
1. 计算齿轮机构的自由度. 解:由于B. C 副中之一为虚约束,计算机构自由度时,应将 C 副去除。即如下 图所示: 该机构的自由度1213233231=?-?-?=--=h p p n F 2. .机构具有确定运动的条件是什么如果不能满足这一条件,将会产生什么结果 机构在滚子B 处有一个局部自由度,应去除。 该机构的自由度017253231=-?-?=--=h p p n F 定轴轮系 A B C 1 2 3 4 图2-22 A B C D G E H F
当自由度F=1时,该机构才能运动, 如果不能满足这一条件,该机构无法运动。 该机构当修改为下图机构,则机构可动: N=4, PL=5, Ph=1; F=?-?-= 自由度342511 3. 计算机构的自由度. 1)由于机构具有虚约束, 机构可转化为下图机构。 F=?-?-= 自由度342511
2)由于机构具有虚约束, 机构可转化为下图机构。 F=?-?= 自由度31211 3)由于机构具有虚约束, 机构可转化为下图机构。 F=?-?= 自由度33241 第一章平面机构的运动简图及自由度 一、判断题(认为正确的,在括号内画√,反之画×) 1.机构是由两个以上构件组成的。() 2.运动副的主要特征是两个构件以点、线、面的形式相接触。() 3.机构具有确定相对运动的条件是机构的自由度大于零。() 4.转动副限制了构件的转动自由度。() 5.固定构件(机架)是机构不可缺少的组成部分。() 个构件在一处铰接,则构成4个转动副。() 7.机构的运动不确定,就是指机构不能具有相对运动。() 8.虚约束对机构的运动不起作用。() 二、选择题 1.为使机构运动简图能够完全反映机构的运动特性,则运动简图相对于与实际机构的()应相同。 A.构件数、运动副的类型及数目 B.构件的运动尺寸 C.机架和原动件 D. A 和B 和C 2.下面对机构虚约束的描述中,不正确的是()。 A.机构中对运动不起独立限制作用的重复约束称为虚约束,在计算机构自由度时应除去虚约束。 B.虚约束可提高构件的强度、刚度、平稳性和机构工作的可靠性等。 C.虚约束应满足某些特殊的凡何条件,否则虚约束会变成实约束而影响机构的正常运动。为此应规定相应的制造精度要求。虚约束还使机器的结构复杂,成本增加。 D.设计机器时,在满足使用要求的情况卜,含有的虚约束越多越好。 三、综合题
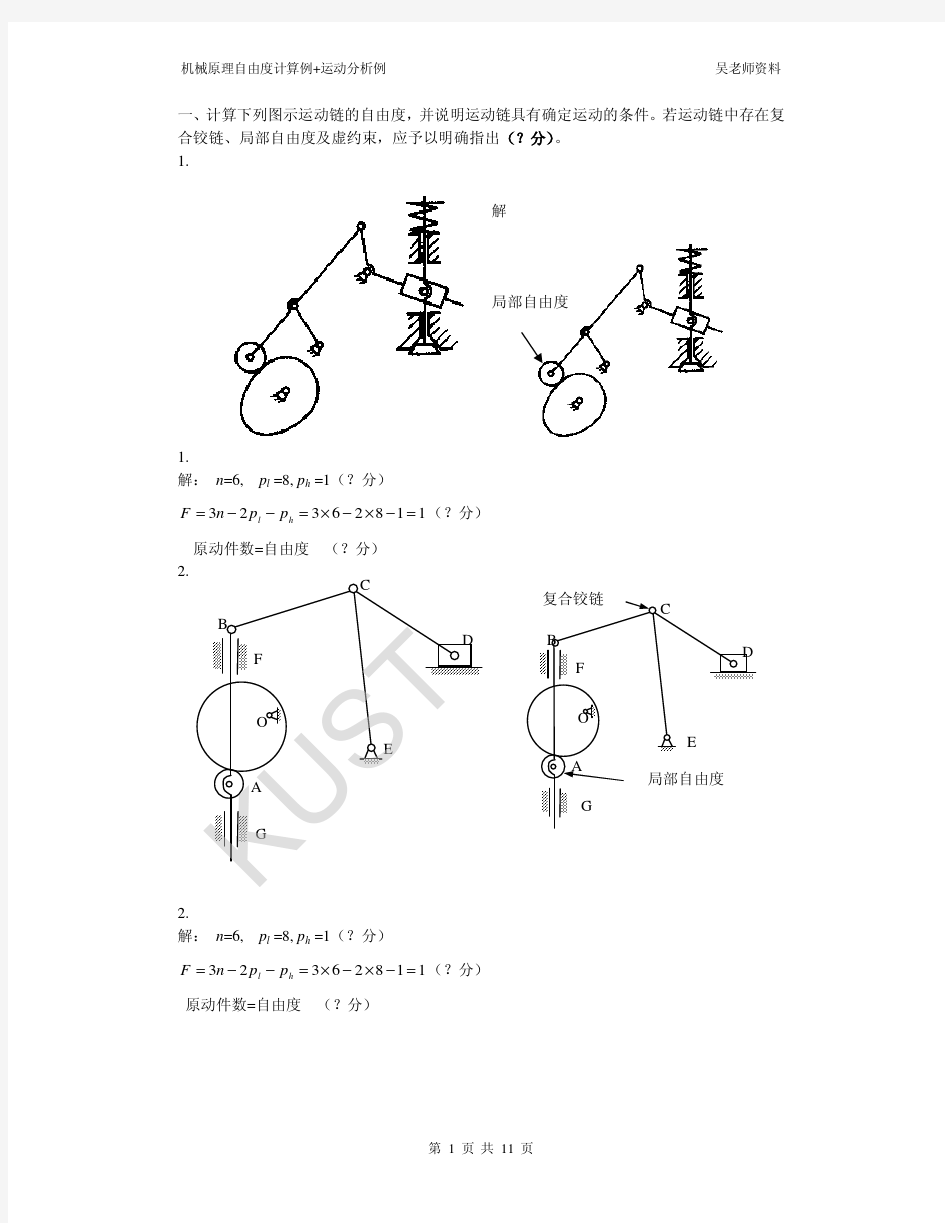
一、计算下列图示运动链的自由度,并说明运动链具有确定运动的条件。若运动链中存在复合铰链、局部自由度及虚约束,应予以明确指出(?分)。 1. 1. 解: n =6, p l =8, p h =1(?分) 11826323=-?-?=--=h l p p n F (?分) 原动件数=自由度 (?分) 2. 2. 解: n =6, p l =8, p h =1(?分) 11826323=-?-?=--=h l p p n F (?分) 原动件数=自由度 (?分) 解 局部自由度 F D C O B G A E F D C O B G A E 局部自由度 复合铰链
A B C E E' O D F 3. 3. 解: n =7, p l =9, p h =1(?分) 21927323=-?-?=--=h l p p n F (?分) 原动件数=自由度 (?分) 4. 4. 解: n =4, p l =5, p h =1(?分) 11524323=-?-?=--=h l p p n F (?分) 原动件数=自由度 (?分) 5. 5. 解: n =7, p l =10, p h =0(?分) 11027323=?-?=--=h l p p n F (?分) 原动件数=自由度 (?分) B E' F' D F E A B C B E' F' D F E A B C 局部自由度 复合铰链 局部自由度 复合铰链 A B C E E' O D F
6. 解: n =7, p l =9, p h =1(?分) 21927323=-?-?=--=h l p p n F (?分) 原动件数=自由度 (?分) 7. B D E F A C 7. 解: n =5, p l =7, p h =0(?分) 10725323=-?-?=--=h l p p n F (?分) 原动件数=自由度 (?分) 8计算下列图示运动链的自由度,并说明运动链具有确定运动的条件。若运动链中存在复合铰链、局部自由度及虚约束,应予以明确指出(?分)。 8. 解: n =7, p l =9, p h =2(?分) 12927323=-?-?=--=h l p p n F (?分) 原动件数=自由度 (?分) 等宽凸轮 等宽凸轮 复合铰链 B D E F A C 复合铰链 局部自由度 复合铰链
00002、具有、、等三个特征的构件组合体称为机器。 00003、机器是由、、所组成的。 00004、机器和机构的主要区别在于。 00005、从机构结构观点来看,任何机构是由三部分组成。 00006、运动副元素是指。 00007、构件的自由度是指;机构的自由度是指。 00008、两构件之间以线接触所组成的平面运动副,称为副,它产生个约束,而保留了个自由度。 00009、机构中的运动副是指。 00010、机构具有确定的相对运动条件是原动件数机构的自由度。 00011、在平面机构中若引入一个高副将引入______个约束,而引入一个低副将引入_____个约束,构件数、约束数与机构自由度的关系是。 00012、平面运动副的最大约束数为,最小约束数为。 00013、当两构件构成运动副后,仍需保证能产生一定的相对运动,故在平面机构中,每个运动副引入的约束至多为,至少为。 00014、 00015、计算机机构自由度的目的是 __________________________________________________________。 00016、在平面机构中,具有两个约束的运动副是副,具有一个约束的运动副是副。 00017、计算平面机构自由度的公式为F ,应用此公式时应注意判断:(A)
铰链,(B) 自由度,(C) 约束。 00018、机构中的复合铰链是指;局部自由度是指;虚约束是指。 00019、划分机构的杆组时应先按的杆组级别考虑,机构的级别按杆组中的级别确定。 00020、机构运动简图是的简单图形。 00021、在图示平面运动链中,若构件1为机架,构件5为原动件,则成为级机构;若以构件2为机架,3为原动件,则成为级机构;若以构件4为机架,5为原动件,则成为级机构。 00022、机器中独立运动的单元体,称为零件。- - - - - - - - - - - - - - - - - - - - - - - - - ( ) 00023、具有局部自由度和虚约束的机构,在计算机构的自由度时,应当首先除去局部自由度和虚约束。( ) 00024、机构中的虚约束,如果制造、安装精度不够时,会成为真约束。( ) 00025、任何具有确定运动的机构中,除机架、原动件及其相连的运动副以外的从动件系统的自由度都等于零。( ) 00026、六个构件组成同一回转轴线的转动副,则该处共有三个转动副。- - - - - - - - ( ) 00027、当机构的自由度F0,且等于原动件数,则该机构即具有确定的相对运动。( )
第2章机构的结构分析 1.判断题 (1)机构能够运动的基本条件是其自由度必须大于零。 (错误 ) (2)在平面机构中,一个高副引入两个约束。 (错误 ) (3)移动副和转动副所引入的约束数目相等。 (正确 ) (4)一切自由度不为一的机构都不可能有确定的运动。 (错误 ) (5)一个作平面运动的自由构件有六个自由度。 (错误 ) 2.选择题 (1) 两构件构成运动副的主要特征是( D )。 A .两构件以点线面相接触 B .两构件能作相对运动 C .两构件相连接 D .两构件既连接又能作一定的相对运动 (2) 机构的运动简图与( D )无关。 A .构件数目 B .运动副的类型 C .运动副的相对位置 D .构件和运动副的结构 (3) 有一构件的实际长度0.5m L =,画在机构运动简图中的长度为20mm ,则画此机 构运动简图时所取的长度比例尺l μ是( D )。 A .25 B .25mm/m C .1:25 D .0.025m/mm (4) 用一个平面低副连接两个做平面运动的构件所形成的运动链共有(B )个自由度。 A .3 B .4 C .5 D .6 (5) 在机构中,某些不影响机构运动传递的重复部分所带入的约束为(A )。 A .虚约束 B .局部自由度 C .复合铰链 D .真约束 (6) 机构具有确定运动的条件是( D )。 A .机构的自由度0≥F B .机构的构件数4≥N C .原动件数W >1 D .机构的自由度F >0, 并且=F 原动件数W (7) 如图2-34所示的三种机构运动简图中,运动不确定是( C )。 A .(a )和(b ) B .(b )和(c ) C .(a )和(c ) D .(a )、(b )和(c ) (8) Ⅲ级杆组应由( B )组成。 (a) (c) (b) 图2-34
第2章机构的组成原理与结构分析 第3章平面机构的运动分析 一、填空题 1、在平面机构中具有一个约束的运动副是副。 2、使两构件直接接触并能产生一定相对运动的联接称为。 3、平面机构中的低副有转动副和副两种。 4、平面机构中的低副有副和移动副两种。 5、机构中的构件可分为三类:固定构件(机架)、原动件(主动件)、件。 6、机构中的构件可分为三类:固定构件(机架)、从动件。 7、机构中的构件可分为三类:、原动件(主动件)、从动件。 8、在平面机构中若引入一个高副将引入个约束。 9、在平面机构中若引入一个低副将引入个约束。 10、在平面机构中具有两个约束的运动副是副。 11、速度瞬心是两刚体上为零的重合点。 12、当两构件组成回转副时,其相对速度瞬心在。 13、当两构件不直接组成运动副时,其瞬心位置用确定。 二、判断题 1、具有局部自由度的机构,在计算机构的自由度时,应当首先除去局部自由度。() 2、具有虚约束的机构,在计算机构的自由度时,应当首先除去虚约束。() 3、虚约束对运动不起作用,也不能增加构件的刚性。() 4、若两个构件之间组成两个导路平行的移动副,在计算自由度时应算作两个移动副。() 5、若两个构件之间组成两个轴线重合的转动副,在计算自由度时应算作两个转动副。() 6、六个构件组成同一回转轴线的转动副,则该处共有三个转动副。() 7、当机构的自由度F>0,且等于原动件数,则该机构具有确定的相对运动。() 8、虚约束对机构的运动有限制作用。() 9、瞬心是两构件上瞬时相对速度为零的重合点。() 10、利用瞬心既可以求机构的速度,又可以求加速度。() 三、选择题 1、机构中的构件是由一个或多个零件所组成,这些零件间产生相对运动。 A、可以 B、不能 C、不一定能 2、原动件的自由度应为。 A、0 B、1 C、2 3、在机构中原动件数目机构的自由度时,该机构具有确定的运动。 A、大于 B、等于 C、小于 4、机构具有确定运动的条件是。 A、自由度大于零 B、自由度等于原动件数 C、自由度大于1 5、由K 个构件汇交而成的复合铰链应具有个转动副。 A、K-1 B、K C、K+1
五. 计算题 (每小题10 分, 共20分) 1.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 C处是复合铰链;无局部自由度和虚约束;(3分) 自由度:F=3n-2P L-P h (2分)n=5 P L =7 P h=0 (3分) =3*5-2*7-0=1 (1分) 机构具有确定运动(1分) 2.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 C处是复合铰链;F是局部自由度;E、E′互为虚约束;(3分) 自由度:F=3n-2P L-P h (2分)n=7 P L =9 P h=1 (1分) =3*7-2*9-1=2 (1分) 机构具有确定运动(1分) 有确定的运动(2分) 3.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。
无复合铰链和虚约束;有局部自由度;(3分) 自由度:F=3n-2P L-P h (2分)n=4 P L =4 P h=2 (3分) =3*4-2*4-2=2 (1分) 有确定的运动(1分) 4.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 E处是复合铰链;无局部自由度和虚约束;(3分) 自由度:F=3n-2P L-P h (2分)n=7 P L =10 P h=0 (3分) =3*7-2*10=1 (1分) 机构具有确定运动(1分) 5.计算图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。
机构有复合铰链、局部自由度、虚约束;(3分) 自由度:F=3n-2P L -P h (2分)n=8 P L =11 P h =1 (3分) F=3*8-2*11-1=1(1分) 机构具有确定运动 (1分) 6.在图示的车床变速箱中,移动三联齿轮a 使齿轮3’和4’啮合。又移动双联齿轮b 使齿轮5’和6’啮合。已知各轮的齿数为48',50',42',38',58,42654321======z z z z z z ,电动机的转速m in /14451r n =,求带轮转速的大小和方向。 47.150 3842484258''''53164261'16-≈????-='-==z z z z z z n n i min /98347.11445''1616r i n n -≈-== 其运动方向与1相反
机械原理计算题 公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]
五. 计算题 (每小题10 分, 共20分) 1.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 C处是复合铰链;无局部自由度和虚约束;(3分) 自由度:F=3n-2P L -P h (2分)n=5 P L =7 P h =0 (3分) =3*5-2*7-0=1 (1分) 机构具有确定运动(1分) 2.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 C处是复合铰链;F是局部自由度;E、E′互为虚约束;(3分) 自由度:F=3n-2P L -P h (2分)n=7 P L =9 P h =1 (1分) =3*7-2*9-1=2 (1分) 机构具有确定运动(1分) 有确定的运动(2分) 3.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 无复合铰链和虚约束;有局部自由度;(3分)
自由度:F=3n-2P L -P h (2分)n=4 P L =4 P h =2 (3分) =3*4-2*4-2=2 (1分) 有确定的运动(1分) 4.计算下图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 E处是复合铰链;无局部自由度和虚约束;(3分) 自由度:F=3n-2P L -P h (2分)n=7 P L =10 P h =0 (3分) =3*7-2*10=1 (1分) 机构具有确定运动(1分) 5.计算图示机构的自由度,指出复合铰链、局部自由度和虚约束,并判断机构是否具有确定运动。 机构有复合铰链、局部自由度、虚约束;(3分) 自由度:F=3n-2P L -P h (2分)n=8 P L =11 P h =1 (3分) F=3*8-2*11-1=1(1分) 机构具有确定运动(1分)
第二章习题及解答 2-1 如题图2-1所示为一小型冲床,试绘制其机构运动简图,并计算机构自由度。 (a)(b) 题图2-1 解: 1)分析 该小型冲床由菱形构件1、滑块2、拨叉3和圆盘4、连杆5、冲头6等构件组成,其中菱形构件1为原动件,绕固定点A作定轴转动,通过铰链B与滑块2联接,滑块2与拨叉3构成移动副,拨叉3与圆盘4固定在一起为同一个构件且绕C轴转动,圆盘通过铰链与连杆5联接,连杆带动冲头6做往复运动实现冲裁运动。 2)绘制机构运动简图 选定比例尺后绘制机构运动简图如图(b)所示。 3)自由度计算 其中n=5,P L=7, P H=0, F=3n-2P L-P H=3×5-2×7=1 故该机构具有确定的运动。 2-2 如题图2-2所示为一齿轮齿条式活塞泵,试绘制其机构运动简图,并计算机构自由度。
(a)(b) 题图2-2 解: 1)分析 该活塞泵由飞轮曲柄1、连杆2、扇形齿轮3、齿条活塞4等构件组成,其中飞轮曲柄1为原动件,绕固定点A作定轴转动,通过铰链B与连杆2联接,连杆2通过铰链与扇形齿轮3联接,扇形齿轮3通过高副接触驱动齿条活塞4作往复运动,活塞与机架之间构成移动副。 2) 绘制机构运动简图 选定比例尺后绘制机构运动简图如图(b)所示。 3)自由度计算 其中n=4,P L=5, P H=1 F=3n-2P L-P H=3×4-2×5-1=1 故该机构具有确定的运动。 2-3 如图2-3所示为一简易冲床的初步设计方案,设计者的意图是电动机通过一级齿轮1和2减速后带动凸轮3旋转,然后通过摆杆4带动冲头实现上下往复冲压运动。试根据机构自由度分析该方案的合理性,并提出修改后的新方案。