51单片机数码管动态显示分析
- 格式:docx
- 大小:36.79 KB
- 文档页数:2
51单片机数码管0到99循环程序代码1. 概述在嵌入式系统的开发中,数码管是一种常见的输出设备,可以用于显示数字、字符等信息。
而51单片机是一种广泛应用的微控制器,其结合了强大的功能和灵活的应用,能够很好地驱动数码管。
本文将介绍如何使用51单片机编写一个循环显示0到99的程序,通过数码管输出这些数字。
2. 电路连接我们需要连接51单片机和数码管。
通常我们使用的是共阴数码管,其连接方式如下:- VCC连接到5V电源- GND连接到GND- DIO(数据输入/输出)连接到51单片机的IO口3. 程序设计下面是一个简单的C语言程序设计,用于控制数码管显示0到99的数字。
```c#include <reg51.h>sbit DIO = P2^0; // 数码管数据输入/输出sbit CL = P2^1; // 数码管片选信号unsigned char code numCode[10] = { 0xc0, // 00xf9, // 10xa4, // 20xb0, // 30x99, // 40x92, // 50x82, // 60xf8, // 70x80, // 80x90 // 9};//延时函数void delay(unsigned int i) {unsigned int j,k;for (j=i;j>0;j--)for(k=110;k>0;k--);}void display(unsigned char num) { CL = 1; //关闭片选DIO = numCode[num / 10]; //十位 delay(2);CL = 0;DIO = 0xff; //消隐delay(2);CL = 1; //关闭片选DIO = numCode[num 10]; //个位 delay(2);CL = 0;DIO = 0xff; //消隐delay(2);}void m本人n() {unsigned char i,j;while(1) {for(i=0;i<10;i++) {for(j=0;j<10;j++) {display(i * 10 + j);}}}}```4. 程序说明- 首先定义了数码管的连接引脚,以及0~9的显示编码。
51下面是51单片机使用4×4矩阵键盘的汇编程序,并在数码管的最后一位显示一个字符:```ORG 0 ;程序从地址0开始MOV P1,#0FFH ;P1口设置为输入口MOV P0,#0FH ;P0口设置为输出口LOOP:MOV A,P1 ;读取P1口的值CJNE A,#0FFH,KEY_PRESSED ;判断是否有按键按下SJMP LOOP ;如果没有按键按下,继续循环KEY_PRESSED:MOV R0,A ;保存按键的值CLR P0.0 ;选定行0MOV A,P1ANL A,#0F0H ;按位与运算,保留列位的值CJNE A,#0F0H,COL0 ;判断是否有按键按下在第0列MOV A,#'0' ;如果在第0列按下按键,则A的值为0JMP DISP ;跳转到显示程序COL0:CLR P0.1 ;选定行1MOV A,P1ANL A,#0F0HCJNE A,#0E0H,COL1 ;判断是否有按键按下在第1列MOV A,#'1' ;如果在第1列按下按键,则A的值为1JMP DISP ;跳转到显示程序COL1:CLR P0.2 ;选定行2MOV A,P1ANL A,#0F0HCJNE A,#0D0H,COL2 ;判断是否有按键按下在第2列MOV A,#'2' ;如果在第2列按下按键,则A的值为2JMP DISP ;跳转到显示程序COL2:CLR P0.3 ;选定行3MOV A,P1ANL A,#0F0HCJNE A,#0B0H,COL3 ;判断是否有按键按下在第3列MOV A,#'3' ;如果在第3列按下按键,则A的值为3JMP DISP ;跳转到显示程序COL3:CLR P0.4 ;选定行4MOV A,P1ANL A,#0F0H4MOV A,#'4' ;如果在第4列按下按键,则A的值为4 JMP DISP ;跳转到显示程序COL4:CLR P0.5 ;选定行5MOV A,P1ANL A,#0F0HCJNE A,#0B0H,COL5 ;判断是否有按键按下在第5列 MOV A,#'5' ;如果在第5列按下按键,则A的值为5 JMP DISP ;跳转到显示程序COL5:CLR P0.6 ;选定行6MOV A,P1ANL A,#0F0HCJNE A,#0D0H,COL6 ;判断是否有按键按下在第6列 MOV A,#'6' ;如果在第6列按下按键,则A的值为6 JMP DISP ;跳转到显示程序COL6:CLR P0.7 ;选定行7MOV A,P1ANL A,#0F0HCJNE A,#0E0H,COL7 ;判断是否有按键按下在第7列 MOV A,#'7' ;如果在第7列按下按键,则A的值为7 JMP DISP ;跳转到显示程序COL7:MOV A,#00HJMP EXIT ;如果没有按下任何键,退出程序DISP: ;数码管显示程序MOV R1,#100B ;延时计数器初始化MOV P2,A ;把按键值存入P2口MOV A,#07HANL A,P0 ;从P0口读取选定的行值MOV P0,A ;根据选定的行值输出相应的值ACALL DELAY ;调用延时程序MOV P0,#0FH ;关闭所有行DJNZ R1,$ ;当延时计数器不为0时,继续延时MOV A,#0FHMOV P0,A ;清除所有显示JMP LOOP ;跳转回主程序EXIT:MOV P2.7,1 ;在数码管的最后一位显示字符1SJMP EXIT ;无限循环DELAY: ;延时程序MOV R2,#75DMOV R3,#200D DELAY3:DJNZ R3,$DJNZ R2,DELAY2 RET```。
南昌大学实验报告学生姓名:学号:专业班级:实验类型:⃞验证⃞综合⃞设计⃞创新实验日期:2019. 4.30 实验成绩:实验四外部中断实验(一)实验目的1.掌握单片机外部中断原理;2.掌握数码管动态显示原理。
(二)设计要求1.使用外部中断0和外部中断1;2.在动态数码管上显示中断0次数,中断1用作次数清0,数码管采用74HC595驱动。
(三)实验原理1.中断:计算机执行主程序过程中,由于临时重要事件,需要暂停当前程序的运行,转到中断服务程序去处理临时事件,处理完后又返回原程序的断点处继续运行。
图1STC15单片机的中断系统包含21个中断源,2个中断优先级,二级中断服务嵌套,中断允许寄存器IE、IE2和INT_CLKO控制中断允许。
中断优先级寄存器IP、IP2管理中断优先级。
同优先级中断同时提出中断请求时,由内部的查询逻辑确定响应次序。
中断请求源中的外部中断0(INT0)和外部中断1(INT1)详述如下:1)外部中断0(INT0):中断信号由P3.2引脚输入。
通过IT0来设置中断请求的触发方式。
当IT0为“1”时,外部中断0为下降沿触发;当IT0为“0”时,无论是上升沿还是下降沿,都会引发外部中断0.一旦输入信号有效,则置位IE0标志,向CPU申请终端。
2)外部中断1(INT1):中断信号由P3.3引脚输入。
通过IT1来设置中断请求的触发方式。
当IT1为“1”时,外部中断0为下降沿触发;当IT1为“0”时,无论是上升沿还是下降沿,都会引发外部中断0.一旦输入信号有效,则置位IE0标志,向CPU申请终端。
2.LED数码管是显示数字和字母的常见显示器件,由8个发光二极管构成,结构如图2:图2段码:a、b、c、d、e、f、g、dp段的二进制代码(a为最低位),控制显示字型。
位选:公共端com,控制数码管是否显示。
3.数码管动态显示原理:任何时刻只有一个数码管处于显示状态,单片机采用“扫描”方式控制各个数码管轮流显示,通常将所有数码管段码线的相应段并联在一起,由一个8位I/O 端口控制。
摘要近年来随着科学技术的发展,单片机的应用正在不断走下面还深入。
本文简单阐述了基于单片机的数字秒表的的设计。
本设计的主要特点是计时精度达到0.01秒,是各种体育竞赛的必要设备之一。
本设计的数字秒表采用AT89S52单片机为主要器件,利用其定时器的原理,结合显示电路、LED数码管以及外部外部中断电路来设计计时器。
将软硬件结合起来,使得系统能实现0~99.99秒的计时,计时精度位0.01秒。
硬件系统利用proteus仿真,在仿真中就能观察到系统的实际运行情况。
关键字:单片机数字秒表仿真一硬件设计1、1 总体方案的设计数字秒表具有显示直观、读取方便、精度高等优点,在计时中广泛应用。
本设计中用单片机和数码管组成数字秒表力求结构简单。
设计中包括硬件电路的设计和系统程序的设计。
硬件电路主要有主控制器、控制按钮与显示电路组成。
主控制器采用单片机AT89S52,显示电路采用四位共阴极数码管显示计时时间。
本设计利用AT89S52单片机的定时器,使其能精确计时。
利用中断系统使其实现启动和暂停的功能,P0口输出段码数据,P2.0~P2.2连上译码器作为位选,P3.2和P3.3接口的两个按钮分别实现启动和暂停功能。
设计的基本要求是正确性。
硬件电路按下图进行设计。
计时器采用T0中断实现,定时溢出中断周期为1ms,当溢出中断后向CPU发出溢出中断请求,每发出10次中断请求就对10ms位(即最后一位)加一,达到100次就对100ms位加一,以此类推,直到99.99s为止。
再看按键的处理。
两个按键采用中断的方法,设置外部中断0和外部中断1位脉冲边沿触发方式,这样一来每当按键按下时便会触发中断,从而实现启动和暂停。
1.2 单片机的选择本设计在选取单片机时,充分借鉴了许多成型产品使用单片机的经验。
并根据自己的实际情况,选用了ATMEL公司的AT89S52。
ATMEL公司的89系列单片机以其卓越的性能、完善的兼容性、快捷便利的电擦写操作、低廉的价格完全替代了87C5162和875152,低电压、低功耗,有DIP、PLCC、QFP封装,是目前性能最好、价格最低、最受欢迎的单片机之一。

《单片机原理与应用实验》指导书厦门理工学院光电与通信工程学院目录目录 (I)第一章概述 (1)第二章实验系统组成和结构 (4)§2.1 系统主机的硬件组成 ................................................................ 错误!未定义书签。
2.1.1 逻辑电平开关电路...................................... 错误!未定义书签。
2.1.2 LED电平显示电路....................................... 错误!未定义书签。
2.1.3单脉冲电路........................................... 错误!未定义书签。
2.1.4 音频放大电路........................................... 错误!未定义书签。
2.1.5 继电器输出电路........................................ 错误!未定义书签。
2.1.6 逻辑门电路............................................. 错误!未定义书签。
2.1.7 逻辑测量(逻辑笔)电路................................. 错误!未定义书签。
2.1.8 4MHz脉冲信号源和多级分频电路......................... 错误!未定义书签。
2.1.9 可调模拟量输入电路..................................... 错误!未定义书签。
2.1.10 六位LED数码显示器................................... 错误!未定义书签。
2.1.11 4×6 键盘电路......................................... 错误!未定义书签。
目录一、设计题目和要求: (2)二、设计目的: (2)三、设计内容: (3)四、课程设计心得体会 (25)五、参考文献 (26)六、课程设计指导教师评审标准及成绩评定 (27)附件1:秒表原理图(实际接线图) (28)附件2:仿真图1 (30)附件3:仿真图2 (31)一、设计题目和要求:题目三:秒表应用AT89C51的定时器设计一个2位的LED数码显示作为“秒表”:显示时间为00~99s,每秒自动加1,设计一个“开始”键,按下“开始”键秒表开始计时。
设计一个“复位”键,按下“复位”键后,秒表从0开始计时。
任务安排:李座负责绘制电路原理图;梁宗林负责收集资料及电子版整理;付忠林负责程序和仿真。
二、设计目的:1.进一步掌握AT89C51单片机的结构和工作原理;2.掌握单片机的接口技术及外围芯片的工作原理及控制方法;3.进一步掌握单片机程序编写及程序调试过程,掌握模块化程序设计方法;4.掌握PROTEUS仿真软件的使用方法;5.掌握LED数码管原理及使用方法。
6.掌握定时器、外部中断的设置和编程原理。
7.通过此次课程设计能够将单片机软硬件结合起来,对程序进行编辑,校验。
8.该课程设计通过单片机的定时器/计数器定时和计数原理,设计简单的计时器系统,拥有正确的计时、暂停、清零、复位功能,并同时可以用数码管显示。
三、设计内容:了解8051芯片的的工作原理和工作方式,使用该芯片对LED数码管进行显示控制,实现用单片机的端口控制数码管,显示分、秒,并能用按钮实现秒表起动、停止、清零功能,精确到1秒。
AT89C51单片机的主要工作特性:·内含4KB的FLASH存储器,擦写次数1000次;·内含28字节的RAM;·具有32根可编程I/O线;·具有2个16位可编程定时器;·具有6个中断源、5个中断矢量、2级优先权的中断结构;·具有1个全双工的可编程串行通信接口;·具有一个数据指针DPTR;·两种低功耗工作模式,即空闲模式和掉电模式;·具有可编程的3级程序锁定定位;AT89C51的工作电源电压为5(1±0.2)V且典型值为5V,最高工作频率为24MHz.AT89C51各部分的组成及功能:振荡器和时钟电路数据存储器128字节程序存储器14KBCPU 两个16位定时器计数器中断控制总线扩展控制器并行可编程I/O口可编程串行口内部总线外部中断扩展控制P0 P1 P2 P3 RXD TXD1.单片机的中央处理器(CPU )是单片机的核心,完成运算和操作控制,主要包括运算器和控制器两部分。
#include〈reg52.h〉//#include#include<intrins。
h〉#define uchar unsigned char#define uint unsigned intsbit dula=P2^6;sbit wela=P2^7;sbit key1=P3^4;sbit key2=P3^5;sbit key3=P3^6;sbit beep=P2^3;unsigned code table[]={0x3f ,0x06 ,0x5b , 0x4f ,0x66 ,0x6d ,0x7d ,0x07 ,0x7f ,0x6f ,0x77 ,0x7c,0x39 , 0x5e , 0x79 ,0x71};uchar num1,num2,s,s1,m,m1,f,f1,num,numf,nums,dingshi;uchar ns,ns1,nf,nf1,numns,numnf;void delay(uint z);void keyscan ();void keyscan1 ();void alram();void display(uchar m,uchar m1,uchar f,ucharf1,uchars,uchars1); void display0(uchar nf,uchar nf1,uchar ns,uchar ns1);void main(){TMOD=0x01;//设定定时器0工作方式1TH0=(65536—46080)/256 ;TL0=(65536—46080)%256 ;EA=1;//开总中断ET0=1;//开定时器0中断TR0=1;//启动定时器0中断numns=12;numnf=0;while(1){if(dingshi==0){keyscan ();display(m,m1,f,f1,s,s1);alram();}else{keyscan1 ();display0(nf,nf1,ns,ns1);}}}void keyscan (){if(key1==0){delay(10);if(key1==0)nums++;if (nums==24)nums=0;while(!key1);display(m,m1,f,f1,s,s1);}if(key2==0){delay(10);if(key2==0)numf++;if (numf==60)numf=0;while(!key2);display(m,m1,f,f1,s,s1);}if(key3==0){delay(10);if(key3==0){dingshi=~dingshi;while(!key3)display(m,m1,f,f1,s,s1);}}/*if(key4==0){delay(10);if(key4==0){flag=1;while(!key4);display(m,m1,f,f1,s,s1);}}*/}void keyscan1(){if(key1==0){delay(10);if(key1==0)numns++;if (numns==24)numns=0;while(!key1);// display(nf,nf1,ns,ns1);}if(key2==0){delay(10);if(key2==0)numnf++;if (numnf==60)numnf=0;while(!key2);// display(nf,nf1,ns,ns1);}if(key3==0){delay(10);if(key3==0){dingshi=0;while(!key3);// display(m,m1,f,f1,s,s1);}}}void alram(){if((numnf==numf)&&(numns==nums))beep=0;if(((numnf+1==numf)&&(numns==nums))&&(dingshi==0))//一分钟报时提示beep=1;}void display0(uchar nf,uchar nf1,uchar ns,uchar ns1)//闹钟显示函数{nf=numnf%10;nf1=numnf/10;ns=numns%10;ns1=numns/10;/*wela=1;P0=0xc0;//送位选数据wela=0;P0=0xff;*/dula=1;P0=table[ns1];dula=0;P0=0xff;wela=1;P0=0xfe;wela=0;delay(1);dula=1;P0=table[ns]|0x80;dula=0;wela=1;P0=0xfd;wela=0;delay(1);dula=1;P0=table[nf1];dula=0;P0=0xff;wela=1;P0=0xfb;wela=0;delay(1);dula=1;P0=table[nf];dula=0;P0=0xff;wela=1;P0=0xf7;wela=0;delay(1);}void display(uchar m,uchar m1,uchar f,ucharf1,uchars,uchars1) //时间显示{dula=1;P0=table[m1];//秒位第1位dula=0;P0=0xff;wela=1;P0=0xef;wela=0;delay(1);dula=1;P0=table[m];// 秒位第2位dula=0;P0=0xff;wela=1;wela=0;delay(1);dula=1;P0=table[s1]; //时位第一位dula=0;P0=0xff;wela=1;P0=0xfe;wela=0;delay(1);dula=1;P0=table[s]|0x80;dula=0;P0=0xff;wela=1;P0=0xfd;wela=0;delay(1);dula=1;P0=table[f1];//分位第一位dula=0;P0=0xff;wela=1;P0=0xfb;wela=0;delay(1);dula=1;P0=table[f]|0x80;dula=0;P0=0xff;wela=1;P0=0xf7;wela=0;delay(1);}void T0_timer() interrupt 1{TH0=(65536—46080)/256 ;TL0=(65536—46080)%256 ;num2++;if(num2==20){num++;num2=0;m=num%10;m1=num/10;f=numf%10;f1=numf/10;s=nums%10;s1=nums/10;if(num==59){num=0;numf++;if(numf==59){numf=0;nums++;}if (nums==24)nums=0;}}}void delay(uint z){uint x,y;for(x=110;x〉0;x—-)for(y=z;y>0;y—-);}。
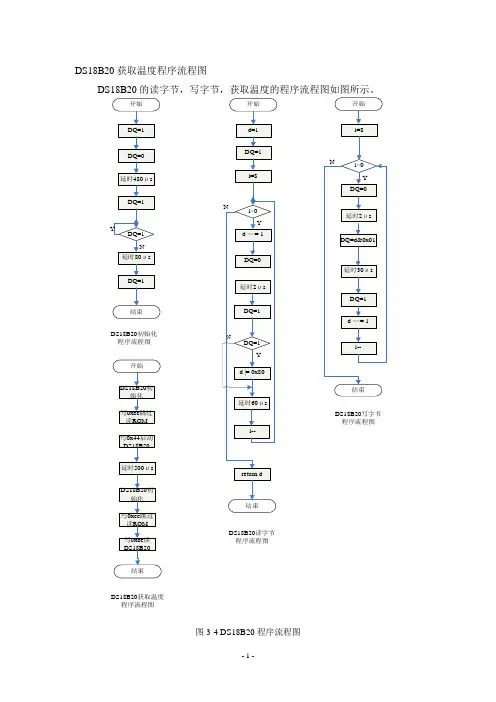
DS18B20获取温度程序流程图DS18B20的读字节,写字节,获取温度的程序流程图如图所示。
DS18B20初始化程序流程图DS18B20读字节程序流程图DS18B20写字节程序流程图DS18B20获取温度程序流程图图3-4 DS18B20程序流程图显示程序设计显示电路是由四位一体的数码管来实现的。
由于单片机的I/O 口有限,所以数码管采用动态扫描的方式来进行显示。
程序流程图如图所示。
图显示程序流程图按键程序设计按键是用来设定上下限报警温度的。
具体的程序流程图如图所示。
N图按键程序流程图附1 源程序代码/********************************************************************* 程序名; 基于DS18B20的测温系统* 功能:实时测量温度,超过上下限报警,报警温度可手动调整。
K1是用来* 进入上下限调节模式的,当按一下K1进入上限调节模式,再按一下进入下限* 调节模式。
在正常模式下,按一下K2进入查看上限温度模式,显示1s左右自动* 退出;按一下K3进入查看下限温度模式,显示1s左右自动退出;按一下K4消除* 按键音,再按一下启动按键音。
在调节上下限温度模式下,K2是实现加1功能,* K1是实现减1功能,K3是用来设定上下限温度正负的。
* 编程者:ZPZ* 编程时间:2009/10/2*********************************************************************/#include<AT89X52.h> //将AT89X52.h头文件包含到主程序#include<intrins.h> //将intrins.h头文件包含到主程序(调用其中的_nop_()空操作函数延时)#define uint unsigned int //变量类型宏定义,用uint表示无符号整形(16位)#define uchar unsigned char //变量类型宏定义,用uchar表示无符号字符型(8位)uchar max=0x00,min=0x00; //max是上限报警温度,min是下限报警温度bit s=0; //s是调整上下限温度时温度闪烁的标志位,s=0不显示200ms,s=1显示1s左右bit s1=0; //s1标志位用于上下限查看时的显示void display1(uint z); //声明display1()函数#include"ds18b20.h" //将ds18b20.h头文件包含到主程序#include"keyscan.h" //将keyscan.h头文件包含到主程序#include"display.h" //将display.h头文件包含到主程序/***********************主函数************************/void main(){beer=1; //关闭蜂鸣器led=1; //关闭LED灯timer1_init(0); //初始化定时器1(未启动定时器1)get_temperature(1); //首次启动DS18B20获取温度(DS18B20上点后自动将EEPROM中的上下限温度复制到TH和TL寄存器)while(1) //主循环{keyscan(); //按键扫描函数get_temperature(0); //获取温度函数keyscan(); //按键扫描函数display(temp,temp_d*0.625);//显示函数alarm(); //报警函数keyscan(); //按键扫描函数}}/********************************************************************* 程序名; __ds18b20_h__* 功能:DS18B20的c51编程头文件* 编程者:ZPZ* 编程时间:2009/10/2* 说明:用到的全局变量是:无符号字符型变量temp(测得的温度整数部分),temp_d* (测得的温度小数部分),标志位f(测量温度的标志位‘0’表示“正温度”‘1’表* 示“负温度”),标志位f_max(上限温度的标志位‘0’表示“正温度”、‘1’表* 示“负温度”),标志位f_min(下限温度的标志位‘0’表示“正温度”、‘1’表* 示“负温度”),标志位w(报警标志位‘1’启动报警‘0’关闭报警)。
1.四位一体数码管的第一个数码管显示8 #include<reg52.h>sbit dula=P2^6;sbit wela=P2^7;void main(){wela=1;P0=0x01;wela=0;dula=1;P0=0x80;dula=0;while(1);}2.四位数码管同时从0到F变化#include<reg52.h>#define uchar unsigned char#define uint unsigned intsbit dula=P2^6;sbit wela=P2^7;uchar num;uchar code table[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x98,0x83,0xc6,0xa1,0x86,0x8e};void delayms(uint);void main(){wela=1;P0=0x0f;wela=0;while(1){for(num=0;num<16;num++){dula=1;P0=table[num];dula=0;delayms(500);}}}void delayms(uint xms){uint i,j;for(i=xms;i>0;i--)for(j=110;j>0;j--);}3.四位数码管分别以1,2,3,4进行循环显示#include<reg52.h>#define uchar unsigned char#define uint unsigned intsbit dula=P2^6;sbit wela=P2^7;uchar code table[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x98,0x83,0xc6,0xa1,0x86,0x8e};void delayms(uint);void main(){while(1){dula=1;P0=table[1];dula=0;P0=0x00; //送段选数据前关闭所有显示,防止打开位选wela=1; //锁存器时原来段选数据通过位选锁存器造成混乱P0=0x01;wela=0;delayms(500);dula=1;P0=table[2];dula=0;P0=0x00;wela=1;P0=0x02;wela=0;delayms(500);dula=1;P0=table[3];dula=0;P0=0x00;wela=1;P0=0x04;wela=0;delayms(500);dula=1;P0=table[4];dula=0;P0=0x00;wela=1;P0=0x08;wela=0;delayms(500);}}void delayms(uint xms) {uint i,j;for(i=xms;i>0;i--)for(j=110;j>0;j--); }。
51单片机数码管计算器的原理
51单片机数码管计算器的原理
1. 引言
51单片机数码管计算器是一款基于51单片机的嵌入式微控制器,可以实现基本的数学运算,具有简单、实用的特点。
2. 基本原理
该计算器主要由51单片机、数码管显示器以及按键组成。
当用户输入运算符和数字后,计算器会通过按键扫描获取输入,并根据运算符确定具体计算方式。
计算结果会在数码管上进行显示。
3. 系统设计
a. 硬件设计
该计算器采用了通用扫描键盘进行输入,通过定时器产生频率一定的脉冲信号,从而实现按键输入的检测和判断。
同时,采用了数码管进行计算结果的显示。
b. 软件设计
该计算器需要编写实时监控程序进行键盘输入检测、计算运算符和数字,最终输出结果。
具体实现时,可以采用循环检测方式,保证计算器能够平稳地运行。
4. 主要功能及实现过程
a. 加减乘除运算:通过按键进行输入,然后根据加减乘除不同运算方式进行计算,最终得出结果。
b. 括号运算:通过读取括号内的计算式,然后按照优先级依次进行运算,最终得出结果。
c. 退格功能:实现对输入错误的数字进行删除操作。
d. 清零功能:实现对当前输入数字进行清空操作。
5. 总结
51单片机数码管计算器具有实用、简单的特点,可以满足一般生活计算需求。
同时,对于初学者,也是一款比较好的学习案例。
51单片机数码管动态显示分析
51单片机数码管动态显示是一种常见的数字显示方式,其主要通过控制不同位数的数码管,使其依次显示数字,从而实现数字动态显示的效果。
以下将从原理和实现两个方面对51单片机数码管动态显示进行分析。
一、原理分析
51单片机数码管动态显示的原理主要分为两部分,分别为定时器控制和位选控制。
定时器控制:在51单片机中使用定时器是为了保证数字动态显示的稳定性。
通过定时器中断的方式来控制数码管的显示时间,使得每个数字都有足够的时间显示,并且切换速度平稳。
位选控制:在数码管动态显示过程中,需要依次控制不同位数的数码管显示数字。
这是通过位选控制器实现的,它会依次选中各位数码管,并显示出要显示的数字。
这个过程会不停地重复,从而实现数字的动态显示。
二、实现分析
51单片机数码管动态显示的实现需要以下几个步骤:
1. 确定使用的数码管数量及其接口:需要确定使用几个数码管以及它们的引脚分别对应的单片机IO口。
2. 编写显示函数:编写一个函数来控制数码管的动态显示,其中需要实现定时器中断以及位选控制的功能。
3. 循环调用显示函数:将编写好的显示函数放到主函数中进行调用,并不断地循环执行,从而实现数字的动态显示。
需要注意的是,在编写显示函数的过程中,需要确定定时器中断的时间间隔、位选控制的顺序以及每个数码管对应的IO口。
这些因素会直接影响到数字的显示效果,因此需要仔细调试以达到最佳的显示效果。
在实现过程中,还需要考虑到如何读取用户输入并将其显示在数码管上。
一种常见的方式是通过外部按键来读取用户输入,然后通过数码管动态显示的方式,将输入的数字依次显示出来。
总之,51单片机数码管动态显示是一种常见的数字显示方式,其实现原理和步骤相对比较简单。
需要注意的是,在实际应用中还需要结合实际需求进行相应的调整,以达到最佳的显示效果。