直插&定长程序
- 格式:doc
- 大小:36.00 KB
- 文档页数:8
单列直插式封装(SIP)SIP封装并无一定型态,就芯片的排列方式而言,SIP可为多芯片模块(Multi-chip Module;MCM)的平面式2D封装,也可再利用3D封装的结构,以有效缩减封装面积;而其内部接合技术可以是单纯的打线接合(Wire Bonding),亦可使用覆晶接合(Flip Chip),但也可二者混用。
除了2D与3D的封装结构外,另一种以多功能性基板整合组件的方式,也可纳入SIP的涵盖范围。
此技术主要是将不同组件内藏于多功能基板中,亦可视为是SIP的概念,达到功能整合的目的。
不同的芯片排列方式,与不同的内部接合技术搭配,使SIP的封装型态产生多样化的组合,并可依照客户或产品的需求加以客制化或弹性生产。
构成SIP技术的要素是封装载体与组装工艺。
前者包括PCB,LTCC,Silicon Submount(其本身也可以是一块IC)。
后者包括传统封装工艺(Wirebond和Flip Chip)和SMT设备。
无源器件是SIP的一个重要组成部分,其中一些可以与载体集成为一体(Embedded,MCM-D等),另一些(精度高、Q值高、数值高的电感、电容等)通过SMT组装在载体上。
SIP的主流封装形式是BGA。
就目前的技术状况看,SIP 本身没有特殊的工艺或材料。
这并不是说具备传统先进封装技术就掌握了SIP技术。
由于SIP的产业模式不再是单一的代工,模块划分和电路设计是另外的重要因素。
模块划分是指从电子设备中分离出一块功能,既便于后续的整机集成又便于SIP封装。
电路设计要考虑模块内部的细节、模块与外部的关系、信号的完整性(延迟、分布、噪声等)。
随着模块复杂度的增加和工作频率(时钟频率或载波频率)的提高,系统设计的难度会不断增加,导致产品开发的多次反复和费用的上升,除设计经验外,系统性能的数值仿真必须参与设计过程。
与在印刷电路板上进行系统集成相比,SIP能最大限度地优化系统性能、避免重复封装、缩短开发周期、降低成本、提高集成度。
1 双列直插封装(DIP)20世纪60年代,由于IC集成度的提高,电路引脚数不断增加,有了数十个I/O引脚的中、小规模集成电路(MSI、SSI),相应的封装形式为双列直插(DIP)型,并成为那个时期的主导产品形式。
70年代,芯片封装流行的是双列直插封装(DIP)、单列直插封装(SIP)、针栅阵列封装(PGA)等都属于通孔插装式安装器件。
通孔插装式安装器件的代表当属双列直插封装,简称DIP(Dualln-LinePa ckage)。
这类DIP从封装结构形式上可以分为两种:其一,军品或要求气密封装的采用陶瓷双例直插DIP;其二,由于塑料封装具有低成本、性价比优越等特点,因此,封装形式大多数采用塑料直插式PD IP。
塑料双便直插封装(PDIP)是上世纪80年代普遍使用的封装形式,它有一个矩形的塑封体,在矩形塑封体比较长的两侧面有双列管脚,两相邻管脚之间的节距是2.54mm,引线数为6-84,厚度约为2.0~3.6,如表2所示。
两边平等排列管脚的跨距较大,它的直插式管脚结构使塑封电路可以装在塑料管内运输,不用接触管脚,管脚从塑封体两面弯曲一个小角度用于插孔式安装,也便于测试或器件的升级和更换。
这种封装形式,比较适合印制电路板(PCB)的穿孔安装,具有比50年代的TO型圆形金属封装,更易于对PC B布线以及操作较为方便等特点。
这种封装适合于大批量低成本生产,便于自动化的线路板安装及提供高的可靠性焊接。
同时,塑料封装器件在尺寸、重量、性能、成本、可靠性及实用性方面也优于气密性封装。
大部分塑封器件重量大约只是陶瓷封装的一半。
例如:14脚双列直插封装(DIP)重量大约为1g,而14脚陶瓷封装重2g。
但是双列直插封装(DIP)效率较低,大约只有2%,并占去了大量有效安装面积。
清亮直插式太阳能热水器工艺技术方案一、产品介绍太阳能热水器把太阳光能转化为热能,将水从低温度加热到高温度,以满足人们在生活、生产中的热水使用。
太阳能热水器是由集热器、储水箱及相关附件组成,把太阳能转换成热能主要依靠集热管。
集热器受阳光照射面温度高,集热管背阳面温度低,而管内水便产生温差反应,利用热水上浮冷水下沉的原理,使水产生微循环而达到所需热水。
1、太阳能热水器的工作原理①吸热过程太阳辐射透过玻璃盖板,被集热板吸收后沿肋片和管壁传递到吸热管内的水。
吸热管内的水吸热后温度升高,比重减小而上升,形成一个向上的动力,构成一个热虹吸系统。
随着热水的不断上移并储存在储水箱上部,同时通过下循环管不断补充温度较低的水,如此循环往复,最终整箱水都升高至一定的温度。
现有的平板式集热器,基本上都采用结合良好的多管组合方式,如滚压或压延方法等,其中走水管子与吸热板之间的热阻几乎可以忽略。
影响平板式集热器板芯性能的主要因素,一是结构设计,二是表面吸收涂层。
设计良好的集热器的板芯肋片效率应该在93%以上。
集热器的板芯肋片效率与板芯结构、表面处理以及集热器整体结构有关。
集热器整体结构的影响可以用总传热系数来描述,其影响程度与自身的几何尺寸(肋片厚度、材质)是一样。
也就是说,在同等效率的情况下,集热器热损小时板芯可以薄一些。
选择性吸收表面可以提高集热效率,但是市面上这类产品为了提高经济效益,往往肋片较薄。
用于热水器场合时,这类产品的实际集热效果与选择性差一些(甚至没有选择性)但肋片厚一些的集热器不会有太大的区别。
②循环管路家用太阳能热水器通常按自然循环方式工作,没有外在的动力,设计良好的系统只要有5~6℃以上的温差就可以循环很好。
水循环管路管径及管路分布的合理性直接影响到集热器的热交换效率。
多数情况下,自然循环家用热水器系统管路中的流态都可以视为层流。
集热器内管路系统的阻力主要来自沿程阻力,局部阻力的影响要小得多,其中支管的沿程阻力又比主管要大得多。
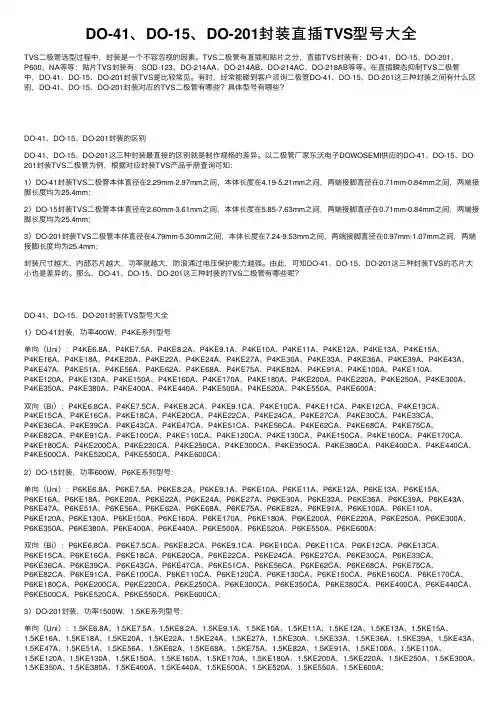
DO-41、DO-15、DO-201封装直插TVS型号⼤全TVS⼆极管选型过程中,封装是⼀个不容忽视的因素。
TVS⼆极管有直插和贴⽚之分,直插TVS封装有:DO-41、DO-15、DO-201、P600、NA等等;贴⽚TVS封装有:SOD-123、DO-214AA、DO-214AB、DO-214AC、DO-218AB等等。
在直插瞬态抑制TVS⼆极管中,DO-41、DO-15、DO-201封装TVS是⽐较常见。
有时,经常能碰到客户咨询⼆极管DO-41、DO-15、DO-201这三种封装之间有什么区别,DO-41、DO-15、DO-201封装对应的TVS⼆极管有哪些?具体型号有哪些?DO-41、DO-15、DO-201封装的区别DO-41、DO-15、DO-201这三种封装最直接的区别就是制作规格的差异。
以⼆极管⼚家东沃电⼦DOWOSEMI供应的DO-41、DO-15、DO-201封装TVS⼆极管为例,根据对应封装TVS产品⼿册查询可知:1)DO-41封装TVS⼆极管本体直径在2.29mm-2.97mm之间,本体长度在4.19-5.21mm之间,两端接脚直径在0.71mm-0.84mm之间,两端接脚长度均为25.4mm;2)DO-15封装TVS⼆极管本体直径在2.60mm-3.61mm之间,本体长度在5.85-7.63mm之间,两端接脚直径在0.71mm-0.84mm之间,两端接脚长度均为25.4mm;3)DO-201封装TVS⼆极管本体直径在4.79mm-5.30mm之间,本体长度在7.24-9.53mm之间,两端接脚直径在0.97mm-1.07mm之间,两端接脚长度均为25.4mm;封装尺⼨越⼤、内部芯⽚越⼤,功率就越⼤,防浪涌过电压保护能⼒越强。
由此,可知DO-41、DO-15、DO-201这三种封装TVS的芯⽚⼤⼩也是差异的。
那么,DO-41、DO-15、DO-201这三种封装的TVS⼆极管有哪些呢?DO-41、DO-15、DO-201封装TVS型号⼤全1)DO-41封装,功率400W,P4KE系列型号单向(Uni):P4KE6.8A、P4KE7.5A、P4KE8.2A、P4KE9.1A、P4KE10A、P4KE11A、P4KE12A、P4KE13A、P4KE15A、P4KE16A、P4KE18A、P4KE20A、P4KE22A、P4KE24A、P4KE27A、P4KE30A、P4KE33A、P4KE36A、P4KE39A、P4KE43A、P4KE47A、P4KE51A、P4KE56A、P4KE62A、P4KE68A、P4KE75A、P4KE82A、P4KE91A、P4KE100A、P4KE110A、P4KE120A、P4KE130A、P4KE150A、P4KE160A、P4KE170A、P4KE180A、P4KE200A、P4KE220A、P4KE250A、P4KE300A、P4KE350A、P4KE380A、P4KE400A、P4KE440A、P4KE500A、P4KE520A、P4KE550A、P4KE600A;双向(Bi):P4KE6.8CA、P4KE7.5CA、P4KE8.2CA、P4KE9.1CA、P4KE10CA、P4KE11CA、P4KE12CA、P4KE13CA、P4KE15CA、P4KE16CA、P4KE18CA、P4KE20CA、P4KE22CA、P4KE24CA、P4KE27CA、P4KE30CA、P4KE33CA、P4KE36CA、P4KE39CA、P4KE43CA、P4KE47CA、P4KE51CA、P4KE56CA、P4KE62CA、P4KE68CA、P4KE75CA、P4KE82CA、P4KE91CA、P4KE100CA、P4KE110CA、P4KE120CA、P4KE130CA、P4KE150CA、P4KE160CA、P4KE170CA、P4KE180CA、P4KE200CA、P4KE220CA、P4KE250CA、P4KE300CA、P4KE350CA、P4KE380CA、P4KE400CA、P4KE440CA、P4KE500CA、P4KE520CA、P4KE550CA、P4KE600CA;2)DO-15封装,功率600W,P6KE系列型号:单向(Uni):P6KE6.8A、P6KE7.5A、P6KE8.2A、P6KE9.1A、P6KE10A、P6KE11A、P6KE12A、P6KE13A、P6KE15A、P6KE16A、P6KE18A、P6KE20A、P6KE22A、P6KE24A、P6KE27A、P6KE30A、P6KE33A、P6KE36A、P6KE39A、P6KE43A、P6KE47A、P6KE51A、P6KE56A、P6KE62A、P6KE68A、P6KE75A、P6KE82A、P6KE91A、P6KE100A、P6KE110A、P6KE120A、P6KE130A、P6KE150A、P6KE160A、P6KE170A、P6KE180A、P6KE200A、P6KE220A、P6KE250A、P6KE300A、P6KE350A、P6KE380A、P6KE400A、P6KE440A、P6KE500A、P6KE520A、P6KE550A、P6KE600A;双向(Bi):P6KE6.8CA、P6KE7.5CA、P6KE8.2CA、P6KE9.1CA、P6KE10CA、P6KE11CA、P6KE12CA、P6KE13CA、P6KE15CA、P6KE16CA、P6KE18CA、P6KE20CA、P6KE22CA、P6KE24CA、P6KE27CA、P6KE30CA、P6KE33CA、P6KE36CA、P6KE39CA、P6KE43CA、P6KE47CA、P6KE51CA、P6KE56CA、P6KE62CA、P6KE68CA、P6KE75CA、P6KE82CA、P6KE91CA、P6KE100CA、P6KE110CA、P6KE120CA、P6KE130CA、P6KE150CA、P6KE160CA、P6KE170CA、P6KE180CA、P6KE200CA、P6KE220CA、P6KE250CA、P6KE300CA、P6KE350CA、P6KE380CA、P6KE400CA、P6KE440CA、P6KE500CA、P6KE520CA、P6KE550CA、P6KE600CA;3)DO-201封装,功率1500W,1.5KE系列型号:单向(Uni):1.5KE6.8A、1.5KE7.5A、1.5KE8.2A、1.5KE9.1A、1.5KE10A、1.5KE11A、1.5KE12A、1.5KE13A、1.5KE15A、1.5KE16A、1.5KE18A、1.5KE20A、1.5KE22A、1.5KE24A、1.5KE27A、1.5KE30A、1.5KE33A、1.5KE36A、1.5KE39A、1.5KE43A、1.5KE47A、1.5KE51A、1.5KE56A、1.5KE62A、1.5KE68A、1.5KE75A、1.5KE82A、1.5KE91A、1.5KE100A、1.5KE110A、1.5KE120A、1.5KE130A、1.5KE150A、1.5KE160A、1.5KE170A、1.5KE180A、1.5KE200A、1.5KE220A、1.5KE250A、1.5KE300A、1.5KE350A、1.5KE380A、1.5KE400A、1.5KE440A、1.5KE500A、1.5KE520A、1.5KE550A、1.5KE600A;双向(Bi):1.5KE6.8CA、1.5KE7.5CA、1.5KE8.2CA、1.5KE9.1CA、1.5KE10CA、1.5KE11CA、1.5KE12CA、1.5KE13CA、1.5KE15CA、1.5KE16CA、1.5KE18CA、1.5KE20CA、1.5KE22CA、1.5KE24CA、1.5KE27CA、1.5KE30CA、1.5KE33CA、1.5KE36CA、1.5KE39CA、1.5KE43CA、1.5KE47CA、1.5KE51CA、1.5KE56CA、1.5KE62CA、1.5KE68CA、1.5KE75CA、1.5KE82CA、1.5KE91CA、1.5KE100CA、1.5KE110CA、1.5KE120CA、1.5KE130CA、1.5KE150CA、1.5KE160CA、1.5KE170CA、1.5KE180CA、1.5KE200CA、1.5KE220CA、1.5KE250CA、1.5KE300CA、1.5KE350CA、1.5KE380CA、1.5KE400CA、1.5KE440CA、1.5KE500CA、1.5KE520CA、1.5KE550CA、1.5KE600CA;具体TVS⼆极管参数,详见对应型号产品⼿册!。

一、概述GWKD系列控制器是集压力测量,显示,输出、控制于一体的智能数显压力/液位测控产品。
该产品为全电子结构,前端采用带隔离膜充油压阻式压力传感器,由高精度的A/D转换,经微处理器运算处理,现场显示,并输出一路模拟量和两路开关量。
该智能液位控制器使用灵活,操作简单,调试容易,安全可靠。
广泛应用于水电,自来水,石油,化工,机械,液压等行业,对流体介质的压力进行现场测量显示和控制二、特点◆100标准仪表安装◆4位LED数码管显示,无视值误差.◆两路控制点继电器输出220V3A◆4~20mA标准信号输出(可选)◆控制点现场设定。
◆供电电源可选24VDC 220VACGWKD使用说明书直插式智能液位控制器西安蓝田恒远水电设备有限公司五、安装5.1机械连接:GWKD可以通过压力管接头(M20*1.5)(其他尺寸接头可在订货时说明)直接装在液压管路上,或者通过液位探头直接测量液位深度。
在关键应用场合(如剧烈震动或冲击),压力管接头可以通过微型软管进行机械解耦。
注:量程小于100KPa时必须垂直安装.5.2电气连接I OUT+I OUT-一限二限 电源为了防止电磁干扰的影响应注意以下事项:●线路连接尽量短●采用屏蔽线●尽量避免直接接近引起干扰的用户装置或电器和电子装置的接线●若用微型软管安装,壳体必须单独接地六、设置功能例:要设定开关点1为上限报警输出(常开功能)在4Mpa 吸和,小于3.95Mpa断开,;开关点2为下限报警输出(常闭功能)在10Mpa断开,低于9.95Mpa吸和:进入菜单:设定AL1H=4.00 AL1F=3.95AL2H=9.95 AL1F=10.00●按下“SET”键●显示“LOCK”(提示输入密码)●按▲或▼键输入密码“1”,●按下“SET”键确认●按▲或▼键上翻或下翻进行菜单选择(AL1H、AL1F、AL2H、AL2F、END)●按下“SET”键进入所选菜单。
●按▲或▼键更改设置●按下“SET”键确认,若需要,再用▲或▼键选择其他菜单进行修改。
雷泰DMC1480控制卡编程示例之四'' 主要演示功能: 直线插补'' 关键函数:' 多轴直线函数' d1000_start_t_line //相对' d1000_start_ta_line //绝对'' 注意事项:' DMC1000B不包含圆弧插补'' Writen by LEISAI-SUPPORT' FAX: 0755 - 26402718' TEL: 0755 - 26434329' EMAIL: support@ ' HTTP: '********************************************'定义四个轴的常量Const XCH As Integer = 0Const YCH As Integer = 1Const ZCH As Integer = 2Const UCH As Integer = 3Private Sub Command_Clear_Click()For i = 0 To 4d1000_set_command_pos i, 0NextEnd Sub'自定义子函数Private Function GetAxisPosi%(ByRef AxisArray() As Integer, ByRef posiArray() As Long)Dim n As Integern = 0If Check_X = 1 ThenAxisArray(n) = XCHposiArray(n) = Val(Text_X.Text)n = n + 1End IfIf Check_Y = 1 ThenAxisArray(n) = YCHposiArray(n) = Val(Text_Y.Text)n = n + 1End IfIf Check_Z = 1 ThenAxisArray(n) = ZCHposiArray(n) = Val(Text_Z.Text)n = n + 1End IfIf Check_U = 1 ThenAxisArray(n) = UCHposiArray(n) = Val(Text_U.Text)n = n + 1End IfGetAxisPosi% = nEnd FunctionPrivate Sub Command_Run_Click()Dim nStart, nMSpeed As LongDim fAccel As DoubleDim nNum As IntegerDim AxisArray(4) As IntegerDim posiArray(4) As LongnNum = GetAxisPosi(AxisArray, posiArray)If nNum < 2 ThenMsgBox "插补不能少于两个轴!", vbOKOnly, "提示"Exit SubEnd IfnStart = Val(Text_Start.Text)nMSpeed = Val(Text_MSpeed.Text)fAccel = Val(Text_TAcc.Text)Text_Num.Text = Str(nNum)d1000_start_t_line nNum, AxisArray(0), posiArray(0), nStart, nMSpeed, fAccelEnd SubPrivate Sub Command_Stop_Click()If d1000_check_done(XCH)=0 Or d1000_check_done(YCH) = 0 Ord1000_check_done(ZCH) = 0 Or d1000_check_done(UCH) = 0 Then '在运行d1000_decel_stop (XCH)d1000_decel_stop (YCH)d1000_decel_stop (ZCH)d1000_decel_stop (UCH)End IfEnd SubPrivate Sub Form_Load()Dim nCard As IntegernCard = d1000_board_init()If nCard < 1 Then '控制卡初始化MsgBox "未找到控制卡!", vbOKOnly, "警告"End IfEnd SubPrivate Sub Form_Unload(Cancel As Integer)d1000_board_closeEnd SubPrivate Sub Timer1_Timer()Label_Pos.Caption = " 位置:" + Str(d1000_get_command_pos(XCH))Label_Pos.Caption = Label_Pos.Caption + "," + Str(d1000_get_command_pos(YCH)) Label_Pos.Caption = Label_Pos.Caption + "," + Str(d1000_get_command_pos(ZCH)) Label_Pos.Caption = Label_Pos.Caption + "," + Str(d1000_get_command_pos(UCH))End Sub' 雷泰DMC1480控制卡编程示例之三'' 主要演示功能:' 1. 控制卡的基本操作' 2. 单轴驱动脉冲,驱动模式' 3. T形和S形速度曲线选择' 4. 减速或急停控制,外部减速停' 5. 位置显示,位置清零及指定轴状态显示' 6. 定长运动和连续运动选择'' 关键函数:' 1. 控制卡的基本操作函数' d1000_board_init , d1000_board_close' 2. 单轴驱动,T形及S形选择' d1000_set_pls_outmode 脉冲设置' d1000_start_tv_move 梯形曲线单轴连续运动' d1000_start_sv_move S形曲线单轴连续运动' d1000_start_ta_move 梯形曲线单轴绝对坐标点位运动' d1000_start_sa_move S形曲线单轴绝对坐标点位运动' 3. 减速或急停' d1000_decel_stop 当减速时间为0时为急停' 4. 位置显示及状态显示' d1000_get_abs_position' d1000_set_position' d1000_check_done' d1000_get_axis_status'' 注意事项:' 本例虽然只提供了四个驱动函数,实质上其它驱动函数都一致'' Writen by LEISAI-SUPPORT' FAX: 0755 - 26402718' TEL: 0755 - 26434329' EMAIL: support@ ' HTTP: '********************************************'定义四个轴的常量Const XCH As Integer = 0Const YCH As Integer = 1Const ZCH As Integer = 2Const UCH As Integer = 3Dim nAxis As Integer '选择的驱动轴Dim nSpeed As Integer 'S形或T形选择Dim nMove As Integer '定长或连续选择Private Sub Check_Dir_Click()UpdateControlEnd SubPrivate Sub Check_PLog_Click()UpdateControlEnd SubPrivate Sub Check_PMode_Click()UpdateControlEnd SubPrivate Sub Check_SD_Click()UpdateControlEnd SubPrivate Sub Command_Clear_Click()For i = 0 To 4d1000_set_command_pos i, 0NextEnd SubPrivate Sub Command_Run_Click()Dim nStart, nMSpeed, nPulse As LongDim fAccel As DoubleDim nDir As IntegerIf d1000_check_done(nAxis) = 0 Then '若在运行,则返回Exit SubEnd IfnStart = Val(Text_Start.Text)nMSpeed = Val(Text_MSpeed.Text)fAccel = Val(Text_TAcc.Text)nPulse = Val(Text_Pulse.Text)If Check_Dir = 1 ThennDir = 1ElsenDir = -1End IfIf Check_SD = 1 Thend1000_set_sd nAxis, 1Elsed1000_set_sd nAxis, 0End IfIf Check_PMode = 1 ThenIf Check_PLog = 1 Thend1000_set_pls_outmode nAxis, 1 'pulse/dir 模式,脉冲下降沿有效Elsed1000_set_pls_outmode nAxis, 0 'pulse/dir 模式,脉冲上升沿有效End IfElseIf Check_PLog = 1 Thend1000_set_pls_outmode nAxis, 3 'CW/CCW模式,脉冲下降沿有效Elsed1000_set_pls_outmode nAxis, 2 'CW/CCW模式,脉冲上升沿有效End IfEnd IfIf nMove = 0 Then '定长If nSpeed = 0 Then 'S形d1000_start_s_move nAxis, nPulse * nDir, nStart, nMSpeed, fAccelElsed1000_start_t_move nAxis, nPulse * nDir, nStart, nMSpeed, fAccelEnd IfElse '连续If nSpeed = 0 Then 'S形d1000_start_sv_move nAxis, nStart, nMSpeed * nDir, fAccelElsed1000_start_tv_move nAxis, nStart, nMSpeed * nDir, fAccelEnd IfEnd IfEnd SubPrivate Sub Command_Stop_Click()If d1000_check_done(XCH) = 0 Or d1000_check_done(YCH) = 0 Or d1000_check_done(ZCH) = 0 Or d1000_check_done(UCH) = 0 Then '在运行d1000_decel_stop (XCH)d1000_decel_stop (YCH)d1000_decel_stop (ZCH)d1000_decel_stop (UCH)End IfEnd SubPrivate Sub Form_Load()Dim nCard As IntegernCard = d1000_board_init()If nCard < 1 Then '控制卡初始化MsgBox "未找到控制卡!", vbOKOnly, "警告"End IfCheck_PMode = 1Check_PLog = 1Check_Dir = 1Check_SD = 1UpdateControlEnd SubPrivate Sub Form_Unload(Cancel As Integer)d1000_board_closeEnd SubPublic Sub UpdateControl()If Check_PMode = 1 ThenCheck_PMode.Caption = "脉冲+方向"ElseCheck_PMode.Caption = "脉冲+脉冲"End IfIf Check_PLog = 1 ThenCheck_PLog.Caption = "脉冲下降沿有效"ElseCheck_PLog.Caption = "脉冲上升沿有效"End IfIf Check_SD = 1 ThenCheck_SD.Caption = "减速:使能"ElseCheck_SD.Caption = "减速:禁止"End IfIf Check_Dir = 1 ThenCheck_Dir.Caption = "驱动方向:正"ElseCheck_Dir.Caption = "驱动方向:负"End IfEnd SubPrivate Sub Option_CM_Click()nMove = 1End SubPrivate Sub Option_M_Click()nMove = 0End SubPrivate Sub Option_S_Click()nSpeed = 0End SubPrivate Sub Option_T_Click()nSpeed = 1End SubPrivate Sub Option_U_Click()nAxis = UCHEnd SubPrivate Sub Option_X_Click()nAxis = XCHEnd SubPrivate Sub Option_Y_Click()nAxis = YCHEnd SubPrivate Sub Option_Z_Click()nAxis = ZCHEnd SubPrivate Sub Timer1_Timer()Label_Pos.Caption = "状态:" + Str(d1000_get_axis_status(XCH))Label_Pos.Caption = Label_Pos.Caption + "," + Str(d1000_get_axis_status(YCH))Label_Pos.Caption = Label_Pos.Caption + "," + Str(d1000_get_axis_status(ZCH))Label_Pos.Caption = Label_Pos.Caption + "," + Str(d1000_get_axis_status(UCH))Label_Pos.Caption = Label_Pos.Caption + " 位置:" + Str(d1000_get_command_pos(XCH)) Label_Pos.Caption = Label_Pos.Caption + "," + Str(d1000_get_command_pos(YCH))Label_Pos.Caption = Label_Pos.Caption + "," + Str(d1000_get_command_pos(ZCH))Label_Pos.Caption = Label_Pos.Caption + "," + Str(d1000_get_command_pos(UCH))End Sub。