SHIP ENGINEERING 船舶工程
V ol.36 No.1 2014 总第36卷,2014年第1期船-舵-桨的水动力干扰效应研究
侯建军,石爱国,吴 明,杨 波
(海军大连舰艇学院航海系,辽宁大连 116018)
摘 要:基于计算流体力学方法,结合滑移网格技术与动网格技术,实现了带自由面的双桨双舵舰船的直航与斜拖的数值模拟试验,并根据数值模拟所得到的若干数据求取了桨的实效伴流系数、流入舵的纵向有效速度与有效冲角、操舵诱导横向力关于舵力的修正因子及其距舰船重心的无量纲距离等船、舵、桨相互干扰系数。数值模拟结果与权威水池试验结果相比对,吻合良好。
关键词:舰船;螺旋桨;舵;干扰;计算流体力学
中图分类号:U661.1 文献标志码:A 文章编号:1000-6982 (2014) 01-0041-04
Research on Hydrodynamic Interference Effect between
Hull Rudder and Propeller
HOU Jian-jun, SHI Ai-guo, WU Ming, Y ANG Bo
(Navigation Dept., Dalian Naval Academy, Liaoning Dalian 116018, China)
Abstract: Based on Computational Fluid Dynamics method, the sliding mesh and dynamic mesh method is adopted to simulate straight line and oblique towing test of ship with twin propellers and twin rudders. And according to the simulation results, the interference coefficients, such as effective weak field coefficient, rudder’s effective longitudinal velocity and effective attack angle and rudder force’s modificatory factor for ship handling derivational transverse force and its dimensionless distance to ship’s gravity point, are calculated. The numerical simulation results show good agreement with the corresponding tank test.
Key words:warship; propeller; rudder; interference; computational fluid dynamics(CFD)
自MMG方程提出以来,国内外许多学者对船、舵、桨间相互干扰问题展开了大量的研究。日本广岛大学的小濑邦治、芳村康男[1]等在1985年提出了船后舵力的基本表达式,并根据大量水池试验结果提出了对敞水舵力的干扰系数修正方法。日本造船技术研究所的松本憲洋、平野雅祥[2]80年代末提出了船、舵间干扰系数的水池试验确定方法。海军工程大学的范尚雍、程智斌[3]等在高速双桨双舵舰船的船、舵、桨干扰方面,作了系列试验和理论分析。大连海事大学的贾欣乐、杨盐生[4]在90年代初应用系统辨识的方法,确定了船/舵间干扰的主要因素(干扰系数),并分析了干扰系数与船型参数间的关系。
船、舵、桨之间相互干扰效应的问题十分复杂,至今尚不能准确地用理论计算的方法预报其对船体周围流场的影响。CFD方法由于其具有较好的对流场整体及细节的表现能力和日益提高的计算精度,且较少受试验条件的限制等优势,被越来越多地应用于船体流场的相关研究。2007年,哈尔滨工程大学的黄胜教授[5]、苏玉民[6]教授等采用CFD方法就桨后流场及船尾部伴流场进行了数值分析,并就桨、舵间干扰展开了讨论。这些研究多为从造船角度出发,关注对螺旋桨、舵等进行工程设计,而对于船舶操纵性的船、舵、桨间干扰问题,关注较少,有待进一步研究。
本文基于RANS方程,结合滑移网格技术与动网格技术,实现了两相流中有自由面的双桨双舵舰船的直航与斜拖的数值模拟试验。数值试验中分别在船、舵、桨单一作用的流场叠加干扰效应来求取相应的水动力,通过五组数值试验结果,推导出桨的实效伴流系数ωp、流入舵的纵向有效速度u R与有效冲角αR、操舵诱导横向力关于舵力的修正因子αH及其距舰船重心的无量纲距离x H等干扰系数,最后对数值计算结果和流场进行了分析及验证,证实本文采用的CFD技
收稿日期:2013-07-15;修回日期:2013-09-14
作者简介:侯建军(1973-),男,高工,博士。研究方向:舰船耐波性,舰船计算流体力学。
船舶机械
术研究复杂的船-舵-桨干扰效应的可行性。
1 船-舵-桨干扰试验的数值模拟方法 1.1 研究思路与数学模型 1.1.1 研究思路
目前处理船-舵-桨干扰这一复杂问题的优化方法,是分别在船、舵、桨单一作用的流场叠加干扰效应来求取相应的水动力,即分别讨论船与舵、船与桨、桨与舵的相互干扰。基于上述方法,本文对船模在双桨转动情况下的直航试验及斜拖试验进行数值模拟,并基于数值模拟结果求取相应的干扰系数,再将所得结果与权威水池试验结果进行比较分析,以检验本文采用的CFD 方法研究船-舵-桨干扰效应的可行性。 1.1.2 数学模型
对于船-舵-桨干扰问题,将船尾流场视为不可压缩粘性流体,于是其控制方程有连续性方程和动量方程(Navier-Stokes 方程)为:
()0i i
u t x ρρ??+=?? (1) ()()i j i j j i i i j
j i
u u u t x u u P f x x x x ρρμρ??+????
??????=?+
++????????????????
(2)
式中:u i 、u j 为流体速度矢量u K
在x i 、x j 方向的分量;t 为时间;P 为压力;ρ为流体密度;f i 为质量力;μ为流体动力粘性系数。 1.2 试验设计 1.2.1 试验方案
共进行5组试验,具体设置如表1所示。表中,ωp 为桨的实效伴流系数;u R 和αR 分别为流入舵的纵向有效速度和有效冲角;αH 和x H 分别为操舵诱导横向力关于舵力的修正因子和作用中心距舰船重心的距离;δ0和δR 分别为直航和斜拖时的零法向力舵角。
表1 试验方案
编 号 试验 方式 漂角/(°) 舵角/(°) 获取的 相关参数 1 斜拖
6、10、14、 16、20
ωp 2 直航 0 11、16、28
ωp 、u R 、αR 、αH 、x H
3 斜拖 -8、-12 -11
u R 、αR 、
αH 、x H 4 直航 0
-5~5 直航时δ0
5 斜拖 -8
、-12 -11~0 斜拖时δR
1.2.2 计算域及网格划分
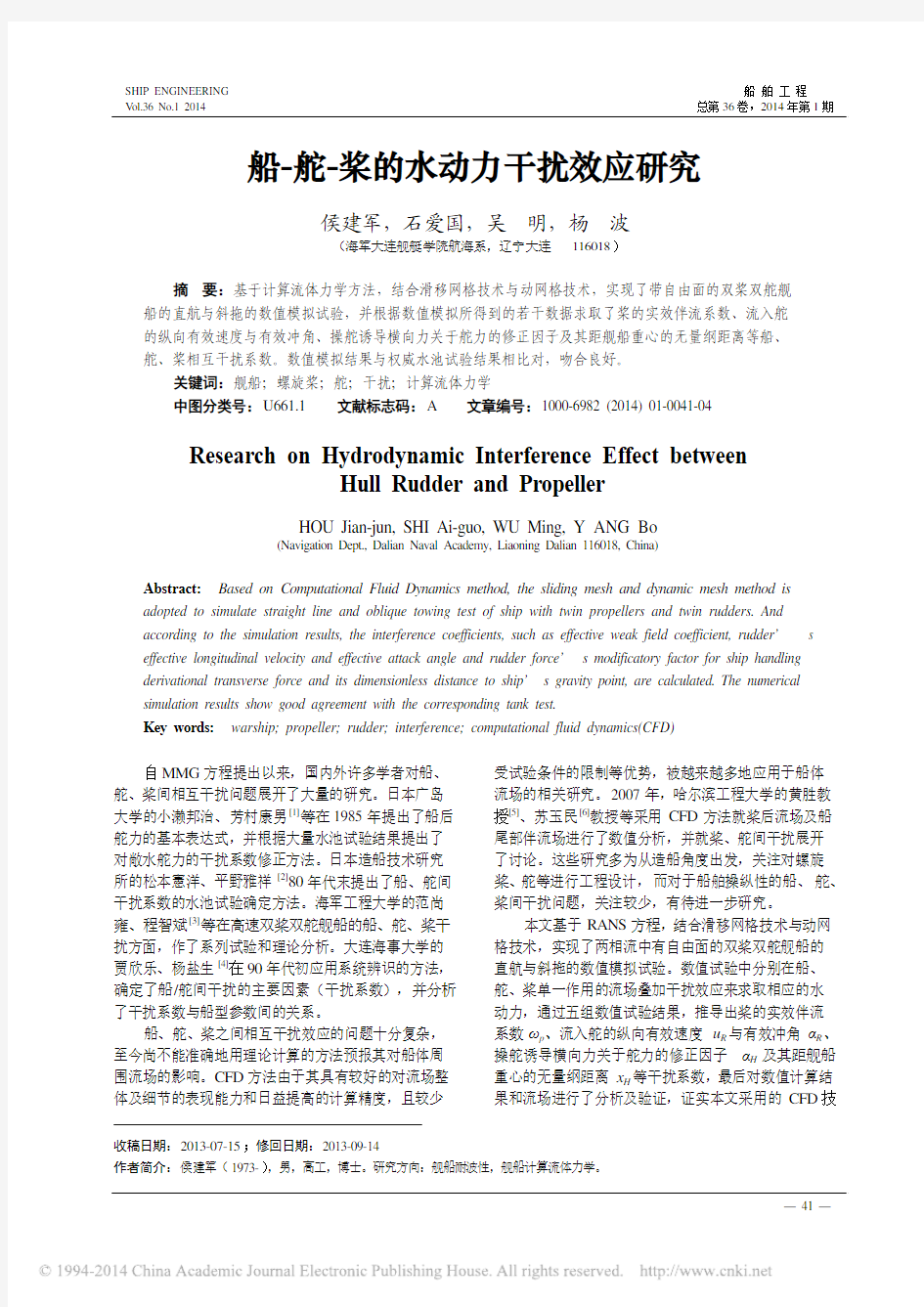
1)斜拖试验
数值模拟斜拖试验,可采用相对运动的方式,保持船模正置于计算域,使来流以指定漂角流入计算域。这种设置方法可任意改变漂角而无需重新划分网格,大大提高了工作效率与网格的重复利用率。边界条件设置方法如图1所示。网格划分情况如图2所示。
图1 斜拖试验边界条件
图2 斜拖试验网格
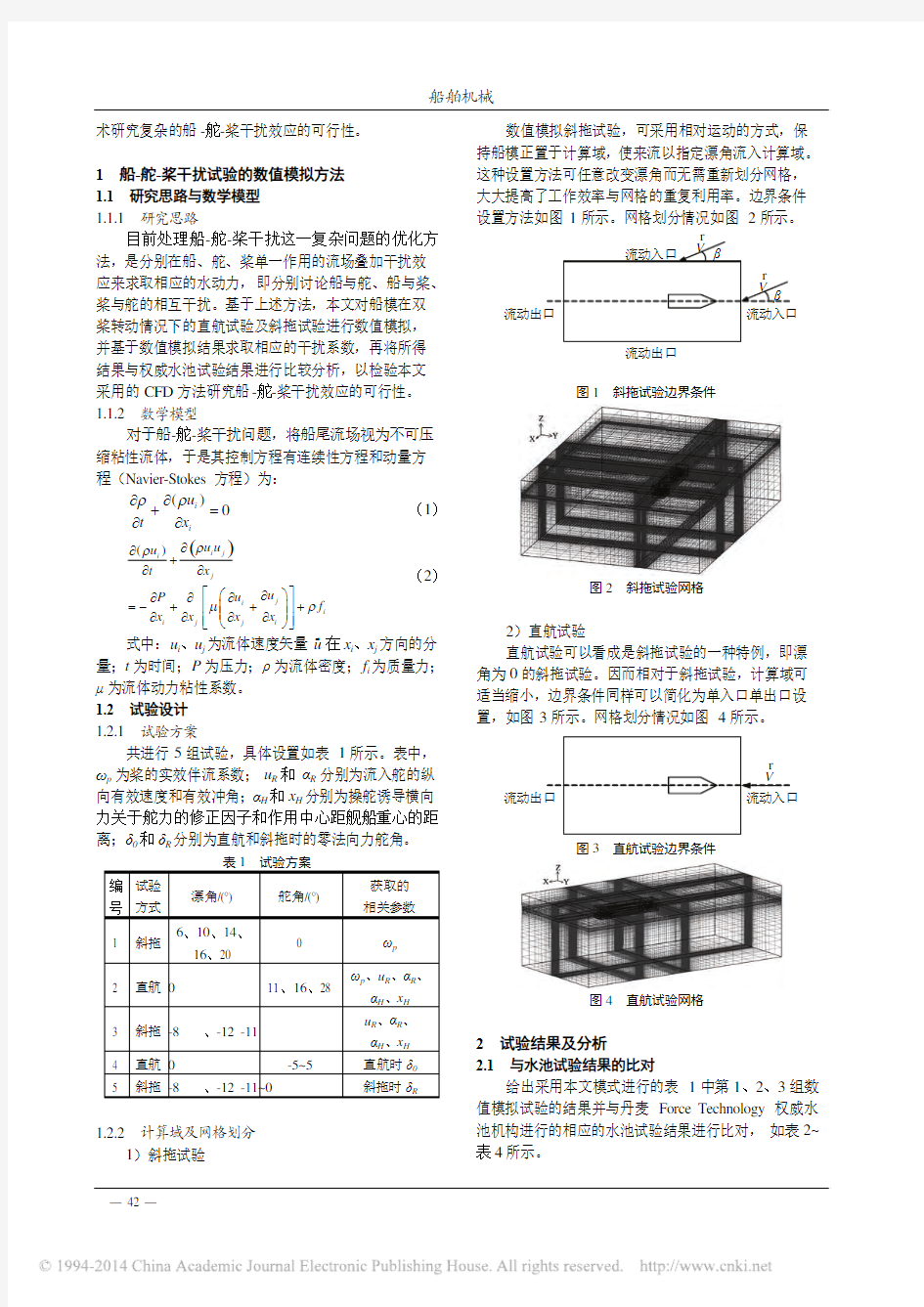
2)直航试验
直航试验可以看成是斜拖试验的一种特例,即漂角为0的斜拖试验。因而相对于斜拖试验,计算域可适当缩小,边界条件同样可以简化为单入口单出口设置,如图3所示。网格划分情况如图4所示。
图3 直航试验边界条件
图4 直航试验网格
2 试验结果及分析
2.1 与水池试验结果的比对
给出采用本文模式进行的表1中第1、2、3组数值模拟试验的结果并与丹麦Force Technology 权威水池机构进行的相应的水池试验结果进行比对,如表2~表4所示。
流动出口
侯建军等,船-舵-桨的水动力干扰效应研究
表2 第1组试验数值模拟结果
漂角/(°) X方向力/N Y方向力/N 偏转力矩/N·m 外桨推力/N 内桨推力/N
6
模拟值 40.52 -36.38 -27.31 30.75 29.53 试验值 42.38 -37.79 -29.07 31.18 29.98 相对误差 -4.39% -3.73% -6.05% -1.38% -1.50%
10
模拟值 39.14 -70.83 -48.44 31.95 28.36 试验值 41.25 -73.88 -51.93 32.54 28.93 相对误差 -5.12% -4.12% -6.72% -1.81% -1.97%
14
模拟值 39.26 -110.80 -76.79 34.19 27.40 试验值 41.67 -114.99 -82.92 34.82 28.12 相对误差 -5.78% -3.64% -7.39% -1.78% -2.56%
16
模拟值 37.34 -123.87 -86.32 35.50 26.28 试验值 39.23 -132.2 -92.44 36.00 26.73 相对误差 -4.82% -6.30% -6.62% -1.39% -1.68%
20
模拟值 31.98 -170.39 -123.71 37.18 23.57 试验值 34.45 -180.52 -136.3 37.72 23.93 相对误差 -7.17% -5.61% -9.24% -1.43% -1.50%
表3 第2组试验数值模拟结果
舵角/(°) X方向力/N Y方向力/N 偏转力矩/N·m 外桨推力/N 内桨推力/N
外舵10.8 内舵
11.4
模拟值 38.84 -24.76 41.82 30.58 29.85 试验值 40.06 -25.16 43.39 31.39 30.44 相对误差 -3.04% -1.59% -3.62% -2.58% -1.94%
外舵16.3 内舵
17.1
模拟值 34.68 -36.36 63.03 30.45 29.53 试验值 35.57 -37.51 64.73 30.77 30.26 相对误差 -2.50% -3.06% -2.63% -1.04% -2.41%
外舵27.4 内舵
28.4
模拟值 23.37 -41.86 73.47 31.02 30.82 试验值 24.34 -42.96 77.40 31.75 31.68 相对误差 -3.98% -2.56% -5.08% -2.30% -2.71%
表4 第3组试验数值模拟结果
漂角/(°) 舵角/(°) X方向力/N Y方向力/N偏转力矩/N·m 外桨推力/N 内桨推力/N
-8 外舵
-11.2
内舵
-11.5
模拟值38.13 32.96 73.58 30.56 28.34
试验值40.32 34.33 79.17 31.51 29.43
相对误差-5.43% -3.99% -7.06% -3.01% -3.70%
-12 外舵
-11.2
内舵
-11.5
模拟值37.01 69.33 99.47 31.55 27.10
试验值40.28 74.97 110.1 33.48 28.49
相对误差-8.12% -7.52% -9.65% -5.76% -4.88%
表2~表4中将本文的数值模拟结果与瑞典FORCE Technology相应的水池试验结果进行了比对,可以看出,采用本文设计的模式,对定漂角斜拖试验、定舵角直航试验以及定漂角、定舵角斜拖试验进行的数值模拟,达到了较高的精度。
2.2 干扰系数的求取
2.2.1 桨的实效伴流系数ωp
通过表1中的第1、2组试验,可得到不同漂角、不同舵角情况下的船后桨的进速u p和相应的推力T,取CFD方法预报得到的该替代桨敞水性能曲线,通过等推力法计算得到实效伴流值ωp。
由图5和图6可以看出,双桨舰船的内、外桨在伴流系数的数值与变化趋势上有很大不同,因而对于双桨舰船,不能简单地应用单桨船的相关计算结果予以代替。伴流系数受漂角的影响较大,其绝对值随着漂角的增大而增大;随着舵角的增大,伴流系数也大致呈增大趋势,但相比于漂角,舵角对伴流的影响不明显。
数值模拟得到的速度场中,在距离桨盘面0.05m 处建立垂直于舰船首尾线方向的切面,分别给出该面处漂角为14°以及舵角为16°的X、Y方向速度分布,如图7和图8所示。
船舶机械
由图7可以看出,漂角对双桨盘面处X 方向速度分布的影响不明显,对Y 方向速度分布存在较大影响,因此,漂角对伴流的影响,主要体现在对Y 方向的速度的影响上。由图8可以看出,舵角的改变,几乎未
对双桨盘面处的X 或Y 方向速度造成影响;在舵角增
大的过程中,桨盘面处的Y 方向速度一直保持着较好的对称性,也说明了舵角对伴流的影响相对于漂角的影响来说,是几乎可以忽略的小量。
图5 漂角对螺旋桨实效伴流ωp 的影响 图6 舵角对螺旋桨实效伴流ωp 的影响
图7 漂角β=14°桨盘面处X 方向和Y 方向速度分布 图8 舵角δ=16°桨盘面处X 方向和Y 方向速度分布
2.2.2 流入舵的纵向有效速度u R 与来流的有效冲角αR
由表1中第4、5组试验测得的直航与斜拖时的零法向力舵角,如表5所示。第2组试验结合第4组试验测得的直航时零法向力舵角,根据舵法向力系数法得到直航时不同舵角情况下的舵处来流的纵向有效速度u R 与有效冲角αR ,如表6所示。
由表6可以看出,直航时内舵的纵向有效速度明显要大于外舵,有效冲角同样内舵略大,因此产生的舵力,内舵要大于外舵。
表5 直航、斜拖试验的零法向力舵角 β=0°,δ0/(°) β=8°,δR /(°) β=12°,δR /(°) 外舵
内舵
外舵
内舵
外舵
内舵
-1.65 1.46 1.43 4.09 2.88 5.64
表6 直航试验数值模拟的纵向有效速度u R 与有效冲角αR
舵角/(°) u R /m·s -1 αR /(°) 外舵
内舵
外舵
内舵
外舵
内舵
10.8 11.4 1.4250 1.8928 9.34 13.0516.3 17.1 1.5515 1.8255 14.84 18.7527.4 28.4 1.7636 2.1801 25.94 30.05
注:表中内外舵角的差别,是数值模拟时为和水池试验
的测量值一致而设置的。
通过表1中的第3组试验结合第5组试验测的零
法向力舵角,根据等舵法向力系数法可得到斜拖时不同舵角情况下的舵处来流的纵向有效速度u R 与有效冲角αR ,如表7所示。
表7 斜拖试验数值模拟的纵向有效速度u R 与有效冲角αR
漂角/(°)
舵角/(°) u R /m·s -1
αR /(°)
外舵 内舵
外舵
内舵 外舵
内舵
模拟值
文献[7]
模拟值
文献[7]
模拟值
文献[7]
模拟值
文献[7]
-8 -11.2 -11.5 2.3844 1.7450 1.9495 1.7208 9.7664 11.3139
7.4103 5.9656 -12 -11.2 -11.5 2.8074 1.8020 2.6162 1.7652 8.3194 11.0148
5.8649 3.8121
文献[7]中对五条双桨双舵瘦削型水面舰艇船模进行了系列斜拖试验,并对试验结果进行了分析与整理,给出了方形系数C b 在0.45~0.55范围内的双桨双舵船模关于u R 与αR 的计算公式,本文的数值模拟结果与之相比对是合理可信的。
2.2.3 操舵诱导横向力关于舵力的修正因子αH 与该力到舰船重心的无量纲距离x'H
通过表1中的第2、3组试验,可求得定舵角直航与定舵角斜拖试验的αH 与x'H ,如表8、表9所示。
(下转第117页)
δ
ωP
10
15
2025 30
-0.005
00.005
0.0150.020.0250.030.0350.040.01β ωP
4 6 8 1012 14 16 18 2022
程逸飞等,管制下的船舶制造业多主体智能博弈仿真研究
场结构的恶化。管制体系的形成有助于更好地控制船舶建造生产活动中的需求、供给、价格、成本等各市场要素,调节船舶制造的市场结构,引导船舶制造的有序进行。
2)船舶制造业市场的管制体系是参与者各方博弈共同作用下的结果,寻找博弈的均衡点。一方面,不同的参与主体在利益驱动下平衡各种条件,寻求自身获益的最大化;另一方面,市场中船东的需求和已进入者的供给在博弈中存在缺口,并不断寻求供需的最佳状态。
3)国家和船舶制造业应根据实际情况动态调整船舶制造市场中的企业数量。为实现较高的生产效率,国家和产业应对船舶制造的市场进入可根据市场和政策的要求实行管制、放松管制或启动市场退出机制,以实现垄断经营或增加竞争对手,以保证船舶制造市场结构的动态合理。参考文献:
[1] 詹雄涛. 基于组织的多AGENT系统问题求解[D]. 福州:
福州大学, 2004.
[2] 郭健. 基于多Agent的智能管理信息系统研究[D]. 天津:
天津大学, 2009.
[3] 罗朝春. 二级电力市场交易模式与方法研究[D]. 武汉:
华中科技大学, 2005.
[4] 夏海光. MAS协调中的通信研究[D]. 武汉: 华中科技
大学, 2005.
[5] 俞卫华. 基于本体的Agent通信系统的设计与实现[D].
武汉: 华中科技大学, 2008.
[6] 万杰. 基于MAS的制造企业与供应商合作关系仿真研
究[D]. 哈尔滨: 哈尔滨商业大学, 2010.
[7] 罗批, 司光亚, 胡晓峰, 等. 基于Agent的复杂系统建模仿真
方法研究进展[J]. 装备指挥技术学院学报, 2003(1): 78-81 [8] 王三喜, 朱俊辉, 刘峰, 等. 基于Agent建模与仿真的军
事对抗系统[J]. 火力与指挥控制, 2009, 34(8): 19-23.
(上接第44页)
文献[4]指出:漂角对αH的影响较小。由表7中第一组数据以及表8可知,本文进行数值模拟得到的αH值与这一结论相符。另外,在αH的表现上,内、外舵的值差别较大,主要是因为流入舵的纵向有效速度u R以及有效冲角αR的不同导致了内、外舵力产生了较大差别。
表8 直航试验数值模拟的αH与x'H
舵角/(°) αH x'H 外舵内舵外舵内舵外舵内舵
10.8 11.4 2.9166 0.6283 -0.3979 -0.3100
21.9 22.6 2.1640 0.9029 -0.4057 -0.3675
27.4 28.4 2.1879 1.5125 -0.4139 -0.4029
表9 斜拖试验数值模拟的αH与x'H
漂角(°)
舵角/(°) αH x'H
外舵内舵外舵内舵外舵内舵
-8 -11.2 -11.5 2.75590.5614 -0.3958-0.2953 -12 -11.2 -11.5 2.68980.5345 -0.4293-0.3604
3 结论
本文首先根据可以表征船、舵、桨之间水动力干扰的五个主要系数:ωp、u R、αR、αH和x H,设计了可求取上述系数的数值试验方案,以FLUENT软件为计算平台,结合湍流模式、自由面模拟、滑移网格以及动网格等技术,实现了两相流中有自由面的双桨双舵舰船在螺旋桨转动情况下的直航与斜拖试验的数值模拟,并结合权威水池试验结果,对数值计算结果进行了分析,得出以下结论:
1)采用本文设计的模式,对定漂角斜拖试验、定舵角直航试验以及定漂角、定舵角斜拖试验进行数值模拟,得到的船体及螺旋桨所受的力和力矩与权威水池试验数据对比吻合较好,相对误差在5%左右,最大不超过10%,具有较高的精度。
2)通过分析求取的若干干扰系数发现:舵角对实效伴流值ωp的影响相对于漂角的影响是小量;直航时内舵的纵向有效速度u R明显要大于外舵,有效冲角αR 同样内舵略大;漂角对αH的影响较小,证实了文献[4]的结论。
本文还采用后CFD处理技术,再现了船、舵、桨干扰流场,为揭示船、舵、桨之间相互影响的内在规律提供了更加精密而实用的手段。
参考文献:
[1] 小濑邦治, 他. 操縱運動數學モデルの具體化[C]//第三
回操縱性シンポウム, 1983.
[2] 松本憲洋, 平野雅祥. 船體上舵との相互干涉[J]. 日本
造船學會志, 1986.
[3] 范尚雍, 程智斌, 吕韶康. 高速双桨双舵船的船-桨-舵
之间的水动力干扰[J]. 中国造船. 1989(2): 25-32.
[4] 贾欣乐, 杨盐生. 船舶运动数学模型——机理建模与辨
识建模[M]. 大连: 大连海事大学出版社, 1999. 132-138.
[5] 黄胜. 桨舵干扰的理论与实验研究[M]. 哈尔滨: 哈尔
滨工程大学出版社, 2007: 37-40.
[6] 沈海龙, 苏玉民. 基于滑移网格技术的船桨相互干扰研
究[J]. 哈尔滨工程大学学报, 2010, 31(1): 1-7.
[7] 范尚雍, 吕韶康, 程智斌. 双桨双舵船模系列斜拖试验
研究[J]. 中国造船, 1988(1): 36-45.
第13卷第3期中国惯性技术学报 2005年6月文章编号:1005-6734(2005)03-0047-05 航向、航迹自动操舵仪船舵控制系统的研制 周永余, 陈永冰, 周 岗, 李文魁 (海军工程大学导航工程系,武汉 430033) 摘要:给出了采用数字模拟与物理模拟相结合的方法模拟海上实船环境的航向、航迹自动操舵仪船—舵控制系统的设计方案和实现途径,并介绍了该控制系统的软件设计,该系统为航渡任务的安全、顺利完成提供了有力保障。 关 键 词:自动操舵仪;罗经航向;模拟航向;模拟舵角;模拟船位 中图分类号:U666.1文献标识码:A Design and Realization of Rudder Control System for Ship’s Course and Track Autopilot ZHOU Yong-yu, CHENG Yong-bing, ZHOU Gang, LI Wen-kui (Department of Navigation Engineering, Naval University of Engineering, Wuhan 430033, China) Abstract: The design project and realization approach to simulate ship and rudder control system of course, track autopilot in real navigation environment are introduced which combine digital simulation with physical simulation. Its software designs are also given. The system can guarantee for accomplishing navigation task safely and successfully. Key words: autopilot; gyrocompass course; analog course; analog rudder; analog trace. 0 概述 自动操舵仪是现代船舶上不可缺少的导航设备,其主要的功能是自动地、高精度地保持或改变船舶的航向,以保证船舶的平时安全航渡和恶劣环境时船舶的避碰。因此,自动操舵仪的性能优劣将直接关系到船舶航行的安全,并直接影响船舶的生命力[1]。 半个多世纪以来,虽然我国船舶航运的发展规模越来越大,但是船舶自动操舵仪的研制、生产和维修的调试环境却仍处于20世纪六、七十年代的水平。自动操舵仪在工厂的新产品装配后或在修理厂维修后,按理都应该对自动操舵仪的性能指标在实船环境中进行检测、调试,使性能指标满足设计要求,但实际上很难实现。 自动操舵仪每年都有新产品在制造厂研制、生产,自动操舵仪的维修在修理厂也是经常发生的。但是几十年来在自动操舵仪研制、生产和维修过程中没有一种有效的办法去实现按实船环境检测调整自动操舵仪的动态指标。制造厂和维修厂只能采用一种液压装置来模拟船舶的舵角进行线路的调试。由于该装置无法反映船舶动态航向的变化,航向或航迹控制电路只能凭经验进行粗调,要精确调 基金项目:国家自然科学基金资助项目(40376011) 收稿日期:2005-03-07 作者简介:周永余(1950—)男,海军工程大学副教授,从事舰船导航和组合导航的教学、科研工作。
第四章 简支梁(板)桥设计计算 第一节 简支梁(板)桥主梁内力计算 对于简支梁桥的一片主梁,知道了永久作用和通过荷载横向分布系数求得的可变作用,就可按工程力学的方法计算主梁截面的内力(弯矩M 和剪力Q ),有了截面内力,就可按结构设计原理进行该主梁的设计和验算。 对于跨径在10m 以内的一般小跨径混凝土简支梁(板)桥,通常只需计算跨中截面的最大弯矩和支点截面及跨中截面的剪力,跨中与支点之间各截面的剪力可以近似地按直线规律变化,弯矩可假设按二次抛物线规律变化,以简支梁的一个支点为坐标原点,其弯矩变化规律即为: )(42max x l x l M M x -= (4-1) 式中:x M —主梁距离支点x 处的截面弯矩值; m ax M —主梁跨中最大设计弯矩值; l —主梁的计算跨径。 对于较大跨径的简支梁,一般还应计算跨径四分之一截面处的弯矩和剪力。如果主梁沿桥轴方向截面有变化,例如梁肋宽度或梁高有变化,则还应计算截面变化处的主梁内力。 一 永久作用效应计算 钢筋混凝土或预应力混凝土公路桥梁的永久作用,往往占全部设计荷载很大的比重(通常占60~90%),桥梁的跨径愈大,永久作用所占的比重也愈大。因此,设计人员要准确地计算出作用于桥梁上的永久作用。如果在设计之初通过一些近似途径(经验曲线、相近的标准设计或已建桥梁的资料等)估算桥梁的永久作用,则应按试算后确定的结构尺寸重新计算桥梁的永久作用。 在计算永久作用效应时,为简化起见,习惯上往往将沿桥跨分点作用的横隔梁重力、沿桥横向不等分布的铺装层重力以及作用于两侧人行道和栏杆等重力均匀分摊给各主梁承受。因此,对于等截面梁桥的主梁,其永久作用可简单地按均布荷载进行计算。如果需要精确计算,可根据桥梁施工情况,将人行道、栏杆、灯柱和管道等重力像可变作用计算那样,按荷载横向分布的规律进行分配。 对于组合式梁桥,应按实际施工组合的情况,分阶段计算其永久作用效应。 对于预应力混凝土简支梁桥,在施加预应力阶段,往往要利用梁体自重,或称先期永久作用,来抵消强大钢丝束张拉力在梁体上翼缘产生的拉应力。在此情况下,也要将永久作用分成两个阶段(即先期永久作用和后期永久作用)来进行计算。在特殊情况下,永久作用可能还要分成更多的阶段来计算。 得到永久作用集度值g 之后,就可按材料力学公式计算出梁内各截面的弯矩M 和剪力Q 。当永久作用分阶段计算时,应按各阶段的永久作用集度值g i 来计算主梁内力,以便进行内力或应力组合。 下面通过一个计算实例来说明永久作用效应的计算方法。 例4-1:计算图4-1 所示标准跨径为20m 、由5片主梁组成的装配式钢筋混凝土简支梁桥主梁的永久作用效应,已知每侧的栏杆及人行道构件的永久作用为m kN /5。 图4-1 装配式钢筋混凝土简支梁桥一般构造图(单位:cm )
13大宗2班顾翊彬 1322330412 MAERSK 马士基 :马士基集团成立于1904年,总部位于丹麦哥本哈根,在全球135个国家设有办事机构,拥有约89,000名员工,在集装箱运输、物流、码头运营、石油和天然气开采与生产,以及与航运和零售行业相关其它活动中,为客户提供了一流的服务。集团旗下的马士基航运是全球最大的集装箱承运输公司,服务网络遍及全球。2014年马士基集团位列世界500强第172名。2012年,马士基码头公司与宁波港集团有限公司合资43亿元,投资、经营宁波梅山保税港区梅龙码头3号-5号泊位;马士基航运在青岛港集装箱吞吐首破百万标箱。 重庆市海运有限责任公司CHONGQING MARINE SHIPPING CO., LTD. 重庆集装箱 珠海北洋轮船有限公司ZHUHAI BEIYANG SHIPPING CO., LTD. 珠海集装 箱暹逻航运国际有限公司SIAM PAETRA INTERNATIONAL CO., LTD. 泰 国集装箱 日本邮船株式会社NIPPON YUSEN KABUSHIKI KAISHA 日本集装箱、滚装船奥林汽船株式会社ORIENT FERRY, LTD. 日本客货 丹东国际航运有限公司DANDONG INTERNATIONAL FERRY CO., LTD. 丹东客货韩国大仁轮渡有限公司KOREA DA-IN FERRY CO., LTD. 韩国客货 黄海轮渡株式会社YELLOW SEA FERRY CO., LTD. 韩国客货津川国际客货秦皇岛秦仁海运有限公司QIN-IN FERRY CO., LTD. 秦皇岛客货 荣成大龙海运有限公司RONGCHENG GREAT DRAGON SHIPPING CO., LTD. 荣成客货 荣成华东海运有限公司HUADONG FERRY CO., LTD. 威海客货 上海国际轮渡有限公司SHANGHAI INTERNATIONAL FERRY CO., LTD. 上 海客货 上海仁川国际轮渡有限 司SHANGHAI INCHON INTERNATIONAL FERRY CO., LTD. 上海客货 上海游轮公司SHANGHAI CRUISE CO., LTD. 韩国客货 水晶航运有限公司CRYSTAL FERRY CO., LTD. 韩国客货 天津津神客货轮船有限公司TIANJIN JINSHEN FERRY CO., LTD. 天津客货威海威东航运有限公司WEIHAI WEIDONG FERRY CO., LTD. 威海客货 烟台中韩轮渡有限公司YANTAI ZHONGHAN FERRY CO., LTD. 烟台客货 中日国际轮渡有限公司CHINA-JAPAN INTERNATIONAL FERRY CO., LTD. 上海毅发船务有限公司JUMBO RICH SHIPPING LIMITED 香港客运 丽星邮轮(香港)有限公司STAR CRUISES (HK) LIMITED 香港旅游船 太平洋(海南)邮轮有限公司PACIFIC CRUISES (HAINAN) LTD. 香港旅游船太阳神豪华邮轮有限公司APOLLO LUXURY CRUISES CO., LTD 英属维尔京群岛旅游船 天运船务公司SKY-HIGH FORTUNE MARITIME INC. 利比里亚旅游船 邮轮客运(香港)有限公司CRUISE FERRIES (HK) LIMITED 香港旅游船 中国海洋豪华邮轮有限公司CHINA OCEAN DELUXE CRUISES LIMITED 香 港旅游船
?蝴蝶效应(千万别忽略你身边的小事) 鲶鱼效应(鲶鱼能激发你的潜能) 羊群效应(理性思考,不盲目做羊群) 青蛙现象(居安应思危) 破窗理论(环境有力地改变了我们的思维) 鳄鱼法则(懂得放弃,上天会为你打开别一扇窗) 刺猬法则(“疏者密之,密者疏之”———是成功之道) 手表定律(目标多只会失败,目标只有准确才能成功) 二八定律(做生活中的20%,你就成功了) 木桶理论(有时三个臭皮匠好比一个诸葛亮) 马太效应(弱者愈弱、强者愈强) 多米诺骨牌效应(做好事情的每个环节,才能远离失败)丁蟹效应(理性想考,但不能逆着大势) 瓶颈效应(协调各个环节才能摆脱瓶颈效应) 鸟笼逻辑(理性思考,不要总是让别人改变自己) 责任分散效应(时刻不降低自己的责任感、使命感) 帕金森定律(用最短的时间,做好你应该做的事情) 晕轮效应(不因为别的人光环,而改变客观的思维) 墨菲定理(越害怕的东西越是可能发生,改变心态最重要)彼得原理(“拉动”“推动”才能自我进步、提升) 不值得定律(不是值得的东西也去认真做好——成功者)狼群效应(重视集体的力量) 霍桑效应(提高生产效率的决定因素是员工情绪) 首因效应(第一印象的重要性) 丛林法则(适者生存,不适者淘汰) 习得性无助(习惯一形成,短时时内很难改变) 皮格马利翁效应(罗森塔尔效应)(学会欣赏、赞美别人) 虚假同感偏差(改变主观认同,学会客观调查) 培哥效应(记忆也有方法) 250定律(得罪一位顾客,你就失去了250位顾客) 黑天鹅效应(意料之外的一点点,却又改变一切) 贝勃定律(少做锦上添花的事,多做雪中送炭的事) 蘑菇管理(吃的苦中苦,方为人上人) 马蝇效应(每一个领导,都应学会激励之术) 凡勃伦效应(有时商品价格定得越高越能畅销) 超限效应(刺激过多、过强会成反作用,学会适可而止)达维多定律(淘汰自己旧的东西、想法,不断超越自己)自己人效应(“自己人”所说的话更信赖、更容易接受) 苛希纳定律(用人不在多,用人贵精) 华盛顿合作定律(“三个和尚没水吃”) 蔡加尼克效应(没完成的工作,你会更记得) 迁移效应(知识和经验对解决新问题的重要性) 梅菲定律(有心栽花花不发,无心插柳柳成荫) 坐向效应(人与人的坐向对人的心理起着重要作用)
如何面对考试主题班会 活动目的: 1、认识常见的心理障碍,理解考试紧张是常见的心理障碍。 2、通过学生考试紧张心理自测,使学生懂得对待考试会有适度紧张心理,但要注意消除过度紧张心理。 3、通过活动与学习,培养正确的应考心理,学会自我调适的技巧。同时教育学生在考试时做到认真审题,动脑思考,卷面整洁等好习惯。活动准备: 主题班会课件 二、理论分析: 考试是每个学生在学习生活中必然遇到的事情,过度紧张是学生中常见的心理障碍,遇到考试有的学生情绪高度紧张,心慌、头昏,记忆困难,思想难以集中等现象。 对考试漠不关心,抱“无所谓”的态度,也是目前某些小学生对待考试的不正常心理,同样应帮助他们认识其危害性,引起足够重视。 活动过程: 一、谈话导入 师:同学们,学期已经过去一半了,明天就是我们的其中考试,从一年级到现在经历的各式各样考试很多次了,对于考试你最想说什么?
生:自由分享 二、好的考试信念 1、测测你的心态 人与人之间只有很小的差异,但这种很小的差异却往往造成巨大的差异!很小的差异就是所具备的心态是积极的还是消极的,巨大的差异就是成功与失败。 ——拿破伦.希尔 2、好的考试信念 恰如其分地展示自己的知识水平 1、考试只是对自己某个阶段学习情况的一个检测,并不代表是永远的成绩。 2、学习是硬功夫,考试是软功夫,学习软功夫之前,一定要先打下实实在在的硬基础。会学习、会考试。 3、试题难大家难,能做多少就做多少。试题容易不窃喜,当心里面有陷阱。 三、常见的心理障碍 1、观察图片,说出图片主人公的问题(过分紧张或者过于懈怠) 2、故事会 把斧子卖给小布什; 瓦伦达效应; 3、学习动机与结果的关系,倒U形 教师总结:科学家研究的成果,即考试焦虑程度与学习效果之间呈
国内各大船厂介绍 在中国的船舶工业中占有十分重要的地位,有目前国内规模最大、建造产品最齐全、最具有国际竞争力的现代化船舶总装企业,就是以前的大连造船厂,1990年原造船厂分为大连造船新厂和大连造船厂,我们习惯上称作“新厂”和“老厂”,两个厂子2005年12月9日合为一家,称作“大连船舶重工集团有限公司”,上属单位是中船重工。现在接手的多是油船、老厂接手的多是军船,以造军品为主,另外也接不少民船,因为海军的舰船有相当一大部分出自老厂,所以又被誉为“海军舰艇的摇篮”。2004年大连新厂入选了英国《劳氏》船级社的世界大型船厂,排行第七位。现有三十万吨级大坞两座,新厂的九百吨龙门吊被称作亚洲第一吊。现在合并之后把老厂附近的渔轮公司、黑嘴子港买了下来,把邮政码头租了下来,把老厂称为“一工场”,新厂称为“二工场”,这就是说还有“三工场”,“四工场”,他们的目标是建立一座现在化的船舶总装厂。2006年低,根据最新的统计资料,大连船舶重工已经成为了全国最大、世界第六大的造船企业。 中远集团的修船厂在大连湾,也就是“大连中远船务工程集团有限公司”,是目前中国最大的修船厂,还有我国最大的三十万吨级浮船坞,2003年中远总公司以曾被《劳氏亚洲海运》杂志评为亚洲四个“最佳修船厂”之一的南通远洋船务公司为核心,整合了大连、广州等地的中远修船资源,在南通成功组建被誉为中国修船业“航母”的中远船务工程集团有限公司,2007年8月6日,大连中远造船工业有限公司在旅顺开发区羊头洼正式挂牌成立,主要工程为建设一座包括两个30万吨级船坞在内的国际一流水准现代化造船厂。 大连辽南船厂(海军四八一零(海军4810)工厂,即旅顺大坞)是李鸿章建立北洋水师的时候建立的,现已成为旅顺海军基地最大的军工生产单位,修建的船舶包括了各种军船,从驱逐舰到护卫艇再到海警的巡逻艇,还有一些海军特种船,另外也接手少量民船包括远洋运输船、渔船和特种船等。造游艇很出名的大连松辽船厂(即解放军七八一四(陆军7814)工厂),隶属于沈阳军区工厂管理局,是一个陆军船艇的修造基地,为全军陆军船舰修造能力最强的厂家,算是中型企业,建造得船舶包括成品油轮、登陆艇、高速双体船、全封闭救生艇等
考前 心态调节是关键 随着高考中考的降临,不少学生在这段时间内呈现忐忑不安、烦躁、担忧的心情,严重时,令人很难入睡,以至彻夜未眠,当然也就会影响考试状态。面对高考的升学压力,绝大多数考生可以冷静应对,但也有部分考生会呈现严重的焦虑心理,过度担忧考试成果,招致自觉采取“疲倦战术”,在冲刺阶段超负荷加班加点。 一些考生也会呈现仇恨心理,将无处发泄的压力转嫁到别地方,以至对父母大发脾气,让家长也很惧怕。个别考生因为觉得升学无望,呈现绝望心理。这些心理问题不仅会严重影响孩子考前温习效果和考试临场发挥,而且很可能一触即发,招致其他过激行为的发作,酿成苦果。 据调查,形成中、高考前青少年心理情况猛烈动摇的缘由是多方面的。考生自身心理素质不过关是其中一方面要素,而局部家长单纯注重孩子考前温习,给孩子施加过多压力,也是招致孩子考前心理变化的重要缘由。 每年的高考、中考中,有60%的学生能做到正常发挥,20%的学生超凡发挥,还有20%的学生则会发挥失常。其中,女生发挥失常的比例又普遍高于男生。学生在高考中发挥超凡或失常,与其心理状态有巨大的关系,容易慌张的学生常常会由于一门考试不理想而影响其他科目的发挥。因而,调整学生的心态要从如今做起,要让考生保持昂扬的、充溢自信的情绪状态,从容面对高考。 具体方法: 1、考前找一个时间,转移一下对考试过度的关注力,放松玩一下,比方和要好的同窗聊天、逛街,会让慌张的身体和大脑放松下来。 2、胜利想象法:找一个不被打搅的环境,或睡前、醒后先让本人宁静下来,重复想象本人良好、淡定的考试状态,或某次考试状态较好的场景和觉得(重复屡次锻炼)。 3.恰当活动、运动下能加强神经系统功用,进步神经系统的兴奋性、灵敏性,加强意志,同时可增加深睡眠,增加记忆蛋白合成,进步学习效率。 4.不要牺牲睡眠时间学习。坚持每天按时睡觉、定时起床,保证充足的睡眠。总之要想获得好成果,考前一定放轻松!
例1-1续1 如果操纵杆角仇改变了,而舟昔舵仍处于原位,则电位器 输出代工0,佟经放大后使电动机通过减速器连同船舵和输出电位计滑臂一起作跟随仇给定值的运动。当3(>=6,时,电动机停转,系统达到新的平衡状态,从而实现角位置跟踪的目的。 由上分析可见,操纵杆是输入装置,电位计组同时完成测量和比较功能,电压、功率放大器完成调节器工作,电动机和减速器共同起执行器的作用。 系统的原理方块图如下: [例1-2]:“转速控制系统”之“开环控制系统”
原理图方块图 系统的给定输入量是比,扰动输入量是负载干扰M, 输出量是电动机转速n,被控对象是电动机。 作原理:将电压%经功率放大后获得百,由%驱动电动机旋转。5和n具有一一对应的关系,如当Ug=Ug[, n=n i°但是,当电动机的负载改变时,U° = U。]时,&可能n=n i+An,也就是说,比和n的关系是不准确的。——开环系统的输出易受到扰动的影响而无能为力。
[例1-2]续:“转速控制系统”之“闭环控制系统” 原理图方块图 工作原理:当负载扰动变化时(如变大),则4,^1, Ue = Ug-w\,n\o可见,该系统可以自动地进行转速调节, 以减小或消除偏差仏O [例1-3]:用原理方块图表示司机沿给定路线行驶时观察道路正确驾驶的反馈过程。
司机根据眼睛观察到的汽车行驶路线、障碍物和汽 车的前进方向,估计汽车的前进路线。再由实际道路与 估计的前进路线的差距指挥手来操纵方向盘,以使汽车 实际 正确地沿道路前进。原理方块图如下: 道路 该系统中,输入量是道路信息,输出量是实际的行 车路线。大脑是控制器,手、方向盘和驱动机构是执行 元件,车体是被控对象。眼和大脑作为反馈装置。
第四章 简支梁(板)桥设计计算 第一节 简支梁(板)桥主梁内力计算 对于简支梁桥的一片主梁,知道了永久作用和通过荷载横向分布系数求得的可变作用,就可按工程力学的方法计算主梁截面的内力(弯矩M 和剪力Q ),有了截面内力,就可按结构设计原理进行该主梁的设计和验算。 对于跨径在10m 以内的一般小跨径混凝土简支梁(板)桥,通常只需计算跨中截面的最大弯矩和支点截面及跨中截面的剪力,跨中与支点之间各截面的剪力可以近似地按直线规律变化,弯矩可假设按二次抛物线规律变化,以简支梁的一个支点为坐标原点,其弯矩变化规律即为: )(42 max x l x l M M x -= (4-1) 式中:x M —主梁距离支点x 处的截面弯矩值; m ax M —主梁跨中最大设计弯矩值; l —主梁的计算跨径。 对于较大跨径的简支梁,一般还应计算跨径四分之一截面处的弯矩和剪力。如果主梁沿桥轴方向截面有变化,例如梁肋宽度或梁高有变化,则还应计算截面变化处的主梁内力。 一 永久作用效应计算 钢筋混凝土或预应力混凝土公路桥梁的永久作用,往往占全部设计荷载很大的比重(通常占60~90%),桥梁的跨径愈大,永久作用所占的比重也愈大。因此,设计人员要准确地计算出作用于桥梁上的永久作用。如果在设计之初通过一些近似途径(经验曲线、相近的标准设计或已建桥梁的资料等)估算桥梁的永久作用,则应按试算后确定的结构尺寸重新计算桥梁的永久作用。 在计算永久作用效应时,为简化起见,习惯上往往将沿桥跨分点作用的横隔梁重力、沿桥横向不等分布的铺装层重力以及作用于两侧人行道和栏杆等重力均匀分摊给各主梁承受。因此,对于等截面梁桥的主梁,其永久作用可简单地按均布荷载进行计算。如果需要精确计算,可根据桥梁施工情况,将人行道、栏杆、灯柱和管道等重力像可变作用计算那样,按荷载横向分布的规律进行分配。 对于组合式梁桥,应按实际施工组合的情况,分阶段计算其永久作用效应。 对于预应力混凝土简支梁桥,在施加预应力阶段,往往要利用梁体自重,或称先期永久作用,来抵消强大钢丝束张拉力在梁体上翼缘产生的拉应力。在此情况下,也要将永久作用分成两个阶段(即先期永久作用和后期永久作用)来进行计算。在特殊情况下,永久作用可能还要分成更多的阶段来计算。 得到永久作用集度值g 之后,就可按材料力学公式计算出梁内各截面的弯矩M 和剪力Q 。当永久作用分阶段计算时,应按各阶段的永久作用集度值g i 来计算主梁内力,以便进行内力或应力组合。 下面通过一个计算实例来说明永久作用效应的计算方法。
Radio Control Systems 遥控系统 By Paul Williams. Article posted 1st March 2008. Problems with radio control systems seem to plague FE boaters. This is not surprising, given the harsh environment these delicate electronic components have to tolerate. High humidity, high temperatures, motor noise and vibration combine to make life difficult for receivers and servos. 遥控系统的问题对于竞速船是个麻烦事,因为这个精 致的电子设备必须忍受恶略的环境。高湿度,高温度,噪音,震动很容易缩短接受和舵机的寿命。 Blaming the environment, however, cannot mask the fact that many FE boaters do themselves no favours when fitting out their radio system. Some of the cardinal sins I've seen committed include cutting the original aerial wire. Do not do this. The aerial is meant to be a fixed unbroken length. Altering the tuned length and introducing connectors immediately compromises the receiver's ability to pick up a clean signal. Run the aerial wire vertically up and out of the boat through a length of thin plastic tube. 然而,抱怨环境是解决不了问题的。我曾经指出过,不可以减 短接受天线,改变天线长度或者加上一个连接器,立刻就会影响接受器接受信号的能力。让天线竖直,并且伸出舱外。 Cheaper radios often have very long aerial wires. Don't be tempted to coil up the excess length of aerial inside the boat. Run the whole length up and out, securing the aerial end to the base of the aerial tube. When the boat is running, the slipstream will pull the aerial into an open loop. 廉价的接受一般会有很长的天线。不要把天线缠绕的放置在船内。一定要让天线伸展开来,并且用天线座安装好,高速气流可能会把天线吹开。
主梁的内力计算 主梁的内力计算包括恒载内力计算和活载内力计算。根据上述梁跨结构纵、横截面的布置,计算活载作用下的梁桥荷载横向分布系数,求出各主梁控制截面(取跨中、四分点、变化点截面及支点截面)的恒载和最大活载内力,然后再进行主梁内力组合。 一、恒载内力计算 1、恒载集度 ⑴预制梁自重(第一期恒载) ①.跨中截面段主梁自重(四分点截面至跨中截面,长7.25m ) (1)0.861625.07.25156.165g KN =??= ②.马蹄抬高与腹板变宽段梁的自重近似计算(长3.7m ) 主梁端部截面面积为A=1.176m 2 ()(2) 1.17600.8616 3.725.0/294.239g KN =+??= ③.支点段梁的自重(长3.55m ) (3) 1.1760 3.5525.0=104.37g KN =?? ④.横隔梁的自重 中横隔梁体积为: ()30.16 1.590.920.240.72/20.120.12/20.219072m ??-?-?= 端横隔梁体积为: ()30.25 1.840.80.20.6/20.353m ??-?= 故半跨内横隔梁重量 ()(4)20.21907210.3532519.7786g KN =?+??= ⑤.主梁永久作用集度 ()156.16594.239104.3719.7786/14.9825.00/g KN m KN m I =+++= (2)第二期恒载
①翼缘板中间湿接缝集度 ()50.40.1625.0 1.6/g KN m =??= ②现浇部分横隔梁 一片中横隔梁(现浇部分)体积:3 0.16 1.590.20.05088m ??= 一片端横隔梁(现浇部分)体积:3 0.250.2 1.840.092m ??= 故()()630.0508820.09225.0/29.960.2809/g KN m =?+??= ③桥面铺装层 6cm 沥青混凝土铺装:0.0612.52317.25/KN m ??= 将桥面铺装重量均分给五片主梁,则 ()717.25/5 3.45/g KN m == ④防撞栏:两侧防撞栏均分给五片主梁,则 ()87.52/53/g KN m =?= ⑤主梁二期永久作用集度 II 1.60.2809 3.4538.3309/g KN m =+++= 2、永久作用效用:下面进行永久作用效用计算(参照图1-4),设c 为计算截面至左侧支座的距离,并令/a c l =。 主梁弯矩M 和剪力V 的计算公式分别是 ()21 12a M a a l g =- ()1 122 a V a gl = - 永久作用效用计算见表1-2。
一、认识真正的自己 了解真实的自己,正视客观的事实 巴纳姆效应-人贵在自知,难在自知 ●故事缘由:“巴纳姆效应”是以著名魔术师费尼公司·泰勒·巴纳姆来命名 的,他曾经在评价自己的表演时说,他的节目之所以受欢迎,是因为节目中包含了每个人都喜欢的成分,所以每一分钟都有人上当受骗。 ●专家总结:人们很容易受到来自外界信息的暗示,从而出现自我知觉的偏差, 认为一种笼统的、一般性的人格描述十分准确地揭示了自己的特点。 因果定律-任何一种结果的出现,都不是偶然的 ●故事缘由:“因果定律”是由著名哲学家苏格拉底提出的,又称为因果法则, 指无论哪一方面的成功或是失败都不是偶然的,而是有着一定因果关系的必然,即每件事情的发生都有某个理由,每个结果都有特定的原因,这个法则非常深奥且极大影响力,以致世人将其称之为人类命运的“铁律”。 ●专家总结:“种瓜得瓜,种豆得豆,种下什么样的因,就会有什么样的果。 瓦拉赫效应-找到自己的最佳出发点 ●故事缘由:“瓦拉赫效应”是以著名的诺贝尔化学奖获得者奥托·瓦拉赫命 名的,瓦拉赫曾一度被学校公认为最笨拙的学生之一,后来这个在文学艺术方面被公认为“不可造就之材”,在化学领域里十分地成功。 ●专家总结:人的智能发展会呈现出不均衡性,每个人都有自己独特的智能强 点和弱点,能够找到智能强点中的最佳点,自身隐藏的潜力便能得到极致的发挥,进而取得惊人的成绩。 印刻效应-先入不一定为“主” ●故事缘由:“印刻效应”是德国著名的行为学家海因罗特发现,他在实验中 即小鹅破壳而出第一眼见到的不是自己的母亲,哪怕是对它有伤害的其他动物,也会自动跟随其后,这一实验现象后被德国另一位行为学家洛仑兹命名为印刻效应。 ●专家总结:生活中人们对于第一印象是深刻的,而对于第二、第三事物…… 则没有深刻的印象,人的思维也会被所得到的第一信息所左右,简单概括便是先入为主。 三分之一效应-看似第一的东西,不一定是最好的 ●故事缘由:“三分之一效应”属于决策、选择中的心理偏差,指人生在世经 常会面临二选一或多选一的情况,特别是多选一,难度更大且易使选择者陷入迷茫的状态中。 ●专家总结:在生活中,人们经常要面临多种选择,而受到传统思维或固定模 式的影响,人们做出的看似正确的选择,却不一定是正确的。 惯性定律-命运经常被习惯主宰 ●故事缘由:“惯性定律“即牛顿第一定律,发现者是伽利略。伽利略大胆地 将事实和思维结合起来,在观察和分析了大量物体运动的基础后断言:“在没有外力作用于物体时,物体将保持静止或做匀速直线运动。” ●专家总结:人们心中一旦形成某种思维定势,便会呈现出一种惯性状态。无 论对待什么事情,都会自然而然地顺着过去的习惯去思考,得出结论,最终付诸实践。 晕轮效应-爱屋及乌和以偏概全 ●故事缘由:“晕轮效应”又称“光环效应”,是由美国著名心理学家爱德华·桑
同毅自动化舵轮及IxL驱动器简易使用手册 目录 同毅自动化舵轮及驱动器简易使用手册 (1) 目录 (1) 一、确定产品型号与配件(硬件) (2) 1. 舵轮标准配线及接线 (2) 2. 端子定义 (3) 二、使用和调试说明(软件) (4) 1. 打开软件ServoApp 并导入XML文件(parameters_9623) (4) 2. 建立通讯 (4) 3. 参数设置 (4) 4. 设置完成以上参数 启动电机自学习 (5) 5. 电机试运行步骤 (5) 1) 电机数据刷新伺服使能 (5) 2) 控制模式选择 (5) 3) 电机状态反馈 (6) 6. 转向电机回零设置 (6) 三、通讯参数设置 (9) 四、同毅驱动Canopen建议使用方式 (10) 五、 同毅驱动MODBUS使用例程 (12)
一、确定产品型号与配件(硬件) 一台舵轮配两台驱动器:行走驱动器 、转向驱动器。 1.舵轮标准配线及接线 行走电机(驱动电机): 一根编码器线(端子 16 针) 一根电机动力线(U,V,W 对应的驱动 C,B,A) 一根抱闸线 转向电机: 一根编码器线(端子 16 针) 一根电机动力线(U,V,W 对应的驱动 C,B,A) 限位开关(已经接好直接接在转向驱动I/O口) 中间限位(控制人员选择性使用)
2.端子定义 请参考 IXL-Ⅱ系列低压伺服驱动器用户手册 !!!请按照按照电气标准正确接线
二、使用和调试说明(软件) 1.打开软件ServoApp 并导入XML文件(parameters_9623) 2.建立通讯 设置好波特率和串口后点击连接(点击串口扫描),右下角由“离线”变成“在线”说明连接成功。 3.参数设置 电机设置界面:设置电机额定转速、额定电流、编码器类型
1、MAERSK:这家公司祖上北欧海盗出身,后来走正途作了航运,总部在哥本哈根,是 6层小楼,有电梯,但是没什么人坐电梯,因为大老板每天爬楼梯到自己六楼办公室,所 以没人敢坐,都爬楼。Mearsk以自大、死板、守信誉着称,其上缴税收占到丹麦政府收入 的40%,在丹麦巨牛。其外派人员以素质低着称,例如中国区总经理苏恩深原来在丹麦就 是开机卡的司机,据说他填履历表学历一栏从来都是空着。但是Mearsk对新员工要求很高,分为employee和trainee,前者是一般雇员,后者要到丹麦总部经过几个月的集中培训, (巨残酷,教材有辞海那么厚,3本)然后派到世界各地任职,最后不管男女,上船锻炼 半年,再委以重任。 关于马士基的评论,句句属实!!强帖!!不过苏老头(MSK内部称光头佬)只是GCA 大中华区的总经理,补充一下. (自家话:我听说MSK的人工工资都超高的,业务出差,都一定得住5星以上,不知是 不是真的?) 2、MSC:欧洲黑社会的洗钱机构,在瑞士注册。据说MSC到船厂造船是这样的:派几个人,用很大很大的皮箱提好多现金,和船厂谈好合同以后,把皮箱打开,从里面数出一定 比例现金,然后把其余的交给船厂,说我的佣金我已经拿走,这是订金,签合同吧。MSC 的船名以*女的名字居多,如洛丽塔、法米娅之类。MSC从不和其他公司融舱,船都大的 要命,运价低得要命,服务差得要命。也很少租箱子,全部是自有箱。 (自家话:现在局面也改了,黑社会也开始从良了。MSC现在的运价也不算便宜了。) 3、长荣海运EMC:张荣发40年心血的结晶,管理十分混乱,咎其原因是因为张荣发老婆太多,老婆多了儿子自然多,张大老板有6个儿子,2个女儿,这么多儿女是要安排工作的,可是除了二儿子没有一个着调的,儿女之间互相倾轧,十分惨烈。长荣是股份公司, 张荣发控股,但是还有他人股份,当年航运市场最低迷的时候,张荣发拿自己的钱注册了 立荣,以防长荣忽然倒下自己没有退身之所。但后来市场越来越好,长荣越来越好,于是 就让长荣高价收购了立荣,张荣发自己大赚一笔。后来为了经营两岸直航,继续收购意邮,以欧洲公司的名义作直航。去年又成立HASU MARINE(绝对内幕),因为2006年长荣运力将增长40%,要分散风险。 4、再说中远。扣死扣(cosco)是中国的第二海军,享受国家最最最优惠的航运政策。我 们接触比较多的是中远集运,这两年航运市场市场贼好,但是中集没赚道什么钱,主要原 因是中集运价体制太乱,特价申请满天飞,差不多每张申请都有背景,主管人员又不得不批。作为老牌国企,中远在管理体制上存在诸多问题,例如船员收入,十分的底。有传说 现任集团总裁魏家福当时从新加坡调任天远总经理的时候,他在新加坡的行李用中远的集 装箱船捎带到天津,船员听说这批东西是上面某位重要领导的,于是毫不犹豫的把几大箱 子宝贝全扔到了海里,箱子里面有很多股东和文物。据说打这以后中远对船员更加苛刻。 前一段时间中远成立了泛亚航运,将近洋航线全部纳入泛亚旗下,中远集运主体专着做好 全球中远洋航线。中远还是当代中国航运界的黄埔军校,很多航运界想当当的人物都有从 中远服务的经历,这种现象也说明另一个问题:中远就像一块肥肉,有本事的人肯上一大 口就走,跑到别处慢慢吃,中远造就了多少百万富翁,不得知晓。 5、铁行渣华:P&O和Nedlloyd原是两家公司,P&O就是大名鼎鼎的“半岛及东方”,学过海商法的人都知道“喜马拉雅条款”(此条款就印在每一份提单的背面),最早的判例 就是出自该公司。97年的时候(好像,大概是这时间),两家公司把集装箱业务拿出来合
蝴蝶效应(千万别忽略你身边的小事) 鲶鱼效应(鲶鱼能激发你的潜能) 羊群效应(理性思考,不盲目做羊群) 青蛙现象(居安应思危) 破窗理论(环境有力地改变了我们的思维) 鳄鱼法则(懂得放弃,上天会为你打开别一扇窗) 刺猬法则(“疏者密之,密者疏之”———是成功之道) 手表定律(目标多只会失败,目标只有准确才能成功) 二八定律(做生活中的20%,你就成功了) 木桶理论(有时三个臭皮匠好比一个诸葛亮) 马太效应(弱者愈弱、强者愈强) 多米诺骨牌效应(做好事情的每个环节,才能远离失败)丁蟹效应(理性想考,但不能逆着大势) 瓶颈效应(协调各个环节才能摆脱瓶颈效应) 鸟笼逻辑(理性思考,不要总是让别人改变自己) 责任分散效应(时刻不降低自己的责任感、使命感) 帕金森定律(用最短的时间,做好你应该做的事情) 晕轮效应(不因为别的人光环,而改变客观的思维) 墨菲定理(越害怕的东西越是可能发生,改变心态最重要)彼得原理(“拉动”“推动”才能自我进步、提升) 不值得定律(不是值得的东西也去认真做好——成功者)狼群效应(重视集体的力量) 霍桑效应(提高生产效率的决定因素是员工情绪) 首因效应(第一印象的重要性) 丛林法则(适者生存,不适者淘汰) 习得性无助(习惯一形成,短时时内很难改变) 皮格马利翁效应(罗森塔尔效应)(学会欣赏、赞美别人) 虚假同感偏差(改变主观认同,学会客观调查) 培哥效应(记忆也有方法) 250定律(得罪一位顾客,你就失去了250位顾客) 黑天鹅效应(意料之外的一点点,却又改变一切) 贝勃定律(少做锦上添花的事,多做雪中送炭的事) 蘑菇管理(吃的苦中苦,方为人上人) 马蝇效应(每一个领导,都应学会激励之术) 凡勃伦效应(有时商品价格定得越高越能畅销) 超限效应(刺激过多、过强会成反作用,学会适可而止)达维多定律(淘汰自己旧的东西、想法,不断超越自己)自己人效应(“自己人”所说的话更信赖、更容易接受) 苛希纳定律(用人不在多,用人贵精) 华盛顿合作定律(“三个和尚没水吃”) 蔡加尼克效应(没完成的工作,你会更记得) 迁移效应(知识和经验对解决新问题的重要性) 梅菲定律(有心栽花花不发,无心插柳柳成荫) 坐向效应(人与人的坐向对人的心理起着重要作用)
船舶运动控制概述 随着经济全球化的加剧,现代物流业飞速发展,市场对进出口的需求越发的加大,造成了与之相应的航运自动化的繁荣发展,各种新的控制算法不断地应用于传播控制以提高营运的经济效益。作为大连海事大学自动化专业的学生,我们有必要了解船舶相关的知识,包括船舶运动控制,船舶控制系统,船舶导航等的相关知识。并将储备的知识运用到以后的学习与工作中。 一、欠驱动船舶的控制器设计 首先我们先来聊聊船舶的驱动。由于船舶动力驱动结构具有非完整约束和典型的欠驱动特性,而且航行条件的变化、环境参数的严重干扰和测量的不精确性等又使船舶运动呈现出大惯性、长时滞、非线性等特点,采用传统的船舶控制方法已经不能满足控制要求,必须探索新的船舶控制方法。 欠驱动系统是指由控制输入向量空间的维数小于系统广义坐标向量空间维数的系统,即控制输入数小于系统自由度的系统[1]。欠驱动船舶模型一般都具有非线性运动方程的形式,欠驱动船舶模型一般都具有非线性运动方程的形式,欠驱动船舶模型一般都具有非线性运动方程的形式,约束都是不可积的微分表达式,属于非完整系统。 研究欠驱动船舶的控制器设计也具有非常重要的现实意义。一个欠驱动船舶以较少数目的驱动器来完成航行任务,降低了系统的费用及重量,提高了营运效益,同时也会因控制设备的减少而降低船舶机械故障的发生率,使系统运行更加稳定而易于维护。更为重要的是,欠驱动控制同时对船舶完全驱动系统提供了一种备份控制技术。如果全驱动系统遇故障不能正常运行时,可采用欠驱动船舶控制策略,利用仍在工作的控制器对船舶进行有效控制,增大设备出现故障时系统的可靠性。 正是由于上述原因,对欠驱动船舶的控制研究得到了广泛重视并成为控制领域的研究热点之一[2]。作为一种特殊的非线性控制方法,欠驱动船舶控制技术的发展目前还存在着很多问题,有待于更多的科技工作者致力于深入的研究。为了促进欠驱动船舶控制技术的发展,本文在查阅有关资料的基础上,对欠驱动船舶数学模型、控制方法及其发展做了较为详细的综述,并对该领域存在的问题以及可能的发展方向进行了探讨。 如果把船舶作为一个刚体来研究,则船舶的运动有六个自由度,称之为横摇、纵摇、艏摇、横荡、纵荡和垂荡。考虑常规船舶水平面运动的控制,所关心的主要是船舶在水面上的位置和航向,而且就低重心的普通船舶而言,垂荡、纵摇和横摇对其水平面运动影响甚微,可以忽略。因此水面船舶的六自由度运动就可以简化为沿x方向前进、y方向横移及绕z轴旋转(艏摇)的三自由度运动。由于船舶的推进装置仅装备有螺旋桨推进器和船舵,也就是说系统只有2个控制输入(前向推力和旋转力矩),但需要同时控制船舶在水平面运动的3个自由度,因此对常规船舶平面运动的控制研究可归结为欠驱动控制问题。 上述的船舶的控制问题 ,船的质量和阻尼矩阵都假定为三角阵 ,船舶模型参数和环境干扰的不确定性也被忽略 ,都是在理想的条件下对船舶进行镇定Π跟踪控制。
心态决定考试成绩 教育杂谈 2013-05-29 19:34 心态决定考试成绩 瓦伦达是美国一个著名的高空走钢索表演者,在一次重大的表演中,不幸失足身亡。他的妻子事后说,我知道这一次一定要出事,因为他上场前总是不停地说,这次太重要了,不能失败,绝不能失败;而以前每次成功的表演,他只想着走钢索这件事本身,而不去管这件事可能带来的一切。后来,人们就把专心致志于做事本身而不去管这件事的意义,不患得患失的心态,叫做“瓦伦达心态”。 美国斯坦福大学的一项研究也表明,人大脑里的某一图像会像实际情况那样刺激人的神经系统。比如当一个高尔夫球手击球前一再告诉自己“不要把球打进水里”时,他的大脑里往往就会出现“球掉进水里”的情景,而结果往往事与愿违,这时候球大多都会掉进水里。这项研究从另一个方面证实了“瓦伦达心态”。 在大型考试前,同学们的心态有所不同,不同的心态会影响考试能力的发挥,继而影响考试成绩。 1.焦虑度适中对自己能力状态有很客观的评价,能面对压力,压力是自己学习的动力。考试的期望适中,知道竞争对手的实力和自己的实力,充分复习,迎接考试,通常考试能够发挥较好水平,每次的成绩都有所提高! 2.考试焦虑度过高一种情况是过去小学时学习成绩很好,现在成绩较好的重点班里,成绩相对比较低,名次落后,自我感觉竞争压力大,考试时总不能发挥出最好的水平。 调整方法心态决定一切,这种同学对自己没有自信,总感觉落后于竞争对手,其实他们最大的敌人是自己。如果总是在脑海里出现“我肯定考不好”,“万一考不好怎么办?”的念头,就会应验“瓦伦达效应”,考试结果就像你的消极暗示那样发生了。 以一颗平常心对待考试,不管考试这件事情的意义有多重要,专心于考试本身就行了,考试就是对我的学习能力的一次检验,努力发挥自己最好的水平,你的竞争对手就是你自己,不是别人。 另一种情况是成绩不稳定,总担心辜负老师、家长的期望,感觉学习压力较大,怕考不好无法向父母交代,考试有时发挥失常。