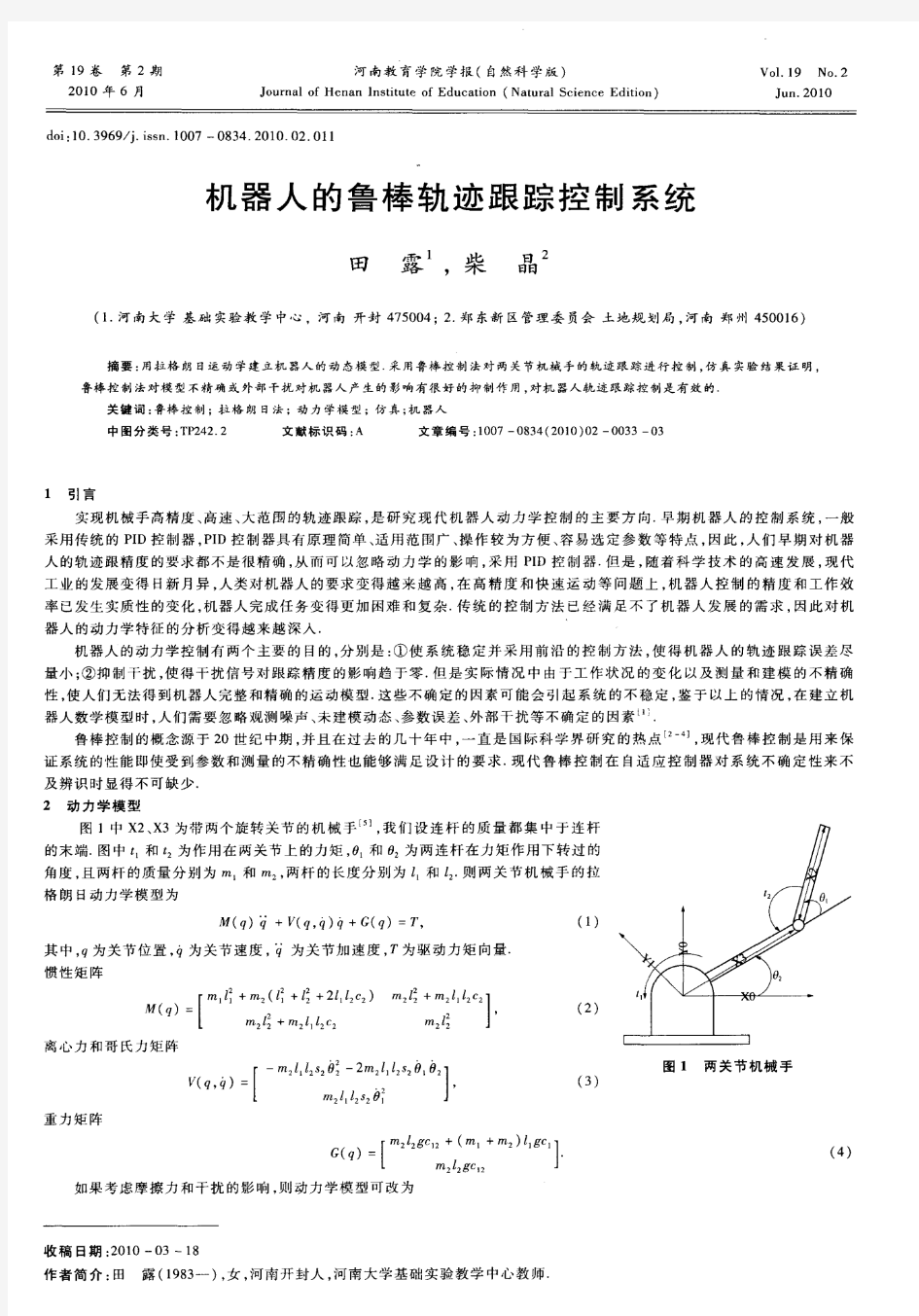
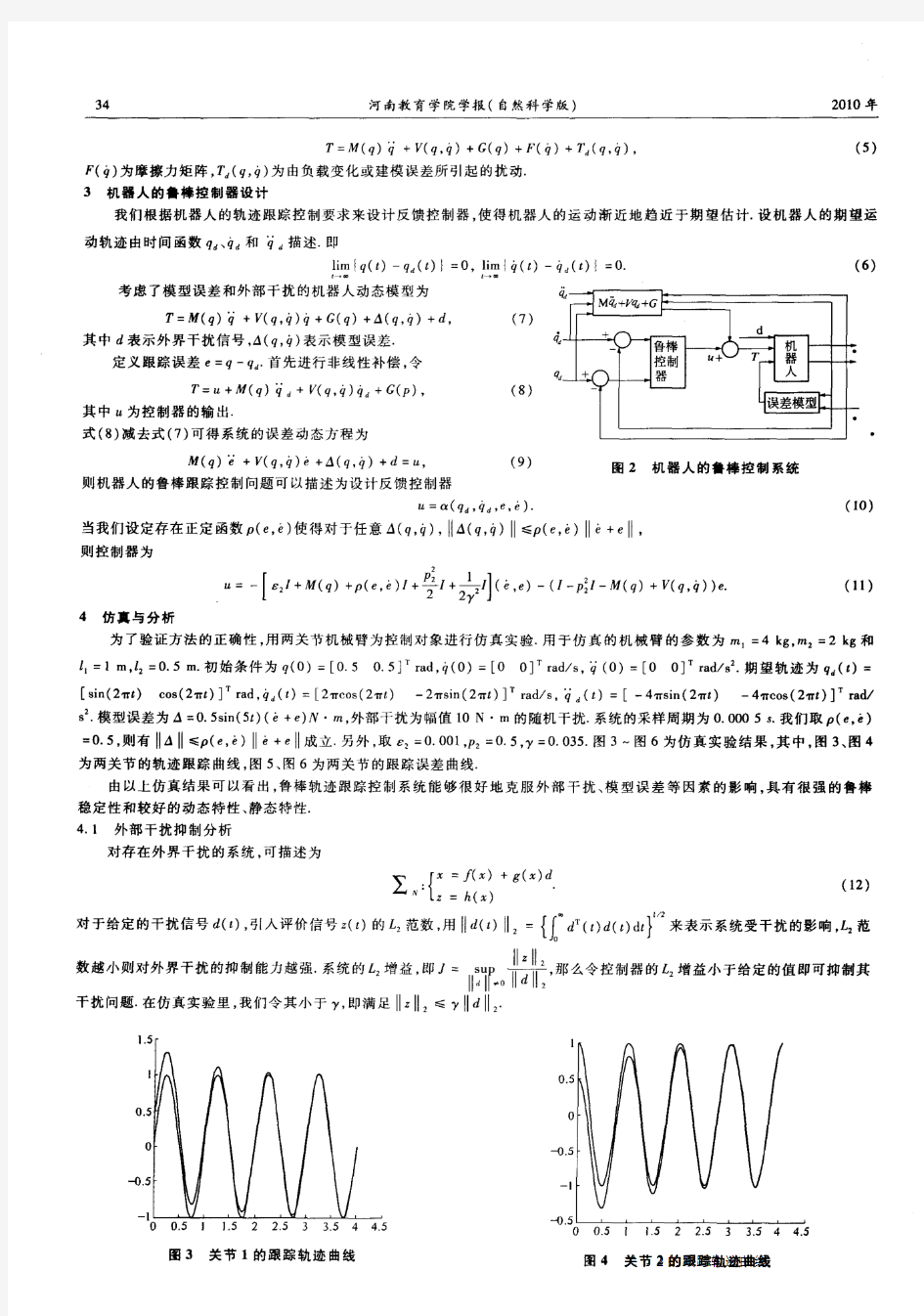
第32卷第1期 2009年1月 合肥工业大学学报 (自然科学版) J OU RNAL OF H EFEI UN IV ERSIT Y OF TECHNOLO GY Vol.32No.1 J an.2009 收稿日期:2008204221;修改日期:2008206202 基金项目;先进数控技术江苏省高校重点建设实验室基金资助项目(KX J 07127)作者简介:徐玉华(1985-),男,江西乐平人,合肥工业大学博士生; 张崇巍(1945-),男,安徽巢湖人,合肥工业大学教授,博士生导师. 基于动态滑模控制的移动机器人路径跟踪 徐玉华1, 张崇巍1, 鲍 伟1, 傅 瑶1, 汪木兰2 (1.合肥工业大学电气与自动化工程学院,安徽合肥 230009;2.南京工程学院先进数控技术江苏省高校重点实验室,江苏南京 211167) 摘 要:文章研究了室内环境下基于彩色视觉的移动机器人路径跟踪问题,利用颜色信息提取路径,简化了图像的特征提取;拟合路径参数时引入RANSAC 方法,以提高算法的可靠性;在移动机器人非线性运动学模型的基础上,设计了一阶动态滑模控制器,并通过仿真验证了控制器的有效性。关键词:移动机器人;视觉导航;路径跟踪;动态滑模 中图分类号:TP24 文献标识码:A 文章编号:100325060(2009)0120028204 Mobile robot ’s path following based on dynamic sliding mode control XU Yu 2hua 1, ZHAN G Chong 2wei 1, BAO Wei 1, FU Yao 1, WAN G Mu 2lan 2 (1.School of Electric Engineering and Automation ,Hefei University of Technology ,Hefei 230009,China ;2.Jiangsu Province College Key Laboratory of Advanced Numerical Control Technology ,Nanjing Institute of Technology ,Nanjing 211167,China ) Abstract :In t his paper ,mobile ro bot ’s pat h following in indoor environment based on color vision is st udied.Firstly ,t he image feat ures are extracted by color information so t hat t he real 2time perform 2ance of t he algorit hm is imp roved.To enhance t he ro bust ness of pat h parameter fitting ,a least square met hod based on RANSAC is adopted.Then ,a first 2order dynamic sliding mode cont roller is designed based on t he nonlinear vision 2guided robot ’s kinematics.The simulation proves t he validity of t he con 2t roller. K ey w ords :mobile robot ;visual navigation ;pat h following ;dynamic sliding mode 轮式移动机器人亦称自动引导车(A GV ),有着广泛的应用价值[1]。近年来,随着计算机技术和图像处理技术的发展,移动机器人视觉导航技术成为研究的热点[2]。视觉引导的路径跟踪是视觉导航技术之一。文献[3]基于移动机器人线性化的运动学模型,运用线性二次型最优控制理论设计最优控制器。该控制器对于较小角度的转向控制有一定的优越性,但没有讨论在较大偏差情况下的控制问题。文献[4]提出了一种模仿人工预瞄驾驶行为的移动机器人路径跟踪的模糊控制方法。而在实际应用中,模糊规则难以制定。文献[5]针对全局视觉条件下的轮式移动机器人路径跟踪问题,将基于图像的视觉伺服控制方法引 入到运动控制中,提出一种基于消除图像特征误差的跟踪控制方法。但该方法只适用于小规模环境条件下的使用。 针对以上存在的问题,本文采用价格低廉的车载彩色CCD 相机获取预先铺设引导线的路面实时图像,利用颜色信息提取路径。拟合路径参数时引入了RANSAC 方法,提高了参数拟合的鲁棒性。在移动机器人非线性运动学模型基础之上,设计了一阶动态滑模控制器(Dynamic Sliding Mode Cont roller ,简称DSMC ),在存在较大偏差的情况下也能达到良好的跟踪效果。滑模变结构控制对满足匹配条件的外界干扰和参数变化具有不变性,是一种适用于非线性系统的鲁棒控制方
运动控制系统基本架构及控制轨迹要点简述 运动控制起源于早期的伺服控制。简单地说,运动控制就是对机械运动部件的位置、速度等进行实时的控制管理,使其按照预期的运动轨迹和规定的运动参数进行运动。早期的运动控制技术主要是伴随着数控技术、机器人技术和工厂自动化技术的发展而发展的。早期的运动控制器实际上是可以独立运行的专用的控制器,往往无需另外的处理器和操作系统支持,可以独立完成运动控制功能、工艺技术要求的其他功能和人机交互功能。这类控制器可以成为独立运行的运动控制器。这类控制器主要针对专门的数控机械和其他自动化设备而设计,往往已根据应用行业的工艺要求设计了相关的功能,用户只需要按照其协议要求编写应用加工代码文件,利用RS232或者DNC方式传输到控制器,控制器即可完成相关的动作。这类控制器往往不能离开其特定的工艺要求而跨行业应用,控制器的开放性仅仅依赖于控制器的加工代码协议,用户不能根据应用要求而重组自己的运动控制系统。 运动控制的定义 运动控制(MC)是自动化的一个分支,它使用通称为伺服机构的一些设备如液压泵,线性执行机或者是电机来控制机器的位置和/或速度。运动控制在机器人和数控机床的领域内的应用要比在专用机器中的应用更复杂,因为后者运动形式更简单,通常被称为通用运动控制(GMC)。运动控制被广泛应用在包装、印刷、纺织和装配工业中。 运动控制系统的基本架构组成 一个运动控制器用以生成轨迹点(期望输出)和闭合位置反馈环。许多控制器也可以在内部闭合一个速度环。 一个驱动或放大器用以将来自运动控制器的控制信号(通常是速度或扭矩信号)转换为更高功率的电流或电压信号。更为先进的智能化驱动可以自身闭合位置环和速度环,以获得更精确的控制。 一个执行器如液压泵、气缸、线性执行机或电机用以输出运动。
三维空间连续系统的目标轨迹预见跟踪控制 廖福成,袁晓艳 (北京科技大学应用科学学院,北京 100083) 摘要:针对连续系统已知的空间目标轨迹,把基于协调误差的空间目标轨迹最优预见跟踪控制的方法应用于连续系统,其核心是将轨迹的协调跟踪误差和轨迹的位置跟踪误差考虑成系统的状态变量,并实施最优反馈控制。仿真分析表明,该轨迹跟踪控制方法能够有效提高系统的轨迹跟踪控制精度。 关键词:协调误差;最优控制;跟踪控制;预见控制 中图分类号:TP273.1 Preview Tracking Control of Object Trajectory about Continuous system Based On Harmony Error Abstract: Aim at known space object trajectory of a Continuous system, a new preview control scheme, named optimal preview tracking control of space object trajectory based on harmony error is proposed. The highlight of the method is that harmony error and position error of tracking trajectory is put into system space state equation,which to improve the system control accuracy. The simulation result shows that the method above is valid for improving the performance of high accuracy trajectory control. Key words: harmony error ,optimal control,tracking control,preview control 在离散系统的跟踪控制中,引入已知未来目标信息可以改善系统对目标信号的跟踪性能,它对解决目标轨迹跟踪运动性能起到了良好的作用。见文[1-3]。但是,已往最优预见控制都是研究的离散系统,而对连续系统的研究却很少,三维空间目标轨迹跟踪控制研究的也是离散系统,而连续系统又有自己的有点。因此本文主要讨论了基于协调误差的三维空间连续系统的目标轨迹预见跟踪控制,主要也是同时考虑轨迹跟踪协调误差和位置协调误差的轨迹跟踪最优预见控制方法,即将系统对已知空间目标轨迹的跟踪协调误差和位置协调误差同时作为其状态变量,实施其反馈最优预见控制,从而可有效提高系统对空间目标轨迹的跟踪运动性能。 1 跟踪控制系统的构成 设在空间坐标系中连续时间系统的方程为: ()()() ()(),,, i i i i i i i i x t A x t B u t y t C x t i x y z =+ ? ? == ? (1) 其中:()n i x t R ∈是状态向量,() i y t R ∈是 输出,()m i u t R ∈是控制输入向量, ,, i i i A B C分别是,,1 n n n m n ???维的常数 矩阵。 设目标值向量为() r t,() r t是分段连续 可微的函数向量,并设从当前时刻t起() rτ() t t l τ≤≤+是可预见的,() r t在,, X Y Z 轴上的分量为(),(),() x y z r t r t r t即:
燕山大学 课程设计说明书 题目:移动机器人轨迹跟踪软件设计(站点设计)学院(系):电气工程学院 年级专业: 10级过程控制二班 学号: 学生姓名: 指导教师:陈贵林李雅倩
燕山大学课程设计(论文)任务书
2013年11 月25 日
目录 前言……………………………………………………………………………第一章设计思路……………………………………………………………第二章程序…………………………………………………………… 第三章算法…………………………………………………………… 心得体会
前言 机器人的应用越来越广泛,几乎渗透到所有领域。移动机器人是机器人学中的一个重要分支。早在60年代,就已经开始了关于移动机器人的研究。关于移动机器人的研究涉及许多方面,首先,要考虑移动方式,可以是轮式的、履带式、腿式的,对于水下机器人,则是推进器。其次,必须考虑驱动器的控制,以使机器人达到期望的行为。第三,必须考虑导航或路径规划,对于后者,有更多的方面要考虑,如传感融合,特征提取,避碰及环境映射。因此,移动机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统。对移动机器人的研究,提出了许多新的或挑战性的理论与工程技术课题,引起越来越多的专家学者和工程技术人员的兴趣,更由于它在军事侦察、扫雷排险、防核化污染等危险与恶劣环境以及民用中的物料搬运上具有广阔的应用前景,使得对它的研究在世界各国受到普遍关注 关键字:移动机器人
第一章设计思路 1.1 机器人的介绍 机器人的诞生和机器人控制技术发展作为20世纪自动控制原理最具说服力的成就、人类科学技术进步的重大成果[1],是现代计算机与自动化等技术高速发展的产物,同时也是当代最高意义上的自动化。自1956年第一台工业机器人诞生之日起,机器人的应用越来越普及。20世纪60年代末机器人开始进入商业化和工业领域以来,机器人的应用范围已经遍及到工业、国防、宇宙空间、海洋开发、医疗保健、抢险救灾等人类生活的各个方面。机器人由于具有高度的灵活性、快速的反应能力以及巨大的信息处理能力,使其能够在很多环境替代人进行工作。从重复动作的流水线机械手到智能机器人,从平地到高山海底甚至太空,以至于在比较恶劣危险的工作环境,都是机器人发挥其作用的重要舞台,然而控制系统作为机器人的心脏,其性能的好坏直接决定了机器人的智能化水平。近年来对移动机器人的研究已成为了一大热点,促进了移动机器人在各个领域中的进一步应用,本文也将在这一方面进行一些分析和研究。智能移动机器人,是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。它集中了传感器技术、信息处理、电子工程、计算机工程、自动化控制工程以及人工智能等多学科的研究成果,代表机电一体化的最高成就,是目前科学技术发展最活跃的领域之一。随着机器人性能不断地完善,移动机器人的应用范围大为扩展,不仅在工业、农业、医疗、服务等行业中得到广泛的应用,而且在城市安全、国防和空间探测领域等有害与危险场合得到很好的应用。因此,移动机器人技术已经得到世界各国的普遍关注。 1.2 实训任务分配 本次的设计任务在老师的帮助下得到了细致地划分,而且也增加了一些项目,总体来说任务分为三大块:1.轨迹的识别与跟踪。2.站的设计。3.自定义轨迹的运行。这三部分的任务既是相互独立的又是相互联系的。 首先来分析第一个任务:轨迹的识别与跟踪,这个任务包含了摄像头的初始化以及图像的采集以及图像的存取,轨迹的识别用到了一个算法。机器人的控制也是这个任务包含的一个总要部分,其中包括了速度控制,方向控制等等。 第二个任务是站的设计,老师提到了“站”这个概念,这是在工厂的生产中的一些重要的机制,也是非常有实用性的一个设计。 第三个任务是自定义轨迹的运行,老师提到了可以设计一个圆形轨迹也可以设计一个方形轨迹,机器人的这种运动在生产生活中的应用也是很广泛的。
综合设计课程设计设计要求 1 设计要求 1.1 设计要求 (1)设计出逐点比较法插补软件流程图; (2)编写出逐点比较法插补程序; (3)要求用软件能够实现任意象限圆弧(G03)的插补计算; (4)要求软件能够处理特殊轮廓的插补,例如坐标中任意圆弧等; (5)插补结果要求能够以图形模拟进行输出。 2 设计目的 2.1 设计目的 (1)了解连续轨迹控制数控系统的组成原理; (2)了解逐点比较法插补的基本原理; (3)掌握逐点比较法插补的软件实现方法。 3 总体方案比较 3.1 各多种方案的特点 第一:采用逐点比较法插补。逐点比较法的基本原理是被控对象在按要求的轨迹运动时,每走一步都要与规定的轨迹进行比较,由此结果决定下一步移动的方向。逐点比较法既可以作直线插补又可以作圆弧插补。这种算法的特点是,运算直观,插补误差小于一个脉冲当量,输出脉冲均匀,而且输出买成速度变化小,调节方便,因此在两坐标数控机床中应用较为普遍 第二:数学积分法插补。又称为微分分析法。这种插补方法可实现一次、二次、甚至高次曲线的插补,也可以实现多坐标联动控制。只要输入不多的几个数据,就能加工出圆弧等形状较为复杂的轮廓曲线。作直线插补时,脉冲分配也较均匀。 第三:数据采样插补。数据采样插补实际上是一种粗插补过程,它所产生的微小线段仍然比较大,必须进一步对其密化(即精插补)。粗插补算法比较复杂,
综合设计课程设计多CPU结构CNC系统硬件原理图 大多用高级语言编制;精插补算法比较简单,多用汇编语言或硬件插补器实现。 3.2 方案选择 根据课题要求,对逆圆插补。根据两种方案的比较,都是很好的方法,但由于圆是二次,用采用逐点比较法插补进行设计比较方便、简单,所以根据各种插补方法的特点,选择用逐点比较法来实现。 4 多CPU结构CNC系统硬件原理图 4.1 CNC系统原理图 图4.1 共享总线的多CPU结构的CNC系统结构框图 4.2 原理图极其说明 共享总线机构,只有主模块有权控制系统的总线,在某一时刻只能有一个猪模块占有总线。共享总线结构的模块之间的通行,主要依靠存储器的实现,采用公共存储器的方式。共享存储器结构,采用多端口存储器来实现各CPU之间的互连和通信,每个端口配有一套数据、地址、控制线,以端口访问,由多端控制逻辑电路解决访问冲突。 管理模块:该模块是管理和组织整个CNC系统工作的模块,主要功能包括:初始化、中断管理、总线裁决、系统出错识别和处理、系统硬件与软件诊断等;插补模块:该模块用于在插补完成前,进行零件程序的译码、刀具补偿、坐标位移量计算、进给速度处理等预处理,然后进行插补计算,并给顶各坐标轴的位置
厦门海洋职业技术学院 学生课程设计 题目:逐点比较法圆弧插补的连续轨迹 控制设计 学生姓名:廖晨杰 所在院(系) 机电系 专业:数控技术 班级:数控2111 指导教师:杨光 2013年月日
目录 1.设计要求 (3) 2.设计目的 (3) 3.总体比较法 (3) 4.多CPU结构CNC系统硬件原理图 (4) 5.逐点比较法直线插补原理 (5) 6.软件构成设计 (9) 7.程序代码设计 (12) 8.参考文献 (17) 9.设计小结 (17)
1 设计要求 1.1 设计要求 (1)设计出逐点比较法插补软件流程图; (2)编写出逐点比较法插补程序; (3)要求用软件能够实现任意象限圆弧(G03)的插补计算; (4)要求软件能够处理特殊轮廓的插补,例如坐标中任意圆弧等; (5)插补结果要求能够以图形模拟进行输出。 2 设计目的 2.1 设计目的 (1)了解连续轨迹控制数控系统的组成原理; (2)了解逐点比较法插补的基本原理; (3)掌握逐点比较法插补的软件实现方法。 3 总体方案比较 3.1 各多种方案的特点 第一:采用逐点比较法插补。逐点比较法的基本原理是被控对象在按要求的轨迹运动时,每走一步都要与规定的轨迹进行比较,由此结果决定下一步移动的方向。逐点比较法既可以作直线插补又可以作圆弧插补。这种算法的特点是,运算直观,插补误差小于一个脉冲当量,输出脉冲均匀,而且输出买成速度变化小,调节方便,因此在两坐标数控机床中应用较为普遍 第二:数学积分法插补。又称为微分分析法。这种插补方法可实现一次、二次、甚至高次曲线的插补,也可以实现多坐标联动控制。只要输入不多的几个数据,就能加工出圆弧等形状较为复杂的轮廓曲线。作直线插补时,脉冲分配也较均匀。 第三:数据采样插补。数据采样插补实际上是一种粗插补过程,它所产生的微小线段仍然比较大,必须进一步对其密化(即精插补)。粗插补算法比较复杂,
连续运动轨迹插补原理文件排版存档编号:[UYTR-OUPT28-KBNTL98-UYNN208]
连续运动轨迹插补原理连续运动轨迹控制是诸如数控机床、机器人等机械的一种典型运动方式,这种控制在本质上属于位置伺服系统。以数控机床为例,其控制目标是被加工的曲线或曲面(即轮廓),所以可称之为轮廓控制。如果将被加工的轮廓作为控制器的给定输入,在运动过程中随时根据轮廓参数求解刀具的轨迹和加工的误差,并在求解的基础上决定如何动作,其计算的实时性有难以满足加工速度的需求。因此在实际工程应用中采用的方法是预先通过手工或自动编程,将刀具的连续运动轨迹分成若干段(即数控技术中的程序段),而在执行程序段的过程中实时地将这些轨迹段用指定的具有快速算法的直线、圆弧或其他标准曲线予以逼近。加工程序以被加工的轮廓为最终目标,协调刀具运动过程中各坐标上的动作。加工程序的编制必须考虑诸多约束条件,主要有加工精度、加工速度和刀具半径等。加工程序本质上就是对刀具的连续运动轨迹及其运动特性的一个描述。所以轮廓控制又可称为连续运动轨迹控制。 数控技术一般以标准的格式对程序段进行描述,例如程序段“N15 G02 Xlo Y25 120 JOF125 LF”就规定了一个以(10,25)为起点,在X-Y平面上以150mm/min 的进给速度顺时针加工一个半径为20mm的整圆的过程。程序段只提供了有限的提示性信息(例如起点、终点和插补方式等),数控装置需要在加工过程中,根据这些提示并运用一定的算法,自动地在有限坐标点之间生成一系列的中间点坐标数据,并使刀具及时地沿着这些实时发生的坐标数据运动,这个边计算边执行的逼近过程就称为插补(interpolation)。上述程序段中的准备 功能G02就指定了该程序段的执行要采用顺时针方向的圆弧插补。
万方数据
万方数据
基于PC运动控制器的多轴连续运动轨迹控制 作者:田小静, 陈煜蒙, Tian Xiaojing, Chen Yumeng 作者单位:西安航空职业技术学院,西安,710089 刊名: 价值工程 英文刊名:Value Engineering 年,卷(期):2012,31(11) 本文读者也读过(10条) 1.李松.肖金壮.王洪瑞基于X—Y平台的平面轨迹控制的研究[期刊论文]-数字技术与应用2012(1) 2.王凤爱.李成营.周杰SurfCAM 2000在四轴数控加工中的应用[期刊论文]-CAD/CAM与制造业信息化2005(2) 3.何小妹.丁洪生.付铁.孙厚芳基于PMAC的BKX-Ⅰ型变轴数控机床数据通讯及数控加工的实现[期刊论文]-组合机床与自动化加工技术2004(9) 4.杨大勇.曹凤国.Yang Dayong.Cao Fengguo电火花成形机高性能柔性化多轴联动数控系统的研究[期刊论文]-电加工与模具 2005(6) 5.尚可超基于PC的五轴联动数控系统的设计[期刊论文]-煤矿机械2001(7) 6.庞长江.陈焕章.徐旋波基于PC数控系统的开发[期刊论文]-机电工程技术2003,32(3) 7.富历新.肖蕾.董春低成本的开放型八轴运动控制器[期刊论文]-制造技术与机床2001(1) 8.谷安.刘正埙电火花成型机数控系统的研究[期刊论文]-南京航空航天大学学报2002,34(4) 9.赵东林.方凯.钱伟.郑晓锋.黄迎华.ZHAO Dong-lin.FANG Kai.QIAN Wei.ZHENG Xiao-feng.HUANG Ying-hua三轴机床数控系统软件的设计与开发[期刊论文]-组合机床与自动化加工技术2006(9) 10.何赛松.徐雷.HE Sai-song.XU Lei PLC与PC机的串行通讯在数控管切割机中的应用[期刊论文]-机械设计与制造2012(1) 本文链接:https://www.doczj.com/doc/e08730752.html,/Periodical_jzgc201211011.aspx