嵌入式系统原理与设计实验报告
- 格式:doc
- 大小:676.00 KB
- 文档页数:22
嵌⼊式系统原理及应⽤实验报告嵌⼊式系统原理及应⽤1、实验⽬的练习ARM汇编语⾔程序设计。
2、实验环境PC个⼈计算机、Windows XP操作系统、ADS1.2集成开发环境软件。
3、实验要求⽤ARM指令集设计⼀段汇编语⾔程序,完成两个64位⼆进制数的乘法运算,两个乘数分别放在r1、r0和r3、r2中(r1和r3放⾼位字),结果存在r7、r6、r5、r4中。
4实验原理及基本技术线路图ARM的乘法指令把⼀对寄存器的内容相乘,然后根据指令类型把结果累加到其它的寄存器。
长整形的“乘累加”要使⽤代表64位的⼀对寄存器,最终的结果放在⼀个⽬标寄存器或者⼀对寄存器中。
乘法指令的语法:MLA {}{S} Rd,Rm,Rs,RnMUL{}{S} Rd,Rm,RsMLA 乘累加Rd=(Rm×Rs)+RnMUL 乘法Rd=Rm×Rs{}{S} RdLo,RdHi,Rm,RsSMLAL 长整型有符号乘累加[RdHi,RdLo]=[RdHi,RdLo]+(Rm×Rs)SMULL 长整型有符号乘法[RdHi,RdLo]=Rm×RsUMLAL 长整型⽆符号乘累加[RdHi,RdLo]=[RdHi,RdLo]+(Rm×Rs)UMULL 长整型⽆符号乘法[RdHi,RdLo]=Rm×Rs长整型乘法指令产⽣64位的结果。
由于结果太⼤,不能存放在⼀个32位寄存器,所以把结果存放在2个32位的寄存器RdLo和RdHi中。
RdLo存放低32位,RdHi存放⾼32位。
利⽤UMULL和SUMLL指令可以进⾏32位宽度的⽆符号或有符号的整数乘法运算,得到64位的结果。
在实际应⽤中,有许多需要长整型乘法运算的应⽤。
例如,处理C中long long整型算术运算等。
对于64位整数乘法运算可利⽤如下页图所⽰的扩展⽅法来实现。
其中:R0,R1分别存放被乘数的低32位和⾼32位;R2,R3分别存放乘数的低32位和⾼32位;128位结果由低到⾼依次存放在R4,R5,R6,R7中。
嵌入式系统实验报告引言嵌入式系统作为一种广泛应用于各行各业的计算机系统,其本身具有一定的难度与挑战。
本实验报告将围绕嵌入式系统的设计、开发以及应用展开讨论,旨在总结并分享在实验中所获得的经验与知识。
一. 实验背景嵌入式系统是指以特定功能为目标的计算机系统,其设计与开发过程相较于传统的计算机系统更为复杂和精细。
本次实验的主要目标是通过设计一个基于嵌入式系统的智能家居控制器,来探索嵌入式系统的应用与实践。
二. 实验内容2.1 硬件设计嵌入式系统的硬件设计是整个实验的基础,其合理性与稳定性直接影响系统的性能和可靠性。
在本次实验中,我们选择了一块主频为xx的处理器作为核心,配备了丰富的外设接口,如GPIO、串口等。
我们还为系统增加了一块液晶显示屏和一组按键,以实现简单的用户交互。
2.2 软件开发在硬件设计完成后,我们开始进行软件开发。
首先,我们需要选择一个合适的操作系统作为嵌入式系统的基础。
针对本次实验,我们选择了xx操作系统,其具备较强的实时性和稳定性,能够满足我们对系统性能的要求。
接着,我们进行了嵌入式系统的驱动程序开发。
通过编写各个外设的驱动程序,我们实现了与液晶显示屏和按键的交互,并将其与处理器进行了适当的接口配置。
另外,我们还开发了嵌入式系统的应用程序。
通过编写智能家居控制器的代码,我们成功实现了对家居设备的远程控制和监测。
用户可以通过液晶显示屏和按键进行交互,实现对家居设备的开关、调节和状态查看等操作。
三. 实验结果与分析经过实验测试,我们发现嵌入式系统在智能家居领域的应用具有较高的可行性与实用性。
通过嵌入式系统的控制,用户可以方便地实现对家居设备的远程操控,提升了家居智能化的程度。
同时,嵌入式系统的实时性和稳定性使得智能家居控制器具备了较高的安全性和可靠性。
然而,在实验过程中我们也遇到了一些挑战。
其中,系统的驱动程序开发是较为复杂的一环,需要仔细理解硬件接口和协议,并进行合理的配置。
此外,系统的稳定性和功耗管理也是需要重点关注的问题。
嵌入式系统设计性实验报告本次实验的目标是设计一个能够追踪并控制智能小车运动的嵌入式系统。
具体来说,我们需要设计一套硬件电路和相应的软件程序,使得小车能够通过传感器感知周围环境,并通过控制器控制电机的转动实现运动。
实验中使用了Arduino开发板作为嵌入式系统的核心。
Arduino开发板集成了一个微控制器和一系列输入输出接口,可以通过编写简单的代码控制各种外设。
在本次实验中,我们使用了超声波传感器作为感知器,直流电机作为执行器。
首先,我们需要连接硬件电路。
超声波传感器负责感知周围环境,通过发送超声波脉冲并接收回弹的信号来计算距离。
直流电机则负责控制小车的运动,根据软件的控制信号,控制电机的转速和方向。
在连接硬件电路时需要注意电路的正确连接,以免出现短路或其他损坏。
接下来,我们需要编写软件程序。
首先,我们需要初始化传感器和电机的接口,并设置合适的参数。
然后,在主循环中,我们不断地读取传感器的数值,并根据读取到的数值进行相应的处理。
比如,当距离超过一定阈值时,我们可以控制电机停止运动;当距离小于阈值时,我们可以控制电机朝一些方向运动。
除了距离的处理,我们还可以根据需要处理其他的传感器读数,比如温度、压力等。
最后,当实验结束时,我们需要关闭接口并释放相应的资源。
经过实验,我们成功地设计并实现了一个能够追踪并控制智能小车运动的嵌入式系统。
实验结果表明,我们的系统可以准确地感知周围环境,并根据环境的变化来控制小车的运动。
系统的性能良好,响应速度较快,可以在实际应用中发挥较好的作用。
总结而言,本次实验通过设计一个能够追踪并控制智能小车运动的嵌入式系统,使我们对嵌入式系统设计有了更深入的认识。
通过实验,我们熟悉了嵌入式系统的硬件电路和软件程序的设计过程,提高了对嵌入式系统设计的理解和实践能力。
此外,我们还深刻认识到嵌入式系统在实际应用中的广泛性和重要性。
希望通过今后进一步的学习和实践,能够在嵌入式系统设计领域取得更好的成绩。
实验指导书(实验)课程名称:基于STM32的嵌入式系统设计实验实验一电路板焊接与调试-•实验简介完成实验板上部分兀件的焊接,焊接完成后进行基本测试。
实验目的及原理掌握STM32F103实验板的基本原理,掌握焊接电路板的基本技能,掌握下载测试程序的基本方法。
原理:详细内容参考教材《基于STM32的嵌入式系统原理与设计》MCU和周边电路如图为MCU及其周边电路。
图1 MCU及其周边电路1. 唤醒电路,高有效,不按时接220K 电阻下拉。
2. 复位电路,低有效。
带RC 启动复位。
3. 配置启动,用跳线选择B00T1和BOOTO 接高电平或低电平。
4. 高速晶振电路,采用8M 晶振,在STM32内部倍频为72M 。
5. AD 参考电路,采用LC 滤波,可跳线选择直接接VCC 或通过TL431稳压电路产生的参考电压。
6. 后备电池。
可通过跳线选择直接接VCC 或电池。
7. AD 输入,可选择使用RC 滤波,共8路。
&低速晶振电路,选用32. 768kHz 晶振,为产生准确的串口波特率。
USB 转串口电路USB 转串口电路可以方便没有串口的笔记本电脑用户通过USB 接口下载代码到FLASH 中,及进行RS232串行通信。
USB 转串口芯片是CP2102,该芯片稳定性较好。
当其正常工作的时候,灯LED6亮。
该 芯片DP/D+引脚连MINI USB 接口的脚3, DM/D-引脚连MINI USB 接口的脚2,为一对USB 输入输出线。
TXD 与 RXD 引脚接 MCU 的 PA10 (USART1_RX)和 PA9 (USART1_TX)。
I2C 接口电路Jusbm USB图2 USB 转串口接口电路14NCNCNCNCNCNCNCONS.LO(一XE- (一ON 二 N (INHdsfls 二N 二一二乂ON本书选择的EEPROM 是AT24C02是256字节的电可擦出PROM,通过I2C 协议与STM32 进行通信,连接十分简单。
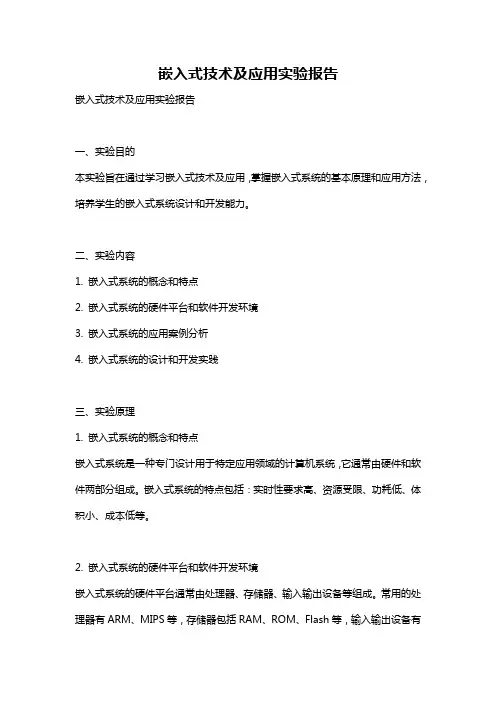
嵌入式报告实验报告1. 引言嵌入式系统作为一种特殊的计算机系统,应用广泛且日益重要。
嵌入式报告实验是对嵌入式系统进行实际操作和测试的过程,旨在验证嵌入式系统的功能和性能,以评估其是否满足设计要求。
本报告将详细介绍嵌入式报告实验的设计与实施,并对实验结果进行分析与总结。
2. 实验设计2.1 实验目的嵌入式报告实验的目的是通过设计和实施一系列测试来评估嵌入式系统的性能和功能。
具体目标包括但不限于:验证系统的实时性、稳定性和可靠性;测试系统的各种输入输出功能;评估系统对异常情况的处理能力。
2.2 实验环境实验使用的嵌入式系统硬件为XX处理器,集成了XX模块和XX接口。
软件方面,使用XX嵌入式操作系统和XX开发工具进行系统开发和测试。
2.3 实验步骤1) 配置硬件环境:将嵌入式系统与外部设备连接,确保硬件环境正常。
2) 编写测试程序:根据实验目标,编写相应的测试程序,包括输入输出测试、性能测试和异常情况测试等。
3) 软件调试:通过软件调试工具对测试程序进行调试,确保程序逻辑正确。
4) 硬件调试:通过硬件调试工具对嵌入式系统进行调试,确保硬件模块正常工作。
5) 实验运行:将测试程序下载到嵌入式系统中,运行测试程序并记录实验数据。
6) 数据分析与总结:对实验数据进行分析和总结,评估嵌入式系统的性能和功能是否满足设计要求。
3. 实验结果与分析3.1 输入输出测试通过设计一系列输入输出测试用例,测试嵌入式系统的输入输出功能。
测试包括但不限于:按键输入、传感器数据采集、外部设备通信等。
实验结果表明,嵌入式系统的输入输出功能正常,能够准确获取和处理各种输入信号,并成功输出相应的结果。
3.2 性能测试通过设计一系列性能测试用例,测试嵌入式系统的处理能力和实时性。
测试包括但不限于:任务切换速度、响应时间、系统负载等。
实验结果表明,嵌入式系统具有较高的处理能力和实时性,能够快速响应各种任务并保持系统的稳定性。
3.3 异常情况测试通过设计一系列异常情况测试用例,测试嵌入式系统对异常情况的处理能力。
嵌入式技术及应用实验报告嵌入式技术及应用实验报告一、实验目的本实验旨在通过学习嵌入式技术及应用,掌握嵌入式系统的基本原理和应用方法,培养学生的嵌入式系统设计和开发能力。
二、实验内容1. 嵌入式系统的概念和特点2. 嵌入式系统的硬件平台和软件开发环境3. 嵌入式系统的应用案例分析4. 嵌入式系统的设计和开发实践三、实验原理1. 嵌入式系统的概念和特点嵌入式系统是一种专门设计用于特定应用领域的计算机系统,它通常由硬件和软件两部分组成。
嵌入式系统的特点包括:实时性要求高、资源受限、功耗低、体积小、成本低等。
2. 嵌入式系统的硬件平台和软件开发环境嵌入式系统的硬件平台通常由处理器、存储器、输入输出设备等组成。
常用的处理器有ARM、MIPS等,存储器包括RAM、ROM、Flash等,输入输出设备有键盘、显示器、传感器等。
嵌入式系统的软件开发环境包括编译器、调试器、仿真器等工具。
3. 嵌入式系统的应用案例分析嵌入式系统广泛应用于各个领域,如智能手机、汽车电子、医疗设备、工业控制等。
以智能手机为例,它是一种集成了通信、计算、娱乐等功能的嵌入式系统,通过操作系统和应用软件实现各种功能。
4. 嵌入式系统的设计和开发实践嵌入式系统的设计和开发包括硬件设计和软件开发两个方面。
硬件设计主要包括电路设计、PCB设计等,软件开发主要包括驱动程序开发、应用程序开发等。
在设计和开发过程中,需要考虑系统的性能、可靠性、安全性等因素。
四、实验步骤1. 学习嵌入式系统的概念和特点,了解嵌入式系统的基本原理。
2. 学习嵌入式系统的硬件平台和软件开发环境,掌握常用的处理器、存储器和输入输出设备。
3. 分析嵌入式系统的应用案例,了解不同领域的嵌入式系统的设计和开发方法。
4. 进行嵌入式系统的设计和开发实践,包括硬件设计和软件开发两个方面。
5. 调试和测试嵌入式系统,验证系统的功能和性能。
6. 总结实验结果,撰写实验报告。
五、实验结果与分析通过本次实验,我对嵌入式系统的概念和特点有了更深入的了解。
一、设计题目选择本次嵌入式实训题目为“嵌入式系统设计”,旨在通过实践操作,加深对嵌入式系统设计原理、方法和工具的理解,提高嵌入式系统设计能力。
二、实验目的1. 掌握嵌入式系统设计的基本原理和流程;2. 学会使用嵌入式开发工具和环境;3. 培养团队协作能力和实践操作能力;4. 提高嵌入式系统设计水平。
三、实验内容1. 嵌入式系统基础知识学习;2. 嵌入式开发工具和环境搭建;3. 嵌入式系统设计实例分析;4. 实验项目设计及实现。
四、实验设备1. 嵌入式开发板(如STM32、ESP32等);2. 编译器(如Keil、IAR等);3. 程序调试器(如JTAG、ST-Link等);4. 实验指导书、参考资料等。
五、实验步骤1. 学习嵌入式系统基础知识,了解嵌入式系统的特点和应用领域;2. 搭建嵌入式开发环境,包括安装编译器、调试器等;3. 分析嵌入式系统设计实例,了解设计流程和关键技术;4. 设计并实现实验项目,如设计一个简单的嵌入式应用程序;5. 对实验项目进行调试和优化,确保其正常运行;6. 编写实验报告,总结实验过程和心得体会。
六、实验心得通过本次嵌入式实训,我深刻认识到嵌入式系统设计的重要性。
以下是我的一些心得体会:1. 嵌入式系统设计需要具备扎实的理论基础和丰富的实践经验;2. 嵌入式开发工具和环境对嵌入式系统设计至关重要;3. 团队协作能力在嵌入式系统设计中尤为重要;4. 嵌入式系统设计需要注重代码质量和系统稳定性;5. 嵌入式系统设计需要不断学习和积累,以提高设计水平。
总之,本次嵌入式实训让我受益匪浅,不仅提高了我的嵌入式系统设计能力,还让我对嵌入式系统有了更深入的了解。
在今后的学习和工作中,我会继续努力,不断提高自己的嵌入式系统设计水平。
嵌入式系统实验报告学号:姓名:班级:13电子信息工程指导老师:苏州大学电子信息学院2016年12月实验一:一个灯的闪烁1、实验要求实现PF6-10端口所连接的任意一个LED灯点亮2、电路原理图图1 LED灯硬件连接图3、软件分析RCC_Configuration(); /* 配置系统时钟*/GPIO_Configuration(); /* 配置GPIO IO口初始化*/ for(;;){GPIOF->ODR = 0xfcff; /* PF8=0 --> 点亮D3 */Delay(1000000);GPIOF->ODR = 0xffff; /* PF8=1 --> 熄灭D3 */Delay(1000000);4、实验现象通过对GPIOF8的操作,可以使LED3闪烁5、实验总结这是第一次使用STM32开发板,主要内容是对IO端口进行配置,点亮与IO端口相连接的LED灯,闪烁周期为2S。
通过本实验对STM32开发板的硬件原理有了初步了解。
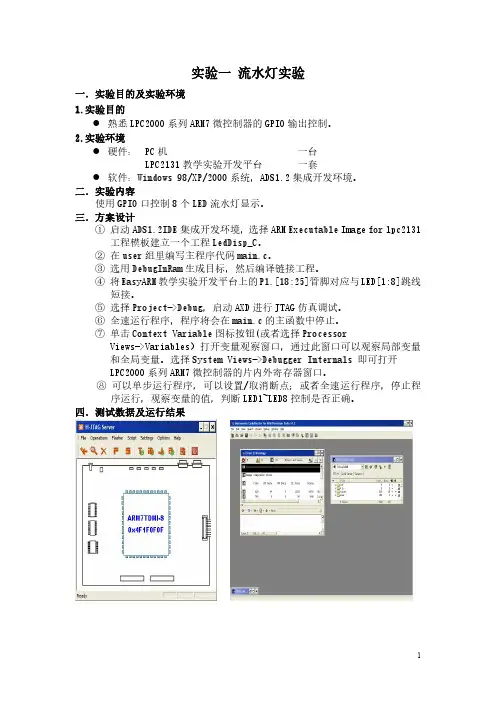
实验二:流水灯1、实验要求实现PF6-10端口所连接的5个LED灯顺次亮灭2、电路原理图图1 流水灯硬件连接图3、软件分析int main(void){RCC_Configuration();/* 配置系统时钟*/GPIO_Configuration();/* 配置GPIO IO 口初始化*/for(;;){GPIOF->ODR = 0xffbf;/* PF6=0 --> 点亮LED1 */Delay(5000000);GPIOF->ODR = 0xff7f;/* PF7=0 --> 点亮LED2 */Delay(5000000);GPIOF->ODR = 0xfeff;/* PF8=0 --> 点亮LED3 */Delay(5000000);GPIOF->ODR = 0xfdff;/* PF9=0 --> 点亮LED4 */Delay(5000000);GPIOF->ODR = 0xfbff;/* PF10=0 --> 点亮LED5 */ }}4、实验现象LED1~LED5依次点亮,亮灭的时间间隔都为1S。
《嵌入式系统原理与应用》实验报告实验序号:5 实验项目名称:定时器实验11计算机学号XXX 姓名XX 专业、班实验地点实验楼1#416 指导教师XX 实验时间2013-5-10一、实验目的1. 掌握LPC2200 专用工程模板的使用;2. 熟悉LPC2000 系列ARM7 微控制器的VIC的使用;3. 熟悉LPC2000 系列ARM7 微控制器的定时器的控制。
二、实验设备(环境)及要求硬件:PC机;软件:PC机操作系统windows XP,ADS1.2集成开发环境,Proteus软件。
三、实验内容与步骤实验内容:设置P0.2 脚为GPIO 功能,外接一个LED灯。
配置并初始化ARM的定时器0,并使能定时器中断,中断服务程序在2秒钟将LED灯控制输出信号取反,然后清除中断标志并退出中断。
四、实验结果与数据处理1.实验效果截图2.源程序#include "config.h"void __irq Timer0_ISR(void) {if((IO0SET&0x00000004)==0) IO0SET=0x00000004;elseIO0CLR=0x00000004;T0IR=0x01;VICVectAddr=0;}int main (void){PINSEL0&=0xFFFFFFCF;IO0DIR |=0x00000004;T0TC=0;T0PR=0;T0MCR=0x03;T0MR0=Fpclk/2.5;T0TCR=0x01;VICIntSelect=VICIntSelect&(~(1<<4)); VICVectCntl0=0x20|4;VICVectAddr0=(uint32)Timer0_ISR; VICIntEnable=(1<<4);}3.流程图开始设置Timer0_ISR函数定时器0定时中五、分析与讨论又忘了打开中断开关。
还有就是取反操作中IO0SET不能为IO0PIN不然会一直亮,这个比较不能理解,又是虚拟环境问题。
《嵌入式系统原理及实验》实验报告Lab 1超级循环模式与头文件模式李颖琦学号:201013201009 电子邮件:zhangsan@2012年11月17日一、闪烁灯(一)实现原理1.总体思路:利用软件延迟实现led灯的闪烁。
2.硬件设计:电路图解释:c1,c2,x1构成的是震荡电路;r1,c3构成的是上位电路;p2.0,led,r2连进单片机,当p2.0=0时亮,1则灭。
(电路图/仿真图+解释。
)3.软件设计:开始P2.0 输出“1”;D1灭延时0.2秒P2.0 输出“0”;D1亮延时0.2秒流程图代码解释:左边是头文件,delay函数是实现软件延迟0.2s;右边是主函数,super loop 是实现led灯不断交替闪烁。
(流程图,算法解释,关键代码段+解释。
)(二)调试1.调试的方式:联合调试调试现象:当按调试按键后,电路图均有通电现象,即呈现的是做好准备能够正常工作。
(调试现象、详细过程。
)2.遇到问题的处理(如果有就写,不论是电路的问题还是软件的问题)(三)实验再思考1.进一步改进的设想(如果有)2.实验的收获(或总结):能够实现led灯闪烁,能够看懂程序的意思。
3.实验中尚不能解决的疑问(如果有)二、发光二极管显示一位十进制的BCD码(一)实现原理1.总体思路:再次利用软件延迟逐个实现led灯的闪烁。
2.硬件设计:电路图解释:c1,c2,x1构成的是震荡电路;r1,c3构成的是上位电路;p2.0-p2.3,led,r2-r5连进单片机,当p2.*=0时亮,1则灭,依次实现bcd二进制数0-9的转换(此截图为二进制数8的实验现象)。
3.软件设计:流程图基本同上小个实验代码解释:左边是主函数部分,super loop是以赋值的形式实现led灯在0-9位二进制数之间不断依次交替闪烁;右边是头文件,delay函数是实现软件延迟0.2s。
(二)调试1.调试的方式:联合调试调试现象:当按调试按键后,电路图均有通电现象,即2.遇到问题的处理:程序中的定义位声明,一定要分别以sbit p2_0=p2^0的形式来定义的原因。
嵌入式系统设计实验报告班级: 20110612学号: ***********名:***成绩:指导教师:武俊鹏、刘书勇1. 实验一1.1 实验名称博创UP-3000实验台基本结构使用方法1.2 实验目的1.熟悉嵌入式系统开发式流程概述。
2.熟悉UP-net3000实验平台的核心硬件电路和外设。
3.熟悉ARM JTAG的安装与使用。
1.3 实验环境硬件:ARM 嵌入式开发平台、用于ARM7TDMI的JTAG仿真器、PC 机Pentium100以上、串口线。
软件:PC机操作系统win98、Win2000或WinXP、ARM SDT 2.51或ADS1.2集成开发环境、仿真器驱动程序、超级终端通讯程序。
1.4 实验内容及要求1.熟悉嵌入式系统开发式流程概述。
2.熟悉UP-net3000实验平台的核心硬件电路和外设。
3.熟悉ARM JTAG的安装与使用。
1.5 实验设计与实验步骤1.新建超级终端2.选择ARM 开发实验台串口。
完成新建超级终端的设置以后,可以选择超级终端文件菜单中的保存,将当前设置3.保存为一个特定超级终端到桌面上,以备后用。
用串口线将PC机串口和平台UART0 正确连接后,就可以在超级终端上看到程序输出的信息了。
4.启动开发板,按住任意键,使开发板进入BIOS设置状态。
5.在超级终端的界面上,显示BIOS版本信息,以及相应的测试指令。
操作时,要在PC机上输入小写的字母快捷键,进入到相应的功能中去。
6.按照超级终端上的提示信息,进行功能的测试。
1.6 实验过程与分析本次实验操作起来并不困难,因为此次实验属于验证型实验,按照实验资料所给的提示信息,以上面的步骤,即可得到实验的结果。
进入到BIOS界面后,按照超级终端上的提示信息来进行功能1.7 实验结果总结在实验过程中,我们进行的很顺利,没有遇到什么问题,在超级终端界面,按提示的快捷键来测试对应的功能。
如e:测试由ZLG7289 驱动的LED 显示,共分3 步,请看超级终端提示按任意键继续,同时观察LED 的变化,最后返回主菜单。
一、实验背景与目的随着信息技术的飞速发展,嵌入式系统在各个领域的应用越来越广泛。
为了提升学生对嵌入式系统的理解和应用能力,本实验课程旨在通过综合实训,让学生全面掌握嵌入式系统的开发流程,包括硬件选型、软件开发、系统调试以及项目实施等环节。
通过本实验,学生能够熟悉嵌入式系统的基本原理,提高实际操作能力,为今后从事嵌入式系统相关工作打下坚实基础。
二、实验环境与工具1. 硬件平台:选用某型号嵌入式开发板作为实验平台,具备丰富的外设接口,如GPIO、UART、SPI、I2C等。
2. 软件平台:采用某主流嵌入式Linux操作系统,支持交叉编译工具链,方便软件开发和调试。
3. 开发工具:集成开发环境(IDE),如Eclipse、Keil等,提供代码编辑、编译、调试等功能。
4. 其他工具:示波器、逻辑分析仪、电源适配器等。
三、实验内容与步骤1. 硬件平台搭建(1)根据实验要求,连接嵌入式开发板与计算机,确保硬件连接正确无误。
(2)配置开发板电源,检查开发板各个外设是否正常工作。
2. 软件环境搭建(1)在计算机上安装嵌入式Linux操作系统,并配置交叉编译工具链。
(2)安装集成开发环境(IDE),如Eclipse或Keil,并进行相关配置。
3. 嵌入式系统开发(1)根据实验要求,设计嵌入式系统功能模块,编写相关代码。
(2)利用IDE进行代码编辑、编译、调试,确保程序正常运行。
4. 系统调试与优化(1)使用示波器、逻辑分析仪等工具,对系统进行调试,检查各个模块是否正常工作。
(2)根据调试结果,对系统进行优化,提高系统性能和稳定性。
5. 项目实施(1)根据实验要求,设计并实现一个嵌入式系统项目,如智能家居控制系统、工业自动化控制系统等。
(2)编写项目报告,总结项目实施过程和心得体会。
四、实验结果与分析通过本次嵌入式综合实训,我们完成了以下实验内容:1. 熟悉嵌入式开发平台的基本硬件和软件环境。
2. 掌握嵌入式系统开发流程,包括硬件选型、软件开发、系统调试等环节。
- - -. 嵌入式系统课程设计必做部分学院:电控学院专业:通信工程设计名称:IIC同步串行通讯1、设计的目的:1.掌握S3C44B0IIC控制器的编程方法2.编程实现串行EEPROM存储器24C16的数据存储和访问。
2、设计的内容:1.学习S3C44B0 IIC控制器的原理与编程方法;2.学习IIC存储器24C16的编程方法;3.理解IIC存储器24C16的与S3C44B0的电路连接原理;4.掌握C语言中断程序设计方法;5.编程实现对24C16的数据存储和访问。
3、设计思路、遇到的问题及解决方法:此次试验,我们结合《嵌入式系统原理及应用》教材以及老师提供的各种pdf和word资料,了解到了各种寄存器的配置方法,如IICDS等。
对于例程中的各种函数,如Wr24C16(), Rd24C16(),__irq IicInt()等,通过对程序的仔细研读,最终了解了它们的各自用途,并在此基础上,编写了主函数。
实现了从0-255共256个字节的写入及读取操作。
这次实验我们遇到了不少的难题,像开始使用ARM-Project Manager平台一开始,由于对此平台的不了解,我们走了许都弯路。
像对于头文件的配置问题,总是配置不对,后来发现头文件为程序自主生成,无需配置。
还有关于程序中的一些.s文件,开始并不知道是有何作用,后来在老师的指点下,发现有必要将其加入到sourse文件栏中调用,同时调用的同时,由于不理解调用的路径问题,多次编译失败,后来发现了问题,是路径配置不当,最终更改了路径,解决了问题。
再有,在对老师提供的例程进行阅读时候,发现了不少的啰嗦以及错误语句,例如Uart_Printf("%d\n",k);语句就不应该为Uart_Printf("%d\n",&k);这些问题我们都通过调试最终给予了改正。
4、设计的结果及验证正确输出结果如下截图,从超级终端中回显显示了正确数据,实验成立。
111 实验项目名称:基于ucOS 的多任务系统一、实验目的(1) 掌握LPC2200(for MagicARM2200)专用工程模板的使用;专用工程模板的使用;(2) 能够在MagicARM2200-S 上运行基于μC/OS μC/OS-II -II 操作系统的程序;操作系统的程序;(3) 掌握基于μC/OS μC/OS-II -II 操作系统的用户程序的编写格式。
操作系统的用户程序的编写格式。
二、实验内容及要求建立三个或三个以上的μC/OS μC/OS-II -II 的任务,一个任务用于检测KEY1 按键输入,称之为按键检测任务,另一个任务用于控制蜂鸣器,就称之为蜂鸣器控制任务。
还有LED 灯任务和电机任务。
要求各个任务之间不是独立的,而是有相互关联的,达到多任务间的数据通信和同步的实验要求。
的数据通信和同步的实验要求。
三、实验设备及软件硬件:PC 机 一台一台MagicARM2200-S 教学实验开发平台教学实验开发平台 一套一套软件:Windows98/XP/2000 系统,ADS 1.2 集成开发环境集成开发环境μC/OS μC/OS-II -II 操作系统(V2.52) 四、设计方案方案一: 建立四个任务:LED 灯、按键、电机、蜂鸣器灯、按键、电机、蜂鸣器LED 任务:LED 灯有不同的花样,由数组中的十六进制数据决定。
可通过设计数组的数据来设计出很多的花型。
组的数据来设计出很多的花型。
按键任务:按键任务主要是对按下的键在0到4内计数,再将所计的数通过邮箱发送给LED 、电机任务,来控制任务间的通信。
、电机任务,来控制任务间的通信。
电机任务:电机的转速会不断的改变,电机的转速也是靠按键任务里发送的广播邮箱的值确定的,有五种转速。
每次按下一次按键,转速就会改变一次。
蜂鸣器任务:蜂鸣器的响灭是由LED 任务里发送的信号量控制的,任务里发送的信号量控制的,当当LED 灯亮完一个周期后就发送一个信号让蜂鸣器响起来,一个周期后就发送一个信号让蜂鸣器响起来,响完后蜂鸣器自己删除信号量,响完后蜂鸣器自己删除信号量,响完后蜂鸣器自己删除信号量,等着等着LED 灯再一次并且发送信号。
【精品】嵌入式实验报告一、实验目的本实验旨在让学生通过嵌入式实验的学习,掌握基本的嵌入式开发技术和方法,深入了解嵌入式系统应用开发的方方面面,能够设计和开发简单的嵌入式系统应用程序。
二、实验内容1.熟悉 Keil C51 软件开发环境,掌握 Keil C51 移植说明和工程建立方法。
2.掌握Keil C51 的程序设计方法,包括:调试程序流程,数组、结构体、指针、串口输入输出、中断优先级等C 语言程序设计相关内容。
3.学习用 Keil C51 软件编写程序,掌握嵌入式系统的基本输入输出操作,包括 led 指示灯的控制、数码管显示、按键输入检测等。
4.使用Keil C51 编写简单的“闪烁LED”,“流水灯”,“数码管显示”的程序。
三、实验原理1.单片机概述单片机是一种集成电路,其功能比较完整,包含了CPU、RAM、ROM,以及I/O口等基本部件,并带有一些特殊功能部件的控制器。
单片机的应用具有体积小、功耗低、成本低等优点。
2. keil C51 嵌入式开发环境Keil C51是一款专业的嵌入式开发环境,它支持所有典型的 8051 系列单片机,以及251 和390 系列的单片机。
Keil C51配合嵌入式编译器工具,提供了丰富的开发工具,支持调试、仿真、下载以及优化嵌入式程序的功能,同时,它还提供了大量的应用程序实例,易于入门和学习。
3. LED指示灯控制原理在Keil C51 开发环境中,LED 指示灯的控制可以通过程序中指定的端口来实现。
通过对LED指定的端口进行电平控制,就能够实现LED的点亮和灭掉。
四、实验步骤本次实验设计了三个程序,“闪烁LED”,“流水灯”,“数码管显示”三个程序。
具体实验步骤如下:1.实现“闪烁LED”程序(1)首先,我们需要打开Keil C51 软件,选择样本程序进行修改。
(2)根据程序需要完成led指示灯端口配置,然后使用while 循环来控制led 指示灯的闪动。
嵌入式实验报告心得篇一:嵌入式系统原理实验总结报告嵌入式系统原理实验总结报告车辆座椅控制系统实验XX/5/23嵌入式系统原理实验总结报告一、技术性总结报告(一)题目:车辆座椅控制系统实验(二)项目概述:1.为了实现车辆座椅控制的自动化与智能化。
2.方便用户通过智能手机与车载传感器之间的联动。
3.使车辆作为当今物联网中重要的一个节点发挥作用。
4.通过车辆座椅控制系统实验实现对嵌入式系统原理课程的熟练掌握与对嵌入式系统原理知识的深化记忆。
5. 加强本组学生对嵌入式系统原理的更深层次的理解与运用。
(三)技术方案及原理本次试验分为软件、硬件两个部分。
1.软件部分。
A.智能手机部分,包括通过智能手机对座椅的控制部分、手机所携带的身份信息部分。
本部分软件使用Java编写,其程序部分为:主程序:package ;import ; import ; import ; import ; import ; import ;import ; import ; import ; import ;import ; import ; import ;import ; import ;import ; import ; import ; import ;import ;import ;import ; import ;import ; import ; import ;import ; import ; import ;public class MainActivity extends ActionBarActivity { private Button Up = null; private Button Left = null; private Button Dowm = null; private Button Right = null; private Socket socket = null;private static final String HOST = "";private static final int PORT = 10007;public void onCreate(Bundle savedInstanceState) { super.onCreate(savedInstanceState);setContentView(; initControl();}private void initControl() {Up = (Button) findViewById(; Up.setOnClickListener(new ReceiverListener());} class ReceiverListener implements OnClickListener {protected String line; @Overridepublic void onClick(View v) {// TODO Auto-generated method stub new Thread() {@Overridepublic void run() {try {Socket socket = new Socket(HOST, PORT);BufferedReader br = new BufferedReader( new InputStreamReader(socket.getInputStream()));line = br.readLine(); br.close();} catch (UnknownHostException e) { // TODO Auto-generated catch block e.printStackTrace(); } catch (IOException e) {// TODO Auto-generated catch block e.printStackTrace(); }handler.sendEmptyMessage(0);} }.start(); }}private Handler handler = new Handler() { @Override public void handleMessage(Message msg) { super.handleMessage(msg);}};@Overridepublic boolean onCreateOptionsMenu(Menu menu) {// Inflate the menu; this adds items to the action bar if it is present.getMenuInflater().inflate(, menu);return true; } @Overridepublic boolean onOptionsItemSelected(MenuItem item) {// Handle action bar item clicks here. The action bar will// automatically handle clicks on the Home/Up button, so long// as you specify a parent activity in id = item.getItemId();if (id == { return true;}return super.onOptionsItemSelected(item); }/*** A placeholder fragment containing a simple view.*/public static class PlaceholderFragment extends Fragment {public PlaceholderFragment() {}@Overridepublic View onCreateView(LayoutInflater inflater, ViewGroup container, Bundle savedInstanceState) { View rootView = inflater.inflate(, container, false);return rootView;} } }界面代码:android:name=""/>篇二:嵌入式心得体会这学期才接触嵌入式系统感觉还称不上入门,我通过学习知道了嵌入式的发展前景很大,各个领域都用到了嵌入式,学好嵌入式不愁没饭吃。
嵌 入 式 系 统 实 验 报 告 指导教师: 学科专业: 班 级: 学 号: 姓 名:
2014年6月 嵌入式系统实验报告 前 言 从20世纪七十年代单片机的出现到各式各样的嵌入式微处理器,微控制器的大规模应用,嵌入式系统已经有了近30年的发展历史,并在全世界各行业得到广泛应用。嵌入式系统产品的研制和应用已经成为我国信息化带动工业化、工业化促进信息化发展的新的国民经济增长点。经过几十年的发展,嵌入式系统已经在很大程度改变了人们的生活、工作和娱乐方式,而且这些改变还在加速。嵌入式系统具有无数的种类,每类都具有自己独特的个性。例如,MP3、数码相机与打印机就有很大的不同。汽车中更是具有多个嵌入式系统,使汽车更轻快、更干净、更容易驾驶,机顶盒、高清电视、游戏机、智能玩具、交换机、路由器、数控设备或仪表、汽车电子、家电控制系统、医疗仪器、航天航空设备等等,都是典型的嵌入式系统。事实上,几乎所有带有一点“智能”的家电(全自动洗衣机、电脑电饭煲…)都是嵌入式系统。嵌入式系统广泛的适应能力和多样性,使得视听、工作场所甚至健身设备中到处都有嵌入式系统。 高端的嵌入式系统和工业软件的发展, 实际上与我们对该行业最先进的科学技术前沿的掌握有关,换言之,与我国该行业的科学技术水平有关。学习和研究嵌入式系统,具有重大意义。 这学期的嵌入式系统的学习过程中我们在2410RP这一实验开发平台上进行了诸多嵌入式的基础实验。在本报告中,将把其中两个具有代表性的实验的原理、内容、结果以及驱动和测试程序写出来。嵌入式系统实验报告 目 录 实验一 数码管显示 ....................................................................................................................... 1 1.1 实验目的 ............................................................................................................................ 1 1.2 实验内容 ............................................................................................................................ 1 1.3 实验原理 ............................................................................................................................ 1 1.3.1 LED的发光原理 .................................................................................................. 1 1.3.2 八段LED显示器 ................................................................................................... 1 1.3.3 芯片zlg7289A的介绍 ........................................................................................... 2 1.3.4 数码管的连接电路 ................................................................................................. 3 1.4 实验步骤 ............................................................................................................................ 3 1.5 实验源代码解释与说明 .................................................................................................... 4 1.6 总结 .................................................................................................................................. 11 实验二 LED点阵驱动实验 ........................................................................................................ 12 2.1 实验目的 .......................................................................................................................... 12 2.2 实验内容 .......................................................................................................................... 12 2.3 实验原理 .......................................................................................................................... 12 2.3.1 8X8点阵数码管发光原理 ................................................................................. 12 2.3.2 数码管的连接电路 ............................................................................................... 12 2.3.3 I/O接口 .............................................................................................................. 13 2.4 实验步骤 .......................................................................................................................... 13 2.5 实验源代码解释与说明 .................................................................................................. 14 2.6 实验结果 .......................................................................................................................... 19 2.7 总结 .................................................................................................................................. 19 嵌入式系统实验报告
第 1 页 实验一 数码管显示 1.1 实验目的 学习串并转换的相关知识,并编写驱动程序。 1.2 实验内容 1)了解数码管显示的工作原理; 2)掌握数码管驱动的编写及测试过程; 3)对zlg7289A的驱动程序进行编写; 4)驱动数码管并显示个人学号。
1.3 实验原理 1.3.1 LED的发光原理 LED(Light Emitting Diode),即发光二极管。是一种半导体固体发光器件。它是利用固体半导体置于一个有引线的架子上,然后四周用环氧树脂密封,起到保护内部芯线的作用,所以LED的抗震性能好。 发光二极管的核心部分是由p型半导体和n 型半导体组成的晶片,如图所示,在p型半导体和n型半导体之间有一个过渡层,称为p-n结。在某些半导体材料的PN结中,注入的少数载流子与多数载流子复合时会把多余的能量以光的形式释放出来,从而把电能直接转换为光能。PN结加反向电压,少数载流子难以注入,故不发光。这种利用注入式电致发光原理制作的二极管叫发光二极管,通称LED。当它处于正向工作状态时(即两端加上正向电压),电流从LED阳极流向阴极时,半导体晶体就发出从紫外到红外不同颜色的光线,光的强弱与电流有关。
图1-1 LED发光原理图 1.3.2 八段LED显示器 八段LED显示器由8个发光二极管组成,如图1-2、图1-3所示。基中7个嵌入式系统实验报告 第 2 页 长条形的发光管排列成“日”字形,另一个贺点形的发光管在显示器的右下角作为显示小数点用,它能显示各种数字及部份英文字母。LED显示器有两种不同的形式:一种是8个发光二极管的阳极都连在一起的,称之为共阳极LED显示器;另一种是8个发光二极管的阴极都连在一起的,称之为共阴极LED 显示器。 共阴和共阳结构的LED显示器各笔划段名和安排位置是相同的。当二极管导通时,相应的笔划段发亮,由发亮的笔划段组合而显示的各种字符。8个笔划段hgfedcba 对应于一个字节(8位)的D7 D6 D5 D4 D3 D2 D1 D0,于是用8位二进制码就可以表示欲显示字符的字形代码。例如,对于共阴LED显示器,当共阴极接地(为零电平),而阳极hgfedcba各段为0111011时,显示器显示"P"字符,即对于共阴极LED 显示器,“P”字符的字形码是73H。如果是共阳LED显示器,共阳极接高电平,显示“P”字符的字形代码应为10001100(8CH)。这里必须注意的是:很多产品为方便接线,常不按规则的方法去对应字段与位的关系,这时字形码就必须根据接线来自行设计了。