如何汉化X-Plane 10的用户手册和X-Plane 10飞机制造商手册
- 格式:doc
- 大小:24.50 KB
- 文档页数:1

以下是X-Plane 12 游戏的常用快捷键对照表:
通用快捷键:
Ctrl + N:新建飞机
Ctrl + O:打开飞机
Ctrl + S:保存飞机
Ctrl + Q:退出游戏
Ctrl + P:暂停游戏
Ctrl + Shift + F:切换全屏/窗口模式
Ctrl + Alt + R:重新载入当前飞机
Ctrl + Alt + D:显示FPS计数器
Ctrl + Alt + F:显示帧率计数器
Ctrl + Alt + G:显示GPU使用率
Ctrl + Alt + C:显示CPU使用率
飞行快捷键:
Ctrl + E:发动引擎
F1 - F12:显示/隐藏不同的面板(如仪表板、GPS、自动驾驶、通讯等)W/S/A/D:控制方向舵、副翼、升降舵
I/K/J/L:控制油门、航向、俯仰、横滚
Shift + W/S:增加/减小飞机的速度
Shift + A/D:左右移动前轮
Tab:切换视角(如驾驶舱、旁观等)
V:切换HUD 显示模式
Ctrl + Shift + H:隐藏/显示操纵杆
地面操作快捷键:
Ctrl + Shift + P:切换到地面操作模式
Shift + E:开启/关闭飞机的舱门
Ctrl + Shift + W/S:前进/倒车
Ctrl + Shift + A/D:向左/向右转向
Space:切换驾驶舱和旁观模式
Alt + T:显示当前飞机在地图上的位置
Alt + Shift + W/S/A/D:控制拖车行驶
以上是X-Plane 12 游戏的常用快捷键对照表,希望能对玩家们有所帮助。
1 通用航空理论▪ 1.1 飞行基础▪ 1.1.1 飞行器的飞行原理▪ 1.1.1.1 一.飞行的主要组成部分及功用▪ 1.1.1.2 二.飞机的升力和阻力▪ 1.1.1.3 三.影响升力和阻力的因素▪ 1.1.2 航空术语解释▪ 1.1.3 飞行仪表简介▪ 1.1.3.1 1. 高度表▪ 1.1.3.2 2.垂直速度表▪ 1.1.3.3 3.空速表▪ 1.1.4 目识飞行规则▪ 1.1.4.1 1.飞行分类▪ 1.1.4.2 2.目视气象条件(VMC)▪ 1.1.4.3 3.起落航线飞行的规定▪ 1.1.4.4 4.飞行安全间隔▪ 1.1.4.5 5.最低安全高度▪ 1.2 导航基础▪ 1.2.1 无线电导航原理和机载设备简介▪ 1.2.1.1 VOR/DME/NDB基本原理▪ 1.2.1.1.1 VOR▪ 1.2.1.1.2 DME▪ 1.2.1.1.3 NDB▪ 1.2.1.2 COM1和Nav1面板▪ 1.2.1.3 ADF面板▪ 1.2.1.4 应答器面板(transponder)▪ 1.2.1.5 自动驾驶仪控制面板(autopilot)▪ 1.2.1.6 GS标志▪ 1.2.1.7 下滑道指针▪ 1.2.1.8 ADF▪ 1.2.1.9 总结▪ 1.2.2 VOR导航▪ 1.2.2.1 水平位置指示仪HSI▪ 1.2.2.2 切入径向线▪ 1.2.2.3 追踪(保持)径向线▪ 1.2.2.4 核对位置▪ 1.2.2.5 到VOR台的时间和距离▪ 1.2.2.6 过台▪ 1.2.3 惯性导航▪ 1.2.4 ILS仪表着陆系统简介(盲降)▪ 1.2.5 ILS仪表着陆系统应用▪ 1.2.5.1 组成▪ 1.2.5.1.1 (1)定位器,即Localizer,缩写LOC▪ 1.2.5.1.2 (2)下滑道,即Glide Slope,缩写GS▪ 1.2.5.1.3 (3)信标,即marker beacons▪ 1.2.5.2 相关飞行技巧▪ 1.2.5.2.1 一.跟踪LOC▪ 1.2.5.2.2 二.跟踪GS▪ 1.2.5.3 与ILS有关的增补内容▪ 1.2.5.3.1 1.决断高度,Decision Height,DH▪ 1.2.5.3.2 2.反向进近Back Course Approches,BC通用航空理论飞行基础飞行器的飞行原理一.飞行的主要组成部分及功用到目前为止,除了少数特殊形式的飞机外,大多数飞机都由机翼、机身、尾翼、起落装置和动力装置五个主要部分组成:1. 机翼——机翼的主要功用是产生升力,以支持飞机在空中飞行,同时也起到一定的稳定和操作作用。
![[飞行教程] 模拟飞行10(FSX)键盘命令 供新手使用](https://uimg.taocdn.com/c9c2c97731b765ce050814e4.webp)
[飞行教程]模拟飞行10(FSX)键盘命令供新手使用FSX是让你当机长,让你开飞机的,所以你怎么开飞机就怎么玩,就这么简单。
基本操作:F1最小油门F2减小油门F3增大油门F4最大油门F5全收襟翼F6收一档襟翼F7放一档襟翼F8全放襟翼G收/放起落架。
(句号)刹车/ 打开扰流板Shift+/ 扰流板预位模拟飞行10(FSX)键盘命令请注意: 在使用数字键指令时,确定Num Lock键已经关闭模拟飞行指令(SIMULATOR COMMANDS)动作指令暂停Pause P or BREAK(BREAK)全屏模式Full Screen Mode ALT + ENTER(回车键)菜单显示/隐藏Menus (display/hide) ALTATC菜单显示/隐藏ATC Menu (display/hide) `ACCENT(`重点符号)or SCROLL LOCK (SCROLL LOCK键)膝板显示/隐藏Kneeboard (display/hide) SHIFT+F10声音开/关Sound (on/off) Q重置当前飞行Reset Current Flight CTRL+; (分号)保存飞行Save Flight ; (分号)退出飞行模拟Exit Flight SimulatorCTRL+C立即退出飞行模拟Exit Flight Simulator Immediately CTRL+BREAK (BREAK键)摇杆(禁用/使用)Joystick (on/off) CTRL+K全球坐标/帧频Cycle Coordinates/Frame Rate SHIFT+Z选择第一个Select Item 1 1选择第二个Select Item 2 2选择第三个Select Item 3 3选择第四个Select Item 4 4选择时间压缩Select Time Compression R空投物资Drop Objects SHIFT+D请求加油车Fuel Truck (request)SHIFT+F航空器标签显示/隐藏Aircraft Labels (display/hide) CTRL+SHIFT+L飞行技巧显示/隐藏Flying Tips (display/hide) CTRL+SHIFT+X增大选择Increase Selection = (等号)缓慢增大选择Increase Selection Slightly SHIFT+= (等号)缓慢减小选择Decrease Selection Slightly SHIFT+- (减号)减小选择Decrease Selection - (减号)捕获截图Capture Screenshot V登机桥廊对接/分离Jetway (attach/detach) CTRL+J结束飞行End Flight ESC飞机控制面指令(CONTROL SURFACE COMMANDS)动作指令副翼左倾斜Ailerons (bank left)数字键盘4副翼右倾斜Ailerons (bank right) 数字键盘6副翼左配平Aileron Trim (left) CTRL+数字键盘4副翼右配平Aileron Trim (right) CTRL+数字键盘6垂直尾翼左偏航Rudder (yaw left)数字键盘0垂直尾翼右偏航Rudder (yaw right) 数字键盘ENTER(回车键)垂直尾翼左配平Rudder Trim (left) CTRL+数字键盘0垂直尾翼右配平Rudder Trim (right) CTRL+数字键盘ENTER(回车键)副翼或垂直尾翼居中Center Ailerons and Rudder 数字键盘5水平升降舵向下Pitch Down (elevator)数字键盘8水平升降舵向上Pitch Up (elevator) 数字键盘2升降舵向下配平Elevator Trim Down 数字键盘7升降舵向上配平Elevator Trim Up 数字键盘1襟翼完全收起Flaps (retract fully) F5襟翼缓慢收起Flaps (retract incrementally) F6襟翼缓慢伸出Flaps (extend incrementally) F7襟翼完全伸出Flaps (extend fully) F8扰流板/减速板开/关Extend/Retract Spoilers/Airbrakes/ (正斜线)扰流板预位Arm Spoilers SHIFT+/ (正斜线)水舵收/放Water Rudder Up/Down CTRL+W发动机控制指令(ENGINE COMMANDS)动作指令对于多引擎飞机上,除非你先按下E+引擎号(1-4)选择单个引擎,否则你的操作将对所有引擎生效。
Paparazzi用户手册摘自智能控制与无人机R&D 1042-AM-01Ecole Nationale de l’Aviation Civile, Toulouse, FranceOctober 2007Updated: February 3, 2008摘要本文档是paparazzi系统快速使用指南,它分为两部分。
第一部分是一个粗略的过程,可以作为一个检查列表来使用,包括如何做飞行前的准备,如何操作无人机,和分析飞行参数。
飞行计划,预设程序,调整的过程描述。
第二部分介绍了这个系统的不同组件和工具paparazzi系统在不断的更新和完善,最新的文档你可以在项目wiki: paparazzi.enac.fr.中找到。
重要提示: 本手册编写基于特定机身 (Multiplex Microjet), 一个特定的飞行计划 (basic.xml),特定的设置, 等. 有些细节有可能和你的配置有所不同。
目录1 快速指南1.1 飞行准备 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1.2 飞场. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1.3 飞行后的分析2 参考手册2.1 Paparazzi 中心 . . . .2.2 GCS 地面控制站2.3 飞行计划 . . . . . . . 2.4 机身文件 . . . . . .2.5 设置 . . . . . . . . . 2.6 调试 . . . . . . . . . .第一章快速指南无人机操作分三部分:准备,飞行和飞参分析1.1 飞行准备飞行前的准备工作需要几个小时,特别是电池的充电时间1.1.1硬件电池需要充电的有:1.飞机2.遥控3.电脑技术细节以下检查必须每次起飞前完成:1. 检查所有固定和移动的部分。
10C中文说明书_固定翼部分目录简介 (1)销售及使用区域的限定 (2)使用、出口和改装 (2)特殊标志的意义 (2)安全飞行 (3)对10C/10CG系统的简介 (4)部件和技术特性 (7)配件 (9)发射机控制项和开关设置 (12)对镍镉电池充电 (16)操纵杆松紧度调整 (17)调整显示屏的对比度 (17)改变模式(TX SETTING) (18)省电模式 (18)CAMPac卡的初始化方法和数据转换(T9C/T9CS 到T10C): (18) 遥控设备的安装和距离检测 (19)飞行频率 (23)发射机显示屏&按键 (24)警告和错误显示 (25)固定翼机(ACRO)的功能菜单 (26)ACRO基本功能导览 (27)设置4通道固定翼的快速向导: (28)固定翼机(ACRO)的基础功能菜单 (30)MODEL子菜单 (30)参数(PARAMETER)子菜单 (33)逻辑开关选择( LQGIC SW) (38)舵机反转(SRRVO REVERSING) (38)舵机行程量的调整( END FOINT/EPA): (39) 发动机怠速控制管理 (40)双/三重比率和感度指数(D/R,EXP) (42)计时器(TIMER)菜单: (45)辅助通道功能AUX-CH: (46)教练功能TRAINER (46)微调TRIM和中立微调SUB-TRIM (48)舵机(SERVO)显示 (49)失控保护和电池低电量失控保护(F/S) (49) 固定翼机(ACRO)高级功能菜单: (50)机翼类型(固定翼机/滑翔机ACRO/GLID): (51) 襟副翼混控FLAPERON (52)襟翼—微调FLAP TRIM (53)副翼差动A1L-DIFF (54)使用5通道接收机的双副翼舵机 (54)尾翼类型 (55)升降舵副翼混控ELEVON (55)V型尾翼(V-TAIL) (57)快速横滚SNAP-ROLL (58)混控MIXS定义和类型 (59)升降舵-襟翼混控ELEV-FLAP (60)空气刹车AIRBRAKE/BUTTERFL Y(crow) (61) 油针混控THROTTLE-NEEDLE (62)油门延迟功能THR-DELAY (64)油门曲线THR-CURVE (64)线性编程混控LINER (65)曲线编程混控CURVE (67)GY A型陀螺仪混控(陀螺仪感度) (69)其它设备 (70)简介感谢您购买Futaba○R10C/10CG系列数字比例无线电遥控设备(FASST-2.4GHz*或PCM1024系统)。
FUTABA 10C航模遥控器简体中文使用说明功能篇FUTABA对控上各开关和旋钮的定义是以ABCD这些字母来命名的,从左到右,从前到后的排列。
没有严格意义上的那个开关是管哪个功能。
在功能设定的操作上使用了4个按键(旋钮),菜单键(MODE)、退出键(END)、方向键(CURSOR)、调节及**旋钮(PUSH)。
菜单键(MODE):长按后可呼出操作菜单,在菜单状态下再次按此键可进行高级菜单。
退出键(END):退出当前的选择或者菜单方向键(CURSOR):在菜单和功能之间进行选择,可向上、下、左、右拔动调节及**旋钮(PUSH):通过旋转可快速修改选中的数值和选择,向下按压时起到**的作用。
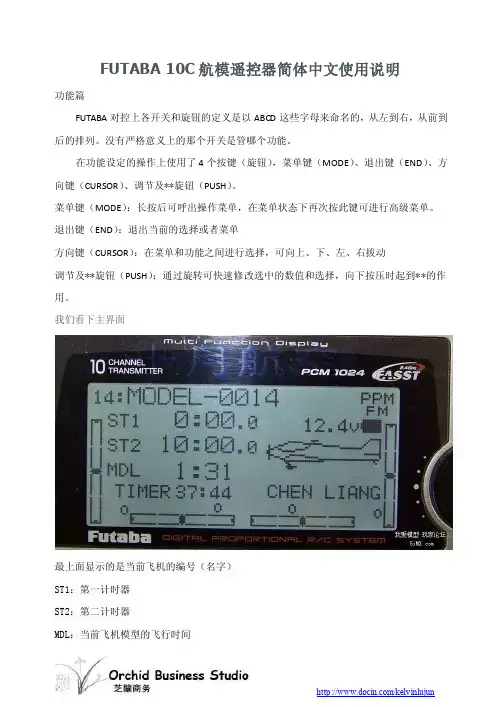
我们看下主界面最上面显示的是当前飞机的编号(名字)ST1:第一计时器ST2:第二计时器MDL:当前飞机模型的飞行时间TIMER:开机总时间以上各时间都可以在主界面通过“方向键”选择后长按“PUSH”键来进行归零清除!在主界面的右下角可设定使用者的名字如果不进行设定的话就是默认的FUTABA字样。
右主界面的右上角显示的是当前信号发射的制式“PPM”或者是“PCM”,下方还有电池的容量。
接下来将详细介绍每个功能的使用,先从固定翼开始介绍。
普通功能菜单介绍我们先**主菜单,开机后长按“MODE”会有如下界面:如下图使用“CURSOR”键进行选择并向下翻动可**普通菜单的第二页,如图:我们将普通菜单下的各功能分列并解释一下:MODEL:模型选择/数据复制/模型命名D/R,EXP:大小舵及EXP曲线END POINT:舵机行程SUB-TRIM:舵机微调(电子中立点设定)REVERSE:正反舵TRIM:微调设定及微调清除THROTTLE CUT:熄火开关设置IDEL-DOWN:油门低速混控F/S:失控保护(在PPM模式下没有此选项)AUX-CH:通道自定义PARAMETER:参数设置TIMER:计时器TRAINER:教练功能LOGIC SW:逻辑开关SERVO:通道状态显示/测试固定翼普通功能分解MODEL:模型选择/数据复制/模型命名此项有三个功能分别是:模型选择(10C在不插扩展卡的情况下可记忆15个模型数据)、模型间的数据复制、对记忆模型的命名模型选择见下图使用“CURSOR”键移动到模型数据的编号上,如上图“14”转动“PUSH”进行选择会出现下图要求长按“PUSH”的提示。
微软模拟飞行10(FSX)新手教程欧阳光明(2021.03.07)一、简单键位(本篇选择鼠标操作,在飞行中点击鼠标右键在菜单里选择)飞机姿态操作键:鼠标操控(上下控制升降舵,左右控制副翼;上下移动鼠标,飞机机鼻上升或下降;左右移动鼠标,飞机左倾斜或右倾斜。
)飞机动力操作键:F1 引擎最小马力(停止) F2 缓慢减小引擎马力(长按,停按可锁定;在地面长按启动反推力)F3 缓慢增加引擎马力(长按,停按可锁定) F4 引擎最大马力空格键刹车其它控制:F5 襟翼完全收起 F6 襟翼缓慢收起(停按可锁定)F7 襟翼缓慢放下(同F6说明) F8 襟翼完全放下G 起落架收起/放下 Shift+E 舱门打开微软模拟飞行10键盘命令请注意:在使用数字键指令时,确定Num Lock键已经关闭模拟飞行指令(SIMULATOR COMMANDS)飞机控制面指令(CONTROL SURFACE COMMANDS)发动机控制指令(ENGINE COMMANDS)通用飞机控制指令(GENERAL AIRCRAFT COMMANDS)灯光指令(LIGHT COMMANDS)无线电指令(RADIO COMMANDS)自动驾驶指令(AUTOPILOT COMMANDS)仪器仪表指令(INSTRUMENT COMMANDS)视野指令(VIEW COMMANDS)移位指令(SLEW COMMANDS)任务指令(MISSION COMMANDS)多人游戏指令(MULTIPLAYER COMMANDS)若要新增或自订键盘指令,请在菜单选项[Options],设置[Seting],控制[Controls],再按一下指定分配[Assignments],分配按键或摇杆按钮。
祝你好运,飞行员!飞机起飞前的操作第一步是打开电源,连接地面电源并打开仪表板和外部灯光。
也就是应该点亮仪表灯光和机翼灯光,这样可以让塔台和其他飞机了解你已经接通电源。
确认设置停车位刹车――这样才能从地面供电。
一、介绍ArduPilotMega 自动驾驶仪(简称APM 自驾仪)是一款非常优秀而且完全开源的自动驾驶控制器,可应用于固定翼、直升机、多旋翼、地面车辆等,同时还可以搭配多款功能强大的地面控制站使用。
地面站中可以在线升级固件、调参,使用一套全双工的无线数据传输系统在地面站与自驾仪之间建立起一条数据链,即可组成一套无人机自动控制系统,非常适合个人组建自己的无人机驾驶系统。
二、性能特点•免费的开源程序,支持多种载机。
ArduPlane 模式支持固定翼飞机,Arducoper 模式支持直升机与多旋翼(包括三轴、四轴、六轴、八轴等),ArduRover 模式支持地面车辆;•人性化的图形地面站控制软件,通过一根Micro_USB 线或者一套无线数传连接,鼠标点击操作就可以进行设置和下载程序到控制板的MCU 中,无需编程知识和下载线等其它硬件设备。
但如果你想更深入的了解APM 的代码的话,你仍旧可以使用Arduino 来手动编程下载;•地面站的任务规划器支持上百个三维航点的自主飞行设置,并且只需要通过鼠标在地图上点击操作就行;•基于强大的MAVLink 协议,支持双向遥测和实时传输命令;•多种免费地面站可选,包括Mission Planner ,HK GCS 等,还可以使用手机上的地面站软件,地面站中可实现任务规划,空中参数调整,视频显示,语音合成和查看飞行记录等;•可实现自动起飞,自动降落,航点航线飞行,自动返航等多种自驾仪性能;•完整支持Xplane 和Flight Gear 半硬件仿真三、硬件构成o核心MCU采用ATMEL的8bit ATMEGA2560o 整合三轴陀螺仪与三轴加速度的六轴MEMS传感器MPU6000 o 高度测量采用高精度数字空气压力传感器MS-5611o 板载16MB的AT45DB161D存储器o 三轴磁力计HMC5883o8路PWM控制输入o 11路模拟传感器输入o 11路PWM输出(8路电调电机+3路云台增稳)o GPS 模块可选MTK 3329及支持ublox输出的NEO-6M、7M、LEA-6H等o 可屏蔽板载PPM解码功能,外接PPM解码板或者外接PPM接收机o 可屏蔽板载罗盘通过I2C接口使用外置扩展罗盘o (可选)OSD模块,将无人机姿态、模式、速度、位置等重要数据叠加到图像上实时回传o (可选)空速传感器o (可选)电流电压传感器o (可选)超声波测距传感器o (可选)光流定点传感器o(可扩展)其它UART、I2C、SPI 设备四、硬件方框图五、飞控板概览正面图1、数传接口2、模拟传感器接口3、增稳云台输出接口4、ATMEGA2560 SPI 在线编程接口(可用于光流传感器)5、USB 接口6、遥控输入7、功能选择跳线8、GPS 接口9、I2C 外接罗盘接口10、ATMEGA32U2 SPI 在线编程接口11、多功能可配置MUX 接口(默认为OSD 输出)12、电流电压接口13、电调供电选择跳线14、电调输出接口背面图1、SPI 的MISO 电压选择2、PPM 输入选择3、MUX 接口功能选择六、硬件安装在APM 主板拿到手后,首先应明确自己的用途,并且熟悉了上述功能和接口再进行后续的硬件安装和连接。
xfoil 6.9 初级用户手册(由于时间所限,翻译后没有认真修改,错误在所难免。
请大家多多保函。
联系我:tieya123231@ 下载xfoil及相关文档/drela/Public/web/xfoil/最新升级 2001,11,30马克.雷拉, 麻省理工学院 航空航天学院Harold Youngren, 飞行器设计总体介绍xfoi是一个为设计和分析亚音速飞机独立翼型编写的互动式的程序。
它由下列执行各种函数的一系列菜单操作程序组成:-对一种已经存在的的翼型的粘流(或无粘流)分析,允许:*强制或自由转换*转捩的气泡分离*除了最大升力系数还可以对升力和阻力预测*卡门- 钱学森压缩性修正-通过屏幕指针或鼠标操作指定特定的表面速度分布,对翼型进行设计和优化设计。
两种这样的工具可以实现:*完全反设计:基于一个复杂的绘图公式;*混合反设计: 一种xfoil的基本嵌版方法(面涡法)的扩展完全反设计允许多点设计,而混合反设计则需要对翼型个部分相对严格的几何约束-通过对下列新几何参数的说明进行互动式的翼型优化设计:*新最大厚度和/或弯度*新前缘半径*新后缘厚度*通过几何说明确定新中弧线*通过载荷变化的说明确定新中弧线*副翼偏转*外部轮廓的几何(通过屏幕指针)-翼型的混合-用固定的或变化的雷诺数和/或马赫数计算阻力极线-读写翼型几何和极线并保存文件-绘制几何和压强分布图,以及极线xfoil最好在工作站上使用。
一台高端的pc机也很有效果,但是,必须运行unix来支持多窗口绘图。
Xfoil的源代码使用fortran77编写的。
这一小块图书馆业用一些c语言程序做多窗口界面。
历史-------xfoil 1.0是马克.雷拉在1986年写的。
主要的目的是把速度和高度有序的嵌版法的准确度用雷拉和盖茨发展的用于ises程序的新的全联系的粘流/非粘流互动的方法统一起来。
从为使它变得比传统的批处理型cfd程序容易开始使用一个完全互动的界面。
X-Plane飞⾏模拟资源整理⼀计划开⼀个博客整理⼀下飞⾏仿真软件⼆次开发的相关内容预计将陆续介绍、r、三个主流飞⾏模拟器。
此处为⽬录(占坑,随博客陆续更新)从本篇开始,先介绍X-Plane,主要介绍⼀下X-Plane的相关资源。
先上⼀个维基百科介绍:X-Plane是⽬前见过的仿真度最⾼的飞⾏仿真模拟软件,具体真实到什么程度呢?其Level2以上的版本通过了FAA认证,也就是说可以⽤于真实和虚拟的飞⾏训练,如果配合通过认证的硬件的话,飞⾏时间和⾥程是算在飞⾏员的飞⾏⾥程中中的,可以模拟飞⾏员真实驾驶的⼏乎所有内容,就是这么厉害。
⼀、X-Plane主要特性:1、⾃定义飞机可通过插件⾃建模型可以⾃⼰建⽴地景2、通过查表的⽅式进⾏模拟,(查表空⽓动⼒学数据,对于没有真实数据的情况是不管)3、采⽤桨叶元素理论,通过将表⾯分解成细⼩的模块,先得到提升或者是drag⼒,然后应⽤到整个飞机上。
4、⽀持⾃定义飞⾏器,飞⾏器设计软件已经集成在本软件中了5、可以通过UDP进⾏通信,实现数据的读取和控制命令的发送6、可以通过第三⽅的⼯具修改地图和场景的3D模型7、⽀持遥感检测,⽀持精确的gps数据。
允许商业应⽤8、有个开发商⽀持硬件,如⽀持标准的摇杆拉杆脚踏板等⼆、X-Plane的下载/的⽹页最下⾯友情链接⾥⾯也有X-Plane的论坛中也可以下载/index.php?app=downloads&showfile=9146如果购买普通版,时间不紧张的情况下,建议购买DVD版,省去了下载⼤量地景的⿇烦(国内⽹速你懂的),另外如果不⽤DVD版,每次程序运⾏都会通过⽹络监测序列号的状态,当⽹速⽐较慢,或者⽹络时断时续的时候是会令⼈抓狂的。
我曾经因为下载地景太慢,⽤了两次VPN,结果官⽅监测到序列号在多个地⽅跳来跳去,直接封了。
后来通过与官⽅客服发邮件沟通,才重新放开。
如果买Pro版,就⽅便了,在电脑上装上软件,只要插着U key就能⽤了。
xplane11教程X-Plane 11教程:安装和启动1. 下载X-Plane 11前往官方网站或授权的数字发行平台下载X-Plane 11安装程序。
确保选择适用于您的操作系统的版本。
2. 安装X-Plane 11双击安装程序并按照提示进行安装。
选择您希望安装的目标文件夹,并等待安装程序完成。
3. 启动X-Plane 11找到X-Plane 11的安装文件夹,通常位于您的计算机的“应用程序”(Mac)或“程序文件”(Windows)目录中。
双击启动X-Plane 11。
4. 配置设置在第一次启动X-Plane 11时,您将被要求设置一些基本参数。
这包括语言选择、音频设置、图形设置和控制器设置。
根据您的喜好进行配置。
5. 选择飞行器在载入主界面后,您可以选择您希望驾驶的飞机类型。
X-Plane 11提供了多种飞机模型供您选择,包括民用飞机、军用飞机和直升机。
点击您喜欢的飞机模型以进入飞行准备阶段。
6. 飞行准备在飞行准备阶段,您可以选择飞行场景、天气条件和飞行计划。
您可以从世界各地的不同机场起飞,并根据自己的喜好调整天气和飞行计划。
7. 开始飞行一切准备就绪后,您可以点击“开始飞行”以进入X-Plane11的真实飞行体验。
您将操纵飞机进行起飞、飞行和降落操作。
尽情享受飞行的乐趣吧!这是一个简要的X-Plane 11安装和启动教程。
随着您的熟悉度增加,您可以进一步探索X-Plane 11中更丰富的功能,例如高级飞行模式、模拟飞行仪表和多人在线飞行等。
祝您飞行愉快!。
微软模拟飞行x教程介绍Esc终止任务或停止track回放Ctrl - Q 在track回放中控制战机Shift - Backspace(退格键)重置track 编辑(取消所有前面的编辑命令)Alt - Backspace 编辑插入模式(不取消前面的编辑命令)Ctrl - S 声音开/关Ctrl - 0 在任务录像中打开麦克风开始录音Shift - 0 在任务录像中关闭麦克风结束录音Alt - 0 开始或停止录像在指针所在位置Ctrl - 9 在任务录像中开始录入字幕Shift - 9 在任务录像中停止录入字幕Ctrl - A 加快速度Alt - A 减慢速度Shift - A 重置为正常速度S 暂停/继续/开始Ctrl - M 在多人联机时聊天Shift - Return 在多人联机时复活Alt - J 跳进所选AI战机座舱或离开当前战机座舱Ctrl - Backspace 显示帧数Ctrl - O 在暂停模式中保存一个回放点到track(未实现)Alt - O 返回到上一个回放点(未实现)Shift - O 跃至下一个回放点(未实现)print Screen 截图(以0、1、2、3……编号顺序保存在ScreenShots文件夹)飞行控制Down Arro 抬高机头Up Arro 压低机头Left Arro 向左侧滚Right Arro 向右侧滚Ctrl - . (句号) 向上配平Ctrl - ; (分号) 向下配平Ctrl - , (逗号) 向左侧滚配平Ctrl - / (斜杠) 向右侧滚配平Z 左舵(飞行时),左转(滑行时)X 右舵(飞行时),右转(滑行时)Ctrl - Z 左舵配平Ctrl - X 右舵配平H 高度稳定模式开/关Shift - M 重置当前警告声Ctrl - L 机载灯光开/关Alt - V 自己的战机无敌模式(在联机和加密任务中不起作用)K 解除仰角限制(执行“普加乔夫眼镜蛇机动”)U 使自己的战机进入起飞位置(在航母上)Ctrl - T 取消配平Alt - H 向AWACS请求基地机场的方位和距离Alt - T 向AWACS请求加油机的方位和距离Shift - (加号) 增加高度表基本气压Shift - - (减号) 减少高度表基本气压Shift - p 电源开关Alt - p 自动螺旋恢复(按住从螺旋状态中恢复)Alt - S 速度保持模式Alt - E 容易降落模式油门控制J 自动油门模式page Up 快速的加大油门page Don 快速的减少油门Key pad (加号) 平稳的加大油门Key pad - (减号) 平稳的减少油门Home 启动引擎End 关闭引擎油门控制命令与Alt组合使用只控制左引擎油门控制命令与Shift组合使用只控制右引擎机械系统控制B 减速板收/放Shift - B 打开减速板Ctrl - B 收起减速板Ctrl - E 弹射E 雷达干扰开/关(要求外挂电子对抗吊舱)F 襟翼收放开/关Shift - F 放下襟翼Ctrl - F 收起襟翼G 起落架收放开/关Ctrl - G 着舰勾收放开/关(注意:只对Su-33有效)Ctrl - C 座舱开/关p 释放阻力伞Ctrl - p 机翼折叠开/关(注意:只对Su-33有效)Ctrl - R 放油(在空中), 加油(在地面)(注意:要按住键)Alt - R 抛弃副油箱W 机轮刹车(只在地面有效)(注意:要按住键)T 翼尖拉烟开/关R 空中受油管伸缩开/关Alt - L 起落架灯近光/远光/关模式导航模式~ (波浪号) 选择下一个导航点或机场A 自动驾驶开关。
•软件指 令暂停P or Break ( Break )全屏模 式Alt+Enter (回 车键 )菜单显 示/隐 藏AltATC 菜单显 示/隐藏`(重 点符号 )or Scroll Lock (Scroll Lock 键)膝板显 示/隐 藏Shift+F10声音开 /关Q重置当 前飞行Ctrl+; (分 号)保存飞 行t ; (分号 )退出飞 行模拟r Ctrl+C立即退 出飞行 模拟Ctrl+Break (Break 键 )摇杆( 禁用/使用 )Ctrl+K 全球坐 标/帧 频Shift+Z 选择第 一个1选择第 二个2选择第 三个3选择第 四个4选择时 间压缩R 空投物 资Shift+D 请求加 油车Shift+F 航空器 标签显 示/隐藏Ctrl+Shift+L 飞行技 巧显示 /隐 藏Ctrl+Shift+X 增大选 择#NAME?缓慢增 大选择Shift+= (等 号)缓慢减 小选择Shift+- (减号 )减小选 择- (减号 )捕获截 图V 登机桥 廊对接 /分 离Ctrl+J 结束飞 行ESC•控制指 令副翼左 倾斜数字键 盘4副翼右 倾斜数字键 盘6微软模 拟飞行 10(FSX ) 键盘操 作手 册飞行模 拟10(FSX)键盘 命令 (请 注意 : 在使 用数字 键指 令时, 确定 NumLock 键 已经 关闭 )副翼左 配平Ctrl+数字 键盘4副翼右 配平Ctrl+数字 键盘6垂直尾 翼 左偏 航数字键 盘0垂直尾 翼 右偏 航数字键 盘Enter ( 回车键)垂直尾 翼 左配 平Ctrl+数字 键盘0垂直尾 翼 右配 平Ctrl+数字 键盘Enter (回车 键)副翼或 垂直尾 翼居 中数字键 盘5水平升 降舵向 下数字键 盘8水平升 降舵向 上数字键 盘2升降舵 向 下配 平数字键 盘7升降舵 向 上配 平数字键 盘1襟翼完 全收起F5襟翼缓 慢收起F6襟翼缓 慢伸出F7襟翼完 全伸出F8扰流板 /减速 板开 /关/ (斜杠 )扰流板 预位Shift+/ (斜 杠)水舵收 /放Ctrl+W•发动机 控制指 令选择引 擎E+引擎 编号 (1-4)选择所 有引擎E+1+2+3+4自动启 动引擎Ctrl+E 切断节 流阀 (节流 阀就 是油门 )F1反冲力 (涡 扇发动 机/喷气发 动机 )F2 (按 住且 保持 )降低节 流阀F2 or 数字 键盘3增加节 流阀F3 or 数字 键盘9节流阀 最大F4螺旋桨 低转速Ctrl+F1降低螺 旋桨转 速Ctrl+F2增大螺 旋桨转 速Ctrl+F3螺旋桨 高转速Ctrl+F4油气混 合比设 置为 慢车 低油状 态Ctrl+Shift+F1对于多 引擎飞 机上,除非 你先按 下E+引擎 号(1-4)选 择单 个引 擎,否 则你的 操作将 对所 有引 擎要恢复 对所有 引擎 的控 制,先 按住E ,然 后快速 连续 地按 下所有 引 擎号(E, 1, 2,¼等等 ) 生效 。
一、冷舱启动1. 接通地面电源2. 打开飞机电源3.NAV航行灯打开(ON位置)3. 设置惯导(NAV位置)4. 备用电源(AUTO位置)准备工作结束,先设置FMC。
二、设置FMC1.先按(左1)进入标识页2.按(右6)进入起飞机场设置3. 输入起飞机场代码点击(左2)确认,然后点击(右6)4. 进入机场航路设置页面设置目的地机场、起飞跑道、航班号、航路文件,最后按(EXEC)确认航路。
5. 按INIT REF进入设置页面6.先按(左1),然后(左3)数据就会自动出来。
7. 左4:备用油料(图内为10吨)左5:经济指数(图内为100,数字越高速度越快越耗油)8. 右1:输入巡航高度(飞30000英尺就输入300然后点右1按钮),然后点击(右6)进入下一页飞机加油9.再点击(右6)进入下一页设置。
左3和左4是减推力起飞设置(如有需要可以设置)10.设置起飞襟翼角度(左1),输入好后V1/VR/V2数据自动出现,然后按(右1、右2、右3)把自动出现的数据填进去。
11.调整安定面配平面数值到5.0三、启动APU 引擎点火1. 启动APU旋钮打到START后自动跳回ON位置2. 点击APU GEN1切换APU供电(按钮显示AVAIL即可点击),点击后显示ON接通。
3.APU引气打开(顶板右下方)4.APU引气上方这五个开关打开(黄灯点掉)6. 偏航阻尼打开(顶板右上方)7. 四个液压旋钮打到AUTO8. 这是油门油泵相关开关全部打开(黄灯点掉)9. 风挡加温打开10. 防撞灯打开11. 这四个开关打开12. 打开发动机启动开关(顺序4/3/2/1)当对应发动机引气到25时接通点火开关13. 接通对应发动机点火开关14. 打开供气系统15. 打开液压,引擎动力16. 滑行灯、跑道灯打开17. 机翼防冰系统打开(5个开关)18. 飞行指引打开,自动油门预位19. 调整修正海压20. 放襟翼到设置角度21.接通LNAV和VNAV(可以开始滑行进入跑道了)21. 滑行的时候把自动刹车打到RTO22.点击DEP ARR进入进、离场程序设置页面(左1 DEP起飞机场离场程序设置,右2目的地机场进场程序设置)22. 上跑道后打开着陆灯和其他所有灯24. 防撞系统打到TA/RA26. 起飞27. 起飞后抬轮28. 接通自动驾驶起飞结束下面开始降落教程四、降落设置(到下高点)1.设置FMC,点击INIT REF进入下面这个页面,点击(右2)复制降落襟翼角度和速度,再点击(右4)粘贴3. 可点击LOC截获盲降信号,然后再点击APP进行自动降落4. 也可以直接点击APP让飞机自动降落5.LOC和G/S变绿表示成功截获下滑道。
如何汉化X-Plane 10的用户手册和X-Plane 10飞机制造商手册
将X-Plane 10的用户手册和X-Plane 10飞机制造商手册翻译成中文很简单。
在网站的“Support”页面中可以找到这两个文件。
此外,界面菜单“menu”翻译成中文也很方便。
在“X-Plane 10”这个主文件夹里可以找到语言文件:点击“Resources”文件夹,然后点击“Text”文件夹。
“Text”语言文件夹和“menus”菜单文件夹正好都在“Resources”文件夹里。
翻译完成后,如果你的x-plane 10汉化得不完全或有显示错误,这可能是您的电脑里没有加载正确的字体库造成的。
可能的解决办法是:
第一步,先利用到windows自带的字库翻译。
第二步,打开x-plane 10安装目录里的“Resources”文件夹,双击打开其中的“fonts”文件夹,把里面的“DejaVuSans.ttf”和“DejaVuSansMono.ttf”两个字体文件删掉。
第三步,打开控制面板里的字体,选一种你想要的字体,复制两份到桌面,分别重命名为DejaVuSans和DejaVuSansMono,然后将它们复制到“fonts”文件夹中。
第四步,运行x-plane 10,在setting菜单里将语言选择为日文。
如果还没成功,那就只好用适当的日文字体试一试了。