课程设计
螺旋灌装机运动方案设计
目录
1.题目
2.设计题目及任务 (1)
2.1设计题目 (1)
2.2设计任务 (1)
3.运动方案 (2)
3.1 方案一 (2)
3.1方案二 (2)
3.3方案三 (2)
3.4 凸轮式灌装机 (4)
4.运动循环图 (4)
5.尺寸设计 (4)
5.1 蜗轮蜗杆设计 (5)
5.2 齿轮设计 (5)
5.3 传送带设计 (5)
5.4 曲柄滑块设计 (5)
5.5 平行四边形机构设计 (5)
5.6 槽轮的设计 (5)
6. 电算法与运动曲线图 (6)
6.1 曲柄滑块机构运动曲线图 (6)
6..2 平行四边形机构的运动曲线图 (6)
7.小结 (8)
7.2设计小结 (8)
8.参考数目 (8)
9.附图――方案一二机构运动简图
一、题目:旋转型灌装机运动方案设计
二、设计题目及任务
2.1设计题目
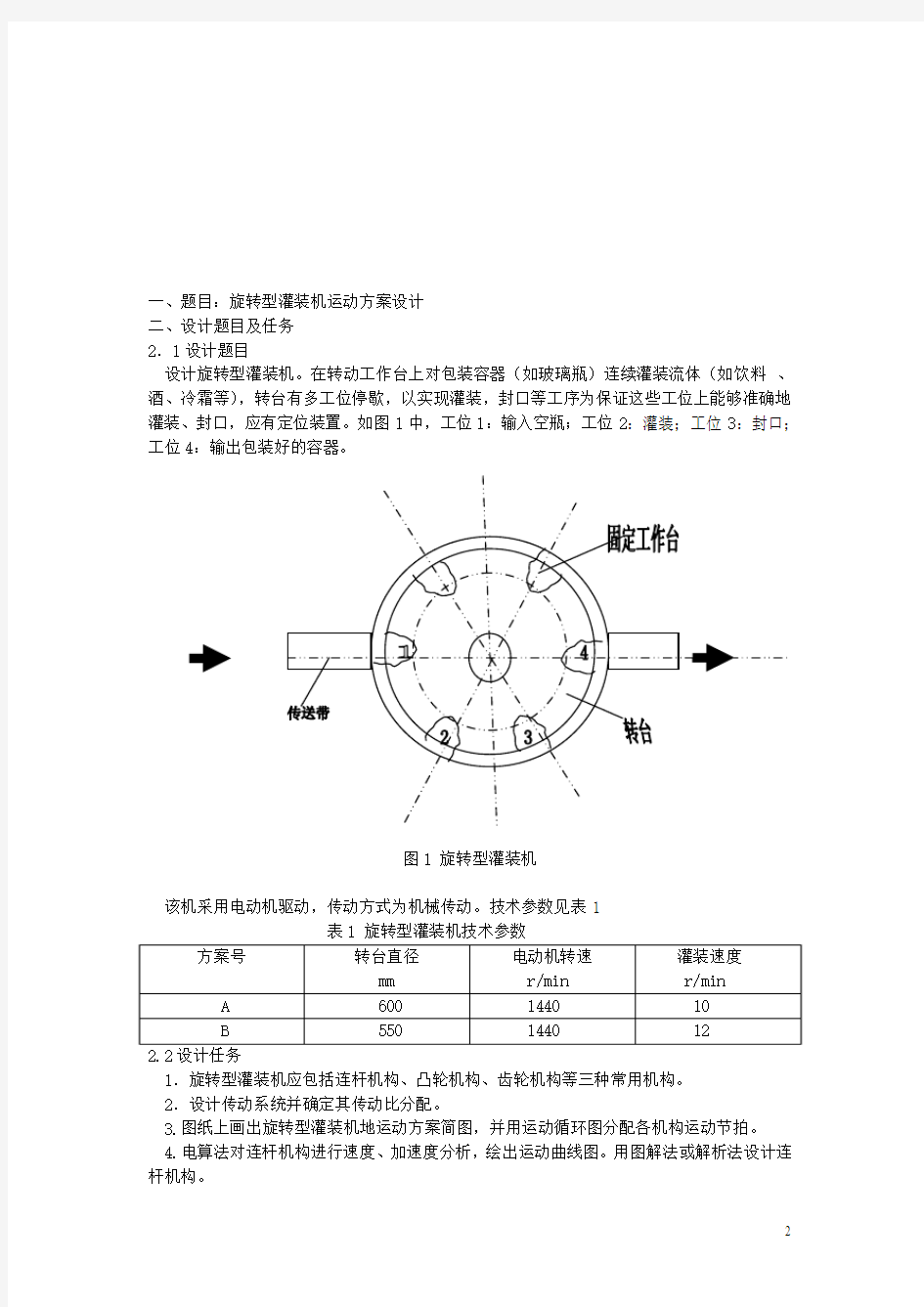
设计旋转型灌装机。在转动工作台上对包装容器(如玻璃瓶)连续灌装流体(如饮料、酒、冷霜等),转台有多工位停歇,以实现灌装,封口等工序为保证这些工位上能够准确地灌装、封口,应有定位装置。如图1中,工位1:输入空瓶;工位2:灌装;工位3:封口;工位4:输出包装好的容器。
图1 旋转型灌装机
该机采用电动机驱动,传动方式为机械传动。技术参数见表1
表1 旋转型灌装机技术参数
2.2设计任务
1.旋转型灌装机应包括连杆机构、凸轮机构、齿轮机构等三种常用机构。
2.设计传动系统并确定其传动比分配。
3.图纸上画出旋转型灌装机地运动方案简图,并用运动循环图分配各机构运动节拍。
4.电算法对连杆机构进行速度、加速度分析,绘出运动曲线图。用图解法或解析法设计连杆机构。
5.凸轮的设计计算。按凸轮机构的工作要求选择从动件的运动规律,确定基圆半径,校核最大压力角与最小曲率半径。对盘状凸轮要用电算法计算出理论廓线、实际廓线值。画出从动件运动规律线图及凸轮廓线图
6.齿轮机构的设计计算。
7.编写设计计算说明书。
8.完成计算机动态演示。
2.3 设计提示
1.采用灌装泵灌装流体,泵固定在某工位的上方。
2.采用软木塞或金属冠盖封口,它们可以由气泵吸附在压盖机构上,由压盖机构压入(或通过压盖模将瓶盖紧固在瓶口)。设计者只需设计作直线往复运动的压盖机构。压盖机构可采用移动导杆机构等平面连杆机构或凸轮机构。
3.此外,需要设计间歇传动机构,以实现工作转台的间歇传动。为保证停歇可靠,还应有定位(缩紧)机构。间歇机构可采用槽轮机构、不完全齿轮机构等。定位缩紧机构可采用凸轮机构等。
三、运动方案
3.1 方案一:(机构简图见附图)
用定轴轮系减速,由不完全齿轮实现转台的间歇性转动。此方案的优点是,标准直齿轮与不完全齿轮均便于加工。缺点:一方面,传动比过大,用定轴轮系传动时,占用的空间过大,使整个机构显得臃肿,且圆锥齿轮加工较困难;另一方面,不完全齿轮会产生较大冲击,同时只能实现间歇性转动而不能实现自我定位。
3.2 方案二:
灌装与压盖部分采用如图所示的等宽凸轮,输送部分采用如图所示的步进式传输机构。缺点:等宽凸轮处会因摩擦而磨损,从而影响精确度;步进式传输机构在输出瓶子的时候,需要一运动精度高的拨杆。
3.3 方案三:
1.如图所示,由发动机带动,经蜗杆涡轮减速;通过穿过机架的输送带输入输出瓶子;
由槽轮机构实现间歇性转动与定位;压盖灌装机构采用同步的偏置曲柄滑块机构,另外,在
压盖灌装机构中,分别设置了进料口、进盖口以及余料的出口,如上图所示。
此方案为我们最终所选择的方案。
2.优缺点分析。
优点:蜗轮蜗杆传动平衡,传动比大,使结构紧凑;传送带靠摩擦力工作,传动平稳,能缓冲吸震,噪声小;槽轮机构能实现间歇性转动且能较好地定位,便于灌装、压盖的进行。缺点:在平行四边行机构中会出现死点,在机构惯性不大时会影响运动的进行;由于机构尺寸的限制,槽轮需用另外的电动机来带动。
3.4 在设计过程中,曾考虑过用下图的凸轮机构作为压盖灌装机构,从而六个工位连续工作,以提高效率,但考虑到输送装置等各方面原因后,放弃了此方案。
四、运动循环图
以曲柄滑块机构的曲柄转过的角度为参考(与槽轮的导轮转过的角度相同)
0 60 120 150 180 240 300 360
五、尺寸设计
5.2 齿轮设计(下图所示的惰轮以及与其啮合的一对齿轮)——采用标准齿轮
5.3 传送带的设计
速度:V=wr=72r/min*50mm
每两个瓶子之间的距离S: t=S/v=1/(w1/6 ) 其中 w1为转台的角速度 12r/min
解得:S=50mm
5.4 曲柄滑块机构的计算
由机构整体尺寸,行程为137mmm ,行程速比系数K=1.4 偏心距为50mmm 具体设计过程见图解法
5.5 平行四边形机构的设计
由于已知曲柄长度为50mm,连架杆长度为706.61mm,由平行四边形定理可得出该机构的尺寸。
5.6 槽轮的设计
L=450mm Ψ=30 ∴ R=LsinΨ=225 mm s=LcosΨ=389 mm
h≥s-(L-R-r)=130mm d1≤2(L-s)=60mm d2﹤2(L-R-r)=100mm
其中 L为中心距圆销半径r=30mm d1为拨盘轴的直径 d2为槽轮轴的直径
六、电算法与运动曲线图
6.1 曲柄滑块机构运动曲线图
滑块的位移分析
滑块的速度分析
滑块的加速度分析
由上述运动曲线图知:该机构具有急回特性,由加速度曲线知,该机构冲击较小。
6.2平行四边形机构的运动曲线图
对A点进行位移、速度、加速度分析:
A点的加速度曲线
位移曲线
速度曲线
由上述曲线可以看出,平行四边形机构在运动过程中,为匀速运动,加速度会发生突变,因而存在着冲击。
七、小结
7.1方案简介
在整个系统运用到了蜗杆蜗轮机构,槽轮机构,偏置曲柄滑块机构等常用机构。完成了从瓶子的传输到灌装,压盖,最后输出的机器。
旋转型灌装机,是同时要求有圆盘的转动,曲柄滑块机构的运动和传送带的传送的机构。
圆盘间歇转动部分:因为在系统的原始要求中需要有间歇转动的特性,而工位为6个,所以在其中首先引入了可以实现间歇转动的典型机构——槽轮机构。且槽轮机构的转动速度是圆盘转速的6倍,并且在转动时分别在6个工位进行停歇。
灌装封口急回部分:灌装和风口虽然为两个工位,但其的运动特性是一样的,只是有一个时间的差值而已。而我们学过的有急回特性的最典型且简单的机构就是偏置曲柄滑块机构。
因为圆盘的转动为12r/min,而每一转有6个瓶子需要进行灌装和封口的工序,所以需要曲柄的转速也为72r/min。所以曲柄与发动机的传动比就为20:1,所以其前面的轮系传动只需要完成传动从1440r/min到72r/min的变化,所以,在这之后用了蜗杆蜗轮机构将其传动比直接变为20:1。但由于在这两个位置的方向问题,两个偏置曲柄滑块为反方向的运动。因为这样,又在两个曲柄之间添加了两对小的齿轮副,以实现其方向的转换。
7.2设计小结
在真正开始设计这个机构之前,我们曾经有过很多想法,有些很幼稚,甚至不能算是机械专业的学生设计的方案,有些又过于复杂,只能想出来,却很难实现。这次课程设计,是我们第一次将本学期《机械原理》这门课程中所学的知识综合运用到实际中,另外对于机械设计也有了初步的认识。这次课程设计,我们用了一个多月的时间,从最初的毫无头绪到逐渐做出雏形,然后进一步改进。在这整个过程中,我们在实践中摸索成长,同时也更加清晰地认识到只有认真地掌握好理论知识,在实际应用才能够得心应手。
八、参考资料
1.《机械原理》(第六版)孙桓陈作模主编高等教育出版社
2.《机械设计课程设计》(第二版)朱文坚黄平编华南理工大学出版社
3.《机械设计基础课程设计》孙德志张伟华邓子龙编科学出版社
4.《机械设计与理论》李柱国主编科学出版社
5.《机械设计课程设计》朱家诚主编合肥工业大学出版社
“工业机器人”设计大作业 作品题目:货物装卸机器人 专业:机械设计制造及其自动化 姓名:班级:学号: 姓名:班级:学号: 姓名:班级:学号: 指导教师:陈明
1 前言 货物装卸作业是指用一种设备握持工件,是指从一个加工位置移到另一个加工位置。货物装卸机器人可安装不同的末端执行器以完成各种不同形状和状态的工件货物装卸工作,大大减轻了人类繁重的体力劳动。目前世界上使用的货物装卸机器人愈10 万台,被广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛货物装卸、集装箱等的自动货物装卸。部分发达国家已制定出人工货物装卸的最大限度,超过限度的必须由货物装卸机器人来完成。装卸货物装卸是物流的功能要素之一,在物流系统中发生的频率很高 2 设计方案论证 本课题通过对货物装卸机器人工作对象及工作场所的分析研究,深入了解其工作是 如何进行,各部分零部件应该如何运行以及如何紧密配合,先确定其总体结构再对主要 零部件进行设计计算确定其尺寸大小以及确定电机型号。 2.1 基本思想 (1)设计要考虑要求和工作环境的限制。 (2)考虑到货物装卸货物时所需要精确度不是很高,为了简化结构,境地成本,采用 角铁焊接结构。 (3)为了满足设计要求,须设计三个独立的电机驱动系统,各部分之间通过计算 机控制、协调工作。 (4)本次设计只是该题目的机械部分,而对应控制部件的考虑较少。 3 仓库货物装卸机器人的设计计算 3.1 货物装载伸缩装置的设计 3.1.1 确定传动方案 我们所学的传动方式有以下几种:带传动、链传动、齿轮传动、蜗轮蜗杆传动和钢 丝绳传动等,一般地说,啮合传动传递功率的能力高于摩擦传动;蜗轮传动工作的发热 情况较为严重,因而传动的功率不宜过大;摩擦轮传动由于必须有足够的压紧力,故而 在传递同一圆周力时,其压轴力比齿轮传动的大几倍,因而不宜用于大功率传动。带传
目录 设计任务书-----------------------------------------------------2 1.功设计工作原理--------------------------------------------------4 2.能分解图,执行机构动作分解图-----------------------6 3.运动方案的选择与比较---------------------------------------9 4.机构运动总体方案图(机构运动简图)-----------------10 5.工作循环图------------------------------------------------------16 6.执行机构设计过程及尺寸计算------------------------------18 7.凸轮设计分段图.轮廓图.设计结果---------------------21 8.机构运动分析计算机辅助设计流程------------------------25 9.程序清单(主程序和子程序)------------------------------26 10.十一运行结果及运动线图------------------------------------31 11.设计总结----------------------------------------------------------32 12 参考资料----------------------------------------------------------33
江西农业大学大学机械工程学院 位3:封口;工位4:输出包装好的容器。 该机采用电动机驱动,传动方式为机械传动。技术参数见下表。 旋转型灌装机技术参数表 二、设计方案提示 1.采用灌瓶泵灌装流体,泵固定在某工位的上方。 2.采用软木塞或金属冠盖封口,它们可由气泵吸附在压盖机构上,由压盖机构压入(或通过压盖模将瓶盖紧固在)瓶口。设计者只需设计作直线往复运动的压盖机构。压盖机构可采用移动导杆机构等平面连杆机构或凸
机械原理课程设计 目录 1. 题目 2. 设计题目及任务………………………………………………………………… 2.1 设计题目……………………………………………………………………… 2.2 设计任务……………………………………………………………………… 设计方案 3.方案一…………………………………………………………………………… 3.1功能逻辑图和功能原理解图………………………………………………… 3.2工艺分解……………………………………………………………………… 3.3机械系统运动转换功能图…………………………………………………… 3.4方案总图……………………………………………………………………… 3.5运动循环图…………………………………………………………………… 4.尺寸设计………………………………………………………………………… 4.1 凸轮设计……………………………………………………………………… 4.2 槽轮设计……………………………………………………………………… 4.3 齿轮设计……………………………………………………………………… 4.4 其它机构尺寸设计………………………………………………………… 5. 方案二………………………………………………………………………… 5.1功能逻辑图和功能原理解图………………………………………………… 5.2工艺分解……………………………………………………………………… 6.机构的选择与比较……………………………………………………………… 6.1传动机构的选择与比较………………………………………………………… 6.2执行机构的选择与比较………………………………………………………… 7.小结………………………………………………………………………………
工业机器人课程设计基于Matlab的工业机器人运动学和雅克比运动分析 班级: 学号 姓名:
目录 摘要 ..................................................................................................................................................... - 2 - PUMA560机器人简介 ...................................................................................................................... - 3 - 一、PUMA560机器人的正解 .......................................................................................................... - 4 - 1.1、确定D-H 坐标系 .................................................................................................................... - 4 - 1.2、确定各连杆D-H 参数和关节变量 ........................................................................................ - 4 - 1.3、求出两杆间的位姿矩阵 ......................................................................................................... - 4 - 1.4、求末杆的位姿矩阵 ................................................................................................................. - 5 - 1.5、M A TLAB 编程求解 .................................................................................................................. - 6 - 1.6、验证 ......................................................................................................................................... - 6 - 二、PUMA560机器人的逆解 .......................................................................................................... - 7 - 2.1、求1θ ........................................................................................................................................ - 7 - 2.2、求3θ ........................................................................................................................................ - 7 - 2.3、求2θ ........................................................................................................................................ - 8 - 2.4、求4θ ........................................................................................................................................ - 9 - 2.5、求5θ ........................................................................................................................................ - 9 - 2.6、求 6 θ ...................................................................................................................................... - 10 - 2.7、解的多重性 ........................................................................................................................... - 10 - 2.8、M A TLAB 编程求解 ................................................................................................................ - 10 - 2.9、对于机器人解的分析 ........................................................................................................... - 10 - 三、机器人的雅克比矩阵 ............................................................................................................... - 11 - 3.1、定义 ....................................................................................................................................... - 11 - 3.2、雅可比矩阵的求法 ............................................................................................................... - 11 - 3.3、微分变换法求机器人的雅可比矩阵 ................................................................................... - 12 - 3.4、矢量积法求机器人的雅克比矩阵 ....................................................................................... - 13 - 3.5、M A TLAB 编程求解 ................................................................................................................ - 14 - 附录 ................................................................................................................................................... - 15 - 1、M ATLAB 程序 ........................................................................................................................... - 15 - 2、三维图 ...................................................................................................................................... - 24 -
目录 一、设计任务书.............................................. 错误!未定义书签。 二、功能分解................................................ 错误!未定义书签。 三、机构选型与组合.......................................... 错误!未定义书签。 四、机械运动循环图.......................................... 错误!未定义书签。 五、机械运动方案的拟定...................................... 错误!未定义书签。 a工作台旋转机构........................................ 错误!未定义书签。 b压盖机构.............................................. 错误!未定义书签。 c灌装机构.............................................. 错误!未定义书签。 六、原始数据................................................ 错误!未定义书签。 七、机械运动简图............................................ 错误!未定义书签。 八、各部分参数计算.......................................... 错误!未定义书签。 九、整体评价与总结.......................................... 错误!未定义书签。 十、参考资料................................................ 错误!未定义书签。附录:部分主要机构的三维模型图及构件三视图
目录1设计题目 1.1 设计条件 1.2 设计任务 1.3 设计思路 2原动机的选择 3传动比分配 4传动机构的设计 4.1 减速器的设计 4.2 第二次减速装置设计 4.3第三次减速装置设计 4.4 齿轮的设计 5方案拟定比较 5.1 综述 5.2 选择设计方案 5.3 方案确定 6机械运动循环图 7凸轮设计、计算及校核8连杆机构的设计及校核9间歇机构设计 10设计感想 11参考资料
1设计题目 设计旋转型灌装机。在转动工作台上对包装容器(如玻璃瓶)连续灌装流体(如饮料、酒、冷霜等),转台有多工位停歇,以实现灌装、封口等工序。为保证在这些工位上能够准确地灌装、封口,应有定位装置。如图8.4中,工位1:输入空瓶;工位2:灌装;工位3:封口;工位4:输出包装好的容器。 1 2 34 传送带 固定工作台 转台 1.1设计条件 该机采用电动机驱动,传动方式为机械传动 旋转型灌装机技术参数 方案号转台直径 mm 电动机转速 r/min 灌装速度 r/min A 600 1440 10 B 550 1440 12 C 500 960 15 1.2设计要求 1.旋转灌装机应包括连杆机构、凸轮机构、齿轮机构等三种常用机构。至少设计出三种能实现其运动形式要求的机构
2.设计传动系统并确定其传动比分配 3.在用A2图纸上画出旋转灌装机的运动方案简图和用运动循环图分配各机构的节拍。 4.对连杆机构进行速度和加速度的分析,绘出运动线图,用图解法或者是解析法设计平面连杆机构 5.凸轮机构的计算,按要求选择从动件运动规律,并确定基园半径,最 大压力角,最小曲率半径。对盘状凸轮要用解析法计算出理论廓线、实际廓线值。绘制从动件运动规律线图及凸轮廓线图。 6.齿轮机构的设计计算。 7.编写设计计算说明书。 .2原动机的选择 本身设计采用方案C。故采用电动机驱动,其转速为960r/min。 灌装速度为10 r/min .3传动比分配 原动机通过三次减数达到设计要求。第一次减速,通过减速器三级减速到20r/min,其传动比分别为2、6、6。第二次减速,夹紧装置,转动装置及压盖装置所需转速为10r/min,另设计一级减速,使转速达到要求,其传动比分别为2。第三次减速,传送带滚轴直径约为10cm,其转速为5r/min 即可满足要求,另设两级减速,传动比都为2即可。 .4传动机构的设计 z2=20 z3=120 z4=20 z5=120 z6=20 n=960r/min i1=2 i32=6 i54=6 n1=15r/min z6=20 z7=30 i76=1.5 n2=10r/min
目录 1工作原理 (1) 1.1设计条件 (1) 1.2设计任务 (1) 1.3设计提示 (2) 2. 方案比较 (3) 2.1选择方案 (3) 2.3方案优缺点 (5) 3. 细化设计 (6) 3.1减速器设计 (6) 3.2第二次减速装置设计 (8) 3.3第三次减速装置设计 (9) 3.4齿轮设计 (10) 3.5连杆机构设计 (11) 3.6凸轮机构设计 (12) 3.7间歇机构设计 (13) 4.总结 (14) 参考文献 (15)
1工作原理 旋转型灌装机,旋转型灌装机用于对容器连续灌装液体。转台有多工位停歇,以实现灌装、封口等程序。该机在工作过程中包括四个工位如图1;工位1,输入空瓶;工位2,灌装;工位3,封口;工位4,输出包装好的容器。该机采用灌装泵灌装流体,泵固定在某工件的上方;采用软木塞或者金属冠盖封口,他们由气泵吸附在压盖机构上,由压盖机构压入瓶口。 图1 旋转型灌装机工位示意图 1.1设计条件 该机采用电机驱动,传动采用机械传动。技术参数见表1。 表1 旋转型灌装机技术参数 方案号转台直径(mm)电动机转速(r/min)灌装速度(r/min)Ⅱ550 1440 12 1.2设计任务 1.旋转型灌装机应包括连杆机构、凸轮机构和齿轮机构这三种常用机构。 2.设计传动系统并确定其传动比分配。
3.画出旋转型灌装机的运动方案简图,并用运动循环图分配各机构运动节拍。 4.设计平面连杆机构:确定连杆机构各构件尺寸,对连杆机构进行位移、速度和加速度分析,绘制运动线图。 5.设计凸轮机构:按凸轮机构的工作要求选择从动件的运动规律,确定基圆半径,设计凸轮理论轮廓线和实际轮廓线,画出从动件运动规律线图及凸轮廓线图。 6.设计齿轮机构:根据传动比确定齿轮的齿数、模数,选择变位系数,计算齿轮传动的各部分尺寸,绘制齿轮传动啮合图。 7.编写设计计算说明书。 1.3设计提示 1.压盖机构做直线往复运动,可采用移动导杆机构等平面连杆机构或凸轮机构。 2.需要设计间歇传动机构,以实现工作台间歇传动。间歇运动可采用槽轮机构、不完全齿轮等。 3.为保证间歇停靠,还要考虑锁紧机构。锁紧机构可采用凸轮机构等。
河南机电高等专科学校《机器人应用技术》课程作品 设计说明书 作品名称:多功能机械手 专业:机电一体化技术 班级:机电124班 扣号: 姓名:流星 2014 年 10 月 1 日
目录 一课题概述 (2) 1、选题背景 (2) 2、发展现状和趋势 (3) 3、研究调研 (4) 二机械手组成及工作过程 (6) 1、整体结构分析 (6) 2、所需器材 (6) 3、底座部分 (8) 4、躯干部分 (9) 5、上臂部分 (10) 6、手爪部分 (11) 7、机械手系统的总调试 (12) 三软件部分 (13) 1、机械手软件编制流程图 (13) 2、机械手运行控制程序图 (14) 四设计体会 (15) 一课题概述 1、选题背景 随着我国经济的高速发展,各种电子产品和各种创新机械结构的出现,工业机器人的作用在装配制造业产业中的地位更加重要了。另一方面随着人们生活水平的提高传统制造产业劳动力生产成本进一
步提高,这也使企业意识到用高速准确的机械自动化生产代替传统人工操作的重要性。其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。但目前我国的工业机械手技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国机械行业自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计具有重要意义。 在这样一个大的背景下结合自己的专业机电一体化,我们选择多功能机械手来作为我们的设计题目。结合专业特点使用德国慧鱼机器人教学模型作为我们实现这一课题的元件。利用慧鱼模型的各种机械结构组装出机械手的机械部分,用pc编程实现对机械手的自动控制,利用限位开关来保护电机和控制机械手位置的准停。 这个课题可以充分的体现机电一体化的由程序自动控制机械结构的运动,对自己以前的所学的课程也是一种巩固。另一方面这个机械手可以实现一定的搬运功能具有很强的实用性能。 2、发展现状和趋势
摘要 在科学技术日益发展的今天,灌装行业越来越受到人们的关注。灌装行业的发展直接影响到液体灌装的精度,精准的灌装量不仅体现了灌装机械的发展水平,也是对消费者权益的一种保护。 本次设计的灌装机主要适应用矿泉水、果汁以及纯净水等无气液体的灌装,它具有操作简单、成本低廉及可批量生产等特点,可适用于一些中小企业的灌装生产。它的主要机构有一下几个:供料装置、供瓶装置、托瓶机构、瓶高调节装置以及灌装阀,此外,它的正常运转还需要靠传动系统的带动。它基本的设计方案是:灌装整体布局是呈立式、旋转型,由洗瓶器出来的瓶子通过传送带传送给供瓶装置,由它分瓶、送瓶给托瓶机构;灌装机的液箱内安装有灌装阀,阀头的喇叭口对准了每一个待灌瓶,液箱内的液体由供料装置供给,液体经供料装置供到液箱中,再通过灌装阀流入每一个空瓶内;待瓶灌满后,再由供瓶装置的星形拨轮拨到传送带然后传送出,运送到下一个工序。 本文从灌装机的基本理论、基本工作原理、基本工作结构以及传动部分的设计上作了阐述,并利用UG软件绘制三维图,从而更直观的反应整体效果。 关键词:灌装机;灌装阀;星形拨轮;传动装置;
Abstract Today, with the development of science and technology , the filling industry has been paid more and more attention. The development of filling industry directly affects the accuracy of liquid filling ,the filling precision not only reflects the development level of the filling machine, but also is a kind of protection of the rights and interests of consumers. The design of the filling machine is mainly adapted to use for mineral water, fruit juice and water without liquid filling of gas.It has the advantages of simple operation, low cost and mass production characteristics .The filling production can be applied to some small and medium- sized enterprises of filling production. It has some main institutions,such as feeding device, the bottle supply device, bottle table institutions, the bottle of high regulator device and the filling valve. In addition, its function also needs to be driven by the drive system.The following is its basic design scheme . Its overall mechanism is vertical and rotary. The bottle which comes from washing device conveys through the conveyor belt transmission to the bottle supply device.The device can let the bottle be separated,and then send these bottles to bottle table institutions;The liquid filling valve is installed in the cabinet, and its valve head is admitted to each bottling. The liquid in the liquid box is supplied by feeding device,and then it is delivered through the filling valve to each empty bottle. After the bottle is filled, the installation of the star dial wheel deliver -ed them to the conveyor belt and then sent to the next working procedure. This article describes the basic theory, working principle, structure and transmission part of the filling machine. The use of UG software renders 3D visual effects by drawing its 3D graph. Key words:filling machine; filling valve; star thumbwheel; transmission device
课程设计说明书 系别机电工程系 专业机械设计制造及其自动化 方向无 课程名称《机械设计(二)课程设计》 学号 06100224 姓名蔡铁根 指导教师张恩光 题目名称旋转型灌装机 设计时间 2012年9-12月 2012 年 12 月 8 日
一.设计任务书及工作要求 (3) 1.1设计题目 (3) 1.2工作原理及工艺过程 (3) 1.3原始数据及设计要求 (3) 1.4设计方案提示 (3) 1.5设计任务 (3) 二.原动机选择 (4) 三.传动比分配 (4) 四.机构的选择与比较 (4) 4.1传动机构的选择与比较 (4) 4.2执行机构的选择与比较 (6) 五.机械系统运动方案的拟订与评价 (8) 5.1 综述 (8) 5.2设计方案 (8) 5.2.1 设计方案I (8) 5.2.2 设计方案II (8) 5.2.3 设计方案III (9) 5.2.4比较、选择设计方案 (10) 六.机械系统的运动循环图 (10) 七.执行机构的运动分析及设计 (10) 7.1凸轮结构的设计分析 (10) 7.1.1凸轮机构运动分析线图 (13) 7.2曲柄滑块机构的设计分析 (14) 7.2.1连杆机构的尺寸参数设计 (14) 7.2.2曲柄滑块机构的三维模型设计 (15) 7.2.3 曲柄滑块的运动分析线图 (15) 7.3 间歇机构的设计 (16) 八.设计感想 (18) 九.主要零件附图 (18) 十.主要参考资料 (19)
1.11.2(如饮料等)封口等工序。入空瓶;工位1.3(1)转台直径:500~600mm 。 附图 (2)灌装机的生产率:10瓶/min 。 (3)驱动电机:功率N=1.2kW ,转速n=1440r/min 。 1.4设计方案提示 (1)采用泵来灌装流体,泵固定在灌装工位的上方。 (2)采用软木塞或金属冠盖封口,它们可由气泵吸附在压盖机构上,由压盖机构压入或通过压盖模将瓶盖紧固在瓶口。设计者只需设计作直线往复运动的压盖机构。压盖机构可采用移动导杆机构等平面连杆机构或凸轮机构。 (3)需要设计间歇传动机构,以实现工作转台间歇传动。为保证停歇可靠,还应有定位(锁紧)机构。间歇机构可采用槽轮机构、不完全齿轮机构等,定位锁紧)机构可采用凸轮机构等。 1.5设计任务 (1)执行机构选型与设计:构思至少三种运动方案,并在说明书中画出运动方案草图,经对所有运动方案进行分析评价之后,选择其中的最优方案进行详细设计。 (2)机构运动协调设计:对选择的方案画出机构运动循环图。 (3)传动系统的设计。
JIANGXI AGRICULTURAL UNIVERSITY 机械原理课程设计 题目:旋转型灌装机 学院: 姓名: 学号: 专业: 班级: 指导教师: 二0 一三年八月
目录 1设计题目 2旋转型灌装机的工作功能原理 3旋转型灌装机机构运动总体方案4旋转型灌装机各运动构件的设计5旋转型灌装机运动循环图 6原动机的选择 7传动机构的选择 8灌装机构的设计 9旋转工作台间隙运动机构的设计10传送轮的设计 11传动齿轮,带轮,链轮的设计12封口压盖机构的设计 13 参考文献
1.设计题目 1.1设计旋转型灌装机。在转动工作台上对包装容器(如玻璃瓶)连续灌装流体(如饮料、酒、冷霜等),转台有多工位停歇,以实现灌装、封口等工序。为保证在这些工位上 中,工位 4:输出 图4 旋转型灌装机该机采用电动机驱动,传动方式为机械传动。技术参数见表7。 表7 旋转型灌装机技术参数
1.2 1.旋转型灌装机应包括连杆机构、凸轮机构、齿轮机构等三种常用机构。 2.设计传动系统并确定其传动比分配。 3.图纸上画出旋转型灌装机的运动方案简图,并用运动循环图分配各机构运动节拍。 4.电算法对连杆机构进行速度、加速度分析,绘出运动线图。图解法或解析法设计平面连杆机构。 5.凸轮机构的设计计算。按凸轮机构的工作要求选择从动件的运动规律,确定基圆半径,校核最大压力角与最小曲率半径。对盘状凸轮要用电算法计算出理论廓线、实际廓线值。画出从动件运动规律线图及凸轮廓线图。 6.齿轮机构的设计计算。 7.编写设计计算说明书。 8.学生可进一步完成:平面连杆机构(或灌装机)的计算机动态演示等。 1.3设计提示 1.采用灌瓶泵灌装流体,泵固定在某工位的上方。
《机器人应用技术》课程作品 设计说明书 作品名称:多功能机械手 专业:机电一体化技术 班级:机电124班 2014 年10 月1 日
目录 一课题概述 (2) 1、选题背景 (2) 2、发展现状和趋势 (3) 3、研究调研 (4) 二机械手组成及工作过程 (6) 1、整体结构分析 (6) 2、所需器材 (6) 3、底座部分 (8) 4、躯干部分 (9) 5、上臂部分 (10) 6、手爪部分 (11) 7、机械手系统的总调试 (12) 三软件部分 (13) 1、机械手软件编制流程图 (13) 2、机械手运行控制程序图 (14) 四设计体会 (15)
一课题概述 1、选题背景 随着我国经济的高速发展,各种电子产品和各种创新机械结构的出现,工业机器人的作用在装配制造业产业中的地位更加重要了。另一方面随着人们生活水平的提高传统制造产业劳动力生产成本进一步提高,这也使企业意识到用高速准确的机械自动化生产代替传统人工操作的重要性。其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。但目前我国的工业机械手技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国机械行业自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计具有重要意义。 在这样一个大的背景下结合自己的专业机电一体化,我们选择多功能机械手来作为我们的设计题目。结合专业特点使用德国慧鱼机器人教学模型作为我们实现这一课题的元件。利用慧鱼模型的各种机械结构组装出机械手的机械部分,用pc编程实现对机械手的自动控制,
课程设计 题目:旋转型灌装机的设计 班级: 姓名: 指导教师: 完成日期:
一、设计题目 旋转型灌装机 二、原始资料 旋转型灌装机的传动方式,参数要求 三、上交材料 机构运动简图1份 课程设计说明书1份四、进度安排(参考) 熟悉题目,并收集相关资料 确定传动机构及设计方案,确定传动比 绘制运动机构简图及运动循环图 编写说明书 准备及答辩 五、指导教师评语 成绩: 指导教师 日期
摘要 设计旋转型灌装机。在转动工作台上对包装容器连续灌装流体,转台有多工位停歇,以实现灌装、封口等工序。为保证在这些工位上能够准确地灌装、封口,应有定位装置。我们通过连杆机构,凸轮机构及齿轮机构等3种常用机构,达到我们说要设计的要求,使我们的旋转型灌装机更合理,更实用,更经济。 通过这次的课程设计,可以把所学理论运用到实际设计当中,也充分的锻炼自己的创新能力,掌握了一些常用机构的设计方法和过程,提高了我们综合运用机械原理课程理论的能力,培养了分析和解决一般机械运动实际问题的能力,并使所学知识得到进一步巩固、深化和扩展
Abstract Design of rotary-type filler. Turning the table on a continuous filling of fluid containers, multiple-station turntable relented, and in order to achieve filling, sealing and other processes. To ensure that these public spaces can accurately filling, sealing, should be locating device. Through linkage, cam and gear mechanism such as three kinds of common institutions, to achieve our design requirements that have to make our rotating filling machine is more reasonable, more practical and more economical. Through this curriculum design, the theory can be applied to the actual designs, but also to fully exercise their a bility to innovate, to master a number of commonly used design methods and processes for agencies to improve the integrated use of mechanical principles of our ability to curriculum theory, trained to analyze and solve practical problems in general mechanical movement of the capabilities and what they have learned to be further consolidated, deepened and extended
. 学号06100224成绩 课程设计说明书 系别机电工程系 专业机械设计制造及其自动化 方向无 课程名称《机械设计(二)课程设计》 学号06100224 姓名蔡铁根 指导教师张恩光 题目名称旋转型灌装机 设计时间2012年9-12月 2012 年12 月8 日
一.设计任务书及工作要求 (3) 1.1设计题目 (3) 1.2工作原理及工艺过程 (3) 1.3原始数据及设计要求 (3) 1.4设计方案提示 (3) 1.5设计任务 (4) 二.原动机选择 (4) 三.传动比分配 (4) 四.机构的选择与比较 (4) 4.1传动机构的选择与比较 (4) 4.2执行机构的选择与比较 (6) 五.机械系统运动方案的拟订与评价 (9) 5.1 综述 (9) 5.2设计方案 (9) 5.2.1 设计方案I (9) 5.2.2 设计方案II (10) 5.2.3 设计方案III (10) 5.2.4比较、选择设计方案 (11) 六.机械系统的运动循环图 (12) 七.执行机构的运动分析及设计 (12) 7.1凸轮结构的设计分析 (12) 7.1.1凸轮机构运动分析线图 (15) 7.2曲柄滑块机构的设计分析 (16) 7.2.1连杆机构的尺寸参数设计 (16) 7.2.2曲柄滑块机构的三维模型设计 (17) 7.2.3 曲柄滑块的运动分析线图 (17) 7.3 间歇机构的设计 (19) 八.设计感想 (21) 九.主要零件附图 (22) 十.主要参考资料 (23)
1.11.2(如饮料等)封口等工序。入空瓶;工位输出灌装好的容器。 1.3原始数据及设计要求 (1)转台直径:500~600mm 。 附图 (2)灌装机的生产率:10瓶/min 。 (3)驱动电机:功率N=1.2kW ,转速n=1440r/min 。 1.4设计方案提示 (1)采用泵来灌装流体,泵固定在灌装工位的上方。 (2)采用软木塞或金属冠盖封口,它们可由气泵吸附在压盖机构上,由压盖机构压入或通过压盖模将瓶盖紧固在瓶口。设计者只需设计作直线往复运动的压盖机构。压盖机构可采用移动导杆机构等平面连杆机构或凸轮机构。 (3)需要设计间歇传动机构,以实现工作转台间歇传动。为保证停歇可靠,还应有定位(锁紧)机构。间歇机构可采用槽轮机构、不完全齿轮机构等,定位锁紧)机构可采用凸轮机构等。
河南机电高等专科学校 《机器人应用技术》课程作品 设计说明书 作品名称:多功能机械手 专业:机电一体化技术 班级:机电124班 扣号:1534542251 姓名:流星 2014 年10 月1 日
目录 一课题概述 (2) 1、选题背景 (2) 2、发展现状和趋势 (3) 3、研究调研 (4) 二机械手组成及工作过程 (6) 1、整体结构分析 (6) 2、所需器材 (6) 3、底座部分 (8) 4、躯干部分 (9) 5、上臂部分 (10) 6、手爪部分 (11) 7、机械手系统的总调试 (12) 三软件部分 (13) 1、机械手软件编制流程图 (13) 2、机械手运行控制程序图 (14) 四设计体会 (15)
一课题概述 1、选题背景 随着我国经济的高速发展,各种电子产品和各种创新机械结构的出现,工业机器人的作用在装配制造业产业中的地位更加重要了。另一方面随着人们生活水平的提高传统制造产业劳动力生产成本进一步提高,这也使企业意识到用高速准确的机械自动化生产代替传统人工操作的重要性。其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。但目前我国的工业机械手技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国机械行业自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计具有重要意义。 在这样一个大的背景下结合自己的专业机电一体化,我们选择多功能机械手来作为我们的设计题目。结合专业特点使用德国慧鱼机器人教学模型作为我们实现这一课题的元件。利用慧鱼模型的各种机械结构组装出机械手的机械部分,用pc编程实现对机械手的自动控制,