控制系统,汇总了变桨控制系统在日常运行及维护过程中可能出现的一些常见故障及相对应的解决方法,驱动器及PLC故障代码的相应信息等内容。 二、变桨驱动器故障代码及其解决方法 2.1、驱动器报“RF”故障 故障原因:主控板控制芯片(主要是 AD采样芯片)受干扰引起。 处理方法:如果有两次及以上记录则更换驱动器。 2.2、驱动器报“NH”故障(超速故障) 故障原因: (1)故障阀值设置过低; (2)电机空载; (3)测速发电机故障。 相对应处理方法: (1)重新设置超速故障阀值; (2)给电机加上负载; (3)检测测速发电机输出是否线性。 2.3、驱动器报“9L”或“9R”。 故障原因: (1)驱动功率模块坏; (2)驱动器受干扰。 处理方法: (1)首先确认驱动器功率模块是否损坏,若模块已损坏,需更换驱动器。(2)若模块没有损坏且复位后能正常运行,则更换改制后的浪涌吸收后再运行观察。功率模块( IGBT)测量方法(动力线端子):①、驱动器输入400V 断电10分钟后,用万用表二级管档测量驱动器的动力线端子红表笔对 2脚,黑表笔分别对 9和14;黑表笔对 3,红表笔分别对9和14,值都为350左右。 ②、驱动器输入400V不断电,用万用表直流档(1000V)测量驱动器的动
风力发电机变桨系统 所属分类:技术论文来源:电器工业杂志更新日期:2011-07-20 摘要:变浆系统是风力发电机的重要组成部分,本文围绕风力发电机变浆系统的构成、作用、控制逻辑、保护种类和常见故障分析等进行论述。 关键词:变桨系统;构成;作用;保护种类;故障分析 1 综述 变桨系统的所有部件都安装在轮毂上。风机正常运行时所有部件都随轮毂以一定的速度旋转。 变桨系统通过控制叶片的角度来控制风轮的转速,进而控制风机的输出功率,并能够通过空气动力制动的方式使风机安全停机。 风机的叶片(根部)通过变桨轴承与轮毂相连,每个叶片都要有自己的相对独立的电控同步的变桨驱动系统。变桨驱动系统通过一个小齿轮与变桨轴承内齿啮合联动。 风机正常运行期间,当风速超过机组额定风速时(风速在12m/s到25m/s之间时),为了控制功率输出变桨角度限定在0度到30度之间(变桨角度根据风速的变化进行自动调整),通过控制叶片的角度使风轮的转速保持恒定。任何情况引起的停机都会使叶片顺桨到90度位置(执行紧急顺桨命令时叶片会顺桨到91度限位位置)。 变桨系统有时需要由备用电池供电进行变桨操作(比如变桨系统的主电源供电失效后),因此变桨系统必须配备备用电池以确保机组发生严重故障或重大事故的情况下可以安全停机(叶片顺桨到91度限位位置)。此外还需要一个冗余限位开关(用于95度限位),在主限位开关(用于91度限位)失效时确保变桨电机的安全制动。 由于机组故障或其他原因而导致备用电源长期没有使用时,风机主控就需要检查备用电池的状态和备用电池供电变桨操作功能的正常性。 每个变桨驱动系统都配有一个绝对值编码器安装在电机的非驱动端(电机尾部),还配有一个冗余的绝对值编码器安装在叶片根部变桨轴承内齿旁,它通过一个小齿轮与变桨轴承内齿啮合联动记录变桨角度。 风机主控接收所有编码器的信号,而变桨系统只应用电机尾部编码器的信号,只有当电机尾部编码器失效时风机主控才会控制变桨系统应用冗余编码器的信号。 2 变浆系统的作用 根据风速的大小自动进行调整叶片与风向之间的夹角实现风轮对风力发电机有一个恒定转速;利用空气动力学原理可以使桨叶顺浆90°与风向平行,使风机停机。 3 主要部件组成
风力发电机组变桨控制系统的研究 发表时间:2019-04-01T17:26:18.570Z 来源:《基层建设》2019年第1期作者:吴者 [导读] 摘要:在风力发电机组中,叶轮机组已更换了固定的叶轮机组,它已成为风轮机工业发展主流的双叶轮系统。 中广核新能源华南分公司德庆风电场广东省肇庆市 摘要:在风力发电机组中,叶轮机组已更换了固定的叶轮机组,它已成为风轮机工业发展主流的双叶轮系统。它是风力发电机功率控制的一个重要组成部分,运行平稳,本文主要论述了风力发电的控制方法,本文讨论了基于进流角预报的模糊PlD统一变距功率控制系统和独立变距功率控制策略。同时对两者进行了比较,它提供了一些设计理念和理论方法来定位大型风力涡轮机的可变螺距控制系统。 关键词:变桨机构;独立变桨;优化设计;建模仿真 前言 风力发电机组主要包括两个主要部件:主控制系统和变桨控制系统。主要控制系统是控制整个风机的运行,可变叶片控制系统是专门针对不同工况下叶片的精确控制,为了实现叶片和应急桨的正常运动。一个完整的变距控制系统包括驱动和控制器的主要组成部分(一些变距控制系统只有驱动,没有控制器),变距电机,备用电源等。每一个变螺距控制系统在其结构上都有其独特的特点,为了更好地理解变螺距控制系统,我们必须对其结构有一个全面的了解。 1、课题的背景及研究目的 变叶轮机组已经取代固定叶轮机组成为风力发电机组商业化发展的主流。变量螺旋桨系统是风力发电机功率控制和执行平稳运行的重要组成部分和一个丰富的指导作用,其操作,通常情况下,可变螺旋桨系统在冯风力涡轮机控制器发出指令驱动叶片旋转,使叶片达到指定的节距角位置,不影响互联的快速实现过程,保证风电机组在不同工况下按最优参数运行;在紧急情况下,自动调节螺旋桨螺距角,使叶片跟随螺旋桨,实现气动制动,确保风力机的安全。 2、变桨系统工作原理 螺旋桨更换系统的工作原理如图1所示。机房的主处理器监控风速、转子转速和发电机驱动叶片的旋转角度。发电机能量模块计算了伺服驱动的顺序通过逻辑,驱动叶片转动。不同的叶片都有不同的可变叶轮驱动电机。驱动电机尾部装有一个编码器,编码器用以检测驱动电机的方向、转速、叶片转到的角度,反馈至变桨系统的处理器。发生系统掉电或紧急安全链触发时,备用电源(超级电容或蓄电池)进行紧急收桨,将叶片转动90°的安全位置。在急停顺桨状态下,变桨系统是在风力发电机组的主控系统之外独立工作的,这样可以避免因风力发电机组的主控系统停止工作或是错误工作而不能急停顺桨Nordex、Vestas和其他世界知名制造商都有可变间距的风力涡轮机。目前,可变螺距机制采用可变螺距风扇市场主要包括液压可变螺距机制和电动可变螺距机制,其中电动可变螺距机制分为直流电动可变螺距机制和交流电动可变螺距机制根据电动机电源的形式。 3、定桨距和变桨距风力发电机组 目前,风力发电机组的控制主要以调速为主。在功率调节,风力涡轮机可以分为固定螺距风力涡轮机和变距风力涡轮机。具有固定间距的风轮机的特点是叶片和轮套之间的连接是固定的。当风速发生变化时,叶片的迎风角不会改变,即叶片的俯仰角度无法调整。因此,定螺距风力机通常被称为失速型风力机。这种方法限制了输入功率叫做失速控制。这种情况下的失速调整基本上是相同的速度,但承受的载荷大,场出现功率与风速不匹配的情况。早期的小机组多为此结构,国内的以金风750机组占主导地位。 现在的机组都为变螺距结构,其特点为:变桨系统接收风力发电机组主控系统的指令,调节、转动风机的叶片到指定角度来实现:额定风速以下,桨叶位置保持在0度附近,最大限度捕获风能,保证空气动力效率;达到及超过额定风速时,根据主控系统的指令调节叶片角度,保证机组的输出功率。变螺距的结构输出功率稳定,可调节性能强,便于起动,机械结构受力小以及易控制变桨等安全等优点;但控制结构较复杂,容易发生变桨及其附属故障,维修工作量大。 显然,变螺距风力机具有更大的发展优势,因此,可变间距调节已成为大型风力涡轮机的最佳选择。由于变螺距控制提供了更好的输出电能质量,每个叶片调节器的独立刀片控制技术可以被视为独立的刹车系统,可以独立调整。经过调节发电机的转速,风力涡轮机的叶尖速度比可以接近最优值,为了最大程度地利用风能,提高发电机的运行效率,和操作在不同的风,风向和风速,从而增加了“网间友善”。 4、电变桨距机构 电动变螺距机构分为直流变螺距机构和交流变螺距机构。直流电机驱动装置的命名是在改变转子的时候马达驱动的动力供应模式。同样,驱动叶片旋转的电机也是由交流驱动的。Desire和SSB目前在直流电源转换机制市场上占有很大的份额。直流电动变叶轮最大的优势是在紧急情况下,电池不需要马达的伺服驱动系统直接驱动发动机,把叶片旋转至安全的地方。交流转子为电机的伺服驱动系统提供动力,伺服驱动系统控制叶片旋转至一个安全的地方。 电动变量螺旋桨系统的硬件结构如图2所示:换螺旋桨系统主要由7个机柜组成3个轴机柜,对应于换螺旋桨主机柜的3个叶片。
变桨电气培训试题 一.选择题 1.本电气图纸中,低电压穿越LVRT是什么意思 ( ) A.后备电源电压故障时,由驱动器驱动电机,保持3秒 B.主电源电压下降时,由后备电源为驱动器供电,保持3秒 C. 主电源电压下降时,由后备电源为电机供电,保持3秒 D. 驱动器故障时,由后备电源为电机供电,保持3秒 2. 温度传感器PT100中的100是指什么意思() A.测量温度为100℃时,其阻值为100ohm B.测量温度为100℃时,其阻值为0ohm C.测量温度为0℃时,其阻值为100ohm D.测量温度为25℃(常温)时,其阻值为100ohm 3.此变桨系统中,安装在电机上的编码器作用是什么()A.反馈电机的转速 B.反馈电机的电流 C.反馈电机的电压 D.反馈电机转过的角度 4.驱动器CONVERTER的作用是什么() A.把三相交流电变为直流电,再把直流电变为三相交流电,然后驱动电机B.把直流电变为三相交流电,再把三相交流电变为直流电,然后驱动电机C.把直流电变为三相交流电,然后驱动电机 D.把三相交流电变为直流电,然后驱动电机 5.轴箱电气图纸中,6A2浪涌抑制器REE70的作用是什么()A.吸收线路中的尖峰电压 B.吸收线路中的冲击电流 C.吸收线路中的高次谐波 D.吸收线路中的低次谐波 6. 此变桨系统中,电机采用的励磁方式是什么() A.并励 B.他励 C.串励 D.复励 7. 驱动器LED上显示“MS”是什么意思() A.电机过载 B.接地错误 C.缺相错误 D.低压电源错误 8.此变桨系统与主控系统之间的通讯采用什么方式()A. CAN-OPEN B. RS485 C. ETHER-NET D. PROFIBUS-DP 9. PLC模块系统中,EL3112是什么模块() A.数字量输入模块